Introducción al radar
Anuncio

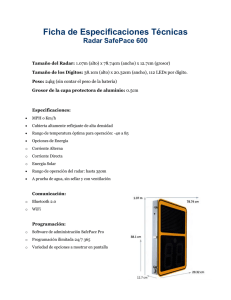
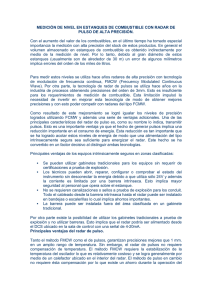
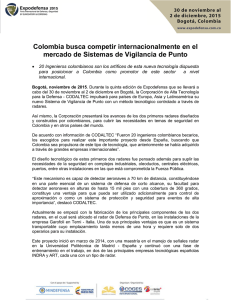
2o Cuatrimestre Radiodeterminación ITT Introducción al radar Due: 28 Febrero Un sistema RADAR recibe su nombre de las palabras RAdio Detection And Ranging. Si los definimos por la función que desempeñan y la manera de cómo lo hacen, diríamos que son sistemas cuyo objetivo es descubrir la presencia de blancos a una cierta distancia (range 1 ) gracias a la detección de ecos producidos por los mismos en respuesta a la emisión de señales electromagnéticas, que pueden ser de diferentes tipos (formas de onda), que son transmitidas por antenas de marcada directividad. Además de la mera presencia de blancos, a menudo se desea conocer alguna característica de los mismos, como, por ejemplo, su posición, su velocidad, su forma, etc. Con respecto a las dos primeras, veremos que fundamentalmente la posición se determina mediante el tiempo de retardo en la llegada del eco, y la velocidad gracias al desplazamiento Doppler de la señal recibida como eco respecto a la enviada. Para conocer otros aspectos del blanco podemos tener en cuenta la intensidad del eco, por ejemplo. Sobre estas ideas básicas se pueden construir conceptos de procesado más complejos que trascienden parcialmente estas idea básicas. Vamos a ver estos tres aspectos fundamentales mencionados arriba: alcance, desplazamiento Doppler e intensidad de la señal recibida como eco, en este último caso bajo el concepto de ecuación radar. 1 Alcance, alcance máximo no ambiguo y resolución en alcance Vamos a utilizar la fórmula de espacio=velocidad x tiempo para calcular tres cantidades: 1. el alcance o distancia a un blanco a partir del tiempo de retardo entre la señal transmitida y el eco recibido, 2. el alcance máximo no ambiguo cuando lo que transmitimos son una serie de pulsos separados por una cierta separación temporal 𝑇 que llamamos intervalo de repetición de pulso 3. la resolución en alcance, o separación mínima entre dos blancos para que sean identificados como dos blancos diferentes y no como un blanco único Vamos a presentar estos tres conceptos, para cada uno de los cuales se pedirá que se elabore una función de Matlab. Se integrarán todas en un único fichero .m en forma de una estructura con handles 2 , tal y como se explica en el Apéndice de este documento. 1.1 Alcance La distancia que separa un blanco del transmisor, 𝑅, se mide a través del tiempo transcurrido entre la transmisión de la señal y la recepción del eco, Δ𝑡 y vendrá dada por 𝑅= 𝑐Δ𝑡 2 (1) donde 𝑐 es la velocidad de la luz en el medio. El factor 1/2 se debe a que la distancia se recorre dos veces. 1.2 Alcance máximo no ambiguo Conviene fijarse en que estamos suponiendo implícitamente en nuestro razonamiento que estamos enviando un pulso corto, ya que si estuviésemos emitiendo una onda continua, no podríamos calcular el retardo ya que no sabríamos a qué parte de la onda emitida corresponde el eco. Ya veremos, no obstante, que sí hay maneras de trabajar con un radar de onda continua, pero de momento estamos trabajando con un pulso. Obviamente, transmitir un único pulso hace inútil nuestro radar, de manera que si hablamos de transmitir pulsos, hablamos de transmitir un pulso cada un cierto tiempo (ver figura 1). Este tiempo entre pulsos se puede llamar de dos maneras diferentes: periodo interpulso (IPP) o intervalo de repetición de pulsos (PRI). A partir de esta imagen, aparecen varios conceptos a los que poner nombre: 1 Ya 2 Un veremos que esta palabra inglesa se traduce también como alcance. handle es un tipo de clase implementado internamente en Matlab. 1 of 8 Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre Figure 1: En el caso de tener un tren de pulsos transmitidos, tendremos un tren de pulsos recibidos. Por diseño, queremos que el eco de un pulso llegue antes que la transmisión del siguiente pulso de manera que podamos asociarlos al último pulso enviado. Figure 2: Precisamente, enlazando con lo dicho en la figura 1, el alcance máximo que no produce un eco susceptible de ser detectado antes de la siguiente transmisión se denomina alcance máximo no ambiguo 𝑅𝑢 . 2 of 8 Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre Figure 3: El concepto de resolución en alcance nos permite definir la distancia mínima que ha de separar dos blancos diferentes, tgt1 y tgt2 en la figura, para que los podamos distinguir. ∙ la frecuencia de emisión de los pulsos: PRF=1/PRI ∙ el cociente entre la longitud del pulso y la PRI, que llamamos ciclo de trabajo (duty cycle en inglés) y que nos dice la fracción sobre 1 de tiempo durante la cual el radar transmite 𝜏 𝑃 𝑅𝐼 𝑑𝑡 = (2) El ciclo de trabajo nos permite relacionar también la potencia transmitida de pico y la potencia transmitida promedio: 𝑃𝑎𝑣 = 𝑃𝑝 ⋅ 𝑑𝑡 (3) ∙ el alcance máximo no ambiguo, 𝑅𝑢 , que corresponde a la distancia máxima a la que puede estar situado un blanco sin que su eco llegue al radar después de que este haya enviado otro pulso: 𝑅𝑢 = 𝑐 𝑃𝑃𝐼 2 (4) Vemos que, de nuevo, aparece el término 1/2 a causa de que la distancia al blanco es la mitad del camino recorrido por el pulso. 1.3 Resolución en alcance Si dos blancos se encuentran muy cerca uno del otro, entonces los ecos de los dos pulsos nos llegarán como un pulso único, más largo que el que hemos enviado. Pero del hecho de su mayor longitud no podemos concluir que se trate de un eco procedente de dos blancos diferentes, ya que un blanco extendido con dimensiones suficientemente grandes también produce un pulso más largo, de modo que ambas situaciones son indistinguibles. Por tercera vez, aplicamos la sencilla fórmula espacio=velocidad x tiempo con la presencia del factor 1/2 para concluir que la llamada resolución en alcance (=capacidad de distinguir entre dos blancos separados por ese valor en distancia), Δ𝑅, es Δ𝑅 = 𝑐𝜏 2 3 of 8 (5) Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre donde 𝜏 , al igual que en (2), es la duración o longitud del pulso. En muchas ocasiones la discriminación en la llegada de los pulsos se hace en dominio de frecuencia (ya lo veremos, por ejemplo, en la técnica llamada de compresión de pulsos), de manera que tenemos que hacer uso de que 𝜏 = 1/𝐵, donde 𝐵 es la anchura de banda procesada, y por tanto (5) queda como Δ𝑅 = 2 𝑐 2𝐵 (6) El efecto Doppler Frente a los radares dedicados a la determinación de la distancia o alcance del blanco tratada en la sección 1, tratamos ahora de aquellos radares que pretenden determinar la velocidad del blanco sin importarles su posición, como los de tráfico 3 . El efecto Doppler es un fenómeno que se estudia en Física General asociado a ondas continuas. En nuestro caso queremos considerar el caso de radares pulsados, aun sin descartar que, cuando nuestro objetivo sea detectar solamente velocidad, no descartamos el uso de radares de onda continua, también llamados CW (Continuous Wave). Sin embargo, la inclusión en nuestro estudio de radares pulsados nos lleva a ampliar el ámbito de observables físicos que se ven afectados por el efecto Doppler, como enseguida veremos. Recordamos primero que el efecto Doppler es básicamente la aproximación de los frentes de onda de una señal emitida por un emisor en movimiento por delante del blanco 4 y su separación por detrás, como se ve en la figura. El efecto es idéntico si el sensor permanece quiero y lo que se mueve es el blanco 5 . Pero si nuestro sistema es pulsado este mismo fenómeno se aplicará a la PPI y a la duración del pulso: la separación entre pulsos parecerá inferior por delante del emisor en movimiento (cuando se emite el pulso 𝑛 + 1 ya se está más cerca del blanco que cuando se emitió el 𝑛-ésimo, de manera que la separación en el aire entre ambos pulsos consecutivos es inferior) y mayor detrás, y la duración parecerá igualmente menor por delante y mayor por detrás. Por tanto, tenemos las siguientes ecuaciones, para una velocidad radial 𝑣 -con su signo implícito- del sensor o del blanco: 𝑐+𝑣 𝑓0 𝑐−𝑣 𝑐+𝑣 𝑃 𝑅𝐹 𝑃 𝑅𝐹 = 𝑐−𝑣 𝑐−𝑣 𝜏′ = 𝜏 𝑐+𝑣 𝑓0′ = (7) donde 𝑓0 , 𝑓0′ =frecuencia central de la señal, transmitida y recibida, respectivamente 6 , y donde vemos que, lógicamente, tiempos y frecuencias se transforman inversamente. Las variable primadas son siempre las recibidas y las no primadas las transmitidas. Puede que en ocasiones se conozca la velocidad del blanco pero no la velocidad radial, de modo que sea necesario saber el ángulo entre la dirección que une el blanco y el sensor y la dirección de movimiento, 𝜃, de modo que 𝑣 = 𝑣blanco cos 𝜃. 3 Ecuación radar La intensidad de señal que le llega al receptor viene dada por la siguiente ecuación, que llamamos ecuación radar, y que damos aquí para el caso denominado monoestático, y que corresponde a utilizar la misma antena 3 Existen radares, lógicamente, que pretenden determinar ambas cosas. De momento, estamos haciendo una aproximación introductoria, y consideramos casos básicos pero que constituyen los bloques de construcción de conceptos y sistemas más complejos. 4 Entendemos por delante como la región hacia la que se mueve el emisor y por detrás aquella que va dejando detrás. 5 En Mecánica clásica el efecto no era completamente indistinguible si era el blanco o era el sensor el que se movía. Nosotros utilizaremos, sin demostrarla, la fórmula relativista, en la que esa equivalencia se respeta 6 Es la misma fórmula para cualquier frecuencia presente, y por tanto para todo el ancho de banda, que aparecerá desplazado y modificado según sea el valor de la 𝑣. Otra aclaración de interés, vinculada a esto, es que, aunque este efecto se denomina desplazamiento Doppler (Doppler shift), matemáticamente no es un desplazamiento sino una homotecia, ya que viene dado por un producto sobre la 𝑓0 y no de una suma con𝑓0 4 of 8 Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre Figure 4: Un blanco que se acerca provoca un aumento en la frecuencia detectada (una longitud de onda menor) y uno que se aleja una frecuencia menor (una longitud de onda mayor). para transmitir y para recibir: 𝑃𝑟 = 𝑃𝑡 𝐺2 (𝜃, 𝜙)𝜆2 𝜎 (4𝜋)3 𝑅4 𝐿 (8) donde ∙ 𝑃𝑡 = densidad de potencia transmitida [Watt/m2 ] ∙ 𝑃𝑟 = densidad de potencia recibida [Watt/m2 ] ∙ 𝐺(𝜃, 𝜙) es la ganancia de la antena, que es en general una función del ángulo tridimensional de mira, dado por (𝜃, 𝜙) 7 [-] ∙ 𝜆 es la longitud de onda de la señal (sería un término variable en el caso de una antena de banda ancha) ∙ 𝜎 se llama sección recta radar es una médida con unidades de área que nos dice que superficie ofrece el blanco, medida en la “moneda de cambio” de una superficie metálica perfectamente reflectiva colocada perpendicularmente a la dirección de incidencia de la señal (p. ej., si tenemos una superficie de 1 m2 de un material que solamente refleja la mitad de la onda que recibe, entonces su sección recta radar será de 0.5 m2 ; si además está colocada en un ángulo √ de 45 grados con respecto a la dirección incidente, entonces la onda solamente “ve” una fracción 1/ 2 -que es el coseno de 45 gradosde la superficie, que √ ya de por sí “valía” 0.5 m2 , lo que resulta en una sección recta radar de 1/(2 2) m2 ) ∙ 𝑅 es el alcance o distancia al blanco ∙ 𝐿 son las pérdidas del sistema [-], que pueden ser de muchos tipos: en el hardware, durante el procesado, por atenuación atmosférica (las llamadas pérdidas básicas de propagación en el espacio libre están incluidas en la ecuación radar a través del (4𝜋𝑅)2 /𝜆2 ímplicito, que aparece como 𝑅4 debido al doble camino). Vemos que dimensionalmente, la ecuación da [Watt/m2 ] en ambos lados. En la ecuación radar se puede poner como en (8) podemos tener en cuenta que un receptor solamente puede detectar la presencia de un eco si se supera un cierto nivel de señal, que suele ser del orden de , y de acuerdo 7 Este par de ángulos se refieren normalmente a los llamados elevación y acimut, que no son los mismos que los ángulos de esféricas, llamado uno polar y el otro azimut también, auque es otro acimut. En el sentido dado aquí, elevación sería el ángulo polar 2-D sobre el plano 𝑋𝑍, suponiendo que el eje 𝑍 es el eje, que llamamos de simetría o boresight y el eje 𝑌 indica la vertical, mientras que el acimut sería el ángulo polar 2-D en el plano 𝑌 𝑍. 5 of 8 Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre a ese nivel, 𝑆min , habrá una distancia máxima a la que se puede detectar un blanco de una cierta 𝜎, según la ecuación que resulta de despejar el alcance de (8): 𝑅max = ( 𝑃 𝐺2 (𝜃, 𝜙)𝜆2 𝜎 ) 𝑡 (4𝜋)3 𝑆min 𝐿 (9) Lo que ocurre es que en (9) hemos usado el término 𝑆min como límite de detección, sin tener en cuenta que el ruido puede afectarlo. Si lo hacemos, hablaremos de que existe una cierta cantidad de ruido superpuesta a la señal, descrita como relación de señal-ruido o SNR (=potencia de señal (𝑃𝑠 )/potencia de ruido (𝑃𝑛 )) a la salida del receptor que vendrá dada por la relación señal ruido a la entrada del receptor modificada por un cierto factor que llamamos figura de ruido, 𝐹 , SNRout = 𝐹 SNRin 𝑆min = 𝑃𝑛,𝑜𝑢𝑡 × 𝐹 SNR𝑖𝑛 (10) El ruido del sistema, 𝑃𝑛,𝑜𝑢𝑡 , suele ser principalmente de origen térmico, de manera que ponemos 𝑃𝑛,out = 𝑘Boltzmann 𝑇 𝐵 (11) donde 𝑘B = 1.38 × 10−23 [Jul/Kelvin] es la constante de Boltmann, 𝑇 es la temperatura media del sistema en grados Kelvin y 𝐵 el ancho de banda procesado. Si el ruido no fuese solamente térmico, siempre podemos medirlo en unidades de ruido térmico equivalente (aplicamos de nuevo la idea de tener una moneda de cambio) y poner 𝑃𝑛,𝑜𝑢𝑡 = 𝑘B 𝑇𝑒 𝐵 (12) donde 𝑇𝑒 pasa a ser la temperatura equivalente del sistema. Poniendo todas estas consideraciones juntas, se obtiene la siguiente relación para la distancia máxima de detección 𝑅max = ( 𝑃𝑡 𝐺2 (𝜃, 𝜙)𝜆2 𝜎 3 (4𝜋) 𝑘B 𝑇𝑒 𝐵 𝐹 SNRin ) 𝐿 (13) A veces se expresa también la potencia transmitida 𝑃𝑡 en función de la potencia de pico y el ciclo de trabajo sustituyendo 𝑃𝑡 por 𝑃𝑝 × 𝑑𝑡 = 𝑃𝑝 × (1 − 𝜏 × 𝑃 𝑅𝐹 ). En otras ocasiones se define también el ciclo de trabajo en recepción 𝑑𝑟 ≡ (𝑃 𝑃 𝐼 − 𝜏 )/𝑃 𝑃 𝐼 y se introduce en las expresiones. Hay que tener en cuenta que la ecuación radar tal y como la hemos visto no es universal, sino su forma más básica, y que radares con métodos de procesado complejos requieren sustituirla o añadirle elementos nuevos. En este momento, nosotros trabajamos con la forma expresada aquí, que contiene suficientes elementos para entender el sentido y utilidad de cualquier ecuación radar. 4 Ejercicios a realizar Se pide lo siguiente: 1. Escribir una colección de funciones, en un solo fichero .m de Matlab, que calculen: (a) el alcance de un blanco conociendo el retardo, (b) el alcance máximo no ambiguo conociendo la PRF, (c) la resolución en alcance de un radar conociendo: la longitud del pulso o bien el ancho de banda, dejándole al usuario la opción de elegir si se prefiere dar el dato de la primera o del segundo 2. Escribir otra colección de funciones, de nuevo en un solo fichero .m de Matlab, que calculen: (a) el desplazamiento Doppler 𝑓0′ −𝑓0 de una determinada frecuencia, para una determinada velocidad del blanco (o el sensor, o la relativa entre los dos), y el ángulo 𝜃 (b) la variación de la PPI, de acuerdo a los mismos factores, 6 of 8 Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre (c) la variación en la longitud del pulso 3. Escribir una tercera colección de funciones, en un solo fichero .m de Matlab, que calculen: (a) la densidad de potencia recibida de acuerdo a la ecuación (8), con todos sus parámetros como variables de entrada; hágase tanto en unidades naturales como en dB’s para los términos que son de potencia (b) el alcance máximo de un blanco de acuerdo a la ecuación (13), con todos sus parámetros como variables de entrada; hágase tanto en unidades naturales como en dB’s para los términos que son de potencia. Estas funciones deben estar documentadas dentro del código y se pide también un pequeño documento en que se describa algún caso de test sobre el que se haya aplicado, tomando valores razonables para los parámetros de input. 5 Apéndice Estamos acostumbrados a escribir funciones en Matlab dentro de ficheros .m que tienen el mismo nombre que el fichero. Aunque se definan funciones adicionales dentro del fichero serán de uso y acceso únicamente interno, desde dentro de la función principal o de otra de las secundarias. Estas funciones locales pueden definirse al final de la función principal, siguiendo el patrón % This f u n c t i o n d e m o n s t r a t e s t h e u s e o f non−embedded f u n c t i o n s function y = f ( x ) y=x^2+g ( x ) ∗ h ( x ) ; function y = g ( x ) y = 0.5+ x ; function y = h ( x ) y = 0.5∗x ; o anidadas dentro de la función principal % This f u n c t i o n d e m o n s t r a t e s t h e u s e o f embedded f u n c t i o n s function y = f ( x ) y=x^2+g ( x ) ∗ h ( x ) ; function y = g ( x ) y = 0.5+ x ; end function y = h ( x ) y = 0.5∗x ; end end En ninguno de los dos casos tenemos acceso a las funciones g y h desde fuera del fichero >> g ( 2 ) ??? Undefined command/ function ’ g ’ . 7 of 8 Introducción al radar Due: 28 Febrero Radiodeterminación ITT 2o Cuatrimestre Sin embargo, es posible definir las funciones anidadas como elementos de una estructura, nombradas con un punto después del nombre la misma y que sí pueden utilizarse fuera del fichero si es la estructura la que se devuelve como output de la función principal que da nombre al fichero .m: % This f u n c t i o n d e m o n s t r a t e s t h e u s e o f s t r u c t u r e s o f f u n c t i o n s function y = f ( ) y . g=@g ; y . h=@h ; function y = g ( x ) y = 0.5+ x ; end function y = h ( x ) y = 0.5∗x ; end end Entonces tendremos acceso a las funciones a través de >> f u n c i o n T e s t=f % e s i n d i s t i n t o a u s a r f u n c i o n T e s t=f ( ) funcionTest = g : @g h : @h >> f u n c i o n T e s t . g ( 2 ) ans = 3.5000 >> f u n c i o n T e s t . h ( 2 ) ans = 1 >> En realidad, en lugar de usar estructuras, podríamos utilizar clases. Sin embargo, las clases no están implementadas de manera hábil en Matlab 7.0 8 , que es la versión que nosotros usamos, de modo que nos quedaremos en el uso de estructuras. 8 En versiones posteriores sí se ha implementado el uso de clases de una manera más semejante al estándar de lenguajes como C++, Ada o Python. 8 of 8