O_plan_Raynaudo_Delg..
Anuncio

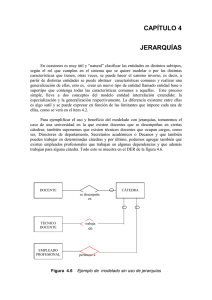
Universidad Nacional de Rosario Facultad de Ciencias Exactas, Ingeniería y Agrimensura Departamento de sistemas e informática INGENIERIA DEL CONOCIMIENTO Trabajo práctico n° 1 Autores: Nombre y Apellido Delgado Freddye Raynaudo Ezequiel Marzo 2011 Nº de Legajo D-2302/7 R-2742/1 Proyecto O-Plan (Arquitectura de planificación abierta) “conceptos de inteligencia artificial aplicados al control de procesos” El proyecto O-Plan explora asuntos de comando, planificación y control coordinados. Su objetivo es desarrollar una arquitectura dentro de la cual diferentes agentes tengan roles de dominio (asignación de tareas), planificación y monitoreo de ejecución. Cada agente tiene una estructura en la cual se separan los siguientes componentes: • representación de capacidades de procesamiento de un agente; • facilidades computacionales disponibles para desarrollar esas capacidades; • manejadores de restricciones y rutinas de soporte de uso común que son útiles en la construcción de sistemas de mando, planificación y control; • toma de decisión acerca de lo que el agente debería hacer a continuación; • manejo de comunicación entre un agente y otro. O-Plan está destinado a ser relevante para los siguientes tipos de problemas: • gestión de proyectos para la introducción de productos, ingeniería de sistemas, la construcción; • ensamble, integración y verificación; • flujo de procesos y planificación de flujo de trabajo; • planificación y control de logísticas de suministro y distribución; • secuencia de la misión y el control de las sondas espaciales como Voyager y ERS-1; • respuesta a crisis. Esas aplicaciones están a medio camino entre los problemas a gran escala de fabricación que se encuentran en algunas industrias y los complejos rompecabezas que se obtienen en herramientas de lógica muy flexible. Sin embargo, los problemas de este tipo representan una clase importante de interés para la industria. Las áreas en las cuales el O-Plan está listo para ser aplicado son las que siguen: • Construcción de plataforma espacial; • Planificación y control satelital; • Construcción de casas y edificios; • Desarrollo de software; • Script de escritura del administrador Unix; • Logística; • Operaciones de evacuación no combatiente; • Respuesta a crisis; • Flujo de planificación de campaña aérea; • Otras demostraciones. Metodología de operación Una capacidad de planificación importante es la generación y perfeccionamiento de los múltiples cursos de acción (COA) para responder ante una crisis o evento en desarrollo (dado que fue concebido principalmente para aplicación militar). Esta propuesta aborda dos áreas clave de importancia para la comunidad de la planificación militar, que también plantean importantes desafíos para la planificación de la comunidad de IA: 1. generación de múltiples cursos, cualitativamente diferentes, de acción dependientes de supuestas alternativas sobre la crisis emergente; 2. Soporte para el desarrollo de sistemas de iniciativa mixta, manipulación y uso de diferentes hipótesis según el nivel de respuesta que deba ejecutarse y los recursos asignados. Los principales temas técnicos abordados en el proyecto son: • Asignación de tareas, análisis y elaboración; • Dominio, Planeamiento y Representación del Trabajo ; • Desarrollo de planes de iniciativa mixta; • Manipulación de los planes como conjuntos de restricciones El trabajo es descripto utilizando una representación común de las tareas, planes, procesos y actividades bajo la noción de que son “restricciones de comportamiento”. Esta representación forma una base para el sistema de iniciativa mixta donde usuario y agentes trabajan juntos para restringir tareas y planes además de coordinar tareas orientadas para ejecutar esos planes. Modelo I-N-OVA El modelo I-N-OVA (Issues - Nodes - Orderings/Variables/Auxiliary) es el encargado de representar los planes como un conjunto de restricciones. Teniendo una clara descripción de los diferentes componentes de un plan, el modelo permite manipular y usar dichos planes separadamente del ambiente en el que se generó. La tesis fundamental es que los planes pueden representarse por un conjunto de restricciones sobre los posibles comportamientos en el dominio modelado y que la comunicación del plan puede tomar lugar a través del intercambio de dicha información de restricciones. Los usuarios y los sistemas pueden trabajar en armonía a través del empleo de una visión común de sus roles como para limitar el espacio de conducta admitida. Puede aplicarse un flujo de trabajo ordenado y prioridades para imponer un estilo específico de autoridad para el plan dentro del sistema. Son posibles un extremo de expansión del plan manejada por el usuario seguida de un sistema de llenado de detalles, o el extremo opuesto de un sistema de planificación completamente conducido en forma automática (tal vez con una ocasional petición a un usuario para tomar decisiones predefinidas). El uso más práctico que prevemos es una forma de iniciativa mixta de interacción en la cual usuarios y sistemas proceden con el plan mediante restricción mutua usando sus propias áreas de fortaleza. Nomenclaturas que utiliza el sistema: I – Asunto, problema (Del inglés Issues, implica restricciones) N – Restricciones de nodo (Del inglés Node) OVA – Restricciones detalladas O – Restricciones de pedidos (Del inglés Ordering Constraints) V – Restricciones de variables (Del inglés Variable Constraints) A - Restricciones auxiliares (Del inglés Auxiliary Constraints) - Restricciones de autoridad - subtipos - restricciones de estado - subtipos - Restricciones de recursos - subtipos - Restricciones espaciales - subtipos - Restricciones misceláneas - subtipos El planeamiento es la toma de decisiones de planificación (I), que selecciona las actividades a realizar (N), que crea, modifica o utiliza los objetos o productos del plan (V) en el momento correcto (O) dentro de la autoridad, los recursos y otras limitaciones específicas (A). Las restricciones de nodo (estas son a menudo de la forma `` include activity'') en el modelo INOVA ajustan el espacio dentro del cual un plan puede ser más restringido. Las limitaciones I y OVA restringen los planes que son válidos dentro de ese espacio. Los problemas (Issues o restricciones I, a veces llamados "fallas" en la planificación del trabajo anterior) son ítems en el programa basado en planificadores sobre los cuales se hace la selección de operadores de modificación de plan.