first day
Anuncio

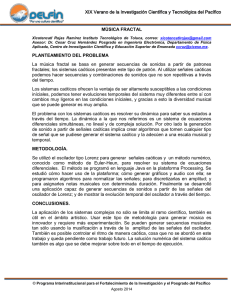
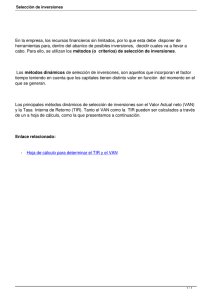
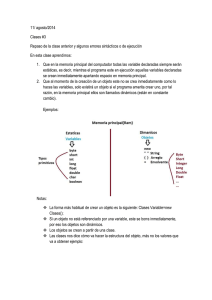
Ejemplos de sistemas dinámicos caóticos: el atractor de Lorenz y la dinámica de la herradura de Smale Ana Rechtman www-irma.u-strasbg.fr/ rechtman/cv.html 1 Ana Rechtman Ejemplos de sistemas dinámicos caóticos 1 / 18 ¿Qué es un sistema dinámico? Tiempo discreto Si tenemos un conjunto X y un mapeo f : X → X tal que el dominio y la imagen se intersectan, entonces podemos analizar el sistema dinámico definido por las iteraciones de f . Ana Rechtman Ejemplos de sistemas dinámicos caóticos 2 / 18 ¿Qué es un sistema dinámico? Tiempo discreto Si tenemos un conjunto X y un mapeo f : X → X tal que el dominio y la imagen se intersectan, entonces podemos analizar el sistema dinámico definido por las iteraciones de f . Ejemplo: rotaciones del círculo X = S1 = [0, 2π)/ ∼ f (x) = x + θ mod(2π). Ana Rechtman Ejemplos de sistemas dinámicos caóticos 2 / 18 ¿Qué es un sistema dinámico? Tiempo discreto Si tenemos un conjunto X y un mapeo f : X → X tal que el dominio y la imagen se intersectan, entonces podemos analizar el sistema dinámico definido por las iteraciones de f . Ejemplo: rotaciones del círculo X = S1 = [0, 2π)/ ∼ f (x) = x + θ mod(2π). ¿Qué pasa con las órbitas? Ana Rechtman Ejemplos de sistemas dinámicos caóticos 2 / 18 ¿Qué es un sistema dinámico? Tiempo discreto Si tenemos un conjunto X y un mapeo f : X → X tal que el dominio y la imagen se intersectan, entonces podemos analizar el sistema dinámico definido por las iteraciones de f . Ejemplo: rotaciones del círculo X = S1 = [0, 2π)/ ∼ f (x) = x + θ mod(2π). ¿Qué pasa con las órbitas? Si θ es un múltiplo racional de π, todas las órbitas son periódicas. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 2 / 18 ¿Qué es un sistema dinámico? Tiempo discreto Si tenemos un conjunto X y un mapeo f : X → X tal que el dominio y la imagen se intersectan, entonces podemos analizar el sistema dinámico definido por las iteraciones de f . Ejemplo: rotaciones del círculo X = S1 = [0, 2π)/ ∼ f (x) = x + θ mod(2π). ¿Qué pasa con las órbitas? Si θ es un múltiplo racional de π, todas las órbitas son periódicas. Si θ no es un múltiplo racional de π, entonces todas las órbitas son densas. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 2 / 18 Sistema dinámico con tiempo discreto Ejemplo: dinámica sur-norte Ana Rechtman Ejemplos de sistemas dinámicos caóticos 3 / 18 Sistema dinámico con tiempo discreto Ejemplo: dinámica sur-norte Hay dos puntos fijos, los polos S y N. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 3 / 18 Sistema dinámico con tiempo discreto Ejemplo: dinámica sur-norte Hay dos puntos fijos, los polos S y N. Para todo otro punto, limn→∞ f n (x) = N limn→−∞ f n (x) = S Ana Rechtman Ejemplos de sistemas dinámicos caóticos 3 / 18 ¿Qué es un sistema dinámico? Tiempo continuo Si tenemos en Rn una ecuación diferencial X 0 = F (X ), con F : Rn → Rn . Las soluciones definen un flujo en Rn . Ana Rechtman Ejemplos de sistemas dinámicos caóticos 4 / 18 ¿Qué es un sistema dinámico? Tiempo continuo Si tenemos en Rn una ecuación diferencial X 0 = F (X ), con F : Rn → Rn . Las soluciones definen un flujo en Rn . Observación F podría ser una aplicación que depende del tiempo, es decir, tendríamos una ecuación diferencial de la forma x 0 = F (x, t). En este caso la ecuación no es autónoma. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 4 / 18 Sistema dinámico con tiempo continuo Ejemplo: una suspensión, pasar de tiempo discreto a continuo Ana Rechtman Ejemplos de sistemas dinámicos caóticos 5 / 18 Sistema dinámico con tiempo continuo Ejemplo: una suspensión, pasar de tiempo discreto a continuo Ejemplo: un campo lineal en R2 Ana Rechtman Ejemplos de sistemas dinámicos caóticos 5 / 18 Sistema dinámico con tiempo continuo Ejemplo: una suspensión, pasar de tiempo discreto a continuo Ejemplo: un campo lineal en R2 0 x 2 0 x 0 X = = 0 y 0 −1/2 y Ana Rechtman Ejemplos de sistemas dinámicos caóticos 5 / 18 Sistema dinámico con tiempo continuo Ejemplo: una suspensión, pasar de tiempo discreto a continuo Ejemplo: un campo lineal en R2 0 x 2 0 x 0 X = = 0 y 0 −1/2 y Observemos que el origen es un punto fijo, pues el campo vectorial es nulo. Decimos que el origen es una singularidad del campo vectorial. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 5 / 18 Sistema dinámico con tiempo continuo Ejemplo: una suspensión, pasar de tiempo discreto a continuo Ejemplo: un campo lineal en R2 0 x 2 0 x 0 X = = 0 y 0 −1/2 y Observemos que el origen es un punto fijo, pues el campo vectorial es nulo. Decimos que el origen es una singularidad del campo vectorial. ¿Qué podemos decir sobre el comportamiento cerca del origen? Ana Rechtman Ejemplos de sistemas dinámicos caóticos 5 / 18 Sistema dinámico con tiempo continuo Ejemplo en el intervalo [0, 1] ⊂ R x 0 = cx(1 − x) c>1 en x = 0 y x = 1 el campo vectorial es singular, por lo que son puntos fijos. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 6 / 18 Sistema dinámico con tiempo continuo Ejemplo en el intervalo [0, 1] ⊂ R x 0 = cx(1 − x) c>1 en x = 0 y x = 1 el campo vectorial es singular, por lo que son puntos fijos. para toda x0 ∈ (0, 1) la solución x(t) de la ecuación diferencial con x(0) = x0 satisface: limt→∞ x(t) = 1 limt→−∞ x(t) = 0 Ana Rechtman Ejemplos de sistemas dinámicos caóticos 6 / 18 Sistema dinámico con tiempo continuo Ejemplo en el intervalo [0, 1] ⊂ R x 0 = cx(1 − x) c>1 en x = 0 y x = 1 el campo vectorial es singular, por lo que son puntos fijos. para toda x0 ∈ (0, 1) la solución x(t) de la ecuación diferencial con x(0) = x0 satisface: limt→∞ x(t) = 1 limt→−∞ x(t) = 0 El mapeo x 7→ x(1 − x) = x − x 2 tiene como derivada c(1 − 2x), Ana Rechtman Ejemplos de sistemas dinámicos caóticos 6 / 18 Sistema dinámico con tiempo continuo Ejemplo en el intervalo [0, 1] ⊂ R x 0 = cx(1 − x) c>1 en x = 0 y x = 1 el campo vectorial es singular, por lo que son puntos fijos. para toda x0 ∈ (0, 1) la solución x(t) de la ecuación diferencial con x(0) = x0 satisface: limt→∞ x(t) = 1 limt→−∞ x(t) = 0 El mapeo x 7→ x(1 − x) = x − x 2 tiene como derivada c(1 − 2x), x = 0, Ana Rechtman la derivada vale c ⇒0 Ejemplos de sistemas dinámicos caóticos es inestable 6 / 18 Sistema dinámico con tiempo continuo Ejemplo en el intervalo [0, 1] ⊂ R x 0 = cx(1 − x) c>1 en x = 0 y x = 1 el campo vectorial es singular, por lo que son puntos fijos. para toda x0 ∈ (0, 1) la solución x(t) de la ecuación diferencial con x(0) = x0 satisface: limt→∞ x(t) = 1 limt→−∞ x(t) = 0 El mapeo x 7→ x(1 − x) = x − x 2 tiene como derivada c(1 − 2x), x = 0, la derivada vale c x = 1, la derivada vale -c Ana Rechtman ⇒0 ⇒1 Ejemplos de sistemas dinámicos caóticos es inestable es estable 6 / 18 Las ecuaciones de Lorenz Edward N. Lorenz (1917 - 2008), Ana Rechtman Ejemplos de sistemas dinámicos caóticos 7 / 18 Las ecuaciones de Lorenz Edward N. Lorenz (1917 - 2008), en 1967 propone el siguiente sistema de ecuaciones: x 0 = σ(y − x) y 0 = rx − y − xz z 0 = xy − bz. con σ, r , b > 0 Ana Rechtman Ejemplos de sistemas dinámicos caóticos 7 / 18 Las ecuaciones de Lorenz Edward N. Lorenz (1917 - 2008), en 1967 propone el siguiente sistema de ecuaciones: x 0 = σ(y − x) y 0 = rx − y − xz z 0 = xy − bz. con σ, r , b > 0 (σ = 10, b = 8/3, r = 28). Ana Rechtman Ejemplos de sistemas dinámicos caóticos 7 / 18 Las ecuaciones de Lorenz Edward N. Lorenz (1917 - 2008), en 1967 propone el siguiente sistema de ecuaciones: x 0 = σ(y − x) y 0 = rx − y − xz z 0 = xy − bz. con σ, r , b > 0 (σ = 10, b = 8/3, r = 28). Primeras observaciones Ana Rechtman Ejemplos de sistemas dinámicos caóticos 7 / 18 Las ecuaciones de Lorenz Edward N. Lorenz (1917 - 2008), en 1967 propone el siguiente sistema de ecuaciones: x 0 = σ(y − x) y 0 = rx − y − xz z 0 = xy − bz. con σ, r , b > 0 (σ = 10, b = 8/3, r = 28). Primeras observaciones La simetría (x, y , z) 7→ (−x, −y , z) deja el sistema de ecuaciones invariante. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 7 / 18 Puntos fijos (0, 0, 0) es un punto fijo. ¿Hay otros? Ana Rechtman Ejemplos de sistemas dinámicos caóticos 8 / 18 Puntos fijos (0, 0, 0) es un punto fijo. ¿Hay otros? x0 = 0 ⇒ x = y, x2 z0 = 0 ⇒ z = , b y 0 = 0 ⇒ x(r − 1) − Ana Rechtman x3 = 0. b Ejemplos de sistemas dinámicos caóticos 8 / 18 Puntos fijos (0, 0, 0) es un punto fijo. ¿Hay otros? x0 = 0 ⇒ x = y, x2 z0 = 0 ⇒ z = , b y 0 = 0 ⇒ x(r − 1) − x3 = 0. b La última ecuación es equivalente a x2 = r − 1, b con soluciones x = Ana Rechtman p b(r − 1). Ejemplos de sistemas dinámicos caóticos 8 / 18 Puntos fijos x2 = r − 1, b Como b, r > 0, distinguimos dos casos: Si 0 < r ≤ 1, el único punto fijo es el origen. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 9 / 18 Puntos fijos x2 = r − 1, b Como b, r > 0, distinguimos dos casos: Si 0 < r ≤ 1, el único punto fijo es el origen. Si r > 1, tenemos dos nuevos puntos fijos p p p1 = ( b(r − 1), b(r − 1), r − 1) p p p2 = (− b(r − 1), − b(r − 1), r − 1). Ana Rechtman Ejemplos de sistemas dinámicos caóticos 9 / 18 ¿Qué más podemos decir de los puntos fijos? Aproximación por la diferencial f : Rn → Rn de clase C 2 en una vecindad de un punto x0 , entonces f (x) = f (x0 ) + Df (x0 )(x − x0 ) + o(x − x0 ) )k con limy →0 ko(y ky k = 0. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 10 / 18 ¿Qué más podemos decir de los puntos fijos? Aproximación por la diferencial f : Rn → Rn de clase C 2 en una vecindad de un punto x0 , entonces f (x) = f (x0 ) + Df (x0 )(x − x0 ) + o(x − x0 ) )k con limy →0 ko(y ky k = 0. En el caso de una ecuación diferencial X 0 = F (X ) las soluciones cerca de un punto fijo se pueden aproximar por DF evaluada en el punto fijo. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 10 / 18 ¿Qué más podemos decir de los puntos fijos? Aproximación por la diferencial f : Rn → Rn de clase C 2 en una vecindad de un punto x0 , entonces f (x) = f (x0 ) + Df (x0 )(x − x0 ) + o(x − x0 ) )k con limy →0 ko(y ky k = 0. En el caso de una ecuación diferencial X 0 = F (X ) las soluciones cerca de un punto fijo se pueden aproximar por DF evaluada en el punto fijo. F (x, y , z) = (σ(y − x), rx − y − xz, xy − bz), Ana Rechtman Ejemplos de sistemas dinámicos caóticos 10 / 18 ¿Qué más podemos decir de los puntos fijos? Aproximación por la diferencial f : Rn → Rn de clase C 2 en una vecindad de un punto x0 , entonces f (x) = f (x0 ) + Df (x0 )(x − x0 ) + o(x − x0 ) )k con limy →0 ko(y ky k = 0. En el caso de una ecuación diferencial X 0 = F (X ) las soluciones cerca de un punto fijo se pueden aproximar por DF evaluada en el punto fijo. F (x, y , z) = (σ(y − x), rx − y − xz, xy − bz), −σ σ 0 DF (x, y , z) = r − z −1 −x y x −b Ana Rechtman Ejemplos de sistemas dinámicos caóticos 10 / 18 Descripción de los puntos fijos ¿Cuál es el valor de DF en el origen? Ana Rechtman Ejemplos de sistemas dinámicos caóticos 11 / 18 Descripción de los puntos fijos ¿Cuál es el valor de DF en el origen? En el origen, −σ σ 0 DF (0, 0, 0) = r −1 0 0 0 −b Ana Rechtman Ejemplos de sistemas dinámicos caóticos 11 / 18 Descripción de los puntos fijos ¿Cuál es el valor de DF en el origen? En el origen, −σ σ 0 DF (0, 0, 0) = r −1 0 0 0 −b ¿Qué podemos decir de los valores propios? Ana Rechtman Ejemplos de sistemas dinámicos caóticos 11 / 18 Descripción de los puntos fijos ¿Cuál es el valor de DF en el origen? En el origen, −σ σ 0 DF (0, 0, 0) = r −1 0 0 0 −b ¿Qué podemos decir de los valores propios? −b es un valor propio con espacio propio el generado por (0, 0, 1). Ana Rechtman Ejemplos de sistemas dinámicos caóticos 11 / 18 Descripción de los puntos fijos ¿Cuál es el valor de DF en el origen? En el origen, −σ σ 0 DF (0, 0, 0) = r −1 0 0 0 −b ¿Qué podemos decir de los valores propios? −b es un valor propio con espacio propio el generado por (0, 0, 1). Los otros dos valores propios corresponden a raíces de λ2 + (σ + 1)λ + σ(1 − r ) = 0 Ana Rechtman Ejemplos de sistemas dinámicos caóticos 11 / 18 Descripción de los puntos fijos ¿Cuál es el valor de DF en el origen? En el origen, −σ σ 0 DF (0, 0, 0) = r −1 0 0 0 −b ¿Qué podemos decir de los valores propios? −b es un valor propio con espacio propio el generado por (0, 0, 1). Los otros dos valores propios corresponden a raíces de λ2 + (σ + 1)λ + σ(1 − r ) = 0 λ = Ana Rechtman −σ − 1 ± Ejemplos de sistemas dinámicos caóticos p (σ − 1)2 + 4r 2 11 / 18 Descripción de los puntos fijos p (σ − 1)2 + 4r λ= 2 Para 0 < r < 1, las dos soluciones son negativas ⇒ el origen es un punto atractivo. −σ − 1 ± Ana Rechtman Ejemplos de sistemas dinámicos caóticos 12 / 18 Descripción de los puntos fijos p (σ − 1)2 + 4r λ= 2 Para 0 < r < 1, las dos soluciones son negativas ⇒ el origen es un punto atractivo. Para r > 1, uno de las soluciones es positiva ⇒ el origen es un punto hiperbólico. −σ − 1 ± Para r > 1 pequeña, todos los valores propios de DF (pi ) son reales y negativos. Ana Rechtman Ejemplos de sistemas dinámicos caóticos 12 / 18 Descripción de los puntos fijos p (σ − 1)2 + 4r λ= 2 Cuando r crece, dos de los valores propios DF (pi ) se vuelven complejos y ambox puntos siguen siendo atractores. −σ − 1 ± Ana Rechtman Ejemplos de sistemas dinámicos caóticos 13 / 18 Descripción de los puntos fijos p (σ − 1)2 + 4r λ= 2 Cuando r llega al punto de transición r0 ∼ 13,926, −σ − 1 ± Ana Rechtman Ejemplos de sistemas dinámicos caóticos 14 / 18 Descripción de los puntos fijos λ= −σ − 1 ± p (σ − 1)2 + 4r 2 Finalmente para r > r0 Ana Rechtman Ejemplos de sistemas dinámicos caóticos 15 / 18 Atractor de Lorenz Ana Rechtman Ejemplos de sistemas dinámicos caóticos 16 / 18 La herradura de Smale Ana Rechtman Ejemplos de sistemas dinámicos caóticos 17 / 18 La herradura de Smale Ana Rechtman Ejemplos de sistemas dinámicos caóticos 17 / 18 La herradura de Smale Describir la región D2 del cuadrado C tal que f (D2 ) ⊂ C Ana Rechtman Ejemplos de sistemas dinámicos caóticos 18 / 18 La herradura de Smale Describir la región D2 del cuadrado C tal que f (D2 ) ⊂ C D2 = R1 ∪ R2 es el dominio de f 2 . Ana Rechtman Ejemplos de sistemas dinámicos caóticos 18 / 18