301 - Capítulo 14: La Máquina Sincrónica en Régimen
Anuncio

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
14.1 Introducción
Las máquinas de corriente continua y de inducción tienen un amplio rango de
aplicaciones industriales tales como tracción, bombeo, control y otros. Sin embargo, la
operación del sistema eléctrico de potencia requiere la conversión de grandes
cantidades de energía primaria - petróleo, gas natural, agua, carbón, uranio -, en
energía y potencia eléctrica. La energía eléctrica puede ser transportada y convertida
en otras formas de energía en forma limpia y económica. La máquina sincrónica es
hoy por hoy, la más ampliamente utilizada para convertir grandes cantidades de
energía eléctrica y mecánica.
La máquina sincrónica es un convertidor electromecánico de energía con una
pieza giratoria denominada rotor o campo, cuya bobina se excita mediante la
inyección de una corriente continua, y una pieza fija denominada estator o armadura
por cuyas bobinas circula corriente alterna. Las corrientes alternas que circulan por
los enrollados del estator producen un campo magnético rotatorio que gira en el
entrehierro de la máquina con la frecuencia angular de las corrientes de armadura. El
rotor debe girar a la misma velocidad del campo magnético rotatorio producido en el
estator para que el torque eléctrico medio pueda ser diferente de cero. Si las
velocidades angulares del campo magnético rotatorio y del rotor de la máquina
sincrónica son diferentes, el torque eléctrico medio es nulo. Por esta razón a esta
máquina se la denomina sincrónica; el rotor gira mecánicamente a la misma
frecuencia del campo magnético rotatorio del estator durante la operación en régimen
permanente. La condición necesaria, pero no suficiente, para que el torque medio de
la máquina sea diferente de cero es:
w r = we
14.1
Aun cuando un gran porcentaje de máquinas sincrónicas son utilizadas como
generadores en las plantas de producción de energía eléctrica, debido
fundamentalmente al alto rendimiento que es posible alcanzar con estos convertidores
y a la posibilidad de controlar la tensión, en numerosas ocasiones se emplea
industrialmente como elemento motriz. Como otros convertidores electromecánicos, la
máquina sincrónica es completamente reversible y se incrementa día a día el número
de aplicaciones donde puede ser utilizada con grandes ventajas, especialmente
cuando se controla mediante fuentes electrónicas de frecuencia y tensión variable. El
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 301 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
principal inconveniente para su uso como motor es que no desarrolla torque de
arranque, pero si se incluye en el rotor de la máquina un devanado auxiliar de jaula de
ardilla, es posible obtener torque de aceleración como motor de inducción hasta una
velocidad cercana a la de sincronismo, y excitar en el momento apropiado la bobina
del campo, con la finalidad de sincronizar la máquina a la red mediante los torques
transitorios adicionales que se obtienen durante este proceso. Si la fuente de
alimentación puede reducir la frecuencia angular de las tensiones o corrientes de
armadura a valores muy bajos, la máquina es capaz de sincronizarse a esa red y
posteriormente ser acelerada a la par que se incrementa paulatinamente la frecuencia
de la fuente. Como la construcción de fuentes de gran potencia controladas en
frecuencia es hoy día factible mediante puentes inversores con interruptores estáticos,
es posible que en el futuro esta máquina incremente notablemente su importancia
como accionamiento industrial, e incluso desplace a las máquinas de corriente
continua.
Durante la operación de la máquina sincrónica en régimen permanente, la
velocidad mecánica del rotor es igual a la velocidad angular del campo magnético
rotatorio producido por el estator. En estas condiciones, sobre los conductores o
bobinas del campo no se induce fuerza electromotriz.
Para producir fuerza
magnetomotriz en el rotor es necesario inyectar corriente en esta bobina mediante una
fuente externa. De esta forma se obtienen dos campo magnéticos rotatorios que giran
a la misma velocidad, uno producido por el estator y otro por el rotor. Estos campos
interactuan produciendo torque eléctrico medio y se realiza el proceso de conversión
electromecánica de energía.
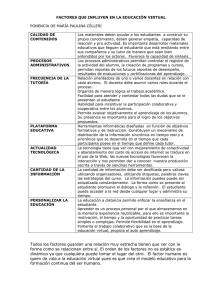
La bobina del rotor o campo de la máquina sincrónica se alimenta mediante la
inyección de corriente continua, como se mencionó anteriormente, con la finalidad de
producir un campo magnético de magnitud constante, semejante al de un imán
permanente, pero de una intensidad mucho mayor. Debido a que el rotor de la
máquina gira en régimen permanente a la velocidad sincrónica, el campo magnético
constante producido en este sistema se comporta, desde el punto de vista del estator,
como un campo magnético rotatorio. En la figura -193- se ha representado el
esquema básico de una máquina sincrónica trifásica.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 302 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
ia
a
va
q
Fr
d
vc
Fe
ic
c
if
vf
+
b
vb
ib
Esquema básico de una máquina sincrónica trifásica
Fig. -193-
La condición necesaria pero no suficiente, para la existencia de torque eléctrico
medio diferente de cero para un convertidor electromecánico genérico se desarrolló
ampliamente en el capítulo 6. Recordando la expresión 6.23, es necesario para
producir torque eléctrico medio en un convertidor electromecánco, satisfacer la
siguiente propiedad:
± m we ± n wr ± wm = 0
14.2
Si el rotor de la máquina se alimenta con corriente continua, la frecuencia wr es
cero y la condición necesaria para la existencia de torque medio se reduce a la
siguiente expresión:
wm = ± m we
14.3
La condición 14.3, válida para la máquina sincrónica, indica que con
velocidades angulares mecánicas múltiplos de la velocidad sincrónica, se pueden
obtener torques medios diferente de cero, tanto para valores negativos como positivos
de la velocidad. Para evaluar la magnitud del torque se puede recordar la expresión
6.46:
Te = k × Fe × Fr × sen d
donde:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 303 -
14.4
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
k
es una constante de proporcionalidad que depende de la
geometría de la máquina y de la disposición física de las bobinas.
Fe
es la amplitud de la distribución sinusoidal de la fuerza
magnetomotriz del estator.
Fr
es la amplitud de la distribución sinusoidal de la fuerza
magnetomotriz del rotor.
d
es el ángulo entre las amplitudes de las dos fuerzas
magnetomotrices, conocido generalmente como ángulo de carga.
Las fuerzas magnetomotrices del estator Fe, y del rotor Fr tienen una amplitud
constante, y para que en la expresión 14.4 el torque medio resulte constante, es
necesario que el ángulo d entre las dos fuerzas magnetomotrices no varíe en el tiempo
durante la operación en régimen permanente. Para lograr esto es necesario que las
dos fuerzas magnetomotrices giren a la misma velocidad angular.
Cuando la máquina sincrónica se encuentra desequilibrada, el campo
magnético rotatorio producido por las bobinas del estator es elíptico. Este campo se
puede descomponer en dos campos magnéticos rotatorios circulares de sentidos
contrarrotativos. Para que sea posible la producción de torque eléctrico medio en
estas condiciones, es necesario que la velocidad del rotor esté sincronizada con uno
de los dos campos magnéticos contrarrotativos. El campo que está fuera de
sincronismo y gira en el sentido contrario del rotor, produce torque eléctrico transitorio,
pero su valor medio es cero.
Cortocircuitando la bobina de campo en el rotor de la máquina sincrónica, es
posible en ciertos casos, acelerar el rotor como si fuera un motor de inducción con
rotor devanado. En el campo se inducen fuerzas electromotrices con la frecuencia del
deslizamiento cuando el campo magnético rotatorio del estator corta a los conductores
del campo. La fuerza electromotriz inducida en el rotor fuerza la circulación de
corrientes por este devanado. Aun cuando el torque eléctrico puede ser muy
reducido, en algunas ocasiones este método puede ser utilizado para arrancar en la
máquina sincrónica sin cargas mecánicas acopladas.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 304 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
14.2 Ecuaciones de la máquina sincrónica en coordenadas primitivas
Analizando el comportamiento de los ejes eléctricos de la máquina sincrónica
en el sistema de coordenadas correspondiente a las bobinas reales o físicas de la
máquina sincrónica, se satisface el siguiente sistema de ecuaciones:
é
ê
ë
v
é
ù
R
ùé
ù
i
é
e
ù
é
ùé
R
ù
i
abc,fúû = êë abc,fúû êë abc,fúû + êë abc,fúû = êë abc,fúû êë abc,fúû +
ù
d éê l
abc,fúû
ë
dt
14.5
En los sistemas lineales, la relación entre las corrientes que circulan por las
bobinas y los enlaces de flujo que las enlazan vienen dados por la relación:
él
ê abc,f (q,
ë
i)ùú = éê L
û
ë
abc,f
(q)ùú éê i
û ë
ù
abc,f úû
14.6
Sustituyendo esta relación en la expresión 14.5 se obtiene el resultado siguiente:
é
ê
ë
v
ù
abc,fúû =
éR
ùé
ù
ê abc,fú ê i abc,fú
ë
ûë
û
é
ù
+ êë L abc,fúû
ù
ù éi
ù
d éê i
dq d éê L
abc,fúû +
abc,fúû êë abc,fúû =
ë
ë
dt
dt dq
. ét
é
ùé
ù
é
ù
é
ù
ù
ù é
= êë Rabc,fúû êë iabc,fúû + êë L abc,fúû p êë iabc,fúû + q êë abc,fúû êë iabc,fúû
14.7
El sistema de ecuaciones diferenciales anterior representa el comportamiento
dinámico de las bobinas de la máquina sincrónica en coordenadas primitivas. Este
sistema se expresa en forma canónica como:
-1
-1
. ét
ù ù é
ù
é
ù
é
ù é éR
ù
é
ù
év
ù
p êë iabc,fúû = - êë Labc,fúû ê êë abc,fúû + q êë abc,fúû ú êë iabc,fúû + êë Labc,fúû êë abc,fúû
û
ë
14.8
La matriz de inductancia [Labc,f] depende de la posición relativa q del rotor con
respecto al estator, por esta razón la matriz de transición de estado también depende
de la posición angular del rotor. Si la velocidad de la máquina es constante, la
posición angular del rotor se determina de esta forma:
q = q o + wmt ;
si wm = cte.
14.9
La solución del sistema 14.8 puede obtenerse mediante métodos numéricos de
integración, utilizando algoritmos tales como Euler, Runge-Kutta ó predictor-corrector.
El principal inconveniente que se presenta es la necesidad de evaluar e invertir la
matriz de inductancias de la máquina en cada paso de integración, debido a la
dependencia de esta matriz con la posición angular del rotor. Los computadores
personales actuales son capaces de resolver este problema, sin embargo en el
pasado esto representaba grandes dificultades. Por este motivo durante varias
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 305 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
décadas se desarrollaron transformaciones de coordenadas que simplifican el
problema, aceleran notablemente los cálculos y permiten interpretar más fácilmente el
comportamiento dinámico y estático de la máquina sincrónica.
Durante los períodos transitorios, la velocidad angular de la máquina es variable
y la posición angular del rotor es una nueva variable de estado que debe ser evaluada
para conocer su dependencia temporal. En este caso es necesario incorporar una
ecuación adicional al sistema 14.8 para determinar el comportamiento dinámico del
eje mecánico de la máquina:
..
é
ù
J q = 1 êë i ab c,f úû
2
t
é
ê
ë
t
ù é
ab c,f úû
ù
ê i ab c,f ú
ë
û
.
- T me c - a q
14.10
Esta expresión representa el balance de torques en el eje del rotor. El torque
acelerante es igual al torque eléctrico del convertidor, menos el torque resistente
opuesto por la carga y por las pérdidas mecánicas. La ecuación diferencial 14.10
puede ser expresada mediante dos ecuaciones diferenciales de primer orden:
t
ù ét
ù
ù é
1 ( 1 éê i
ú ê abc,fú ê iabc,fú - T - a w )
abc,f
ë
û
û
ë
û
m
m
J 2ë
.
q = wm
.
wm =
14.11
donde:
J
Tm
es el momento de inercia del rotor
es el torque mecánico resistente, y
a
es el coeficiente de fricción dinámica
El sistema de seis ecuaciones diferenciales formado por las cuatro ecuaciones
del sistema 14.8, y las dos ecuaciones mecánicas representadas por la expresión
14.11, definen el comportamiento dinámico y transitorio completo de la máquina
sincrónica de la figura -193-. Este sistema de ecuaciones diferenciales es no lineal y
los coeficientes son variables en el tiempo, por este motivo es necesario recurrir a
técnicas numéricas para evaluar el comportamiento de la máquina o simplificar el
problema mediante la técnica de transformación de coordenadas.
En la matriz de inductancia de la máquina sincrónica, se encuentra toda la
información necesaria para determinar su comportamiento.
En la matriz de
inductancia se resume la información sobre la disposición geométrica de las bobinas,
sus acoplamientos, números de vueltas y reluctancias de los diferentes caminos
magnéticos. Una vez conocida la matriz de inductancias se puede evaluar la matriz de
torque por simple derivación con respecto a la posición angular del rotor. La matriz de
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 306 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
inductancias de la máquina sincrónica representada esquemáticamente en la figura 193- posee la siguiente estructura:
é
é
L (q)
ba
ê
Lee(q)] [Ler(q)]ù
é
[
=
=ê
ú êëLca(q)
Lre(q)] [Lrr(q)]
[
ë
û
ù é af ùù
L (q)
L (q)
bc ú ê bf ú
Lcc(q) û ëLcf(q) ûú
Laa(q) Lab(q) Lac(q)
é
(q) ùú
êL
ë abc,f
û
ë
é
ê
ë
L (q)
bb
L (q)
cb
L (q) L (q) L (q)ùú
fa
fb
fc
û
L (q)
é
ê
ë
L
ù
ú
ffû
û
14.12
donde:
subíndice referido a las bobinas del estator,
r
subíndice referido a las bobinas del rotor,
a,b,c subíndices de las tres bobinas físicas del estator,
f
subíndice de la bobina del campo del rotor.
e
Para evaluar cada una de las inductancias definidas en la expresión anterior, es
necesario recordar del capítulo 4 la siguiente definición:
L =N × N × P
kj
k
j
kj
14.13
donde:
Lkj
es la inductancia entre las bobinas k y j,
Nk
es el número de vueltas de la bobina k,
Nj
es el número de vueltas de la bobina j, y
P kj
es la permeanza del circuito magnético entre ambos devanados.
Cada una de las inductancias de la máquina sincrónica se puede representar
como una función del ángulo q. Esta función es periódica porque se repite
nuevamente cada vez que el rotor realiza un giro completo. Esta propiedad permite
expresar estas funciones mediante expansiones en series de Fourier en el ángulo q.
Si la pieza polar se diseña convenientemente - variando el entrehierro - es posible
representar las inductancias de la máquina con pocos términos de la serie. La
expresión de la matriz de inductancias más simple consiste en considerar términos
dependientes hasta en 2q para las inductancias propias del estator, y términos en q
para las inductancias mútuas estator-rotor.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 307 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
La inductancia propia del rotor Lff, es independiente de la posición del rotor,
debido a que el estator de la máquina es liso, si se desprecia el efecto de las ranuras:
2
L = N P = cte.
ff
f
f
14.14
El resto de las inductancias propias y mútuas depende de la posición angular, si
el rotor de la máquina es de polos salientes. Las permeanzas de los caminos
magnéticos de las bobinas del estator y de los acoplamientos estator-rotor son
dependientes de la posición angular q. Cuando la pieza polar del rotor se encuentra
alineada con una de las bobinas del estator, el camino magnético posee la máxima
permeanza. Si la pieza polar se encuentran en cuadratura con la bobina, el
entrehierro es muy grande y disminuye la permeanza. La variación de la permeanza
depende del ángulo 2q por que una bobina alineada con el polo norte del rotor, tiene el
mismo camino magnético cuando el alineamiento ocurre con el polo sur. Estas
inductancias se pueden representar aproximadamente mediante las siguientes
funciones:
L aa = L e + L'e cos2q
= Le + L'e cos2(q - 2 p )
bb
3
4
L cc= L e + L'e cos2(q - p )
3
'
L = Lee + L ee cos2(q + p )
ab
6
p
'
L ac= L ee + L ee cos2(q - )
6
p
'
L = Lee + L ee cos2(q - )
bc
2
L
14.15
En lo que se refiere a los acoplamientos mútuos estator rotor la situación es
diferente porque al girar el rotor 180°, la bobina del campo se encuentra con su
polaridad invertida. Las inductancias propias varían entre un valor máximo y un
mínimo, siempre positivo respecto a la posición angular del rotor. Sin embargo, los
acoplamientos mútuos estator-rotor varían desde un valor máximo positivo hasta un
valor máximo negativo, que en valor absoluto son idénticos, cuando el rotor de la
máquina gira 180°. Las inductancias mutuas estator-rotor pueden ser aproximadas
mediante las siguientes funciones:
L = Ler cosq
af
L = L cos(q - 2 p )
bf
bf
3
4
L = Lercos(q - p )
cf
3
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 308 -
14.16
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Con las consideraciones y aproximaciones anteriores, y recordando que en
coordenadas primitivas la inductancia mutuas son simétricas mientras que el medio
magnético sea isotrópico, es posible representar la matriz de inductancias de la
máquina sincrónica de polos salientes mediante la siguiente expresión aproximada:
L e rcosq
L ee +L 'ee cos2(q + p ) L ee +L 'ee cos2(q - p )
6
6
L ee +L 'ee cos2(q + p ) L +L ' cos2(q - 2 p ) L ee +L 'ee cos2(q - p ) L cos(q - 2 p )
e e
er
é
ù
6
2
3
3
ê L abc,fú =
ë
û
L ee +L 'ee cos2(q - p ) L ee +L 'ee cos2(q - p ) L +L ' cos2(q - 4 p ) L cos(q - 4 p )
e e
er
6
2
3
3
L rr
L ercosq
L ercos(q - 2 p )
L ercos(q - 4 p )
3
3
14.17
Si el rotor de la máquina sincrónica es liso, todas las inductancias propias y
mútuas del estator son independientes de la posición del rotor. En esta situación la
matriz de inductancias [Labc,f], se expresa de la siguiente forma:
é
ê
ë
ù
ú
û
L e +L 'e cos2 q
éL
ù
ê
ú=
abc,f
ë
û
é
ê
ë
Lercosq
ù
ú
û
Le
Lee
Lee
Lee
Le
Lee
Lercos(q-
2p
)
3
Lee
Lee
Le
Lercos(q-
4p
)
3
Lercosq L cos(q- 2p ) L cos(q- 4p )
er
er
3
3
Lrr
14.18
Aun para el caso de una máquina sincrónica de rotor liso, la solución del
sistema de ecuaciones diferenciales que determina el comportamiento de la máquina
sincrónica requiere el uso de métodos numéricos, debido a la dependencia de las
inductancias mútuas entre el estator y el campo, con la posición del rotor. La solución
analítica de este problema solamente se puede obtener mediante una transformación
del sistema de coordenadas. La transformación desde el sistema de coordenadas
primitivas a coordenadas dq0, discutida en el capítulo 7 durante el desarrollo de las
ecuaciones de la máquina generalizada, simplifica notablemente el problema
planteado.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 309 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
14.3 Transformación a coordenadas dq0
En la máquina sincrónica, el campo magnético rotatorio producido por las
fuerzas magnetomotrices de los devanados estatóricos, gira a la velocidad sincrónica
we. El rotor de la máquina también gira a la velocidad sincrónica. Por esta razón es
conveniente referir las ecuaciones diferenciales que definen el comportamiento de la
máquina a un sistema de coordenadas solidario con el rotor. De acuerdo con estos
lineamientos se definen los siguientes ejes magnéticos:
• Eje d: gira con respecto al estator a la velocidad del rotor, y en todo
momento se encuentra colineal con el eje magnético del campo eje f -.
• Eje q: gira con respecto al estator a la velocidad del rotor, y en todo
momento se encuentra en cuadratura con el eje magnético del
campo - eje f -.
• Eje 0: fijo en el estator y se encuentra desacoplado magnéticamente del
resto de los ejes de la máquina.
• Eje f:
es un eje solidario con el sistema rotórico colineal con el eje
magnético de la bobina de campo.
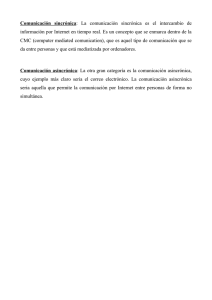
Aun cuando los ejes d y q giran a igual velocidad que el rotor, estos ejes
representan magnitudes del estator. El eje 0 es necesario para permitir que la
transformación de coordenadas sea bidireccional, es decir, se pueda transformar de
variables primitivas a variables dq0 y viceversa. El eje 0 tiene una estrecha relación
con las variables de secuencia cero de la transformación de componentes simétricas.
En la práctica este eje permite representar flujos de dispersión que no están
acoplados con otras bobina de la máquina. En la figura -194- se representa el sistema
de coordenadas dqo-f.
La matriz de transformación de coordenadas dq0-f a coordenadas primitivas se
define mediante la relación:
éi
ù
ê abc,fú
ë
û
= [A] êë idq0,fúû
é
ù
14.19
Si la transformación anterior se escoge de tal forma que la matriz [A] sea
hermitiana -inversa de la matriz igual a la traspuesta conjugada-, la transformación de
coordenadas es conservativa en potencia. Cuando la matriz es hermitiana y real, se
obtiene:
éi
ù
ê dq0,fú =
ë
û
*t é
é
ù
ù
[A] -1 êë iabc,fúû = [A] êë iabc,fúû
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 310 -
14.20
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
ia
a
lo
va
io
q = qo+ wmt
q
d
vo
f
vc
ic
if
vf
c
b
ib
vb
q
Sistema de coordenadas dq0-f de la máquina sincrónica
Fig.-194-
La matriz de transformación [A] se puede obtener multiplicando la
transformación de coordenadas primitivas a coordenadas ortogonales ab0 transformación de Clark-, por la transformación de coordenadas ab0 a coordenadas
dq0 - Capítulo 7 -:
1
1
0
ia
2
ia
éi ù
ê bú =
ëi c û
i
2
3
é
ê
ë
-1
2
3
2
-1 - 3
2
2
éia ù écosq
ê bú = êsenq
ëio û ë 0
1
2
1
2
0
i
b
io
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 311 -
14.21
i
é id ù
0ú ê qú
1û i
ë oû
-senq 0 ù
cosq
ùé ù
úê ú
ûë û
14.22
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
é ia ù
ê ib ú =
ë ic û
2
3
é
ê
ë
1
1
2
0
-1
2
1
2
3
2
1
2
-1 - 3
2
2
ùé
úê
ûë
é id ù
0ú ê iq ú
1û i
ë oû
cosq - senq 0ù
senq
cosq
0
0
14.23
Realizando el producto matricial indicado en la expresión anterior e
incorporando el eje f asociado con el sistema del rotor, que no se transforma, se
obtiene la matriz de transformación [A] de coordenadas primitivas
abc-f a
coordenadas dq0-f, también conocida en la literatura como transformación de Park:
[A] =
2
3
é
ê
ë
cosq
1
-senq
2
cos(q-
2p
2p
) -sen(q- )
3
3
1
cos(q-
4p
4p
) -sen(q- )
3
3
1
0
2
2
0
0
0
0
3
2
0
ù
ú
û
14.24
Trasponiendo la matriz [A] se obtiene la transformación de coordenadas
primitivas abc-f a coordenadas dq0-f:
éù
êú
ëû
i
d
iq
io
i
=
f
2
3
é
ê
ë
4
co s(q - p )
3
0
2p
4p
-senq -sen(q - ) -sen(q - )
3
3
0
co sq
1
2
0
2
co s(q - p )
3
1
2
1
2
0
ia
i
b
ic
0
3
2
0
ùé ù
úê ú
ûë û
i
f
14.25
Como la matriz de transformación es hermitiana, la transformación es invariante
en potencia:
t
é
év
ùù
ù é
ù
p(t) = vabc,fúû êë i abc,fúû = ê [A] êë dqo,fúû ú
ë
û
é
ê
ë
t
t
é
éi
ùù
ê [A ] êë dqo,f úû ú =
ë
û
t
t
ù
é
ù
é
ù é
ù
= vdqo,f úû [A] [A] êë i dqo,fúû = êë vdqo,fúû êë i dqo,fúû
é
ê
ë
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 312 -
14.26
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Aplicando la transformación 14.24, al sistema de ecuaciones 14.7, se obtiene:
é
ê
ë
. é
é éR
ù
éL
ù
ù ù é
ù
ù
G
i
dqo,fúû = ê êë dqo,fúû + êë dqo,fúû p + q êë dqo,fúû ú êë dqo,fúû
ë
û
v
14.27
donde:
té
ù
= [A] êë Rabc,fúû [A]
14.28
té
éL
ù
ù
ê
ú = [A] êL
ú
ë dqo,fû
ë abc,fû [A]
14.29
é
ù
êR
ú
ë dqo,fû
é
ù
êG
ú
dqo,f
ë
û
=
t
é
ê
ë
ù
dqo,fúû
é
ù
+ êë Hdqo,fúû
14.30
té
ét
ù
ù
ê
ú = [A] ê t
ú
ë dqo,fû
ë abc,fû [A]
H
é
ê
ë
t
] éê H
ù
dqo,fúû = [A
ë
ù
abc,fúû
14.31
d [ ]
A
dq
14.32
Por otra parte, la ecuación mecánica se expresa de la siguiente forma:
t
.
.
ù ét
ù
ù é
1 é
J q = êë idqo,fúû êë dqo,fúû êë idqo,fúû - Tm - a q
2
14.33
Evaluando explícitamente las matrices 14.28 a 14.32, y sustituyendo el
resultado en las expresiones 14.27 y 14.33 se obtiene:
é ùé
ê úê
ë ûë
Re+L p
v
d
vq
=
vo
v
f
..
d
.
qL
.
-qL
dq
0
L p
df
.
qL
ùé ù
úê ú
ûë û
Re+ Lq p
0
0
0
Ro+ Lo p
0
L p
0
0
R +L p
qd
fd
qf
f
i
d
iq
io
f
.
i
f
14.34
.
J q = Te - Tm - a q = L iq i + (L - L ) i iq - Tm - a q
qf
f
qd dq d
14.35
En un sistema trifásico sin neutro no circula corriente de secuencia cero, pero
cuando las tres corrientes de fase encuentran un camino de retorno, es necesario
considerar esta componente. La componente de secuencia cero representa la
circulación de corrientes iguales y en fase por las bobinas de la máquina. Estas
corrientes no producen magnetización debido a que la suma de las fuerzas
magnetomotrices de las tres bobinas es cero. Sin embargo, los flujos de dispersión si
poseen componente de secuencia cero. En el modelo de la máquina no existe
acoplamiento magnético de esta secuencia con el resto de las bobinas. Esta
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 313 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
componente no puede producir torque eléctrico, pero influye en las pérdidas de la
máquina y en las fuerzas electromotrices sobre las bobinas.
En la expresión 14.34 no aparecen fuerzas electromotrices de generación sobre
la bobina de campo. Esto se debe a que el sistema de coordenadas dqo es solidario
al eje f del campo. Los flujos de las bobinas d y q no cruzan tangencialmente a los
conductores del campo. Sin embargo, en este eje pueden aparecer fuerzas
electromotrices por transformación, debido a que el flujo de la bobina del eje directo
atraviesa el devanado de campo. Por el contrario, el eje cuadratura no puede producir
ningún efecto sobre el campo debido a que se encuentra permanentemente en una
posición ortogonal.
La máquina sincrónica puede ser representada mediante un modelo físico en
coordenadas dqo-f, similar al obtenido en el capítulo 7 para la máquina generalizada.
En la figura -195- se presenta el modelo en coordenadas dq0-f que satisface las
ecuaciones 14.34 y 14.35. En la máquina real, las corrientes id e iq no circulan por
ningún devanado físico, para determinar las corrientes reales es necesario aplicar la
transformación inversa de coordenadas dqo-f a coordenadas primitivas.
a
q = qo+ wmt
q
d
lo
f
io
vq
id
if
vf
iq
q
vd
Modelo en coordenadas dqo-f de la máquina sincrónica
Fig. -195Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 314 -
vo
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
id
Fd
Eje d
id
Capa de corriente y fuerza magnetomotriz de la bobina
Fig. -196-
Cada pareja de escobillas separa las capas de corriente de las bobinas
equivalentes. La fuerza electromotriz de todos los conductores que forman cada una
de las bobina se obtiene en bornes de las escobillas. Cuando por un par de escobillas
se inyecta una corriente, esta circula entrando a los conductores a la derecha del eje
que define la posición de estas escobillas, y saliendo en los conductores a la
izquierda. Esta configuración produce una fuerza magnetomotriz orientada en el eje
de las escobillas tal como se muestra en la figura -196-.
Las fuerzas electromotrices de generación que aparecen sobre los conductores
se recolectan en los circuitos que se encuentra en cuadratura con el flujo que las
producen. En la figura -197- se representa este detalle. El campo y la bobina del eje
d producen generación sobre la bobina del eje q, y la bobina del eje q produce
generación sobre el eje d, pero sobre la bobina de campo no se produce generación,
tal como se mencionó anteriormente, por que este devanado no es cortado por el flujo
de los demás ejes. En el sistema de referencia utilizado, las fuerzas electromotrices
de generación aparecen adelantadas 90° con respecto a los flujos que las producen.
Si en las bobinas primitivas se inyecta un sistema balanceado de corrientes trifásicas,
se obtienen las siguientes corrientes en el sistema de coordenadas dqo:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 315 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
i
éi ù
ê qú =
ë io û
d
2
3
é
ê
ë
cos q
cos(q - 2p )
3
cos(q - 4p )
3
ùé
úê
ûë
2p
4p
-sen q -se n(q - ) -se n(q - )
3
3
1
2
1
2
= 3
1
2
ù
2 I cos(wt+a- 2p )ú =
3
2 I cos(wt+a - 4p )û
3
2 I cos(wt+a)
é cos(q - wt - a ) ù
I ê- sen(q - wt - a )ú
ë
û
0
14.36
Eje d
E =vxB
w
yq
e
Eje q
d gen.
iq
Fuerza electromotriz de generación producida por flujos en cuadratura
Fig. -197-
Si la posición angular q del rotor se sincroniza con la variación angular de las
corrientes wt en la expresión 14.36, las corrientes en las coordenadas dq0 son
independientes del tiempo. En esta condición, los términos que dependen de las
derivadas de las corrientes se anulan. Corrientes constantes en el tiempo en este
sistema de coordenadas, producen fuerzas magnetomotrices constantes en las
bobinas dqo equivalentes. Como la transformación está sincronizada con la velocidad
angular de las corrientes durante el régimen permanente, el campo magnético
producido por las bobinas d y q gira con la misma velocidad, obteniéndose de esta
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 316 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
forma, el mismo campo magnético rotatorio de la máquina sincrónica en coordenadas
primitivas, excitada mediante un sistema trifásico balanceado de corrientes.
a
q
q = qo+ wmt
fd
d
Fd
fT
FT
fq
Fq
q
Producción del torque de reluctancia en la máquina sincrónica de polos salientes
Fig. -198-
El torque electromagnético de la máquina está determinado por la interacción
entre las fuerzas magnetomotrices no alineadas.
Por una parte la fuerza
magnetomotriz del campo produce torque al interactuar con el flujo de la bobina que
representa al eje q. La fuerza magnetomotriz del eje d produce torque en su
interacción con la fuerza magnetomotriz del enrollado cuadratura. Exactamente igual
pero con sentido contrario, la fuerza magnetomotriz del eje q produce torque con la
fuerza magnetomotriz del eje d. Si la reluctancia de los caminos magnéticos d y q son
iguales, estos dos torques se anulan. Cuando la reluctancia del eje d es menor que la
del eje q, el torque que produce la fuerza magnetomotriz del eje d sobre el eje q es
mayor que en la dirección contraria y se produce un torque neto resultante debido a la
variación de reluctancia entre los dos ejes. Desde otro punto de vista se puede
interpretar que la pieza polar intenta alinearse con la fuerza electromotriz resultante en
la máquina. Si la máquina posee un rotor cilíndrico, este torque es nulo. En la
ecuación 14.35 se describe el comportamiento dinámico de la máquina, el torque
eléctrico se divide en dos componentes, la primera es proporcional al producto de la
corriente de campo if por la corriente de la bobina q iq, y la segunda componente
depende del producto de las corrientes id e iq. Esta última componente se anula si la
inductancia Lqd es igual a la inductancia Ldq. La inductancia Lqd está definida por la
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 317 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
permeanza o reluctancia del eje directo, mientras que la inductancia Ldq está definida
por la permeanza del eje cuadratura.
En la figura -198- se muestran las fuerzas magnetomotrices y los flujos de la
máquina sincrónica en coordenadas dq0. Se observa que el flujo total no se
encuentra en la misma dirección de la fuerza magnetomotriz total debido a que el eje
directo posee menor reluctancia y amplifica el flujo en esta dirección. El desfasaje
existente entre el flujo y la fuerza magnetomotriz produce el torque de reluctancia. En
una máquina de rotor liso la fuerza magnetomotriz y el flujo resultante tienen la misma
dirección y el torque de reluctancia es cero.
Cuando se analizan las fuerzas electromotrices de generación en el sistema de
ecuaciones 14.34 se observan dos términos similares, el primero depende de la
inductancia Ldq, que es proporcional a la permeanza del camino cuadratura y
determina la generación sobre el eje directo, el segundo término depende de Lqd, y es
proporcional a la permeanza del camino directo y determina parte de la generación
sobre el eje cuadratura. En general se tiene que:
e
.
d gen.
=-qL
eq
.
.
.
2
i = - q Ne fq = - q Ne Pq iq @ -q Lq iq
dq q
.
gen. id
=qL
.
2
14.37
.
i = q Ne P i @ q L i
qd d
d d
d d
14.38
En las dos expresiones anteriores, la aproximación consiste en despreciar el
flujo de dispersión asociado con las inductancias Lq y Ld, respectivamente. El tercer y
último término de generación del sistema 14.34, representa la fuerza electromotriz
generada en el eje cuadratura por la corriente del campo if. El flujo se produce en la
dirección del eje de campo, que coincide con la dirección del eje directo. Como estos
dos ejes poseen la misma permeanza, se obtiene que:
eq
.
gen. if
=qL
.
.
i = q Ne N P i = q L i
qf f
f f f
df f
14.39
Los términos de transformación Ldf y Lfd son iguales debido a que la permeanza
está definida para el mismo camino magnético y el medio es isotrópico. Como
resumen se puede indicar las siguientes relaciones entre las inductancias propias y
mútuas de la máquina sincrónica de polos salientes en coordenadas dqo-f:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 318 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
L
L
L
L
dq
@ Lq
qd
@ L
= L
qf
= L
df
d
df
fd
14.40
Las ecuaciones 14.34 y 14.35 pueden ser escritas en función de los enlaces de
flujo de cada una de las bobinas de la máquina. Los enlaces de flujo de estas bobinas
en función de las corrientes en coordenadas dqo-f se expresan de la siguiente forma:
l =L i +L
d
d d
l
q
i
df f
14.41
= L q iq
14.42
l
= L o io
o
l =L i +L i
f
f f
14.43
df d
14.44
Las cuatro relaciones anteriores se pueden representar en una forma más
compacta mediante la matriz de inductancia [Ldqof]:
é ù
ê ú
ë û
l
[l] =
d
lq
lo
l
= [L ] [i] =
f
é
ê
ë
L
L
d
0
0
0
Lq
0
0
0
0
Lo
0
0
0
L
L
df
df
f
ùé ù
úê ú
ûë û
i
d
iq
io
i
f
14.45
Reemplazando las expresiones 14.41 a 14.44 en las ecuaciones 14.34 y 14.35
se obtiene el siguiente sistema de ecuaciones, como representación de la máquina
sincrónica en función de los enlaces de flujo en el sistema de coordenadas dqo-f:
.
v = Re i + p l - q l q
d
d
d
.
v q = Re i q + p l q + q l
d
v o = Ro i o + p l o
v =R i +pl
f
f f
f
Te = l iq - lq i
d
d
14.46
14.47
14.48
14.49
14.50
Las corrientes id, iq, io e if de las ecuaciones 14.46 a 14.50 se obtienen a partir
de los enlaces de flujo ld, lq, lo y lf, invirtiendo la matriz de inductancias en el
sistema de coordenadas dqo-f, que se ha indicado en la expresión 14.45.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 319 -
La
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
representación de las ecuaciones de la máquina utilizando enlaces de flujo como
variables de estado, además de compactar las expresiones algebraicas, resulta de
gran utilidad, debido principalmente a que durante los procesos transitorios, los
enlaces de flujo se mantienen constantes entre el instante antes y después de una
perturbación. De esta forma se simplifica el cálculo de las condiciones iniciales del
modelo.
Expresando en forma canónica, las ecuaciones de tensión de la máquina
sincrónica en coordenadas dqo-f, y utilizando los enlaces de flujo como variables de
estado, se obtiene el siguiente resultado:
éù é
êú ê
ëû ë
l
Re
0
0
0
lq
0
Re
0
0
0
0
Ro 0
0
0
0
d
p
lo
l
f
=-
R
f
ùé
úê
ûë
L
-1
L
d
0
0
0
Lq
0
0
Lo
0
0
0
L
0
L
df
df
0
f
ùé ù é ùé ù
úê ú ê úê ú
ûë û ë ûë û
l
d
lq
lo
.
-q
l
f
- lq
v
l
vq
d
d
+
0
vo
0
v
f
14.51
14.4 Régimen permanente de la máquina sincrónica
Para analizar el comportamiento de la máquina sincrónica en régimen
permanente es necesario excitar los circuitos de armadura con un sistema equilibrado
y simétrico de corrientes. Además, en estas condiciones el rotor de la máquina debe
girar a la velocidad sincrónica. La posición relativa del rotor con respecto al sistema
de referencia solidario al es:
q = wt + q o
14.52
Sustituyendo la expresión 14.52, en la transformación a coordenadas dqo 14.36, se
obtiene el siguiente resultado:
é id ù
ê iq ú =
ë io û
é cos (q o- a) ù
3 I ê - sen (q o - a)ú
ë 0 û
14.53
Las corrientes de régimen permanente en coordenadas primitivas,
transformadas al sistema de coordenadas dq0 son independientes del tiempo. El
argumento de las funciones trigonométricas (qo-a) proyecta la fuerza magnetomotriz
producida por el sistema balanceado de corrientes primitivas según las direcciones de
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 320 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
los nuevos ejes coordenados. En la figura -199- se representa el efecto de la
transformación para un sistema en régimen permanente y equilibrado. Como las
corrientes id, iq e io son independientes del tiempo, los términos de transformación son
nulos en el nuevo sistema de coordenadas y en estas condiciones. La expresión
14.34 se reducen a:
v = Re i - w L iq
d
d
dq
14.54
vq = Re iq + w L i + w L i
qd d
qf f
14.55
v =R i
f
f f
14.56
a
qo
t=0
Fd
d
N id
a
w
FT
Ca mpo
Mag né ti co
Ro tatorio
N iq
Fq
q
Transformación de la Fuerza Magnetomotriz Rotatoria a coordenadas dqo
Fig. -199-
Definiendo las relaciones siguientes:
e =wL
f
x =wL
d
i =wL
qf f
qd
xq = w L
dq
i
df f
@ wL
d
@ w Lq
14.54
14.55
14.56
e introduciendolas en las expresiones 14.54 a 14.56, se obtiene el sistema de
ecuaciones:
v = Re i - xq iq
d
d
14.60
vq = Re iq + x i + e
d d
f
14.61
v =R i
f
f f
14.62
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 321 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
14.5 Diagrama fasorial de la máquina sincrónica
Mediante la transformación inversa de Park 14.24 se puede obtener la tensión
de la fase a:
1
2
× vo )
( co s q × v - se n q × vq +
d
3
2
v a (t) =
14.63
La tensión de secuencia cero vo es nula debido a que no existe corriente de secuencia
cero en el sistema trifásico balanceado. Por otra parte, la transformación de
coordenadas gira a velocidad sincrónica según se describe en la expresión 14.52. En
estas condiciones se determina la tensión en bornes de la fase "a" de la máquina
como:
2
2
va(t) =
cos (wt+q o ) × v sen (wt+q o ) × vq =
d
3
3
= Re [
j (w t+qo)
2
+j
v e
3 d
= Re [ ( 2 V + j 2 Vq ) e
d
j (w t+qo)
2
]=
vq e
3
j (w t+qo)
] = Re [ 2 V a e
j (w t+qo)
]
14.64
De acuerdo con esta expresión, el fasor que representa el valor efectivo de la tensión
de la fase “a” de la máquina sincrónica en régimen permanente es:
V a = V + V q = V + j Vq =
d
d
1
1
v +j
vq
d
3
3
14.65
Con un razonamiento similar se obtiene la siguiente expresión para las
corrientes en régimen permanente:
1
1
I a = I + I q = I + j Iq =
i +j
iq
d
d
d
3
3
14.66
Reemplazando las definiciones 14.65 y 14.66 en las ecuaciones 14.60 y 14.61,
se obtienen las expresiones fasoriales siguientes:
V
d
= Re I + j x q I q
d
V q = Re I q + j x I + j
d d
14.67
1
e = Re I q + j x I + E
d d
f
3 f
V a = V + V q = Re I a + j x I + j xq I q + E
d
d d
f
14.68
14.69
En estas expresiones, los fasores con subíndice d están orientados según la
dirección del eje directo, y los fasores con subíndice q, apuntan en la dirección del eje
cuadratura. El fasor Ef se orienta en la dirección del eje q debido a que representa la
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 322 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
fuerza electromotriz producida por la corriente del campo sobre el eje q. En la
ecuación 14.68 se observa que el fasor Ef se obtiene multiplicando por j -dirección del
eje q- la fuerza electromotriz ef producida por el campo, y dividiendo este resultado por
el factor 3 . Todas las magnitudes de los fasores de las expresiones anteriores se
han definido en términos de valores efectivos, por esta razón no aparece en la
definición de cada uno de los términos el coeficiente 2 . En la ecuación fasorial 14.69
aparecen los términos jxd.Id y jxq.Iq, aun cuando tienen la apariencia de representar
caídas de tensión reactivas, en realidad representan fuerzas electromotrices de
generación. Es necesario recordar que el operador imaginario j, produce una rotación
de 90°. Como el fasor xd.Id está dirigido según el eje directo, el fasor j.xd.Id se orienta
según la dirección del eje cuadratura. En otras palabras, el flujo producido por la
bobina del eje directo de la máquina, corta a los conductores fijos del estator e induce
fuerza electromotriz de generación en el eje cuadratura. De forma semejante el
término xq.Iq representa un fasor con dirección q, j.xq.Iq rota 90° y el fasor resultante
apunta en la dirección negativa del eje directo. En la figura -200- se representa el
diagrama fasorial de la máquina sincrónica en régimen permanente.
Ef
w
Va
Vd
jxqIq
Iq
R eI q
R eI d
Vq
j xdI d
j
Eje q
R eI a
Id
q o- a
Ia
V =R I +jx I +jx I +E
a
ea
qq
dd
f
Ej e d
Diagrama fasorial de la máquina sincrónica de polos salientes
Fig. -200-
Si el rotor de la máquina sincrónica es liso, las reactancias directa y cuadratura
son iguales, en este caso se define una sola reactancia denominada reactancia
sincrónica xs. Para la máquina sincrónica de rotor liso la ecuación fasorial 14.69 se
simplifica cuando se agrupan los términos de generación:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 323 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
V a= Re I a+ j xsI + j xsI q + E = ( Re + j xs ) I a + E
d
f
f
14.70
En la figura -201- se representa el diagrama fasorial de la máquina sincrónica
de rotor liso correspondiente a la ecuación 14.70.
w
Va
j xsI a
Vd
ReI q
Ef
Iq
j
Vq
ReI d
Eje q
ReI a
Id
q o- a
Ia
V a= ReI a+ j x I + E
s a
f
Eje d
Diagrama fasorial de la máquina sincrónica de rotor liso
Fig. -201-
Las ecuaciones anteriores están escritas en la convención motor. En otras
palabras, las corrientes que circulan por las bobinas de la máquina entran por su
punto de polaridad relativa. En la convención motor una potencia positiva indica que
la máquina consume potencia eléctrica. Si la potencia es negativa, la máquina genera
potencia eléctrica. Las máquinas sincrónicas son utilizadas con mucha frecuencia
como generadores y es ventajoso en estos casos utilizar la convención generador en
lugar de la convención motor para describir su comportamiento. En la convención
generador las corrientes de armadura salen por el punto de polaridad de cada bobina.
En ambas convenciones, la dirección de referencia de la corriente de campo se define
entrando por el punto de polaridad relativa por que este eje eléctrico es pasivo y en
general consume potencia eléctrica. El cambio de convención se realiza invirtiendo el
sentido de circulación de las corrientes de los ejes directo y cuadratura, para este fin
se cambia el signo de las corrientes Ia, Id e Iq, en las ecuaciones 11.67, 11.68 y 11.69.
La fuerza electromotriz que produce el campo no cambia de signo en la nueva
convención, debido a que la corriente de campo if mantiene la misma referencia en las
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 324 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
dos convenciones. De esta forma, las ecuaciones de la máquina sincrónica de polos
salientes, en régimen permanente y en convención generador son:
V = - Re I - j xq I q
d
d
V q = - Re I q - j x I + E
d d
14.71
f
14.72
E = V a + Re I a + j x I + j xq I q
f
d d
14.73
donde:
V a = V + V q = V + j Vq =
d
d
f
Iq
A
Va
- fa
D
Ef
14.76
j (xd - xq ) I d
E
jxqI d
d
jxqI q
Vz = jxq Ia
eje q
j
jxqI q
ReI a
Ia
Id
14.75
1
1
e =j
wL i
f
df f
3
3
B
Vq
Vd
14.74
1
( i + j iq )
d
3
I a = I + I q = I + j Iq =
d
d
E =j
1
( v + j vq )
d
3
F
jxdI d
C
eje d
Diagrama fasorial de la máquina sincrónica de polos salientes en la convención generador
Fig. -202-
En la figura -202- el triángulo DABC es semejante al triángulo D D EF , por esta
razón se pueden establecer la siguiente relación:
jx I
EF = DF Þ V z = q q Þ V = j x I
z
q a
Ia
Iq
AC AB
14.77
La tensión Vz, aun cuando no posee una interpretación física concreta, es una
herramienta muy útil en la construcción del diagrama fasorial de la máquina sincrónica
de polos salientes. Cuando se suma fasorialmente la tensión de armadura en bornes
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 325 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
de la máquina Va, la caída resistiva ReIa en el circuito de armadura y el fasor Vz, el
fasor resultante está orientado en la dirección del eje cuadratura tal como se observa
en la figura-202-. Conociendo la posición del eje cuadratura de la máquina, es posible
proyectar la corriente Ia en sus dos componentes, Id e Iq. Conocido el fasor Id se
determina la fuerza electromotriz producida por el campo, sumando el término j(xdxq)Id al extremo del fasor que representa la tensión Vz en el diagrama fasorial.
Expresando matemáticamente el planteamiento anterior, se tiene:
AE = D Ð d = V a + Re I a + j xq I a
14.78
é - Re Ia sen fa + xq Ia cos fa ù
d = tg ê V + R I cos f + x I sen f ú
a
q a
aû
ë a e a
-1
D=
2
14.79
2
(Va+Re Iacosfa+ xq Iasenfa) + (xq Iacosfa- Re Iasenfa)
ï
ï
ï
I
ï
ï
d ï = Id =
| I a| sen (fa+ d)
E = AE + j (x - xq ) I = D Ð d + j (x - xq ) I
f
d
d
d
d
14.80
14.81
14.82
E = D + (x - xq ) I = D + (x - xq ) Ia sen (fa+ d)
f
d
d
d
14.83
Mediante las expresiones anteriores se determina el diagrama fasorial de la
máquina sincrónica de polos salientes, conocida la resistencia del estator Re, las
reactancias directa xd y cuadratura xq, la tensión de armadura Va, la corriente de
armadura Ia , y el ángulo del factor de potencia en el punto de operación fa.
14.6 Potencia y torque eléctrico de la máquina sincrónica
Para calcular del torque eléctrico se puede utilizar la expresión general 14.50.
Sin embargo, las variables independientes de esta ecuación son ficticias. Por esta
razón es conveniente expresar el torque y la potencia eléctrica mediante variables
asociadas con el diagrama fasorial. Las máquinas sincrónicas tienen rendimientos
muy altos, particularmente cuando son de gran potencia. En una máquina sincrónica
típica, la potencia mecánica en el eje es prácticamente igual a la potencia eléctrica en
bornes de la máquina.
Empleando esta aproximación es posible desarrollar
expresiones del torque y de la potencia eléctrica dependientes de variables medibles
en la práctica. Con estas condiciones se tiene:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 326 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Pm = Tm× wm @ Pe = Te × w
p
14.84
La potencia eléctrica se determina de la siguiente forma:
é
ù
Pe (t) = êë ia ib icúû
é vaù
ê vbú =
ë vc û
é
ê
ë
i
d
iq io ùúû
évdù
êvqú
ëvoû
14.85
En régimen permanente equilibrado, las corrientes y las tensiones en
coordenadas transformadas son independientes del tiempo. La corriente y la tensión
de secuencia cero son nulas. La potencia eléctrica se calcula como:
Pe (t) = i v + iq vq = 3 I 3 V + 3 Iq 3 Vq = 3 (I V + Iq Vq )
d d
d
d
d d
14.86
Despreciando la caída de tensión en la resistencia Re en el diagrama fasorial
representado en la figura -200-, se deducen las siguientes relaciones:
Va cos d + x I = E Þ I =
d d
f
d
Va sen d = xq Iq Þ Iq =
E - Va cos d
f
x
d
Va sen d
xq
V = Va sen d
d
14.87
14.88
14.89
Vq = Va cos d
14.90
Reemplazando las ecuaciones 14.87 a 14.90 en la expresión 14.86 se obtiene
el siguiente resultado:
E Va
(x - xq ) 2
Va sen 2 d
Pe = 3 xf
sen d + 3 d
2
x
x
d
q
d
14.91
El segundo término de la expresión anterior depende de la diferencia entre las
reactancia del eje directo y cuadratura. En otras palabras, depende de la variación de
reluctancia del circuito magnético.
El primer término depende de la fuerza
electromotriz Ef producida por la corriente de campo. En una máquina de rotor liso,
esta es el único término de la potencia eléctrica que interviene en el proceso de
conversión de energía. El torque eléctrico se calcula dividiendo la expresión 14.91 por
la velocidad angular sincrónica mecánica wm = w/p, donde p es el número de pares de
polos de la máquina. El ángulo d se denomina ángulo de carga de la máquina y
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 327 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
representa la diferencia de fase entre la fuerza electromotriz producida por el flujo del
campo y la tensión de armadura. El ángulo de carga define el estado o punto de
operación de la máquina, es análogo a la variable deslizamiento en el caso de la
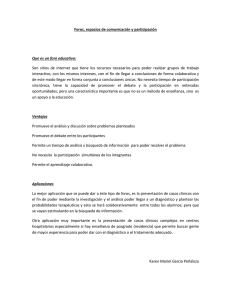
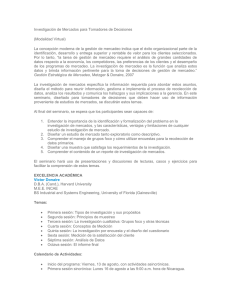
máquina de inducción. En la figura -203- se presenta el gráfico potencia eléctrica con
respecto al ángulo de carga para una máquina sincrónica típica, indicando las dos
componentes de la potencia eléctrica y la potencia eléctrica total.
Potenc ia s in
reluct ancia
Pe
Potencia de
reluctancia
Pe < 0
M otor
Potencia
eléctrica
0
-p
- p/2
p/2
d
p
Pe > 0
Generador
Potencia eléctrica de la máquina sincrónica de polos salientes
Fig. -203-
La potencia aparente en el estator de la máquina sincrónica se calcula de la
siguiente forma:
S a = 3 ( V a × I *a ) = 3 ( V + j Vq ) ( I - j Iq ) =
d
d
= 3 [ (V I + Vq Iq ) + j ( Vq I - V Iq ) ] = Pe + j Qe
d d
d
d
14.92
La ecuación anterior determina la potencia activa y reactiva de la máquina
sincrónica. La potencia reactiva expresada en función de las variables del diagrama
fasorial se obtiene reemplazando en la expresión 14.91, las relaciones 14.87 a 14.90:
2
E Va
V
Qe = 3 ( Vq I - V Iq ) = 3 xf
cos d - 3 x ax (xq cos2 d+x sen2 d)
d
d
d
q
d
d
14.93
En la figura -204- se representa la potencia reactiva en función del ángulo de
carga para una máquina sincrónica típica de polos salientes.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 328 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Q
Potencia
reactiva
reluctancia
Qr
-p/2
p/2
0
Potencia
reactiva
total
d
Potencia
reactiva
campo
Qf
Q = Qf - Qr
Potencia reactiva en función del ángulo de carga para una máquina sincrónica de polos saliente
Fig. -204-
El punto de operación de la máquina sincrónica queda definido al conocer el
valor del ángulo de carga d. En la figura -205- se observa que a medida que cuando
aumenta la potencia entregada por la máquina al sistema eléctrico, se incrementa el
valor del ángulo de carga. Sin embargo, la característica potencia eléctrica en función
del ángulo de carga tiene un valor de potencia máxima que puede entregar la
máquina. Si por el sistema mecánico se entrega una potencia mayor, no es posible
realizar la conversión de toda la potencia, y el exceso o diferencia acelerará el rotor.
Si el rotor de la máquina se acelera, el ángulo de carga aumentará continuamente y la
máquina perderá el sincronismo con el sistema eléctrico de potencia. Cuando ocurre
este fenómeno es necesario desconectar la máquina sincrónica de la red para evitar
las fuertes oscilaciones de potencia y la aceleración de la máquina que es capaz de
alcanzar el nivel de embalamiento del rotor.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 329 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Pe
Pmax
Pe < 0
Motor
- dmax
-p
Pe2
Pm2
Pe1
Pm1
p/2
0
dmax
d1 d2
- p/2
p
d
Pe > 0
Generador
-Pmax
Variación de la potencia eléctrica con el ángulo de carga y punto de máxima potencia
Fig. -205-
Para determinar el ángulo de carga correspondiente a la máxima potencia que
puede entregar la máquina, se deriva con respecto a este ángulo la expresión 14.91.
En el valor dmax la derivada de la potencia con respecto al ángulo de carga es nula:
E Va
(x -xq ) 2
= xf
cos d + xd x Va cos 2d
¶d
d
d q
¶Pe
¶Pe
¶d
E Va
f
(dmax) = x
d
(x - xq ) 2
cos dmax + xd x Va cos 2dmax = 0
q
d
14.94
14.95
Recordando la identidad trigonométrica:
2
cos 2a º 2 cos a -1
14.96
Se puede expresar la ecuación 14.92 como una ecuación cuadrática:
2 (x - xq ) 2
E Va
(x - xq ) 2
d
2
f
d
V
cos
d
+
cos
d
a
max
max
x xq
x
x xq Va = 0
d
d
d
14.97
Simplificando la expresión anterior se obtiene la ecuación:
E
xq
f
cos2 dmax + 1
cosdmax - 1 = 0
2 (x - xq ) Va
2
d
Cuya solución es:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 330 -
14.98
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
é
-1
dmax = cos ê
ë
1
16
x2q
(x - xq)
d
E
2
xq
E
f
+1 -1
2 V
2
4 (x - xq ) Va
a
f
d
ù
ú
û
14.99
Para las máquinas sincrónicas de rotor liso, las reactancias directa y cuadratura
son iguales, y en este caso se obtiene a partir de la expresión 14.95:
dmax = cos
-1
p
(0) = Þ Pe
=
2
max
E Va
f
xs
; si x = xq = xs
d
14.97
14.7 Convenciones de la máquina sincrónica
En la sección 14.5 se desarrolló el diagrama fasorial de la máquina sincrónica
para las convenciones motor y generador respectivamente. Estas dos convenciones
se diferencian tan solo en la referencia de circulación de las corrientes de armadura.
En la convención generador, potencia positiva implica flujo de energía desde el
sistema mecánico hacia el sistema eléctrico de potencia. En la convención motor,
potencia positiva significa que la máquina absorbe potencia de la red y la entrega por
el eje mecánico. En ambos casos la potencia se calcula mediante la misma expresión
fasorial:
S = V × I * = V. I . cos f + j V . I . sen f
14.101
donde f es el ángulo de atraso de la corriente con respecto a la tensión. Esta
expresión define como referencia la potencia reactiva inductiva. Si la corriente está
retrasada fasorialmente con respecto a la tensión, al ser conjugada, el término
imaginario es positivo.
De esta forma quedan completamente definidos, con respecto a la potencia
activa y reactiva, los cuatro cuadrantes en que puede localizarse la corriente de
armadura de la máquina sincrónica en las dos convenciones más utilizadas. En la
figura -206- se resumen los aspectos y definiciones más resaltantes de las dos
convenciones.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 331 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
I
Im
II
Motor
Capacitivo
P<0
Q< 0
Ia
Motor
Capacitivo
Generador
Capacitivo
P <0
Q< 0
P>0
Q <0
Ia
I
Im
II
Generador
Capacitivo
Ia
P> 0
Q <0
Ia
Va Re
P< 0
Q >0
Ia
Ia
Motor
Inductivo
Condensador
Sincrónico
III
Va Re
P<0
Q>0
P >0
- fa Q > 0
P> 0
Ia
Generador
Inductivo
Generador
Inductivo
IV
III
Convención Generador
- fa Q > 0
Ia
Inductor
Sincrónico
Motor
Inductivo
IV
Convención Motor
Convenciones generador y motor de la máquina sincrónica
Fig.-206eje q
Ef
j(xd-xq)I d
j xq I a
d
Va
E = V a+ j xq I a + j (x - xq) I
d
f
d
Convención Generador
Id
Ia
Id
Ia
eje q
Ef
- j(xd-xq)I d
eje d
- j xq I a
d
Va
E = V a- j xq I a - j (x - xq) I
d
f
d
Convención Motor
eje d
Diagramas fasoriales de la máquina en las dos convenciones para el mismo punto de operación
Fig. -207-
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 332 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
En la convención generador, un generador inductivo entrega potencia reactiva a
la red y un generador capacitivo la consume. Un motor inductivo en convención motor
consume potencia reactiva inductiva. La convención define el sentido de referencia
del intercambio. Siempre se utiliza el concepto de potencia reactiva inductiva, para
mantener la coherencia de la definición 14.101. En la figura -207- se presentan los
diagrama fasoriales de una máquina sincrónica de polos salientes, en convención
generador y en convención motor, cuando se encuentra generando hacia la red
potencia activa y reactiva inductiva. Se observa en estos dos diagramas, que aun
cuando la corriente se invierte de sentido, las caídas de tensión producidas por la
corriente de armadura también cambian y los diagramas fasoriales en las dos
convenciones reproducen los mismos resultados.
14.8 Valores nominales de la máquina sincrónica
Al igual que en los transformadores, en las máquinas de corriente continua y en
las de inducción, la máquina sincrónica posee un conjunto de valores nominales o
datos de placa que determinan sus límites de operación en régimen permanente. Los
valores nominales están definidos por los límites térmicos del convertidor. Si estos
límites de temperatura se exceden durante períodos prolongados de tiempo, se
produce un rápido envejecimiento del aislamiento de la máquina y un daño prematuro
de la misma. Los datos de placa de las máquinas sincrónicas son los siguientes:
• La corriente nominal de armadura:
Esta corriente está determinada por las pérdidas Joule de las bobinas del
estator, y por las características térmicas de la máquina. Las características físicas y
químicas de los materiales utilizados en el aislamiento de los devanados de armadura,
definen la máxima temperatura de operación que permiten estos materiales sin que se
produzca una degradación prematura de los mismos. El sistema de intercambio de
calor juega un papel importante porque a medida que aumenta la capacidad de
extracción de calor, es posible incrementar las pérdidas sin aumentar la temperatura
máxima de las bobinas. El fabricante define durante la etapa de diseño, y
posteriormente en el banco de pruebas, el valor máximo de la corriente de armadura
que no excede la temperatura máxima del aislamiento con el sistema de refrigeración
utilizado por la máquina. Durante la operación de la máquina este valor puede ser
excedido un cierto tiempo, aun cuando la operación por encima de la corriente nominal
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 333 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
de armadura durante periodos prolongados de tiempo o en régimen permanente,
reduce la vida útil de la máquina.
• La tensión nominal de armadura:
La tensión nominal de la máquina está determinada por las pérdidas en el
material magnético de la máquina. Las pérdidas por histéresis y por corrientes
parásitas dependen de la densidad de flujo máximo en el hierro. La tensión aplicada a
las bobinas es aproximadamente igual a la fuerza electromotriz en el devanado
cuando se desprecian las pérdidas resistivas. La fuerza electromotriz en las bobinas
es igual a la derivada con respecto al tiempo de los enlaces de flujo. Para
excitaciones sinusoidales de las bobinas de la máquina se obtiene a partir de la ley de
Faraday la siguiente expresión:
Va @ Ea = 2 p f Na fmax = 4.44 f Na A . Bmax
14.102
Como en la expresión anterior, la frecuencia f, el número de vueltas de la
bobina Na, y el área A de la sección transversal de la bobina son constantes, la
densidad de flujo máximo depende directamente de la tensión de armadura. Por esta
razón el fabricante define un valor nominal de la tensión de armadura que permite
utilizar una densidad de flujo cercana al codo de saturación del material magnético,
donde las pérdidas del hierro son reducidas. En la práctica las densidades de flujo de
diseño se encuentran entre 1.0 y 1.4 Wb/m2 para los materiales ferromagnéticos de
grano no orientado utilizados en la construcción de las máquinas eléctricas rotativas.
• La potencia aparente nominal:
La potencia aparente nominal no define en si misma un límite térmico de la
máquina, pero resume en un valor de mérito la corriente y tensión nominal de
armadura. En el sistema trifásico balanceado, la potencia aparente nominal es:
l-n
S n = 3 Vn
l
l-l
l
× In = 3 Vn × In
14.103
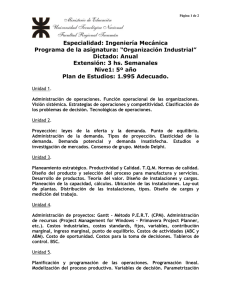
La máquina sincrónica puede operar con potencia aparente nominal en infinitos
puntos, con diferentes ángulos de desfasaje entre la tensión y la corriente de
armadura. En la figura -208- se representan los diagramas fasoriales de la máquina
para dos factores de potencia notables: unitario y cero inductivo. En el segundo caso
se observa que es necesaria una fuerza electromotriz mayor.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 334 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Ef
P = Sn
Q= 0
Ef
j xq I a
j(xd-xq)I d
Va
Ia
j xq I a
j xd I d
Va
Ia
co s f = 1
Va = V n
Ia = In
j xq Ia
j(xd-xq)Id
P= 0
Q = Sn
cos f = 0
Inductivo
Operación de la máquina con potencia aparente nominal con f.p. unitario y puramente inductivo
Fig. -208-
• El factor de potencia nominal:
En la figura -208- se observa que para mantener un factor de potencia inductivo
es necesaria una mayor fuerza electromotriz producida por el flujo del campo de la
máquina sincrónica. La fuerza electromotriz depende directamente de la corriente if
que circula por la bobina del campo. Aun cuando esta bobina maneja una pequeña
fracción de la potencia aparente nominal de armadura, las pérdidas resistivas del
conductor producen calentamiento local en la misma. Por esta razón es necesario
imponer un valor de corriente de campo que garantice el funcionamiento en régimen
permanente de la máquina sincrónica sin envejecer prematuramente el aislamiento de
esta bobina. Como la corriente de campo está limitada a un valor máximo en régimen
permanente, también queda limitada la máxima fuerza electromotriz producida por la
corriente de campo. A medida que se reduce el factor de potencia de la máquina
durante la operación a potencia aparente nominal, se incrementa la fuerza
electromotriz necesaria para mantener el punto de operación. El factor de potencia
para el cual la fuerza electromotriz producida por el campo es máxima se define como
factor de potencia nominal. El fabricante en lugar de expresar el valor máximo de la
corriente de campo, marca en los datos de placa el valor del factor de potencia
nominal, que es el mínimo factor de potencia con el cual la máquina puede operar con
tensión y corriente nominal sin exceder la temperatura máxima de las bobinas del
campo.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 335 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
j xq I q
E f max
j xq I a
j xd I d
Va
Ia
Va = V n
Ia = In
fn
Máquina sincrónica de polos salientes en el punto nominal de operación
Fig. -209-
• La corriente de campo nominal:
La corriente de campo nominal es aquella que produce la tensión nominal en la
armadura de la máquina sincrónica cuando esta se encuentra en vacío y girando a la
velocidad nominal. Esta corriente es inferior a la corriente máxima del campo definida
por el factor de potencia nominal en las condiciones nominales de operación.
• La velocidad nominal:
El rotor de la máquina sincrónica gira en régimen permanente a una velocidad
mecánica exactamente igual a la velocidad angular del campo magnético rotatorio del
estator. Esta velocidad depende de la frecuencia de la red eléctrica y del número de
pares de polos p de la máquina. La velocidad nominal de la máquina sincrónica es:
2p f
wn = w = p
sin
14.104
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 336 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
14.9 Lugares geométricos de la máquina sincrónica
Las posibles condiciones de operación de la máquina sincrónica circunscriben
las diferentes variables que definen su comportamiento, en ciertos rangos y figuras
geométricas cuando se representan gráficamente.
Un determinado punto de
operación queda definido mediante un diagrama fasorial, pero la variación del factor
de potencia, genera un lugar geométrico para la fuerza electromotriz producida por el
campo. El análisis de estos diagramas permite evaluar las diferentes posibilidades y
limitaciones en la operación de la máquina sincrónica. Algunos diagramas o lugares
geométricos son suministrados por el fabricante de la máquina debido a su utilidad e
importancia. En otros ocasiones es necesario construirlos a partir de la información
disponible. Todos los lugares geométricos analizados en esta sección mantienen
constante la tensión de armadura.
En las máquinas sincrónicas grandes, la potencia mecánica en el eje es
aproximadamente igual a la potencia eléctrica. Por esta razón, si la potencia
mecánica se mantiene constante, la potencia eléctrica es independiente de la
intensidad de la corriente del campo. El lugar geométrico de la corriente de armadura
cuando la máquina opera a potencia eléctrica y tensión de armadura constante, es
una línea recta paralela al eje imaginario. En la figura -210- se ilustra este lugar
geométrico.
Lugar geométrico
de la corriente a
potencia constante
j
Ia cos fa
Ia
fa
Va
Re
P = cte.
Va = cte.
Lugar geométrico de la corriente del estator a potencia activa constante
Fig. -210-
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 337 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Si para cada uno de los puntos del lugar geométrico de la corriente de
armadura a potencia constante se realiza el diagrama fasorial de la máquina
sincrónica de rotor liso, el extremo del fasor que representa la fuerza electromotriz
producida por el campo es una línea recta paralela al eje real, tal como se observa en
la figura -211-.
j
Lugar geométrico de la
fuerza electromotriz a
potencia constante
Ia cos fa
Ef
jxs Ia
d
Va
fa
fa
xsI a cos fa = cte.
Re
P = cte.
Va = cte.
Ia
Lugar geométrico
de la corriente a
potencia constante
Lugar geométrico de la fuerza electromotriz producida por el campo, a potencia constante, para una
máquina sincrónica de rotor liso
Fig. -211-
En la figura -212- se observa, durante la operación a potencia eléctrica
constante, que cuando la proyección de la fuerza electromotriz producida por el campo
sobre la tensión de armadura es mayor que esta, la máquina entrega potencia reactiva
inductiva a la red eléctrica. Si la proyección de la fuerza electromotriz sobre la tensión
de armadura es menor que la tensión de armadura, la máquina consume potencia
reactiva inductiva de la red eléctrica. Cuando la proyección de la fuerza electromotriz
producida por el campo iguala a la tensión de armadura, la máquina se encuentra
operando con factor de potencia unitario y no consume, ni produce, potencia reactiva
inductiva. En la máquina sincrónica de polos salientes la situación es mucho más
compleja, pero proyecciones grandes de la fuerza electromotriz sobre la tensión
tienden a inyectar reactivos a la red, y en el caso contrario consumen reactivos del
sistema eléctrico de potencia.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 338 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
j
Ia co s fa
cap.
inductivo
ca paci ti vo
E f3
E f2
E f1
I a3
jxsIa3
I a2
c os f =1
jxsI a2
jxs Ia1
Re
Va
P = cte.
Va = cte.
I a1
ind.
Zona Inductiva y capacitiva del lugar geométrico de la fuerza electromotriz a potencia constante
Fig. -212-
Cuando la tensión y el módulo de la corriente de armadura se mantienen
constantes, y se permite la variación del ángulo del factor de potencia, los lugares
geométricos de la fuerza electromotriz que produce el campo y de la potencia
aparente de la máquina sincrónica de rotor liso son círculos. El círculo de la potencia
aparente está centrado en el origen de coordenadas del diagrama fasorial, y el centro
del círculo correspondiente al lugar geométrico de la fuerza electromotriz producida
por la corriente de campo con corriente de armadura nominal, se encuentra en el
extremo del fasor que representa la tensión de armadura. La fuerza electromotriz que
produce el campo de la máquina sincrónica se encuentra limitada por la máxima
corriente de campo, este valor se obtiene en la condición de operación nominal de la
máquina. Por esta razón existe un círculo que representa la fuerza electromotriz
máxima que intercepta al lugar geométrico de la fuerza electromotriz a corriente
nominal de armadura. En la figura -213- se representa el círculo correspondiente a la
corriente nominal de armadura, el lugar geométrico asociado con la fuerza
electromotriz, y el círculo correspondiente a la fuerza electromotriz máxima. La zona
de operación posible, en régimen permanente, está definido por el área de la
intersección de los lugares geométricos de la fuerza electromotriz máxima y de la
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 339 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
fuerza electromotris a corriente nominal. Fuera de la intersección se excede la
corriente nominal de armadura, la corriente máxima de campo o ambas corrientes.
Como la fuerza electromotriz máxima está limitada por la corriente de campo, esto se
traduce en un limitación adicional sobre la corriente de armadura. En una máquina
sincrónica de rotor liso se cumple la siguiente relación:
ï
E
Va
E = V a + j xs I a Þ I a = j x - j x f Þ
f
s
s
| I a| Š ïï j (
Va - E
fmax
xs
Ðd ï
)ï
ï
14.105
j
V
j xa
s
Ef m ax
p u nto d el
cos fn
E
Ef m ax
fmax
xs
jxsIa
Van
I an
lími te té rm ico d e
la co rr ien te Ia
p un to d el
co s fn
Zo na de op er ació n
factib le
lími te térm ico d e la cor rie nte i f
Lugares geométricos de la corriente y de la fuerza electromotriz a potencia aparente constante para la
máquina sincrónica de rotor liso
Fig. -213-
En ocasiones, al diagrama de la figura -213- se le incorporan varios límites
adicionales. Por una parte los análisis de estabilidad del sistema de potencia definen
unos límites máximos a los ángulos de carga de cada una de las máquinas sincrónicas
de la red, esto se traduce en una limitación sobre las fuerzas electromotrices y
corrientes de la máquina. También es posible que la turbina de accionamiento o la
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 340 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
carga mecánica estén limitadas a la potencia del punto nominal de operación. Esto
también define una limitación sobre las fuerzas electromotrices y corrientes tal como
se discutió anteriormente al anlizar los lugares geométricos a potencia constante.
j
- dmax
j
Va
xs
dma x
dma x
Ef m ax
pu n to del
cos fn
E
+P n
Ef ma x
fmax
xs
jxsIa
Van
I an
lími te té rm ico d e
la co rr ien te Ia
-P n
-Pn
+P n
pun to del
co s fn
- dma x
Lugares geométricos de la fuerza electromotriz y la corriente por limitaciones de estabilidad en la red, y
por los límites de potencia de accionamiento o carga
Fig. -214-
En la figura -214- se presentan los principales lugares geométricos y
limitaciones en la operación de la máquina sincrónica de rotor liso. En algunas
ocasiones es necesario definir también la fuerza electromotriz mínima Efmin, calculada
como aquella que produce la potencia eléctrica nominal con el ángulo de carga
correspondiente a la máxima potencia que puede entregar la máquina en régimen
permanente. Esto se representa mediante un círculo centrado en el origen de
coordenadas del diagrama fasorial. En la máquina de rotor liso la fuerza electromotriz
mínima es:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 341 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
E
Pe = Pn =
f
min
. Va
xs
P .x
sen p Þ E = n s
f
2
Va
min
14.106
En la máquina sincrónica de polos salientes los lugares geométricos son más
complicados. La figura -215- presenta el lugar geométrico de la fuerza electromotriz
de una máquina sincrónica con polos salientes, el círculo correspondiente a la
potencia aparente nominal, y el círculo correspondiente a la fuerza electromotriz
máxima.
j
cos fn = 0.8 ind.
x = 1.2 p.u.
xdq = 0.8 p.u.
2
punto
nominal
Efmax
1
Va
0
-1
Re
S = Sn
Ef a S n
-2
-2
-1
0
1
2
Lugares geométricos de una máquina sincrónica de polos saliente
Fig. -215-
El gráfico de la figura anterior se obtiene mediante el programa MATLAB que se lista a
continuación:
% Lugares Geométricos de la Máquina Sincrónica de Polos Salientes
Van = 1.;
Ian = 1.;
San = 1.;
CosFin = 0.8;
Xd = 1.2;
Xq = 0.8;
Re = 0.0;
Fi = 0:-.05:-2*pi;
% Tensión nominal
% Corriente nominal
% Potencia aparente nominal
% Factor de potencia nominal
% Reactancia del eje directo
% Reactancia del eje cuadratura
% Resistencia de las bobinas de armadura
% Vector de posibles factores de
% potencia de operación
Ia = Ian*(cos(Fi)+j*sin(Fi));
% Vector de corrientes de
% armadura
D = Van + (Re+j*Xq).*Ia;
% Vector de fasores D para cada
% corriente
delta = atan2(imag(D),real(D));
% Vector de ángulos de carga
% para cada corriente de
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 342 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
% armadura
Id = Ian*sin(delta-Fi).*(sin(delta)-j*cos(delta));
% Cálculo de la
% corriente del
% eje directo
Ef = D + j*(Xd-Xq).*Id;
% Cálculo de la fuerza
% electromotriz
Fin = acos(CosFin);
%
%
%
%
%
Angulo del factor de potencia
nominal
Iax = Ian*(cos(Fin)-j*sin(Fin));
Fasor de la Corriente nominal
Dx = Van + (Re+j*Xq)*Iax;
Fasor D para la condición
nominal
deltax = atan (imag(Dx)/real(Dx));
% Angulo de carga nominal
Idx = Ian*sin(deltax-Fin).*(sin(deltax)-j*cos(deltax));
% Corriente
% directa nominal
Efx = Dx + j*(Xd-Xq).*Idx;
% Fasor de la fuerza
% electromotriz máxima
Efmax = abs(Efx)*(cos(Fi)+j*sin(Fi)); % Magnitud de la fuerza
% electromotriz máxima
axis('square');
%
axis([-2.5 2.5 -2.5 2.5]); %
plot (Ef),hold on;
%
%
plot (Ia);
%
%
plot(Efmax), hold off;
%
%
Definición de ejes cuadrados para el gráfico
Escalas del gráfico en p.u.
Lugar geométrico de la fuerza electromotriz
a potencia aparente constante
Lugar geométrico de la potencia aparente
constante
Lugar geométrico de la fuerza electromotriz
máxima
14.10 Circuito equivalente de la máquina sincrónica
A partir de la expresión 14.34 que define el comportamiento dinámico de las
corrientes de la máquina sincrónica en convención motor, y recordando las
definiciones y aproximaciones indicadas en 14.40 se puede modelar la máquina
mediante cuatro circuitos eléctricos acoplados por términos de generación y
transformación, mediante transformadores y fuentes de tensión dependientes de
corriente. En la figura -216- se presenta el circuito equivalente de la máquina
sincrónica de polos salientes.
Durante la operación equilibrada en régimen permanente, las corrientes id, iq e if
son constantes en el tiempo, y la corriente io es nula. De esta forma, el circuito
desacoplado correspondiente a la secuencia cero no tiene influencia, y las
inductancias del resto de los circuitos no producen caída de tensión. La corriente del
campo se puede calcular evaluando el cociente entre la tensión aplicada al campo y la
resistencia de esta bobina. Los dos circuitos restantes, correspondientes al eje directo
y cuadratura, están configurados tan sólo mediante resistencias y fuentes de tensión
dependientes de corrientes que circulan por otros circuitos. Asociando con el eje real
la polaridad positiva de la corriente y tensión del circuito correspondiente al eje directo,
y con el eje imaginario la del circuito cuadratura, se representa en la figura -217- el
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 343 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
circuito equivalente fasorial de la máquina sincrónica de polos salientes en régimen
permanente equilibrado.
i
iq
d
Re
Re
wL i
wL q i q
L
vq
wL i
d
dd
Lq
d
i
L df
L
R
df f
v
io
f
f
Ro
v
f
Lo
f
vo
Circuito equivalente de la máquina sincrónica de polos salientes en convención motor
Fig. -216-
Re
j xq Iq
I
d
j Iq
Re
V
jE =j
wL i
f
d
df f
3
j Vq
jx I
dd
Circuitos equivalentes de la máquina sincrónica de polos salientes en régimen permanente
Fig. -217-
Si la máquina sincrónica es de rotor liso, las reactancias del eje directo y del eje
Para
cuadratura son iguales, y se denomina entonces reactancia sincrónica xs.
máquinas sincrónicas de rotor liso se deduce de la figura -217-, y de las expresiones
14.65 y 14.66, la siguiente ecuación:
V a = V + j Vq = ( Re + j xs ) ( I + j Iq ) + j E = ( Re + j xs ) I a + E
d
d
f
f
14.107
En la figura -218- se presenta el circuito equivalente en convención motor, de la
máquina sincrónica de rotor liso en régimen permanente equilibrado.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 344 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
j xs
jE =E
f
Re
f
I
a
V
a
Circuito equivalente de la máquina sincrónica de rotor liso en régimen permanente equilibrado
Fig. -218-
El circuito equivalente de la máquina sincrónica de rotor liso permite una
interpretación simple de las ecuaciones. Esta máquina se comporta como una fuente
equivalente de Thèvenin, cuya tensión de circuito abierto es la fuerza electromotriz
que produce la corriente de campo sobre la armadura, y la impedancia de Thèvenin
está formada por la resistencia de las bobinas de armadura y por la reactancia
sincrónica. La caída reactiva modela la desmagnetización ocasionada por la
circulación de la corriente de armadura.
14.11 Curvas en “V” de la máquina sincrónica
Estas curvas están formadas por una familia de gráficos que representan la
relación entre la magnitud de la corriente del estator Ia, y la corriente de campo o
corriente de excitación If, utilizando como parámetro diferentes valores de la potencia
eléctrica. Estos gráficos se realizan manteniendo la tensión de armadura en un valor
constante, generalmente en su valor nominal. Mediante el diagrama fasorial de la
máquina sincrónica se pueden obtener directamente las curvas en “V” de la máquina
sincrónica.
En la figura -219- se han representado una familia de curvas en “V” para una
máquina sincrónica de polos salientes. Es interesante destacar la linealidad de la
curva cuando la potencia eléctrica es cero. En este caso todas las caídas de tensión y
fuerzas electromotrices coinciden exactamente con el eje cuadratura, obteniéndose
una relación entre la fuerza electromotriz y la corriente de armadura es lineal. La zona
a la derecha del gráfico corresponde a inyección de reactivos desde la máquina hacia
la red y a la izquierda de la característica de factor de potencia unitario, se consume
potencia reactiva inductiva desde la red eléctrica.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 345 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
| Ia|
E
1.4
d
Va
n
1.2
fmax
x = 0.9 p.u.
P=1.2
x q = 0.6 p.u.
Ia
x
punto
nominal
P=1.
n
d
cos f = 1
1
P=.8
0.8
P=.6
P=.4
0.6
P=.2
0.4
Q< 0
P=0
Q >0
0.2
Ef, if
0
0
0.2
0.4
0.6
0.8
1
E = Va
1.2
1.4
1.6
1.8
2
f
n
Curvas en “V” para una máquina sincrónica de polos salientes
Fig. -219-
Las curvas en “V” fueron utilizadas en el pasado con la finalidad de evitar los
laboriosos cálculos fasoriales. Estas curvas permiten una rápida visualización de los
límites operativos de la máquina. Sin embargo, actualmente no es necesario el uso de
esta herramienta debido a las facilidades de cálculo disponibles. A continuación se
lista un programa en el entorno MATLAB que reproduce el gráfico de la figura -219-.
El algoritmo utiliza la rutina 'fsolve' incorporada en el entorno de programación, para
determinar el valor del ángulo de carga en cada punto de operación. El listado de este
programa reproduce algunos aspectos prácticos del cálculo de máquinas sincrónicas
en régimen permanente:
% Curvas en V de
global c1 Ef Van
Van = 1.;
Ian = 1.;
San = 1.;
CosFin = 0.8;
xd = 0.9;
xq = 0.6;
Re = 0.0;
la Máquina Sincrónica de Polos Salientes
xd xq Pe;
% Tensión nominal
% Corriente nominal
% Potencia aparente nominal
% Factor de potencia nominal
% Reactancia del eje directo
% Reactancia del eje cuadratura
% Resistencia de las bobinas de armadura
Fin = acos(CosFin);
% Angulo del factor de potencia nominal
Iax = Ian*(cos(Fin)-j*sin(Fin));
% Fasor de la Corriente nominal
Dx = Van + (Re+j*xq)*Iax;
% Fasor D para la condición nominal
deltax = atan (imag(Dx)/real(Dx));
% Angulo de carga nominal
Idx = Ian*sin(deltax-Fin).*(sin(deltax)-j*cos(deltax)); % Corriente directa nominal
Efx = Dx + j*(xd-xq).*Idx;
% Fasor de la fuerza electromotriz máxima
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 346 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Efmax = abs(Efx)*(cos(Fin)+j*sin(Fin));
% Magnitud de la fuerza
%electromotriz máxima
% Rango de fuerzas electromotrices
Ef=0.1:.01:2.0;
kk=0
for Pe=0:.2:1.2;
% Rango de potencias eléctricas
kk=kk+1
for l=1:length(Ef);
delta(l)=0;
% Inicialización del ángulo de carga
end
for c1=1:1:length(Ef);
aaa=Pe*xd/(Ef(c1)*Van);
if abs(aaa) < 1.0,
deltac1 = asin(aaa);
% Estimación inicial del ángulo de carga
deltac1 = fsolve2('Pdelta',deltac1(1)); % Solución de la ecuación
% no lineal
% Cálculo de la potencia reactiva
Q=Ef(c1)*Van.*cos(deltac1)/xdVan^2*(xq*cos(deltac1).^2+xd*sin(deltac1).^2)/(xd*xq); S=sqrt(Pe*Pe+Q.*Q);
% Cálculo de la potencia aparente
Ia(c1,kk) = S/Van; % Cálculo de la corriente de armadura
else
Ia(c1,kk) = 0;
% Corriente de armadura en casos no factibles
end
end
end
% Gráfico de las curvas en "V"
axis([0 2 0 1.5]);
% Definición de los ejes del gráfico
plot(Ef,Ia(:,1),'.',Ef,Ia(:,2),'.',Ef,Ia(:,3),'.',Ef,Ia(:,4),'.',Ef,Ia(:,5),'.',Ef,
Ia(:,6),'.',Ef,Ia(:,7),'.'),hold on; plot(abs(Efmax),0.0,'x'),hold off;
%
Fuerza electromotriz máxima.
function p = Pdelta(delta)
p = Ef(c1)*Van*sin(delta)/xd+Van^2*(xd-xq)*sin(2*delta)/(2*xd*xq)-Pe;
14.12 Medición de las reactancias permanentes de la máquina sincrónica
Existen diversos métodos para medir las reactancias de régimen permanente
de la máquina sincrónica de rotor liso y de polos salientes. Los métodos para
determinar la reactancia sincrónica de las máquinas de rotor liso y la reactancia del eje
directo de la máquina de polos salientes son similares. En estas medidas se acciona
la máquina a la velocidad sincrónica, supliendo solamente las pérdidas mecánicas.
En estas condiciones la máquina entrega o consume potencia reactiva inductiva
dependiendo de la fuerza electromotriz que produce el campo. Como la corriente de
armadura se encuentra 90° retrasada o adelantada con respecto a la tensión de
armadura, la caída en la reactancia xq es paralela a esta tensión. El eje cuadratura
está ubicado en la dirección del fasor de la tensión de armadura. La corriente del eje
directo es igual a la corriente de armadura y la caída de tensión que produce esta
componente de la corriente también está dirigida según el eje cuadratura. En la figura
-220- se muestra la situación planteada.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 347 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
E = jE
f
f
D = D Ð d = D Ð 0°
Va
Ia = I
eje q
j xq I a
j (x - xq ) I
d
d
j
j x I = j x Ia
d d
d
d
cos f = 0
P=0
Q>0
eje d
Determinación de la reactancia del eje directo del diagrama fasorial de la máquina sincrónica
Fig. -220-
Del diagrama fasorial de la figura -220- se deduce la siguiente expresión:
E = Va + x Ia , si cos f = 0
f
d
Þ x =
d
E - Va
f
Ia
14.108
Uno de los métodos de medida consiste en anular la fuerza electromotriz
producida por el campo reduciendo paulatinamente la corriente de campo a cero, en
ese momento se obtiene a partir de la expresión 14.108 la reactancia del eje directo
de la máquina como el cociente entre la tensión y la corriente de armadura. Otro de
los método se fundamenta en la misma expresión, pero determina la fuerza
electromotriz Ef, desconectando la armadura y midiendo la tensión en bornes que
coincide exactamente con la fuerza electromotriz cuando la máquina está en vacío.
Este método se puede simplificar aun más si la máquina se encuentra previamente en
cortocircuito girando a velocidad sincrónica, con una corriente de campo tal que fuerce
la circulación de la corriente nominal por la armadura. Si en este preciso momento,
se desconecta la armadura de la máquina, la tensión en bornes es igual a la fuerza
electromotriz interna durante el cortocircuito y el cociente con la corriente nominal de
armadura determina la reactancia del eje directo de la máquina.
La discusión anterior es válida también para las máquinas sincrónicas de rotor
liso. La reactancia del eje directo es igual a la reactancia del eje cuadratura, y si se
aplican los mismos ensayos utilizados para la determinación de la reactancia del eje
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 348 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
directo, se puede obtener con el mismo procedimiento el valor de la reactancia
sincrónica de una máquina de rotor liso.
La reactancia del eje cuadratura se puede determinar a partir de la medición de
un punto de operación si se conocen todas las variables y parámetros de la máquina.
Conocida la potencia, tensión, fuerza electromotriz, ángulo de carga y reactancia del
eje directo, es relativamente simple obtener el valor de la reactancia cuadratura de la
máquina a partir de la expresión 14.91:
x
xq =
2
2
Va
sen 2d
d
( x Pe - E Va sen d ) + 1
d
f
14.109
Otro método que permite determinar la reactancia del eje cuadratura de la
máquina consiste en medir la variación de reluctancia cuando se gira el rotor 90°
eléctricos. La reluctancia mínima corresponde a la reactancia del eje directo y la
reluctancia máxima al eje cuadratura. Como las dos bobinas poseen el mismo
número de vueltas se puede determinar la reactancia cuadratura a partir de esta
información y del valor de la reactancia del eje directo.
Es necesario recordar que las reactancias del eje directo y cuadratura de la
máquina sincrónica representan términos de generación, están asociadas con los
flujos de la armadura de la máquina y por tanto se asemejan más a reactancias de
magnetización que a reactancias de dispersión de una bobina. En la práctica las
reactancias sincrónicas de las máquinas de rotor liso y las reactancias del eje directo
de las máquinas de polos salientes se encuentran en un rango que oscila entre 0.8 y
1.2 p.u. de las bases propias del convertidor. Las reactancias del eje cuadratura estan
comprendida normalmente entre 0.5 y 0.7 p.u. aproximadamente. En algunas
máquinas especiales, tal como es el caso del los motores sincrónicos de reluctancia,
sucede el caso particular de que la reactancia del eje cuadratura es mayor que la
reactancia del eje directo.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 349 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
14.13 Análisis de la máquina sincrónica considerando la saturación
Cuando el material magnético de la máquina se satura, la relación entre la
corriente del campo if y el flujo que esta corriente produce ff, no es lineal. La
característica de la fuerza electromotriz Ef producida por el flujo del campo tampoco es
lineal con respecto a la corriente de campo. La función Ef(if) se conoce como
característica de excitación en vacío e indica la variación de las permeanzas del
material magnético con el nivel de fuerza magnetomotriz aplicada al campo de la
máquina. Las máquinas sincrónicas operan normalmente en puntos ubicados por
encima del codo de saturación y es necesaria una técnica que permita analizar su
comportamiento en estas condiciones. El nivel de saturación de una máquina afecta
las permeanzas del circuito magnético y por tanto las reactancias de la misma. La
característica de magnetización o curva de vacío suministra la información necesaria
para corregir las reactancias de la máquina en cada punto de operación.
Las reactancias de la máquina sincrónica representan, como se ha mencionado
anteriormente, términos de generación. Sin embargo, asociada en serie con cada una
de estas reactancias existe una pequeña reactancia que modela el flujo de dispersión
de la bobina física. Las reactancias de dispersión están definidas por caminos
magnéticos que se cierran en el aire, y por esta razón no están sometidas a procesos
de saturación. Es conveniente por este motivo, separar en dos partes cada una de las
reactancias de la máquina sincrónica, una que representa el camino de fuga y la otra
que representa el camino principal o de magnetización. La reactancia de fuga no
sufre los efectos de la saturación del material ferromagnético, pero la reactancia de
magnetización si es afectada. Por esta razón se pueden definir las reactancias de la
máquina sincrónica de polos salientes de la siguiente forma:
x = xm + x
d
f
d
d
xq = xm + x
q
fq
14.110
Al realizar la separación de reactancias de fuga y magnetización indicadas en la
expresión anterior, se puede definir una nueva fuerza electromotriz detrás de las
reactancias de fuga de la máquina que indican el nivel de saturación a que se
encuentran sometidas las reactancias de magnetización de la máquina. Asumiendo
que las reactancias de fuga de los dos ejes son prácticamente iguales, la fuerza
electromotriz Ee se evalúa mediante la expresión siguiente:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 350 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
E e = V a + j x Ia
f
14.111
En la figura -221- se presenta una característica de magnetización o curva en
vacío típica, donde se han indicado algunas de sus asíntotas.
Linealizaciones
Ef
Vn
Característica
Saturada
if
if n
Característica de magnetización en vacío de la máquina sincrónica
Fig. -221-
Para analizar la saturación de la máquina sincrónica es necesario descomponer
las fuerzas magnetomotrices producidas por cada eje. La fuerza magnetomotriz de
armadura está orientada según la dirección de la corriente de armadura y se puede
descomponer en dos componentes, una en la dirección del eje directo asociada con la
corriente del eje directo, y otra según la dirección del eje cuadratura asociada con la
corriente del eje cuadratura. La fuerza electromotriz del campo está dirigida según el
eje cuadratura y debe ser producida por una fuerza magnetomotriz que está
adelantada 90° con respecto a ella. De esta forma el diagrama de fuerzas
magnetomotrices de la máquina sincrónica es similar al que se observa en la figura 222-.
Las fuerzas magnetomotrices orientadas en la dirección del eje cuadratura
actúan sobre reluctancias grandes, debido a que en esta zona el entrehierro de la
máquina es considerable. Por este motivo, las reactancias definidas por los flujos
producidos por estas fuerzas magnetomotrices no están afectados por los fenómenos
de saturación. En el eje directo la situación es diferente, los flujos del eje directo no
son proporcionales a las fuerzas magnetomotrices que los producen, dependen del
nivel o grado de saturación alcanzado por la máquina en su punto de operación. En la
figura -223- se presenta un diagrama fasorial donde se muestran las fuerzas
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 351 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
electromotrices y flujos en los diferentes ejes de la máquina sincrónica de polos
salientes.
w
Ff
Ef
Fq=N Iq
Iq
Id
e je q
Ia
Fd =N Id
Fa =N Ia
e je d
Diagrama fasorial de las fuerzas magnetomotrices de la máquina sincrónica
Fig. -222-
Las fuerzas magnetomotrices de los ejes directo y cuadratura no se pueden
sumar porque están aplicadas sobre caminos magnéticos diferentes, con reluctancias
diferentes. Una pequeña fuerza magnetomotriz resultante sobre el eje directo produce
un flujo de gran magnitud debido a que este eje posee una gran permeanza. Por el
contrario, la fuerza magnetomotriz según el eje cuadratura produce un débil flujo en
esta dirección debido a la gran reluctancia de este eje. La superposición de los flujos
resultantes en cada uno de los ejes coordenados produce el flujo resultante total ft
ilustrado en la figura -223-. Este flujo induce la fuerza electromotriz Ee que está
retrasada 90° con respecto a este fasor. De las dos componentes del flujo, solamente
la componente resultante del eje directo fd es afectada por la saturación del material
magnético. Esta componente del flujo, produce la fuerza electromotriz Eeq, retrasada
también 90° con respecto al flujo.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 352 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Ff
fq
F
fd
T
=F -F
f
d
d
fT
Fq
F Td
Ef
Eeq
Ee
Eed
j (xd-xq) Id
j xq Ia
Va
Fd
e je q
jxf Ia
Fa
e je d
Diagrama fasorial de la máquina sincrónica indicando los flujos en los diferentes ejes
Fig. -223-
La fuerza magnetomotriz Eeq es proporcional al flujo resultante del eje directo
fd y este valor puede ser utilizado como indicador del grado de saturación del eje
directo de la máquina. Las permeanzas de los caminos magnéticos del eje directo y
del campo son iguales, por lo tanto es posible utilizar la característica de
magnetización para corregir la reactancia del eje directo de la máquina sincrónica en
un punto de operación determinado. La reactancia del eje cuadratura no se satura por
que su permeanza es muy reducida. Este hecho permite identificar la posición del eje
cuadratura y determinar de esta forma la magnitud del fasor Eeq. Si esta componente
de la fuerza electromotriz fuese generada mediante el flujo producido por la corriente
de campo, se necesitaría un determinado valor en la máquina no saturada y un valor
mayor en la máquina saturada. La proporción entre estas dos corrientes es
dependiente directamente de la variación de permeanza existente entre el caso lineal
y el saturado. La reactancia de magnetización del eje directo se puede expresar
como:
xm = w L
d
2
2
= w N Pm = w N P
qd
df
d
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 353 -
14.112
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
La fuerza electromotriz producida en la armadura por la bobina de campo es:
E =
f
1
1
1
wL i =
wL i =
wN N P i
qf
f
df
f
d f df f
3
3
3
14.113
En las dos expresiones anteriores se observa que las permeanzas de los
caminos magnéticos son iguales, por esta razón se utiliza la característica de
magnetización o curva de vacío para evaluar la permeanza del camino magnético. En
la figura -224- se observa que para producir una determina fuerza electromotriz Eq es
necesaria la corriente ifo para una máquina lineal y ifsat para la máquina saturada.
Mediante la expresión 14.113se deduce la siguiente relación entre la permeanza
saturada y lineal de la máquina para el camino magnético que une al campo con la
bobina del eje directo:
Eeq =
1
1
i =
i
w NeN P
w NeN P
f
df
lin.
fo
f df sat. f sat.
3
3
14.114
De la expresión anterior se deduce el siguiente resultado:
P
df sat.
P
df lin.
i
= f sat. º 1
s
i
fo
14.115
donde s se define como el coeficiente de saturación de la máquina sincrónica para el
punto de operación dado.
Ef
E eq
i
P
f sat.
º
s
= df lin.
i
P
fo
if o
df sat.
if
if sat.
Definición del grado de saturación de la máquina sincrónica de polos salientes
Fig. -224-
Reemplazando la expresión obtenida en 14.111 en la 14.108 se obtiene la
reactancia de magnetización saturada del eje directo:
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 354 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
2
xm
=wN P
df sat.
=wN
P
2
df lin.
s
=
xm
d lin.
s
14.116
La expresión anterior indica que la reactancia de magnetización saturada xmd
sat. es menor que la reactancia lineal xmd lin. debido a que el coeficiente de saturación
d sat.
“s” es siempre mayor o igual a la unidad según la definición 14.115. La reactancia
saturada total del eje directo se calcula añadiendo a la reactancia saturada de
magnetización del eje directo, la reactancia de fuga de la máquina. Esta última
reactancia es independiente del grado de saturación de la máquina:
x
d sat.
= xm
+x =
f
xm
d lin.
s
+x =
(x
f
d lin.
-x )
f
s
x
+ x = dslin. + x s-1
f
f s
14.117
Conocidas las reactancias de la máquina en un punto de operación
determinado, se puede obtener el diagrama fasorial completo. Conocida la magnitud
de la fuerza electromotriz producida por el campo es posible calcular la corriente de
campo necesaria a partir de la expresión 14.113:
E
d sat.
= 1 wN N P
i = 1 wN N
f sat.
d
f
df
sat.
f
d f
3
3
P
df lin.
s
L
i = 1 w dfslin. i
f
f
3
14.118
por lo tanto:
E
i
Eeq
fo
= 1 wL
i =
i
f sat.
df lin. i
f i
f
3
f sat.
f sat.
14.119
La ecuación 14.119 indica que para el punto de operación dado, la
característica que determina la fuerza electromotriz producida por el campo en la
condición de carga, es una recta que pasa por el origen y por el punto de intersección
entre la fuerza electromotriz Eeq y la corriente ifsat., tal como se ilustra en la figura -225Si se conocen las magnitud de la tensión y corriente de armadura, el ángulo del
factor de potencia, las reactancias lineales de la máquina y la característica de
magnetización en vacío, se puede obtener el diagrama fasorial completo y la corriente
de magnetización necesaria para mantener el punto de operación. En primer lugar se
procede a ubicar la posición del eje cuadratura, multiplicando la corriente de armadura
por la reactancia cuadratura y sumando este término a la tensión de armadura.
El segundo paso consiste en calcular el fasor Ee sumando a la tensión de
armadura la caída en la reactancia de fuga.
Posteriormente se proyecta
ortogonálmente esta fasor con respecto al eje cuadratura para obtener la magnitud de
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 355 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Eeq. Con esta fuerza electromotriz se entra en la curva de vacío y se calcula el grado
de saturación correspondiente al punto de operación de la máquina. El grado de
saturación “s”, determinado mediante la característica de vacío se utiliza para corregir
la reactancia del eje directo mediante la expresión 14.117, y con esta reactancia se
calcula la fuerza electromotriz producida por el campo.
Para determinar la corriente de campo necesaria para mantener el punto de
operación es necesario utilizar la ecuación 14.119. Si la máquina cambia su punto de
operación, es necesario recalcular el nuevo grado de saturación y evaluar la
reactancia del eje directo y la corriente del campo. En la figura -226- se muestra el
procedimiento descrito anteriormente.
Ef
Característica
lineal
Característica
de carga
E f sat.
Característica
de vacío
E eq
E =
f
sº
if o
if sat.
Eeq
i
i
f sat.
i
f sat.
i
fo
=
f
P
df lin.
P
df sat.
i f ope.
if
Fuerza electromotriz producida por el campo en una condición de carga
Fig. -225-
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 356 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Ef sat.
j (xds -xq) I d
E eq
d
Va
f
j xq I a
Ee
j xf I a
E f sat.
Efo
E eq
Id
Ia
If
e je d
Ifo Ifsat. Ifope.
Construcción del diagrama fasorial de la máquina sincrónica de polos salientes saturada
Fig. -226-
El análisis de la saturación de la máquina sincrónica de rotor liso presenta un
inconveniente práctico. En la máquina de polos salientes, la reactancia del eje
cuadratura no se satura debido a que en este eje la reluctancia es muy grande. En los
rotores lisos, este hecho no es así, y la reactancia de eje cuadratura también se
satura. Si esta reactancia está saturada y el grado de saturación depende del punto
de operación de la máquina, no es posible evaluar directamente el valor de esta
reactancia sin determinar previamente la posición del eje cuadratura. Como esta
posición no es un dato, se utiliza un proceso o método iterativo para localizar el eje.
En principio se puede considerar que la máquina no está saturada en el eje cuadratura
y calcular con esta aproximación la proyección de la fuerza electromotriz Ee sobre el
eje directo. Con esta proyección se determina el grado de saturación del eje
cuadratura mediante el procedimiento descrito anteriormente para el eje directo. Esta
primera aproximación al grado de saturación se utiliza para corregir la reactancia del
eje cuadratura y recalcular la posición de este eje. Con la nueva posición se repiten
todos los pasos anteriores hasta que el grado de saturación en la iteracción anterior y
la actual converjan a un valor del error inferior al que se ha especificado previamente.
A partir de este punto, el diagrama fasorial se determina de igual forma similar que en
el caso de la máquina sincrónica de polos salientes, debido a que la posición de los
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 357 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
ejes de la máquina queda completamente definida. En presencia de saturación las
reactancias del eje directo y cuadratura de la máquina sincrónica de rotor liso son
diferentes.
En el pasado se utilizaba con frecuencia la curva de saturación en carga para
analizar los fenómenos de saturación de la máquina sincrónica. Esta característica
representa la tensión en bornes de la máquina en función de la corriente de campo.
Se determina para las condiciones de mayor caída de tensión en las reactancias, es
decir con la corriente de armadura nominal y carga puramente inductiva. En este caso
las caídas en las reactancias están en fase con la tensión de armadura. La
característica de saturación en carga se obtiene a partir de la característica de
excitación en vacío restando la caída en la reactancia de dispersión, e incrementando
la corriente de campo lo suficiente para compensar la desmagnetización ocasionada
por la corriente de armadura. Manteniendo constantes la corriente de armadura y el
factor de potencia, se mantienen constantes la caída en la reactancia de dispersión y
la fuerza electromotriz necesaria para magnetizar la máquina. De esta forma se
obtiene el triángulo de Potier que determina la característica de saturación en carga a
partir de la característica de excitación en vacío. En la figura -227- se muestra este
diagrama y el triángulo de Potier correspondiente.
Va
Ia = 0
x In
f
I a = In
cos f = 0
aF
e
if
aF
f
Característica de saturación en carga - Triángulo de Potier
Fig. -227-
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 358 -
if
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
14.14 La máquina sincrónica en el sistema eléctrico
La máquina sincrónica se puede utilizar como generador, tanto para alimentar
cargas aisladas o para entregar potencia a una red eléctrica compleja. Para
incrementar la cantidad de potencia es necesario aumentar el flujo de vapor, agua o
gas que está circulando por la turbina de accionamiento. Al incrementa la potencia de
accionamiento de un generador que alimenta a una carga aislada, las masas rotantes
del sistema se aceleran y aumenta la frecuencia y la fuerza electromotriz. Estas
nuevas condiciones de operación deben ser corregidas mediante un controlador de
velocidad y tensión que mantengan dentro de los límites tolerables a estas variables.
Este controlador debe realizar sus funciones ante otros tipos de perturbaciones como
pueden ser variaciones de la carga eléctrica del sistema. El controlador de la máquina
sincrónica debe actuar sobre el sistema de accionamiento mecánico para regular la
velocidad y sobre la excitatriz o campo para regular la tensión en bornes ante
variaciones de la carga. Con estas dos acciones de control es posible garantizar un
suministro de tensión y frecuencia constante a una carga aislada, independientemente
del nivel de demanda de potencia eléctrica a que está siendo sometido el generador.
En la figura -228- se ha representado el diagrama de un generador sincrónico que
alimenta a una carga aislada, y es controlado en velocidad y tensión.
wref
C ontrolador
Tacómetro
Q
R
Z
S
Z
Campo
Regulador
Máquina
mot riz
T
Carga
N
Z
Q
Vref
Fuente
Excitatriz
Comparador
Generador sincrónico alimentando una carga aislada
Fig. -228-
Cuando la máquina sincrónica inyecta potencia a un sistema eléctrico de
potencia, no es indispensable regular la tensión y velocidad porque estas funciones
son realizadas por el acoplamiento máquina-sistema. Al aumentar el caudal de fluido
energético que circula por la máquina motriz, se incrementa el torque de
accionamiento y la potencia mecánica inyectada por el eje mecánico. La velocidad
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 359 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
mecánica
permanece
prácticamente
constante
durante
este
proceso,
incrementándose la potencia eléctrica entregada a la red para mantener la condición
de equilibrio existente. Aun cuando la velocidad permanece prácticamente constante,
el ángulo de carga aumenta para permitir una mayor entrega de potencia al sistema
eléctrico. Esta situación se puede mantener mientras que la máquina no alcance el
punto crítico correspondiente a la potencia eléctrica máxima. Si por el eje mecánico
del rotor se entrega aun más potencia que la máxima potencia eléctrica que puede
generar la máquina sincrónica, el ángulo de carga continúa incrementándose por
encima del valor crítico, esto ocasiona una reducción de la potencia eléctrica generada
por la máquina, y se produce una aceleración mantenida del rotor que hace perder el
sincronismo con la red.
Durante el funcionamiento sincronizado de la máquina con el sistema se puede
controlar el nivel de potencia reactiva entregada o consumida por la máquina
sincrónica ajustando su corriente de campo. También es posible controlar mediante la
corriente de campo el nivel de tensión en bornes de la máquina. Cuando se controla
el nivel de reactivos de la máquina sincrónica, se dispone de una barra PQ en lo que
se refiere al flujo de carga del sistema. Si se controla la tensión en bornes del
generador, el comportamiento de la barra es del tipo PV. En ambos casos los
operarios o el controlador de la planta mantienen la potencia dentro de unos límites
cercanos a una referencia y el sistema de control de la excitación mantiene, o los
reactivos de referencia, o la tensión de referencia. Alguna de las máquinas del
sistema eléctrico de potencia se utiliza para controlar la velocidad sincrónica, a esta
máquina se la realimenta en frecuencia y se le define una referencia de frecuencia y
tensión. En los estudios de flujo de carga a esta máquina se le denomina barra de
referencia o barra “slack”. En la figura -229- se presenta un diagrama simplificado que
muestra el comportamiento de la máquina sincrónica en equilibrio con un sistema
eléctrico de potencia.
Para conectar una máquina sincrónica a la red, se hace girar el rotor a la
velocidad sincrónica mediante la máquina motriz. Como la máquina se encuentra
desconectada de la red, es necesario menos del 1% de la potencia nominal mecánica
para suplir las pérdidas durante la operación en vacío. El siguiente paso consiste en
alimentar la excitatriz de la máquina y ajustar el nivel de tensión de armadura al nivel
de tensión de la red eléctrica. Una vez verificado que las tensiones de la máquina y
del sistema poseen la misma magnitud, fase y secuencia se cierra el interruptor que
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 360 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
conecta a la máquina con el sistema. Si la sincronización ha sido realizada
exitosamente, la corriente que circula por la conexión es prácticamente despreciable.
Si alguna de las condiciones necesarias para una sincronización adecuada no es
satisfecha, las corrientes de armadura pueden ser tan grandes como para activar las
protecciones de la planta de generación. La detección de las condiciones de
sincronización se realizan mediante un equipo denominado sincronizador.
El
sincronizador mide las tensiones, frecuencias y diferencias de fase entre la máquina y
la red. Los sincronizadores modernos utilizan microprocesadores para realizar las
operaciones de supervisión y mando de los controladores que ajustan la velocidad de
la máquina, la tensión de armadura y la fase relativa. Una vez que el sincronizador
automático detecta las condiciones favorables envía una orden de cierre al interruptor
principal, logrando de esta forma una conexión rápida y segura de la máquina
sincrónica a la red eléctrica de potencia.
Fe
Q
d'
Ff
R
R
Pm
R egulador
S
T
Pe
Pe max.
Pe = Pm
S
Máquina
mot riz
zona
ines table
T
Q
Pe
F uente
Ex citatriz
Comparador
d
d'
dcr ític o
Vref ó Qref
Operación de la máquina sincrónica acoplada al sistema eléctrico de potencia
Fig. -229-
Una vez que la máquina ha sido sincronizada al sistema eléctrico, es suficiente
con aumentar la potencia mecánica de accionamiento para entregar potencia eléctrica
a la red. Incrementando la corriente de campo se aumenta el nivel de reactivos
entregados por la máquina. Es necesario recordar que las corrientes de armadura de
la máquina consumen potencia reactiva inductiva al circular por sus reactancias. Para
compensar este fenómeno es necesario incrementar aun más la corriente del campo
si se desea entregar potencia reactiva neta desde la máquina hacia la red. Si
posteriormente a la sincronización se incrementa la potencia de accionamiento, la
máquina entregará a la red una potencia eléctrica equivalente. Sin embargo, si la
corriente de excitación no se incrementa, el aumento de la corriente de armadura para
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 361 -
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
permitir la inyección de potencia activa a la red, repercutirá en un consumo de
reactivos desde la red hacia la máquina. En muchos casos esta situación es
conveniente, debido al exceso de potencia reactiva que producen algunas líneas
largas de alta tensión. En cualquier caso la excitación permite controlar esta
inyección.
Una de las ventajas que se obtiene cuando se acciona cargas mecánicas
grandes, mediante motores sincrónicos, a parte del elevado rendimiento que es
posible obtener, consiste en la posibilidad de controlar el consumo de reactivos y los
niveles de tensión en las barras de la planta industrial. En la práctica esto puede
reducir considerablemente la facturación de energía y los cargos por bajo factor de
potencia.
Capítulo 14: La Máquina Sincrónica en Régimen Permanente
- 362 -