REGULACIÓN AUTOMATICA (5)
Anuncio
")
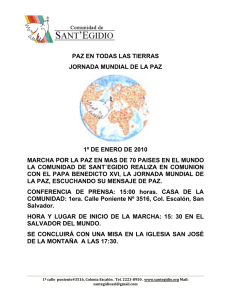
REGULACIÓN AUTOMATICA (5) (Análisis de la respuesta transitoria y estacionaria) Escuela Politécnica Superior Profesor: Darío García Rodríguez 1 1.3.- Obtenga la respuesta escalón unitario de un sistema realimentado unitariamente, cuya función de transferencia en lazo abierto es 4 G (s) = s( s + 5) 4 G(s) s( s + 5) 1 4 1 y ( s) = ·u ( s ) = · = 2 · 4 1 + G( s) s s + 5s + 4 s 1+ s ( s + 5) las soluciones de la ecuación: luego y ( s) = A = lim s →0 s2+5s+4 =0 son -1 y –4 4 A B C = + + s ( s + 1)( s + 4) s ( s + 1) ( s + 4) 4 =1 ( s + 1)( s + 4) B = lim s → −1 4 4 =− s ( s + 4) 3 4 1 = 3 s → −4 s ( s + 1) Las transformadas inversa de Laplace son directa. C = lim 4 1 siempre para t>0. y (t ) = A + Be −t + Ce − 4t = 1 − e −t + e 4t 3 3 En matlab con el comando pulse se tendría la siguiente figura: step(4,[1 5 4]) Es la solución gráfica a la respuesta señal escalón del sistema. 2 2.3.- Obtenga la respuesta escalón unitaria de un sistema realimentado 1 unitariamente, cuya función de transferencia en lazo abierto es G ( s ) = s ( s + 1) Obtenga el tiempo de levantamiento, el tiempo de pico, sobreimpulso máximo y tiempo de asentamiento. 1 G (s) s ( s + 1) 1 1 1 y(s) = ·u ( s ) = · = 2 · 1 1 + G(s) s s + s +1 s 1+ s( s + 1) las soluciones de la ecuación: s2+s+1 =0 son −1± 3 j son raíces complejas 2 conjugadas. 1 A Bs + C As 2 + As + A + Bs 2 + Cs = + 2 = s ( s 2 + s + 1) 1 − 3 j 1 + 3 j s s + s + 1 s s + s+ 2 2 coeficiente de s2 A+B=0 coeficiente de s A+C=0 termino independiente y(s) = A=1 luego B=-1 C= -1 1 3 s+ 1 1 1 s +1 1 s +1 2 2 y(s) = − 2 = − = − − · 2 2 2 2 2 2 s s + s +1 s s 3 1 3 1 3 1 3 s + + s + + s + + 2 2 2 2 2 2 cuya transformada de Laplace inversa es: y (t ) = 1 − e 1 − t 2 −1 3 3 1 2t ·t − ·t ·cos · e ·sen 3 2 2 Con Matlab introduciendo la función de transferencia a una señal de entrada escalón unitaria sería: step(tf(1,[1 1 1])) Obteniéndose la siguiente figura. 3 Para la segunda parte del problema, lo único es aplicar las formulas correspondientes: ω n2 C ( s) = 2 R ( s ) s + 2δ ·ω n s + ω n2 llegamos a: ωn = 1 Sabemos que : esta ecuación la comparamos con 2δω n = 1 π −β tr = ωd δ = C (s) 1 = 2 R(s) s + s + 1 1 = 0. 5 2 π tp = ωd − Mp =e En nuestro sistema calcularemos primero: σ atenuación, σ ·π ωd ts = 4 σ β ángulo en radianes Y ωd frecuencia natural amortiguada. σ = δ ·ω n = 0.5·1 = 0.5 ω d = ω n · 1 − δ 2 = 1· 1 − 0.5 2 = 0.87 rad / seg en la figura siguiente hemos representados el ángulo β cuyo cálculo expresado en radianes es: β = tan −1 ωd 0.87 = tan −1 = 1.05radianes : σ 0.5 Aplicando las formulas anteriores tenemos: tr = tp = π − β 3.14 − 1.05 = = 2.09 seg. ωd 1 π 3.14 = = 3.61seg. ω d 0.87 4 − Mp =e ts = 4 σ = σ ·π ωd =e − 3.14·0.5 0.87 = 0.16 M p = 16% ó 4 = 8seg 0.5 Aclaración del calculo de β ωd s imaginario ωn β real σ 5 3-3.-Considérese el sistema de la fig-a. El factor de amortiguamiento relativo de este sistema es 0.158 y la frecuencia natural no amortiguada es de 3.16 rad/seg. Para mejorar la estabilidad relativa, se emplea una realimentación de tacómetro. Determinar el valor de kh para que el factor de amortiguamiento relativo del sistema sea 0.5. Calcule los errores contra el tiempo para una señal escalón y rampa para ambos sistemas. Er (s ) R(s ) + C (s) 10 s ( s + 1) − fig − a R(s ) Er (s ) + + − 10 s +1 − 1 s kh fig − b La función de transferencia del primer sistema es: C (s) 10 = 2 R ( s ) s + s + 10 Si esta función la comparamos con ω n2 C ( s) = 2 donde δ es factor de amortiguamiento relativo y ωn R ( s ) s + 2δ ·ω n s + ω n2 frecuencia natural no amortiguada. Tenemos: ω n = 10 = 3.16 y 2δ ··ω n = 1 luego δ = 1 2ω n = 1 = 0.158 2 * 3.16 La función de transferencia de la fig-b nos viene expresada por: C (s) 10 = 2 R ( s ) s + (1 + 10k ) s + 10 tenemos: si la comparamos con ω n2 C (s) = 2 R ( s ) s + 2δ ·ω n + ω n2 6 ω n = 10 = 3.16 y 2δ ·ω n = 1 + 10k luego 2δ ·ω n − 1 2 * 0.5 * 3.16 − 1 = = 0.216 k= 10 10 La transformada de Laplace de la función escalón y rampa es respectivamente. 1/s y 1/s2 El error nos viene expresado por: E r ( s) R( s) − C ( s) C (s) = = 1− R( s) R( s) R( s) En la fig-a tenemos: E r (s) C ( s) 10 s2 + s = 1− = 1− 2 = 2 R( s ) R( s ) s + s + 10 s + s + 10 para la señal escalón y rampa son: E r ( s) = s2 + s 1 · 2 ( s + s + 10) s E r ( s) = s2 + s 1 · 2 2 ( s + s + 10) s para la fig-btenemos: E r (s) C ( s) 10 s 2 + 3.16s = 1− = 1− 2 = 2 R( s ) R( s ) s + 3.16 s + 10 s + 3.16 s + 10 para la señal escalón y rampa son: E r ( s) = s 2 + 3.16 s 1 · 2 ( s + 3.16 s + 10) s E r (s) = s 2 + 3.16s 1 · 2 2 ( s + 3.16 s + 10) s La figura siguiente muestra la respuesta a una señal escalón unitaria, a los dos sistemas. 7 4-3.- La figura representa un diagrama de bloques de un sistema de control de posición de un vehiculo espacial. Suponiendo que la constante de tiempo T del controlador es de 3 seg. y que la razón entre el par y la inercia k/J es de 2/9 rad2/seg2, encuentre el factor de amortiguamiento relativo del sistema. R(s ) + C (s) 1 Js 2 k (Ts + 1) − Su función de transferencia viene expresada por: k 2 2s 2 (Ts + 1) (3s + 1) + C (s) k (Ts + 1) J 9 3 9 = 2 = = = kT k 2*3 2 2 2 R( s ) Js + kTs + k s2 + s+ s2 + s+ s2 + s + J J 9 9 3 9 comparando con ωn = 2 2 = 9 3 ω n2 C (s) = 2 llegamos a la conclusión que: R ( s) s + 2δ ·ω n + ω n2 2δ ··ω n = 2 3 luego δ = 1 3ω n = 1 2 3* 3 = 1 2 = 0.7 8 5-3.- Considere el sistema de la figura. Determine el valor de k de modo que el factor de amortiguamiento relativo δ sea 0.5. Después obtenga el tiempo de levantamiento tr , el tiempo de pico tp, el sobrepaso máximo Mp y el tiempo de asentimiento ts, en la respuesta escalón unitario C (s ) R(s ) + + − 16 s + 0.8 − 1 s k La función de transferencia de este sistemas es: C (s) 16 = 2 R ( s ) s + (0.8 + 16k ) s + 16 Si la comparamos con la formula general del sistema de 2º orden para el sistema subamortiguado: ω n2 C ( s) = 2 R ( s ) s + 2δ ·ω n s + ω n2 ω n2 = 16 2·δ ·ω n = (0.8 + 16k ) obtemos: llegamos a ωn= 4 2·0.5·4 = (0.8 + 16k ) queremos que δ=0.5 k= 2º Sabemos que : sí para nuestro sistema tr = π −β ωd tp = π ωd 4 − 0.8 = 0.2 16 − Mp =e En nuestro sistema calcularemos primero: σ atenuación, σ ·π ωd ts = 4 σ β ángulo en radianes Y ωd frecuencia natural amortiguada. σ = δ ·ω n = 0.5·4 = 2 ω d = ω n · 1 − δ 2 = 4· 1 − 0.5 2 = 3.46rad / seg en la figura siguiente hemos representados el ángulo β cuyo cálculo expresado en radianes es: β = tan −1 ωd 3.46 = tan −1 = 1.05radianes σ 2 9 ωd s imaginario ωn β real σ Aplicando las formulas anteriores tenemos: tr = tp = π − β 3.14 − 1.05 = = 0.60 seg. ωd 3.46 π 3.14 = = 0.91seg. ω d 3.46 − Mp =e ts = : 4 σ = σ ·π ωd =e − 3.14 ·2 3.46 = 0.16 4 = 2 seg 2 Su representación gráfica con Matlab, para una señal escalón unitario es: step(16,[1 4 16]) 10 6-3.- Determine el rango de valores de k para la estabilidad de un sistema de control con realimentación unitaria cuya función de transferencia en lazo abierto es: k G ( s) = . s ( s + 1)( s + 2) Su esquema sería: R(s) + k s( s + 1)( s + 2) − C (s ) su función de transferencia en lazo cerrado será: C (s) G ( s) k k = = = 3 3 R ( s ) 1 + G ( s ) s ( s + 1)( s + 2) + k s + 3s + 2 s + k Su ecuación característica es: s3+3s2+2s+k=0 Analizando la estabilidad por Routh 1 3 6−k 2 k 2 k 0 0 Para que sea estable el sistema la 1º columna tiene que ser positiva es decir: 6−k >0 esta segunda expresión k<6 k>0 y 2 Luego el sistema será estable cuando 0<k<6 11 7-3.- Considere la ecuación característica siguiente: s4+2s3+(4+k)s2+9s+25=0 Utilizand0 el criterio de estabilidad de Routh, determinar el rango de estabilidad de k. Aplicando las reglas de Routh tendremos: 1 2 2k − 1 2 18k − 109 2k − 1 25 4+k 9 25 25 0 0 0 0 Para que sea estable el sistema la 1º columna tiene que ser positiva es decir: 18k − 109 109 >0 k> = 6.06 y a la vez que el 2k − 1 18 denominador de esta expresión sea positivo, que así ocurre(2k-1). 2k-1>0 k>0.5 y Luego cuando k>6.06 el sistema es estable. 12 8.3.- - Considere el sistema de control de altitud de satélites que se muestra en la figura. La salida de este sistema ofrece constantes oscilaciones no deseadas. El sistema puede ser estabilizado mediante el uso de realimentación tacométrica, como se muestra en la segunda figura. Sí k/J=4.¿Qué valor de kh llevará a que el coeficiente de amortiguamiento relativo sea 0.6. R(s ) + 1 Js 2 k − C (s) C (s ) R(s ) + + − − k Js 1 s kh En la primera figura su función de transferencias viene dada por: k k k Js 2 = Las raíces de la ecuación característica son s = ∓ j 2 k J 1 + 2 Js + k Js luego se encuentra en el eje imaginario los dos polos, luego el sistema prácticamente es inestable. Con la realimentación tacométrica la función de transferencia nos viene expresada por: C (s) = R(s) k k ( Js + kk h ) s C (s) k 4 J = = 2 = = 2 k kk k R(s) Js + kk h s + k s + 4k h s + 4 1+ s2 + h s + ( Js + kk h ) s J J comparando con la de un sistema de 2º orden subamortiguado tenemos: ω n2 = 4 ωn = 2 2δ ·ω n = 2·0.6·2 = 4k h En la figura siguiente tenemos: luego kh = 0.6 13 g1 es la respuesta de la función de transferencia g1 = 4 a una señal escalón s +4 2 (step). , que corresponde al sistema sin estabilizar g2 es la respuesta de la función de transferencia g 2 = 4 a una señal s + 2.4s + 4 2 escalón (step)., que corresponde al sistema estabilizado. 14