Práctica 2. Formas de onda en radar.
Anuncio

2o Cuatrimestre
Radiodeterminación ITT
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Los sistemas radar emiten señales con unas formas de onda características, diferentes -más simples, en
general- de las que se suelen emplear para modular señales de comunicaciones. Vamos a ver cinco formas
de onda típicas: ondas continuas (CW, Continuos Wave), pulsos monofrecuencia rectangulares, pulsos de
chirp (pronúnciese /𝜖 :/ como “sir ”), formas de onda con código en fase y formas de onda de ráfaga de pulsos
(burst pulse).
La información que puede suministrarnos un radar depende en gran medida del tipo de forma de onda que
utiliza.
1
Características de una forma de onda
Las principales características de la forma de onda de un radar son:
∙ Energía de la misma
∙ Resolución en alcance y en velocidad radial que proporciona
∙ Capacidad de rechazar respuestas indeseadas de blancos presentes en la escena de observación
La energía de la forma de onda del radar viene dada por la integral
∫
𝐸𝑊 = 𝑃 (𝑡) 𝑑𝑡
(1)
donde 𝑃 es la potencia instantánea transmitida por el radar. Dado que estamos entendiendo como forma de
onda la gráfica completa de la señal frente al tiempo, incluyendo los momentos de silencio, tenemos que (1)
es equivalente a
𝐸𝑊 = 𝑃𝑃,𝑒 𝜏
(2)
donde 𝑃𝑃,𝑒 es la potencia de pico eficaz 1 transmitida y 𝜏 es la duración del pulso en cada ciclo (si el radar
fuese en onda continua, 𝜏 es igual al ciclo de funcionamiento que consideremos, ya matizaremos esto).
Si la forma de onda consta de varios subpulsos, tenemos
∑ (𝑛)
𝐸𝑊 =
𝑃𝑃,𝑒 𝜏𝑛
(3)
𝑛
donde 𝜏𝑛 es la duración del subpulso.
La energía es un factor muy relevante que está relacionado con la capacidad de transmisión de potencia
del sistema, su ciclo de trabajo máximo de operabilidad (tanto por consideraciones de hardware y de calentamiento térmico del sistema como porque es necesario que el radar esté en silencio -en fase que llamamos
de gating- para poder escuchar los ecos), y la resolución en alcance -de la que hablaremos a continuación.
La resolución del radar en alcance hemos visto que es
𝛿𝑅 =
𝑐𝜏
2
(4)
que habíamos visto también admitía una forma en función del ancho de banda 𝐵. Hemos sustituido el signo
Δ por 𝛿 para recalcar que hablamos de resolución y no de una resta cualquiera. En cuanto a la resolución
del radar en velocidad radial, no la obtuvimos pero es inmediato de
𝑓0′ =
𝑐+𝑣
𝑓0
𝑐−𝑣
(5)
1 Ya veremos que la potencia de pico eficaz es diferente a la de amplitud. Realmente, ya conocemos esta diferencia para
ondas sinusoidales, para las cuales hay un factor de reducción de 1/2 de la primera con respecto a la segunda
1 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
que
Δ𝑓 ≡ 𝑓0′ − 𝑓0 =
2𝑣
2𝑣
𝑓0 ≃
𝑓0
𝑐−𝑣
𝑐
(6)
y, por tanto, por cálculo de errores, tras despejar 𝑣
𝑣=
𝑐Δ𝑓
𝜆0 Δ𝑓
=
2𝑓0
2
(ya que 𝜆0 =
𝑐
)
𝑓0
(7)
obtenemos que
𝜆0 𝛿Δ𝑓
(8)
2
donde simplificamos la notación de 𝛿Δ𝑓 como 𝛿𝑓 . ¿Qué significa 𝛿𝑓 ? Es la capacidad de distinguir un
cierto desplazamiento Doppler. Nosotros medimos un cierto desplazamiento Doppler y de ahí inferimos la
velocidad del blanco, pero nuestra capacidad de discernir dicho desplazamiento no es infinitamente buena.
Lo hacemos mediante el uso de filtros de hardware y procesado, con un error 𝛿𝑓 .
𝛿𝑣 =
En cuanto a la capacidad de evitar blancos no deseados, es un aspecto que trataremos posteriormente
y en diversos sitios.
2
Ondas continuas (CW)
Cuando un radar transmite de manera continua, ha de tener dos antenas ya que necesita una para transmitir
y otra para recibir. Un radar pulsado, sin embargo, solamente necesita una antena, ya que existen períodos
de silencio durante los cuales la antena que transmite puede ser utilizada para recibir.
La onda continua transmitida puede ser monofrecuencia o puede estar modulada en frecuencia de una
cierta manera, típicamente siguiendo una variación lineal (LFM, Linear Frequency Modulation). La forma
matemática de una LFM-CW es
𝑘 2
𝑡 )] 0 ≤ 𝑡 < 𝑇
2
𝑠(𝑡) = 𝑠(𝑡 − 𝑛 𝑇 ) 𝑛𝑇 ≤ 𝑡 < (𝑛 + 1)𝑇
𝑠(𝑡) = 𝐴 cos[2𝜋(𝑓0 𝑡 +
(9)
donde 𝑘 es la rampa de la frecuencia.
Si utilizamos un radar CW monofrecuencia no nos será posible detectar el alcance de un blanco, pero sí su
velocidad. Sin embargo, con un LFM-CW, 𝑇 hace el papel del intervalo interpulso (PPI) y sí será posible
hacerlo, aunque existirá un rango máximo no ambiguo, igual que para un radar pulsado, dado por
𝑅𝑢 = 𝑐
𝑇
2
(10)
.
Pero utilizar un LFM-CW no es la única manera de obtener medidas de alcance con un CW. También
podemos utilizar esquemas multifrecuencia. Por ejemplo, podemos transmitir dos señales monofrecuencia y
mezclar sus ecos heterodinamente en recepción. La diferencia de fase entre las dos señales, que son del tipo
𝑠1 (𝑡) = 𝐴 cos(2𝜋𝑓1 𝑡)
𝑠2 (𝑡) = 𝐴 cos(2𝜋𝑓2 𝑡)
(11)
que nos llegan como
𝑠1 (𝑡) = 𝐴 cos(2𝜋𝑓1 𝑡 + 𝜙1 );
𝑠2 (𝑡) = 𝐴 cos(2𝜋𝑓2 𝑡 + 𝜙2 );
2 of 15
4𝜋𝑓1 𝑅
𝑐
4𝜋𝑓2 𝑅
𝜙2 + 2𝜋𝑛2 =
𝑐
𝜙1 + 2𝜋𝑛1 =
(12)
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
donde 𝑛1 y 𝑛2 son los responsables de que no podamos averiguar 𝑅 a partir de 𝜙1 o 𝜙2 por separado, será
4𝜋(𝑓2 − 𝑓1 )𝑅
𝑐
Δ𝜙 = 𝜙2 − 𝜙1
Δ𝜙 + 2𝜋(𝑛2 − 𝑛1 ) =
(13)
De nuevo, parece que los 𝑛𝑖 ; 𝑖 = 1, 2 nos impiden recuperar 𝑅. Sin embargo, bajo la condición de que
𝑛1 = 𝑛2 , tendremos que
4𝜋(𝑓2 − 𝑓1 )𝑅
𝑐Δ𝜙
Δ𝜙 =
⇒𝑅=
(14)
𝑐
4𝜋Δ𝑓
La condición 𝑛1 = 𝑛2 será cierta dentro de una cierta distancia. En efecto, si estamos en el punto justo
delante del radar (𝑅 → 0), entonces tenemos que 𝜙1 = 𝜙2 , en concreto 𝜙1 = 𝜙2 = 0 y, por tanto, también
𝑛1 y 𝑛2 son cero. Si estamos a una distancia pequeña, inferior a 𝑐𝑇1 /2 = 𝑐/(2𝑓1 ) y 𝑐𝑇2 /2 = 𝑐/(2𝑓2 ) -donde
𝑇𝑖 ; 𝑖 = 1, 2 son los periodos de las sinusoides y 1/2 se debe al efecto de camino de ida y vuelta-, entonces los
desfases 𝜙1 y 𝜙2 serán ambos inferiores a 2𝜋 y, por tanto, 𝑛1 = 𝑛2 = 0. De hecho, la condición que pusimos
como 𝑛1 = 𝑛2 , para que sea útil, estamos viendo que es realmente 𝑛1 = 𝑛2 = 0. Si nos vamos demasiado
lejos del blanco, tal que 𝑛1 = 𝑛2 pero 𝑛1 = 𝑛2 ∕= 0, entonces la diferencia de fase volverá a ser la que era
cuando 𝑛1 = 𝑛2 = 0, es decir, a una distancia inferior. ¿Significa eso que (14) no es cierta para 𝑛1 = 𝑛2 ∕= 0?
¿Dónde está el truco? Lo que ocurre es que si 𝑅 es demasiado grande, entonces Δ𝜙 será mayor que 2𝜋,
pero nosotros medimos la fase entre 0 y 2𝜋 nada más (lo que se llama la fase enrollada), de manera que
la implicación en (14) no es cierta, aunque sí lo sea la ecuación a su izquierda. De todo esto concluimos
que la ecuación de alcance máximo no ambiguo que vimos, y que estaba referida a formas de onda pulsadas
implícitamente no es válida y ha de ser sustituida por
𝑅𝑢 =
𝑐
2Δ𝑓
(15)
para radares CW bifrecuencia. Esto se puede generalizar a radares multifrecuencia con más de dos frecuencias.
En cuanto al cálculo de resolución en alcance, tendremos que para un radar LFM-CW, su cálculo también
difiere de lo visto para el caso general pulsado que vimos el otro día. Así, la detección con un LFM-CW
también se hace mezclando heterodinamente la señal del eco con la transmitida, de manera que la señal
mezclada será
𝑠ℎ = 𝑠𝑡 − 𝑠𝑟 = 𝐴 cos[2𝜋(𝑓0 𝑡 +
𝑘 2
𝑘
𝑡 )] × 𝐵 cos[2𝜋(𝑓0 (𝑡 − Δ𝑡) + (𝑡 − Δ𝑡)2 )]
2
2
(16)
donde 𝑅 = 𝑐Δ𝑡/2 como ya sabemos. La frecuencia fundamental de 𝑠ℎ la llamamos frecuencia de batido y
será 𝑓𝑏 = 𝑘Δ𝑡 2 . El alcance del blanco vendrá dado entonces por
𝑅=
𝑐𝑓𝑏
2𝑘
(17)
y la resolución vendrá dada por nuestra capacidad de discernir frecuencias 𝛿𝑓
𝛿𝑅 =
𝑐 𝛿𝑓𝑏
2𝑘
(18)
.
Si el blanco no fuese estacionario, entonces la 𝑓𝑏 llevaría incluido el término de desplazamiento Doppler, que
no hemos tenido en cuenta. En este caso tendríamos una ambigüedad manifiesta, y no podríamos qué parte
de la frecuencia de batido se debe a la distancia al blanco y qué parte a su movimiento. Es posible, no
2 Como sabemos, al mezclar dos señales (como producto) obtenemos una suma de dos componentes, una con la frecuencia
suma y otra con la frecuencia diferencia de las dos que estamos mezclando. En la mezcla heterodina nos quedamos con la
diferencia de 𝑓0 + 𝑘(𝑡 + Δ𝑡) y 𝑓0 + 𝑘𝑡 en este caso particular.
3 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
obstante, diseñar un radar cuya forma de onda CW es ascendente (𝑘, suponemos 𝑘 > 0) durante un tiempo
𝑇 /2 y descendente durante los siguientes 𝑇 /2 segundos (−𝑘). No entramos, sin embargo, en detalle, sino
que lo dejamos como un ejercicio opcional.
La energía asociada a una CW monofrecuencia será la de su valor de pico eficaz, ya que no tiene sentido
hablar de 𝐸𝑊 en general. Si tenemos una LFM, se tomará como PRI el valor de 𝑇 .
2.1
Ejercicios
Se pide lo siguiente:
1. Escribir una función de Matlab que calcule, para un radar CW (cada uno de los tipos aquí vistos):
(a) el alcance de un blanco,
(b) el alcance máximo no ambiguo,
(c) la resolución en alcance y/o velocidad radial
Explíquese el código con un encabezamiento y con comentarios en las líneas pertinentes. Ejemplo:
function [ nq , xq , wq ] = quad1 ( n e l , node , xc )
%
% [ nq , xq , wq ] = quad1 ( n e l , node , xc )
%
% QUAD1 s e t s up a one p o i n t q u a d r a t u r e r u l e .
%
% NEL, t h e number o f e l e m e n t s ;
% NODE, t h e nodes t h a t b e l o n g t o each e l e m e n t ;
% XC, t h e l o c a t i o n o f t h e nodes .
%
% NQ, t h e number o f q u a d r a t u r e p o i n t s p e r e l e m e n t :
% XQ, t h e l o c a t i o n o f t h e q u a d r a t u r e p o i n t s ;
% WQ, t h e q u a d r a t u r e w e i g h t .
%
% Example o f u s e : quad1 ( 5 , [ [ 1 , 3 ] ; [ 2 , 3 ] ; [ 4 , 1 ] ; [ 3 , 4 ] ; [ 5 , 2 ] ] , [ 1 , 2 , 3 , 4 , 5 ] )
nq = 1 ;
%
% S e t t h e l o c a t i o n o f t h e q u a d r a t u r e p o i n t ( s ) i n each e l e m e n t .
%
f o r i t = 1 : n e l %i t l o o p s t h e whole s e t o f e l e m e n t s
i p 1 = node ( i t , 1 ) ; %i t r e a d s t h e f i r s t p a r t o f t h e node
i p 2 = node ( i t , 2 ) ; %i t r e a d s t h e s e c o n d p a r t o f t h e node
x1 = xc ( i p 1 ) ; %i t r e a d s t h e c o n t e n t o f xc a t i p 1
x2 = xc ( i p 2 ) ; %i t r e a d s t h e c o n t e n t o f xc a t i p 2
xq ( i t , 1 ) = ( x1+x2 ) / 2 . 0 ; %i t computes t h e mean v a l u e o f x1 and x2
end
2. (Opcional) Calcúlese el alcance 𝑅 y la velocidad radial 𝑣 de un blanco con un radar que use una forma
de onda LFM-CW triangular (𝑘 > 0 para 𝑡 ∈ [0, 𝑇 /2) y −𝑘 para 𝑡 ∈ [𝑇 /2, 𝑇 /2)) a partir de las medidas
de las frecuencias de batido durante la fase ascendente (𝑓𝑏𝑢 ) y descendente (𝑓𝑏𝑑 ).
2.2
Ejemplos de aplicación
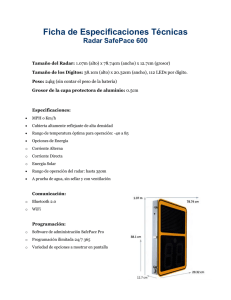
∙ Sea un radar bifrecuencia, por ejemplo, con frecuencias en 135 MHz y 144 MHz. ¿Qué conclusiones
extraemos del resultado? ¿Es un buen resultado? ¿Qué podemos hacer para mejorarlo? Además,
encuéntrese en la tabla adjunta a qué banda correspoden dichos valores.
4 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 1: Bandas de frecuencias radar.
∙ Se puede calcular el alcance de un blanco que produce una frecuencia de batido de 1200 Hz en un
radar LFM-CW con 𝑘 = 10 MHz⋅s−1 y en uno con 𝑘 = 20 MHz⋅s−1 . Compárense las ventajas e
inconvenientes de uno respecto al otro.
∙ Considérese un radar LFM-CW con una “PRF” de 300 Hz (a veces, a la PRF la llamamos en este
contexto frecuencia de modulación porque PRF es un nombre que se le da por similitud con la función
que desempeña como parámetro con lo que ocurre en los radares pulsados; como aquí no tenemos pulsos
realmente -aunque podríamos pensar en que son pulsos cuya longitud es igual a la PRI- podemos preferir
el término frecuencia de modulación 𝑓𝑚 ) y un ancho de banda (o frecuencia barrida de 50 MHz. ¿Qué
diferencias en la frecuencia de batido se producen si incrementamos el alcance en “pasos” de 10 o de
15 metros?
∙ (Opcional) Para el caso de un radar LFM-CW triangular que nos dé la capacidad de resolver tanto la
posición como la velocidad del blanco, tenemos el ejemplo de un radar que trabaja con una longitud
de onda de 𝜆 = 3 cm y un ancho de banda Δ𝑓 =200 KHz, siendo la PRI de 20 ms. Si detectamos
una frecuencia de batido de 63 1/3 kHz durante el up-chirp y de 30 kHz durante el down-chirp, ¿a qué
distancia se encuentra y con qué velocidad radial se mueve el blanco?
5 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
3
Radares pulsados
Los radares pulsados transmiten y reciben un tren de pulsos modulados. El alcance de un blanco se calcula
como hemos explicado hasta ahora: como el resultado de calcular el recorrido de la señal en el camino de
ida y vuelta de los pulsos al blanco. Un desplazamiento Doppler se debe igualmente en una velocidad radial
relativa entre el blanco y el radar. Los cuatro parámeros fundamentales que definen la señal de un radar
pulsado son las siguientes:
∙ la frecuencia de la portadora
∙ la longitud del pulso
∙ la modulación del pulso
∙ la PRF
A continuación vamos a estudiar diferentes modulaciones.
3.1
Pulsos Monofrecuencia Rectangulares
Es la forma más simple, y la que emplearon los primeros sistemas de radar. Son fáciles de generar en el
transmisor y sencillos de procesar. A menudo se denominan pulsos CW (no se confundan con las formas
CW totalmente continuas)
La detección de un eco en el caso de los radares CW hemos visto que se realiza mezclando la señal recibida
por el radar con una réplica de la señal enviada que circula internamente en la cadena de recepción del
radar, es decir, una copia de la señal que, en lugar de ir a la antena se mezcla con las señales que lleguen
al radar en recepción. En el caso de los radares pulsados el mecanismo es diferente: la señal se filtra. Si
bien modernamente este filtrado se realiza digitalmente, es decir, una vez que la señal se ha muestreado
y convertido en un registro digital, en este momemto vamos a obviar cómo se realiza este filtrado, ya
sea digitalmente como acabamos de decir, o analógicamente, es decir, mediante circuitos de microondas
implementados directamente como hardware. Lo importante es que se puede demostrar que la respuesta
ideal del filtro implementado en el radar para que el impacto del ruido presente en la señal afecte lo menos
posible a la detección del eco se llama filtro adaptado y corresponde a una respuesta en frecuencia que
corresponde exactamente a la transformada de Fourier del perfil del pulso que se envía invertido en tiempo.
Recordando los principios matemáticos implícitos en el filtrado y en la matemática de Fourier tenemos lo
siguiente:
∙ el resultado en el dominio de tiempo de un filtrado de una señal es la convolución de la señal 𝑠(𝑡) con
la respuesta impulsional del filtro ℎ(𝑡);
∙ consecuentemente, el resultado en el dominio de tiempo es el producto de sus transformadas de Fourier
𝑆(𝑓 ) y 𝐻(𝑓 )
∙ la convolución de dos funciones 𝑓1 (𝑡) y 𝑓2 (𝑡) es equivalente a la correlación entre 𝑓1 (𝑡) y 𝑓2 (−𝑡) si
ambas son reales
llegamos a las siguientes conclusiones
∙ la aplicación de un filtro adaptado, tal y como se ha descrito arriba, es equivalente a correlar el eco
con una réplica de la señal,
∙ esperamos que la mejor manera de reconocer este pulso recibido como eco sea precisamente el buscar
su similitud o correlación con la forma que tiene.
Es decir, que hemos demostrado mediante argumentos matemáticos, pero sin introducir ecuaciones, que,
efectivamente, si definimos filtro adaptado como aquel que maximiza la detección, entonces la “respuesta
6 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
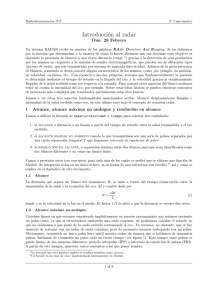
Figure 2: Pulso CW y su espectro.
en frecuencia que corresponde exactamente a la transformada de Fourier del perfil del pulso que se envía
invertido en tiempo” corresponde a dicho filtro. El resultado de la señal filtrada por un filtro adaptado se
denomina pulso comprimido.
Nos queda por analizar la otra faceta de la detección radar: la de detección de velocidad radial. El pulso
que vuelve como eco puede haber sufrido un cierto desplazamiento en su frecuencia de portadora, que para
el caso de esta sección hemos supuesto constante. Habrá, por tanto, que tener en cuenta esta posibilidad a
la hora de filtrar. Si solamente filtramos de acuerdo a una respuesta impulsional que es la transformada de
Fourier invertida en tiempo de la señal enviada, no reconoceremos bien el eco si este llega con una frecuencia
de portadora desplazada por el Doppler. Por tanto, en este caso implementaremos un banco de filtros, es
decir, un conjunto de filtros paso-banda definidos por valores centrales de frecuencia que incluyen un cierto
espectro. Para saber cuál es ese espectro, debemos tener una expectativa previa de cuál es el Doppler máximo
que consideramos posible.
Es importante darse cuenta de que tenemos que revisitar nuestras definiciones de resolución en alcance y
velocidad, ya que hasta ahora habíamos manejado conceptos que no incluían la manera de cómo procesábamos
nuestros ecos. Habíamos dicho que, por ejemplo, la resolución en alcance dependía de la longitud del pulso,
tras lo cual se encontraba el caso de dos ecos que llegan tan juntos que están solapados que no sabemos si
corresponden a un solo blanco o a dos (si los blancos solamente pudiesen ser puntuales podríamos obtener
esa información por la longitud del eco, pero no lo son, de manera que podría tratarse de un solo blanco muy
largo en la dirección radial); además la palabra resolución tiene otras implicaciones, ya que nos habla no
solamente de la capacidad de resolver dos blancos diferentes sino de con qué exactitud sabemos a qué distancia
se encuentra nuestro blanco, suponiendo que sea sólo uno. En cualquier caso, en nuestra introducción no
fuimos más precisos que la mera mención de que hemos detectado el eco del pulso con un cierto retardo o
que hemos detectado un cierto desplazamiento Doppler. Más arriba, ya sí empezamos a serlo al hablar de
radar de onda continua, ya que hablamos de que nuestra detección se realizaba como una mezcla heterodina
del eco y la señal enviada. Ahora estamos hablando de detección por convolución de pulsos y es momento
de ver cómo compromete eso nuestros conceptos de resolución.
Lo primero que vamos a hacer es analizar nuestro pulso monofrecuencia rectangular o pulso CW (siendo
conscientes de la yuxtaposición de las palabras pulso y CW, de manera que no hablamos de radar CW en el
sentido de la sección anterior).
Por tanto, se pide
3. realizar un programa en Matlab que genere, dibuje y calcule el espectro de dicho pulso (ver figura 2),
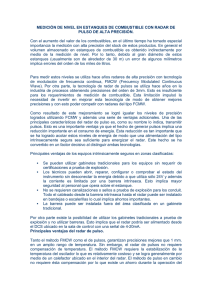
4. incluir posteriormente código Matlab que realice el mismo análisis para un tren de pulsos (ver figura 3)
5. realizar un programa que comprima el eco de un pulso filtrando el eco; el input de este programa es el
7 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 3: Tren de pulsos CW y su espectro.
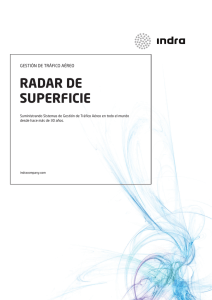
Figure 4: Convolución en tiempo de un pulso CW.
eco y el output la convolución del mismo en tiempo (ver figura 4) y en frecuencia (ver figura 5)
6. introdúzcanse diferentes retardos y diferentes desplazamientos Doppler y obsérvense las respuestas
comprimidas
Retomando el asunto de las resoluciones, se define como resolución en alcance la semianchura de la forma
de la respuesta óptima para un eco retardado. Es decir, que asignamos como momento de llegada del eco
aquel que corresponde al centro de la respuesta triangular en la figura 4, y ese instante estará sujeto a un
error dado por la citada semianchura (=longitud en el eje de abcisas que corresponde a los puntos en los
que la función, a cada lado, vale la mitad del valor de pico). Además si tenemos dos blancos, tendremos
una respuesta comprimida que consistirá en dos triángulos superpuestos del tipo de los de la citada figura.
Si los centros temporales de estos dos triángulos se encuentran a una distancia inferior a la semianchura,
entonces no tenemos dos picos diferenciados (ver figura 6). Lo mismo ocurre para la respuesta en frecuencia
(ver figura 5).
7. calcúlese teóricamente la semianchura, que resulta ser 𝑐𝜏 /2 en tiempo y 1/𝜏 en frecuencia
8. escríbase un código Matlab que produzca la gráfica 7.
Dado que tenemos un tren de pulsos es posible que un eco muy tardío se detecte cuando ya hemos enviado
otros pulsos, de manera que, si estamos partiendo de la base de que los ecos corresponden al último pulso
Figure 5: Convolución en frecuencia de un pulso CW.
8 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 6: Convolución de dos pulsos.
Figure 7: Perfil de ambigüedad de un pulso CW.
9 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 8: Incertidumbre en tiempo.
Figure 9: Incertidumbre en frecuencia.
enviado, esto nos haga creer que tenemos un blanco en una posición cercana, cuando en realidad se encuentra
muy lejos. De este problema ya habíamos hablado en la introducción, y nos llevaba al concepto de alcance
máximo no ambiguo. Ahora estamos adoptando una perspectiva más en detalle, y nos gustaría ver, desde el
punto de vista de nuestras respuestas comprimidas, cómo se manifiesta este fenómeno. La clave está en ver
que la figura 4 se reproduce sobre el eje de tiempos cada PRI, ya que un pulso retrasado 𝛿𝑡 produce la misma
respuesta que uno retrasado 𝛿𝑡+PRI (ver figura 8). Pero en frecuencia tenemos un fenómeno parecido, es
decir, que también pueden aparecer ambigüedades. Supongamos que un blanco se mueve con una velocidad
radial 𝑣 respecto al radar que provoca un desplazamiento Doppler igual a 𝛿𝑓 = 2𝑣𝑓0 /𝑐. La fase de los ecos
de los pulsos está desplazada con respecto a la de las señales originales en una cantidad 𝛿𝑓 𝑡. Sea ahora un
segundo blanco que provoca un desplazamiento 𝛿𝑓 +PRF. La fase de los ecos de los pulsos está desplazada
con respecto a la de las señales originales en una cantidad (𝛿𝑓 + PRF)𝑡, pero los pulsos son idénticos y
coherentes, es decir, que todos empiezan con la misma fase, lo que equivale a decir que PRF𝑡 es un número
entero de 2𝜋’s 3 . Dicho de otra manera, las señal eco 𝑠eco , que están relacionadas con la señal del pulso
emitido 𝑠pulso y entre ellas por
𝑠pulso = 𝐴 cos(2𝜋𝑓0 𝑡)
𝑠eco 1 (𝑡) = 𝑘 𝐴 cos[2𝜋(𝑓0 + 𝛿𝑓 )𝑡]
𝑠eco 2 (𝑡) = 𝑘 𝐴 cos[2𝜋(𝑓0 + 𝛿𝑓 + PRF)(𝑡 − 𝛿𝑡)]
(19)
producen la misma respuesta ya que PRF𝑡 es un número entero de 2𝜋’s. Por tanto, tenemos una ambigüedad
en la detección de la velocidad radial (ver figura 9).
9. Escríbase un código Matlab que represente aproximadamente la figura 10.
3 Esto
es algo sobre lo que no habíamos sido explícitos anteriormente.
10 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 10: Incertidumbre en tiempo.
Figure 11: Forma de onda chirp.
3.2
Pulsos LFM
Un pulso lineal FM viene dado por la siguiente forma matemática
𝑠(𝑡) = rect(𝑡/𝜏 ) 𝐴 cos(2𝜋𝑓0 + 𝑘 2 /2 𝑡2 )
donde
{
rect(𝑥) =
1 si 0 ≤ 𝑥 ≥ 1
0 si ∣𝑥∣ > 1
(20)
(21)
y queda ilustrado en la figura 11. Estos pulsos se denominan habitualmente chirps. Para la detección de los
ecos se emplea el mismo método de convolución que se explicaba para el pulso CW. Sin embargo, ahora el
pulso se decorrela consigo mismo más rápido de lo que lo hacía antes, como se puede entender visualizando
la operación de correlación como la concordancia en el solape de la señal con ella misma cuando desplazamos
la réplica o copia sobre el original. Eso resulta en que la forma de onda resultante tras la operación de
convolución es más estrecha. En concreto, esta anchura, que determina mi capacidad de discernimiento en
tiempo, y por tanto en distancia al blanco, se puede demostrar que es igual a 1/𝐵, donde 𝐵 es el ancho de
banda contenido en el barrido lineal de frecuencias, en concreto 𝐵 = 𝑘 𝜏 . Por tanto, la resolución espacial
que me proporciona la convolución en la recepción del eco de una chirp es
𝛿𝑅 =
𝑐
2𝐵
(22)
La diferencia con la resolución espacial de un pulso CW, es decir, con
𝛿𝑅 =
𝑐𝜏
2
(23)
viene dada por la diferencia entre 1/𝐵 y 𝜏 . Es, pues, costumbre definir el producto de 𝜏 y 𝐵 y llamarlo tasa
de compresión del pulso
PC = 𝜏 𝐵
(24)
11 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 12: Perfil de ambigüedad de un chirp.
Figure 13: Forma de onda de código de fase binario.
Por tanto, si PC=1, tenemos el caso por el cual (22) y (23) son iguales y no tenemos mejor resolución para el
chirp que para el pulso CW. Normalmente, sin embargo, la tasa de compresión es del orden de 106 o mayor
aún, de manera que la resolución espacial que nos da un chirp es mucho mejor que la que nos da un pulso
CW.
Sin embargo, a nivel de la detección de la velocidad radial del pulso, tenemos que un desplazamiento Doppler
me decorrela el eco con respecto a la réplica de manera diferente dependiendo del error en mi posición. Así,
si un blanco está un poco más cerca de lo que mi compresión en tiempo me determina, entonces mi rango de
error en la velocidad no será el mismo que si el error en la determinación de la posición es por exceso. Esto
se ve en la figura 12 frente a la 7. La inclinación de la recta que une los dos extremos de la elipse en 12 es
𝜏 /𝐵. Vemos que esta inclinación es no nula también para el caso de PC=1.
En cualquier caso, definimos como resolución en velocidad la anchura de la zona de incertidumbre dada en
12 en el centro, es decir, como
𝜆
(25)
𝛿𝑣 =
2𝜏
que es la misma fórmula que tenemos para el pulso CW.
4
Formas de onda de pulsos con fase codificada
La idea en esta forma de onda es dividir el pulso en segmentos de pulso con un tono puro cada uno, pero
con saltos de fase entre ellos.
Es habitual que esta modulación sea de tipo binario, es decir, que sea la que se denomina forma de onda de
código de fase binario o, a veces, llamado también invertido, según se ilustra en la figura. La forma de esta
onda binaria comprimida tanto en tiempo rápido como en tiempo lento (es decir, tanto en el intervalo de
tiempo de un solo pulso como en el intervalo de tiempos que incluye todo un tren) es la dada en la figura
14.
12 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 14: Perfil de ambigüedad de un pulso con fase codificada.
Figure 15: Forma de onda de ráfaga de pulsos.
Las resoluciones en distancia y en velocidad radial se puede demostrar que son
𝑐𝜏𝑠
2
𝜆
𝛿𝑣 =
2𝜏
𝛿𝑅 =
(26)
donde 𝜏𝑠 es la longitud de cada subpulso y 𝜏 la del pulso completo, donde 𝜏 = 𝑛𝑠 𝜏𝑠 donde 𝑛𝑠 es el número
de supulsos por pulso. Estos valores corresponden a las anchuras de la compresión mostrada en la figura 14.
5
Formas de onda de ráfaga de pulsos
A veces puede ser necesario desde el punto de vista del hardware o conveniente desde el punto de vista del
procesado dejar una separación 𝜏𝑝 entre los subpulsos, como se ve en la figura.
La resolución es la misma que antes, pero ahora 𝜏 ∕= 𝑛𝑠 𝜏𝑠 sino que 𝜏 = 𝑛𝑠 𝜏𝑝 + 𝜏𝑠 y por tanto mayor. Eso
mejora la resolución en la estimación de la velocidad. Las resoluciones siguen dadas por las ecuaciones
𝑐𝜏𝑠
2
𝜆
𝛿𝑣 =
2𝜏
𝛿𝑅 =
(27)
aunque, como antes, no lo demostramos.
La desventaja es que se producen unas ambigüedades producto de que ahora es como tener una forma de
onda de pulsos de fase codificada subyacente continua pero muestreada, siendo las muestras los subpulsos
reales. Es decir, que eso produce una repetición espectral que se manifiesta en la forma comprimida. Dicho
de otra manera, la correlación pasa de ser mala si solapamos un eco retardado en 𝜏𝑝 /2 a mucho mejor si el
13 of 15
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
Figure 16: Perfil de ambigüedad de una ráfaga de pulsos.
retardo es de 𝜏𝑝 . Estas ambigüedades vienen dadas por las siguientes fórmulas
𝑐𝜏𝑝
2
𝜆
=
2𝜏𝑝
𝑅amb =
𝑣amb
6
Ejercicio
Completar las siguientes tablas
14 of 15
(28)
Práctica 2. Formas de onda en radar.
Due: 10 Marzo
Radiodeterminación ITT
2o Cuatrimestre
15 of 15