VI. Suma de fuerzas y equilibrio estático
Anuncio

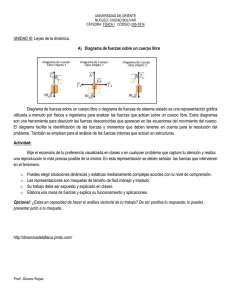
SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM SUMA DE FUERZAS Y EQUILIBRIO ESTÁTICO maw:08-10-99 04:43 9910/P10 VI-1 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM CAPÍTULO VI SUMA DE F UERZAS Y E QUILIBRIO ESTÁTICO VI. SUMA DE FUERZAS Y EQUILIBRIO ESTÁTICO .................................................VI-3 VI.1. SUMA DE FUERZAS ........................................................................................................ VI-3 VI.2. EQUILIBRIO DE TRASLACIÓN .......................................................................................... VI-5 VI.3. FUERZAS DE CONTACTO................................................................................................. VI-5 VI.4. CUERDAS Y CABLES....................................................................................................... VI-8 VI.5. EQUILIBRIO ROTACIONAL .............................................................................................. VI-8 VI.6. CENTRO DE MASA ........................................................................................................ VI-10 maw:08-10-99 04:43 9910/P10 VI-2 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM VI. Suma de fuerzas y equilibrio estático VI.1. Suma de fuerzas El efecto combinado de dos o más fuerzas actuando sobre un cuerpo no se obtiene simplemente sumando los valores ( o magnitudes ) de las fuerzas, como puede apreciarse en las situaciones siguientes : En el primer caso, los efectos de las dos fuerzas tienden a sumarse, mientras que en el segundo, tienden más bien a cancelarse entre sí. En el tercer caso, el efecto neto de las dos fuerzas en un “empujón” cuya magnitud no es la suma de las magnitudes de las fuerzas individuales, y cuya dirección tampoco corresponde a ninguna de las direcciones de las fuerzas originales. El efecto neto de varias fuerzas actuando simultáneamente sobre un cuerpo, se obtiene representándolas mediante “flechas”, y usando las siguientes “reglas gráficas”: r F1 r F2 r F1 r F3 r F2 = r F1 = r F3 = r F1 = r F4 r F1 = r F4 r F2 r F1 = r F1 + r F1 r F1 + + r F3 r F4 En la figura, se ha usado el signo “+” , no para designar a la operación de suma algebraica ordinaria sino para una nueva operación que “combina flechas”. maw:08-10-99 04:43 9910/P10 VI-3 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM Hay muchas otras variables físicas que se combinan o “suman” entre sí de la misma forma que las fuerzas. Algunos ejemplos son: los desplazamientos, las velocidades, las aceleraciones, los campos gravitacionales, eléctricos y magnéticos, etc. Llamaremos vectores físicos a este tipo de variables. Un vector físico no queda completamente determinado por su magnitud: es necesario indicar además su dirección. Llamaremos suma vectorial a la operación de combinar dos o más vectores del mismo tipo (Ver página II-19). maw:08-10-99 04:43 9910/P10 VI-4 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM VI.2. Equilibrio de traslación Un cuerpo está en equilibrio de traslación cuando la suma vectorial de todas las fuerzas que actúan sobre él es cero. Si, además, el cuerpo se encuentra en reposo, entonces permanecerá en reposo y decimos que el equilibrio es estático. VI.3. Fuerzas de contacto Frecuentemente en la vida diaria ignoramos el origen microscópico de ciertas fuerzas que ejercen los cuerpos entre sí. Por ejemplo, un objeto que descansa sobre una mesa es atraído hacia el centro de la Tierra por la fuerza gravitacional. El hecho de que el cuerpo no caiga implica necesariamente que la mesa lo está “empujando” verticalmente hacia arriba para sostenerlo. El origen de esta fuerza ejercida por la mesa sobre el objeto es, en último término, la repulsión electromagnética entre los átomos de la mesa y los del objeto. A nivel microscópico no existe realmente el contacto directo entre los cuerpos sólidos que percibimos con nuestros sentidos. Pero, para todos los efectos prácticos, podemos considerar que la mesa empuja hacia arriba con una fuerza que llamaremos “de contacto”. Si la mesa está en posición horizontal, esta fuerza es perpendicular ( o "normal" ) a la superficie. Podemos calcular la magnitud de esta fuerza utilizando el hecho de que el cuerpo que descansa sobre la mesa está en equilibrio estático : r C r r r r C + P = 0 ⇒ C = −P r P En este caso, la fuerza de contacto tiene magnitud igual al peso del objeto y está dirigida verticalmente hacia arriba. Observe, sin embargo, que esto no siempre es así. Suponga que, a continuación, usted empuja el objeto verticalmente hacia abajo. Como el objeto permanece en maw:08-10-99 04:43 9910/P10 VI-5 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM equilibrio, la mesa tendrá que ejercer ahora una fuerza de contacto de magnitud igual al peso del objeto más la magnitud de la fuerza ejercida por usted. r C r F r r r r r r C + P + F = 0 ⇒ C = − P +F ( ) r P Frecuentemente se comete el error de considerar que la fuerza de contacto que sostiene a un cuerpo “contra la gravedad” es la reacción al peso del objeto. Esto es claramente falso, como puede apreciarse en el ejemplo previo. Si, a continuación, la superficie de la mesa se inclina respecto a la horizontal en un ángulo no “muy grande” de modo que el objeto no resbale, se observa. r C r C Normal r P Roce r r C = −P r r r C =N+R Como el objeto permanece en equilibrio, la fuerza ejercida por la superficie debe ser aun igual en magnitud al peso del cuerpo y opuesta en dirección. Pero, entonces, dicha fuerza ya no es perpendicular a la superficie, sino que tiene además una componente paralela a la superficie. Se deduce, por tanto, que una superficie no sólo puede ejercer fuerzas perpendiculares, sino también fuerzas paralelas a ella. Llamamos fuerza de roce o de fricción a las fuerzas ejercidas por una superficie en dirección paralela ( o tangencial ) a ella. Cuando no hay resbalamiento entre las superficies en contacto, hablamos de roce estático y, en caso contrario, de roce cinético. Es evidente que hay un límite a la magnitud que puede tener la fuerza de roce estático ejercida por una superficie. Esto puede comprobarse fácilmente aumentando la inclinación de la maw:08-10-99 04:43 9910/P10 VI-6 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM mesa, hasta que el objeto comience a resbalar. Tal límite depende de dos factores : la naturaleza de las superficies en contacto y la magnitud de la componente perpendicular de la fuerza de contacto entre las superficies ( ya que esta componente nos dice cuán “apretadas” una contra la otra están las dos superficies ). Esto se expresa mediante la relación : festática = µe ⋅ N , máxima en donde µe es una constante llamada coeficiente de roce estático, y N es la componente perpendicular de la fuerza de contacto. Obsérvese que la expresión da el valor de la magnitud de la fuerza de roce estático sólo si el objeto está a punto de resbalar sobre la superficie. En general se cumple que : f estática ≤ µ e ⋅ N , Si un cuerpo resbala sobre una superficie, ésta ejerce sobre aquél una fuerza llamada roce cinético, que se opone al deslizamiento, y cuya magnitud está dada por la relación : fcinética = µc ⋅ N , donde µc es una constante llamada coeficiente de roce cinético. A pesar de la similitud entre las expresiones para festática máx. y para fcinética , ellas son de un carácter muy diferente: la primera de ellas sólo se refiere al valor máximo que puede tener la fuerza de roce estático, mientras que la segunda nos da directamente la magnitud de la fuerza de roce cinético. Las fuerzas de roce, al igual que la fuerza de contacto perpendicular, provienen de las fuerzas de cohesión y de repulsión entre los átomos de los cuerpos en contacto. Las fuerzas de contacto juegan un rol muy importante en nuestra vida diaria: son fuerzas de contacto las que actúan cuando nos paramos sobre el suelo, cuando caminamos, cuando sostenemos objetos en nuestras manos y también cuando chocamos contra algún obstáculo. maw:08-10-99 04:43 9910/P10 VI-7 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM VI.4. Cuerdas y cables Las cuerdas, cables y otros objetos similares, sólo pueden ejercer fuerzas cuando están tensos. Corte imaginario Llamamos tensión a la magnitud de la fuerza transmitida por una cuerda. Si hacemos un corte imaginario a través de una sección transversal de una cuerda tensa, cada porción de dicha cuerda “tira” a la otra porción con una fuerza de magnitud igual a la tensión de la cuerda. Las fuerzas de tensión provienen de la cohesión entre los átomos del material de la cuerda y son, por tanto, de origen electromagnético. VI.5. Equilibrio rotacional Un cuerpo sometido a la acción de varias fuerzas cuya suma es cero, puede no estar en equilibrio, como puede apreciarse en la segunda de las siguientes situaciones: r F2 r F2 r F1 r F1 r r F1 + F2 = 0 r r F1 + F2 = 0 En el segundo caso, a pesar de que la fuerza neta es cero, la mesa no permanece en equilibrio. En este caso la combinación de fuerzas produce una rotación de la mesa. maw:08-10-99 04:43 9910/P10 VI-8 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM El efecto rotacional de una fuerza depende de varios factores, como puede apreciarse en la siguiente situación, en la cual varias fuerzas de igual magnitud actúan sobre una puerta : Definimos el brazo de una fuerza, como la distancia entre la línea de acción y el eje en torno al cual el cuerpo podría girar : Línea de acción brazo Punto de aplicación eje Definimos el efecto rotacional o torque de una fuerza, como el producto de la magnitud de la fuerza por su brazo. τ = F · b Si varias fuerzas actúan simultáneamente sobre un cuerpo, consideraremos positivos aquellos torques que tienden a hacer girar el cuerpo en un sentido dado, y negativos a los demás. Un cuerpo se encuentra en equilibrio de rotación cuando la suma de los torques que actúa sobre él es cero. Para que un cuerpo se encuentre en equilibrio debe estar tanto en equilibrio de traslación como de rotación. maw:08-10-99 04:43 9910/P10 VI-9 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM VI.6. Centro de masa La fuerza que ejerce la Tierra sobre un cuerpo, es ejercida sobre cada partícula del cuerpo. CM r P Para los efectos de calcular el torque producido por el peso, puede considerarse que la fuerza de gravedad está aplicada en un punto particular del cuerpo, llamado centro de masa. Si el cuerpo es simétrico, como un cubo o una esfera homogéneos, el centro de masa coincide con el centro de simetría. Una forma práctica de determinar la posición del centro de masa de un cuerpo plano ( lámina o placa ), es suspendiéndolo de algún punto; al alcanzar el equilibrio, el centro de masa debe estar verticalmente debajo del punto de apoyo, el brazo es cero y el torque debido al peso es cero. r P r P Si marcamos sobre la placa la vertical que baja desde el punto de apoyo, sabremos que su centro de masa estará sobre esa recta. Para determinar la posición, repetimos la operación con otro punto de apoyo : CM r P Entonces, el centro de masa estará en la intersección de las dos rectas así obtenidas. maw:08-10-99 04:43 9910/P10 VI-10 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM En el caso de objetos con algún grado de simetría, el centro de masa (CM) debe estar en algún punto, línea o plano especial. Así, por ejemplo, en un cubo o una esfera homogéneos, el centro de masa coincide con el centro geométrico del cuerpo. Para el caso de un objeto que tiene un eje de simetría ( por ejemplo una botella ), el CM debe estar en algún punto de dicho eje. Una taza, en cambio, no tiene un eje de simetría debido a su única “oreja” , pero sí es simétrica respecto a un plano vertical que la corta por la mitad: El CM de la taza debe estar en algún punto de este plano. En algunos casos, un objeto puede descomponerse en partes más simétricas. Por ejemplo, considere una tabla en forma de “L”, de las dimensiones indicadas ( en pulgadas ). 7 5 2 3 5 El plano que pasa por la mitad del espesor de la placa es un plano de simetría, por lo que el CM debe estar en él. maw:08-10-99 04:43 9910/P10 VI-11 SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM Para ubicar el CM dividimos imaginariamente la tabla en dos rectángulos; cada uno tiene un punto de simetría. y 5 7 2 2 x 3 Las coordenadas del CM de la tabla son un “promedio ponderado” de las coordenadas de los CM individuales. El “factor de ponderación” es la masa de cada parte dividida por la masa total del objeto: m1 x CM = x 1 m1 + m 2 m2 + x 2 m +m 2 1 En el caso particular de esta placa, m1 = e A1 ρ donde e es el espesor , A1 el área del rectángulo 1 y ρ es la densidad del material; entonces, la masa total es: m = m1 + m2 = e ρ ( A1 + A2 maw:08-10-99 04:43 9910/P10 VI-12 ) SUMA DE F UERZAS Y EQUILIBRIO ESTÁTICO V. SLÜSARENKO - FÍSICA INDUSTRIAL - UTFSM de modo que: x CM e ρ A2 e ρ A1 + x 2 = x1 ( ) ρ ( + ) ρ + e A A e A A 1 2 1 2 A1 A2 + x 2 = x1 A1 + A2 A1 + A2 14 + 3,5 ≈ 1 + 14 6 6 + 14 6 x CM ≈ 1,75 [ in ] La coordenada yCM se calcula de un modo similar. maw:08-10-99 04:43 9910/P10 VI-13