capítulo 3.4: recepción de fruta
Anuncio

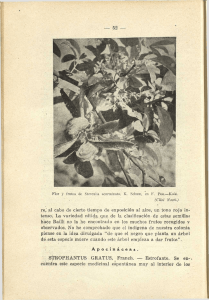
91 CAPÍTULO 3.4: RECEPCIÓN DE FRUTA 3.4.1.- Introducción. Mejoras en la recepción tradicional La recepción de la fruta que se derriba de los árboles ha evolucionado desde la extensión manual de mantos, pasando por estructuras que no representan más que una mejora para colocación y recogida de las mallas sobre el suelo, hasta sistemas mucho más complejos consistentes en dos unidades de máquinas que se desplazan simultáneamente a ambos lados de la línea de árboles, llegando por último al denominado sistema de paraguas invertido, que consiste en una estructura que envuelve el árbol desde el tronco. • Las estructuras receptoras extensibles se desplazan entre las líneas de cultivo y consisten en un simple transportador con grandes redes sujetas a cada lado del mismo, las cuales son desenrolladas manualmente y extendidas sobre el suelo bajo el árbol. Una vez derribado el fruto, la red es enrollada mecánicamente y los frutos son descargados en el interior de un contenedor, que en la mayoría de los casos es el propio remolque. Figura 3.4.1.- Mallas enrollables en remolque. • De los modelos básicos han aparecido prototipos que los convierten en máquinas autoextensibles gracias a sistemas, como el de doble tijera, o neumáticos, que permite extender y recoger la malla bajo la copa del árbol. 92 Figura 3.4.2.- Esquema de dos modelos de recogedoras autoextensibles. • La mecanización integral de la recepción de fruta comenzó cuando aparecieron los sistemas que utilizan dos máquinas a base de planos inclinados que se desplazan a ambos lados de los árboles frutales una de las cuales incorpora un amplio transportador y un porta-palet para llevar los contenedores en los que se carga la fruta mientras la máquina trabaja (Porras et al, 1999). Figura 3.4.3.- Modelo comercial de cosechadora de fruta compuesto de dos unidades. Figura 3.4.4.- Detalle de fruto sobre plano inclinado receptor. Cada unidad es autopropulsada y sobre sus planos, inclinados hacia el árbol, bajo el que se extienden a base de pistones hidrostáticos, una vez derribados los frutos, ruedan y son vertidos en el transportador. Un vibrador montado en una de las estructuras dotado de movimiento de desplazamiento hacia el árbol, agarra el tronco del árbol y le transmite la vibración. El rendimiento de recolección llega a ser superior a los 60 árboles/hora, en plantaciones de unos 300 árboles/ha formadas adecuadamente con un sólo pie. 93 La unidad portacontenedores lleva incorporado un sistema de limpieza a base de una corriente de aire para eliminar los residuos más groseros antes de que caigan los frutos al interior del contenedor. Figura 3.4.5.- Llenado y limpieza simultánea de los contenedores. • El mayor avance en la recepción de fruta derribada de los árboles se dio cuando aparecieron máquinas de tipo paraguas invertido, que constituyen auténticas cosechadoras de fruta de los árboles. La superficie receptora es un tejido sostenido por unos brazos que giran plegándolo alrededor del tronco. Figura 3.4.6.- Cosechadora del tipo de paraguas invertido. En las más avanzadas máquinas de este tipo, cuando vibra el árbol los frutos derribados caen a la superficie de recogida y ruedan hasta cintas transportadoras que los elevan haciéndolos pasar por una limpiadora de chorro de aire, en la que separan los frutos de hojas y tallos llevándolos a 94 uno o dos contenedores que la máquina lleva lateralmente y que, una vez llenos, se depositan en el terreno entre las líneas de árboles, para, posteriormente, ser recogidos mediante simples máquinas elevadoras en remolques o camiones, que se utilizan para su transporte. Figura 3.4.7.- Desplazamiento de la cosechadora de un árbol al siguiente. En algunas ocasiones se puede presentar la posibilidad de elegir entre recoger los frutos del suelo o recolectarlos mediante sistemas de recepción. Los sistemas de recolección de frutos del suelo tienen, frente a las estructuras recogedoras, las siguientes ventajas: (Kepner R.A. et al, 1975). • Permiten trabajar con árboles de copa relativamente baja. • Las máquinas son sencillas. • Pueden adaptarse a las plantaciones antiguas. • Son independientes del sistema de derribo de los frutos. • La capacidad de los vibradores puede casi doblarse. • Se adaptan a los frutos que caen de forma natural. En cambio, las desventajas de los sistemas de recolección de frutos del suelo, frente a las estructuras de recepción, son las siguientes: • Exigen una exhaustiva preparación del suelo. 95 • Necesitan la eliminación de residuos en la plantación. • Recogen una elevada cantidad de impurezas con la fruta. • Causan heridas superficiales. • Disminuyen la calidad de los frutos recogidos. 3.4.2.- Recepción de aceituna Tradicionalmente la aceituna, cualquiera que sea el procedimiento de derribo, se recoge normalmente sobre redes de material plástico colocadas previamente bajo los árboles. La mano de obra utilizada para el conjunto de manipulaciones de extendido, recogida del fruto y traslado de redes, es aproximadamente de 12-13 minutos de trabajo de hombre por árbol, y en el caso de recolección por vareo representa del 10 al 25% del tiempo total necesario para hacer la cosecha (Porras et al, 1980). Figura 3.4.8.- Redes de recepción de aceituna. La superficie cubierta por las lonas debe ser mayor que la zona de goteo del olivo para evitar que las aceitunas caigan fuera al ser derribadas, lo que llevaría consigo su pérdida por abandono sobre el terreno o un encarecimiento de la recolección en el caso de que no se dejen perder y se recojan. 96 • Una solución utilizada con cierta frecuencia en el sur de Italia es la de colocar redes de plástico fijas bajo los árboles antes del comienzo de la caída. Esta solución tiene el inconveniente del elevado coste que supone cubrir el ruedo de cada árbol. Figura 3.4.9.- Acolchado del olivar. • Para mecanizar la operación de recogida y extendido, de mallas, han aparecido en el mercado, largos remolques del tipo góndola, lo que facilita su desplazamiento, con las mallas recogidas en sendos ejes colocados longitudinalmente en el remolque. Cuatro operarios las extienden debajo del olivo, el fruto es derribado sobre ellas y, una vez cargadas con la aceituna, el tractorista que maneja el remolque acciona un embrague o un motor hidráulico que hace girar los ejes soporte de las lonas, recogiendo éstas y elevando el fruto para que caiga al interior del remolque. Este sistema necesita dos operarios en cada malla que tienen que ayudar a la elevación final del fruto para que se introduzca en el remolque. Sencillas modificaciones han servido para perfeccionar estos remolques convirtiéndoles, si no en autocargadores, si al menos haciendo más cómoda y eficiente la labor efectuada por los operarios, ya que evita el incómodo esfuerzo final para cargar el fruto. Para conseguirlo, sobre las mallas sustituidas por lonas plastificadas se colocan listones transversales de material plástico. Dichos travesaños se construyen con dimensiones tales que, permiten subir prácticamente sin ayuda las aceitunas. 97 Figura 3.4.10.- Remolque autocargador y remolque autocargador con vibrador incorporado. • Los sistemas de planos inclinados prácticamente no se han usado en la recolección de aceitunas, quizás porque, basándose en la experiencia adquirida en otros frutales, en el mercado han aparecido máquinas vibradoras montadas sobre tractor provistas de los receptáculos del tipo de paraguas invertido. Estas máquinas presentan una primera limitación en el hecho de que sólo pueden emplearse con eficacia en la recepción de la aceituna en árboles formados en un solo pie. Figura 3.4.11.- Vibrador con receptor tipo paraguas invertido. Los modelos de receptores de tipo paraguas invertido ofrecen buenas perspectivas, y aunque los modelos hasta ahora comercializados son mucho más simples y con menos prestaciones que los que se construyen en EE.UU., los esfuerzos de investigación dirigidos a mejorar sus posibilidades, harán que en olivar, el derribo y recepción de las aceitunas se conviertan en faenas técnicamente resueltas con máquinas de alta eficacia y eficiencia. 98