Examen de Sistemas Autom´ aticos (14/05/2014)
Anuncio
")
Examen de Sistemas Automáticos (14/05/2014)
Entregar UNA sola hoja / Contestar por orden / Etiquetar los apartados que se contestan
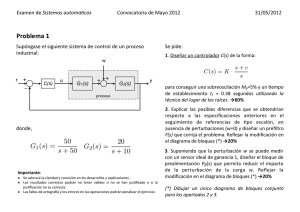
La pinza de robot mostrada en la figura se controla de tal forma que se cierra un ángulo θ usando el
sistema de control de motor de CC que se muestra en la parte derecha de la figura, en el que Km = 30,
Rf = 1, Kf = Ki = 1, J = 0,1 y b = 1. En las figuras 3 y 4, se muestran las funciones de sensibilidad
y los diagramas de bode de las funciones de lazo, para tres controladores C1 , C2 , C3 , con valores de
K = {5, 10, 15}, respectivamente. Se pide:
Obtener la respuesta ante una variación de tipo escalón unitario en la referencia: θd para el
controlador C2 (K = 10). Dibujarla indicando expresamente sobre ella los parámetros más
importantes.
Calcular, también para el controlador C2 , la variación en régimen permanente producida en la
salida θ debida a una perturbación de carga constante: Td (t) = A
Determinar para los tres controladores C1 , C2 , C3 , la amplitud de las variaciones en la posición
θ cuando se produce un par de carga pulsante: Td (t) = A cos(40t). Indicar también cuál muestra
una mayor acción de control.
Indicar cuál de los 4 sistemas muestra una estabilidad relativa mejor, explicando cómo se ha
obtenido la conclusión.
Los sistemas de control dados por C1 , C2 , C3 son muy oscilatorios. Bajando la ganancia, se
conseguirı́a una reducción de la oscilación y una mayor estabilidad, pero se perderı́a velocidad
de respuesta. Explicar esto a partir de la gráfica de Bodes. ¿Se podrı́a conseguir un sistema
menos oscilatorio sin perder la velocidad de respuesta?. Si fuera posible, explicar cómo.
Figura 1: Esquema de la pinza y del sistema de control.
Figura 2: Diagrama de bloques del sistema de control.
1
Examen de Sistemas Automáticos (14/05/2014)
Bode Diagram
Bode Diagram
20
20
10
0
Magnitude (dB)
Magnitude (dB)
10
0
−10
S1
−30
T1
T
2
2
−50
S3
−30
1
10
−20
−40
S
−20
−10
2
−60
1
10
3
10
Frequency (rad/s)
10
Bode Diagram
T3
2
3
10
Frequency (rad/s)
10
Bode Diagram
70
−20
−30
−40
Magnitude (dB)
Magnitude (dB)
60
50
40
Su1
−50
−60
−70
30
2
10
Frequency (rad/s)
Si2
−90
Su3
20
1
10
Si1
−80
Su2
−100
1
10
3
10
Si3
2
10
Frequency (rad/s)
3
10
Figura 3: Funciones de sensibilidad {S, T, Su , Si } para los controladores C1 , C2 , C3
Bode Diagram
60
50
Magnitude (dB)
40
30
20
10
0
−10
−20
Phase (deg)
−90
−135
L1
L2
L3
−180
0
10
1
10
Frequency (rad/s)
2
10
Figura 4: Diagramas de Bode de las funciones de lazo L1 , L2 , L3 , para los tres controladores.
2