Ejemplo Examen Septiembre 2009. La figura ilustra el mecanismo
Anuncio

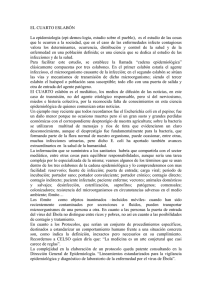
Ejemplo Examen Septiembre 2009. La figura ilustra el mecanismo para la apertura y cierre del portón trasero de una furgoneta. Se pide: 1) Dibujar un esquema cinemático del mecanismo y determinar la posición de cada uno de los eslabones cuando el portón trasero está en posición horizontal. Las dimensiones del dibujo están en milímetros. 2) Determinar el vector velocidad lineal del punto B extremo del portón cuando el vástago del cilindro se introduce a una velocidad constante de 1 mm/s, por el método de velocidades relativas. Utilizando las componentes i y j de los vectores velocidad. 3) Determinar el vector aceleración lineal del punto B. 4) Determinar el vector velocidad lineal del punto B por el método del C.I.R., cuando el vástago del cilindro se introduce a una velocidad conocida. 5) Plantear la/s ecuación/es de cierre necesarias para encontrar las expresiones analíticas de la incógnitas cinemáticas. En un dibujo indicar las incógnitas, considerando como entrada la posición angular del portón. No derivar. Además, encontrar la expresión analítica de la velocidad lineal del punto B, dejando la expresión en función de los parámetros empleados en el método de Raven. 6) Calcular la fuerza, Feq, que debe ejercer el cilindro del sistema elevador, en la dirección del vástago, para que soporte el peso P del portón en la posición del apartado 1).Expresar el resultado en función de P. 400 300 0 10 210º 300 P B 173.2 1) El esquema cinemático del mecanismo se puede ver en la siguiente figura: Para calcular el ángulo µ, como se conoce las distancias O2O4 y O2A y el ángulo AO2O4 , se obtiene mediante el teorema del coseno: 300 AO2O4 = ar tan = 60º 173.2 O2O4 = 3002 + 173.22 = 346, 4 mm d = O2O4 2 + O2 A2 − 2O2 O4 ⋅ O2 A ⋅ cos 60º = 376,08 mm 400 − 173, 2 = 52,91º d µ = arcos θ 3 = 360º − µ = 307,09º d 2) Para hallar la velocidad del punto B, por el método de las velocidades relativas, empezamos calculando la velocidad del punto A: i j k V A = ω 2 ∧ O2 A = 0 0 ω2 = −400ω2 j 400 cos 180 º 400sen 180 º 0 Pero en este caso no se conoce la velocidad angular ω2 y la velocidad del punto A no está completamente definida. Para resolver el problema hay que establecer las siguientes ecuaciones de velocidades: VO 3 = VO 4 + VO 3O 4 Esta primera ecuación relaciona un punto de la barra 3 que en ese instante coincide con el punto O4. Como la velocidad del punto O4 es cero y el módulo de la velocidad relativa VO 3O 4 es un dato del problema y vale 1 mm/s, la velocidad del punto O3 es: VO 3 = VO 3O 4 = 1 ⋅ cosθ3 i + 1 ⋅ senθ3 j = 0,603i − 0,798 j Además se puede establecer la siguiente ecuación de velocidades entre este punto O3 perteneciente al eslabón 3 y el punto A que también pertenece al eslabón 3: VO 3 = VA + VO 3 A De esta última ecuación nos queda por determinar VO 3 A , la cual vale: i j V O 3 A = ω 3 ∧ AO3 = 0 0 376, 08 ⋅ cos (θ 3 ) 376, 08 ⋅ sen (θ 3 ) el valor de la velocidad relativa k ω3 = 300ω3 i + 226, 8ω3 j 0 Por tanto la ecuación de velocidades anterior queda: 0,603i − 0,798 j = −400ω2 j + 300ω3 i + 226,8ω3 j 0,603 = 300ω3 −0,798 = −400ω2 + 226,8ω3 Que separando las componentes, se obtiene los siguientes valores para las velocidades angulares: ω3 = 0,00201 rad / s ω2 = 0,00313 rad / s Y la velocidad del punto A y B, serán: V A = ω 2 ∧ O2 A = −1, 252 j VA = 1, 252 mm / s VA = 180 º VB = VA + VBA i j k V B = V A + ω 2 ∧ AB = −1.25 j + 0 0 0, 003 = 0, 1565i − 1, 521 j 100 cos 210 º 100sen 210 º 0 ( ) VBA = 0,1565i − 0,271 j VB = 1, 53 mm / s VB = 275, 87 º V O 3 A = ω 3 ∧ AO3 = 0, 603i + 0, 456 j 3) Para determinar la aceleración del punto B, seguiremos el siguiente procedimiento: Igual que antes empezamos calculando la aceleración del punto A: i j k n AA = ω 2 ∧ V A = 0 0 0, 003 = 0, 0039i 0 −1, 252 0 t A A = α 2 ∧ O2 A= i j k 0 0 α 2 = −400α 2 j 400 cos 180 º 400sen 180 º 0 Y establecemos las siguientes relaciones entre las aceleraciones del punto O3 y O4: AO 3 = AO 4 + AO 3O 4 AO 3 = AO 4 + AOn3 O 4 + AOt 3O 4 + AOc 3 O 4 Siendo en este caso AO 4 = 0 , porque el punto O4 está fijo, AOn 3O 4 = 0 , porque el movimiento relativo es un movimiento rectilíneo y AOt 3O 4 = 0 , porque el movimiento relativo se realiza a velocidad constante. Por tanto solo queda por determinar la aceleración de Coriolis: c AO 3O 4 = 2 ⋅ ω 4 ∧ V O 3O 4 ( ) i j k = 2⋅ 0 0 0,002 = 0,0032i + 0,0024 j 0,603 −0,798 0 AO 3 = AOc 3O 4 = 0,0032i + 0,0024 j Por último estableciendo la relación de aceleraciones entre los puntos A y O3, tenemos: AO 3 = AA + AO 3 A Donde la aceleración relativa entre O3 y A viene dada por sus componentes normal y tangencial: i j k n AO 3 A = ω 3 ∧ V O 3 A = 0 0 0,002 = −9 ⋅10−4 i + 0,0012 j 0,603 0, 456 0 t AO 3 A = α 3 ∧ AO3 = i 0 j 0 AO3 cos (θ3 ) AO3sen (θ 3 ) k α 3 = 300α 3 i + 226,8α 3 j 0 Introduciendo los valores de las respectivas aceleraciones en la ecuación vectorial, se obtiene: 0,0032i + 0,0024 j = 0,0039i − 400α 2 j − 9 ⋅10−4 i + 0,0012 j + 300α 3 i + 226,8α 3 j 0,0032 = 0,0039 − 9 ⋅10−4 + 300α 3 0,0024 = −400α 2 + 0,0012 + 226,8α 3 Que separando las componentes, se obtiene los siguientes valores para las aceleraciones angulares: α 3 = 6,67 ⋅10−7 rad / s 2 α 2 = −2,62 ⋅ 10−6 rad / s 2 Una vez conocidas las aceleraciones angulares, podemos determinar el valor de la aceleración del punto B, mediante la siguiente ecuación: AB = AA + ABA i j k n ABA = ω 2 ∧ V BA = 0 0 0, 003 = 8, 5 ⋅ 10 −4 i + 4, 9 ⋅ 10 −4 j 0, 1565 −0, 271 0 i j k t ABA = α 2 ∧ AB = 0 0 −2, 62 ⋅ 10 −6 = −1, 31 ⋅ 10 −4 i + 2, 269 ⋅ 10 −4 j 100 cos 210 º 100sen210 º 0 AB = 0,0039i + 0,00105 j + ( 8,5 ⋅ 10−4 i + 4,9 ⋅10−4 j ) + ( −1,31 ⋅10−4 i + 2, 269 ⋅ 10−4 j ) AB = 0,00462i + 0,00176 j AB = 0,00496 mm / s 2 4) Para calcular la velocidad del punto B mediante el método de los centros instantáneos de rotación, hay que establecer a que eslabón pertenece la velocidad conocida. En este caso la velocidad conocida es la velocidad del vástago, es decir la velocidad relativa VO 3O 4 , pero como se había determinado en el apartado 1, esta velocidad es igual a la velocidad del punto O3, con lo cual la velocidad conocida pertenece al eslabón 3. Por otro lado la velocidad que queremos determinar, punto B, pertenece al eslabón 2. Por tanto hay que encontrar los centros instantáneos de la terna (1, 2, y 3), es decir (1,2), (1,3) y (2,3). Estos centros lo encontramos en la siguiente figura. Para el cálculo de la velocidad, en primer lugar obtenemos la velocidad del centro instantáneo (2,3), como perteneciente al eslabón 3: V23 = ω3 ⋅ (13 − 23) Nos hace falta conocer por tanto la velocidad angular ω3. Pero como conocemos la velocidad de un punto del eslabón 3, establecemos: ⇒ (13 − O3 ) ⋅ sen ( 37,09º ) = 300 (13 − O3 ) = 497, 46 mm (13 − 12 ) = (13 − O3 ) ⋅ cos ( 37,09º ) − 173, 2 = 223,615 mm VO 3 = ω3 ( 13 − O3 ) ⇒ ω3 = VO 3 = 0, 00201 rad / s ( 13 − O3 ) V23 = ω3 ⋅ (13 − 23) = 0, 00201 ⋅ ( 223, 615 + 400 ) = 1, 253 mm / s Una vez conocida la velocidad V23, esta misma velocidad pero referida al eslabón 2, sería: V23 = ω2 ( 12 − 23 ) = VA ⇒ ω2 = V23 1, 253 = = 0, 00313 rad / s ( 12 − 23 ) 400 Una vez conocida la velocidad angular del eslabón 2, obtenemos la velocidad del punto B: VB = ω2 ( 12 − B ) = 0, 00313 ⋅ 489, 16 = 1, 531 mm / s La dirección de la velocidad del punto B viene reflejada en la figura anterior. 5) Como el número de eslabones es 4, el número de ecuaciones de cierre es 1. La ecuación de cierre viene reflejada en la figura siguiente y viene expresada: r2 + r3 = r1x + r1 y r2 eiθ2 + r3 eiθ3 = r1x ei180º + r1 y ei 270º En la ecuación anterior si el ángulo θ2 es la entrada, tenemos como incógnitas r3 y θ3, ya que r2 es conocido y vale 400 mm, r1x=173,2 mm y r1y=300 mm. Para el cálculo de la velocidad del punto B, se plantea el vector de posición del punto B como: rB = r2 + h2 rB = r2 eiθ2 + h2 ei (θ2 +30º ) Derivando la expresión anterior obtenemos la velocidad del punto B: d ( rB ) dt = ( d r2 eiθ 2 + h2 ei (θ2 +30º ) dt ) ⇒ VB = iω2 r2 eiθ2 + ih2ω2 ei (θ2 +30º ) 7) Para el cálculo de la fuerza ejercida por el vástago, Feq , empezamos realizando el equilibrio de los eslabones: Tomando momentos en el eslabón 2, en el punto O2, obtenemos: ∑ M O 2 = 0 ⇒ − F32T ⋅ 400 + P .300 = 0 F32T = 0,75 ⋅ P En este eslabón no podemos aplicar el sumatorio de fuerzas igual a cero, porque desconocemos el valor del módulo de la fuerza F32N y el valor del módulo y dirección de la fuerza F12 . Continuamos por lo tanto en el eslabón 3. En este eslabón la fuerza F23N ya es conocida y aplicando momentos en el punto O3, se tiene: ∑ M O 3 = 0 ⇒ F23T ⋅ 226,8 − F23N .300 = 0 226,8 F23N = 0,75 ⋅ P ⋅ = 0,567 ⋅ P 300 Una vez obtenida la fuerza F23N , podemos aplicar el sumatorio de fuerzas en el eslabón 3 y se obtiene el valor de la Feq . ∑ F = 0 ⇒ Feq + F23N + F23T + F43 = 0 En la ecuación anterior se comprueba que el valor de la fuerza F43 = 0 , ya que si tomáramos momento respecto al punto A, en el eslabón 3, esta tiene que valer cero para cumplir que la suma de momentos en A sea igual a cero. Por tanto el valor de la fuerza Feq , es: Feq = − F23N + F23T ( Feq = 2 F23N + F23T 2 = 0,94 ⋅ P ) = 127,09º F eq Una vez conocida el valor de la fuerza equilibrante, podemos obtener el valor de las demás fuerzas aplicadas en cada eslabón, realizando el sumatorio de fuerzas en los eslabones que nos quedan 2 y 4, y su valor sería: Eslabón 4: ∑ F = 0 ⇒ F34 + F14 = 0 F14 = F34 = F43 = 0 Eslabón 2: ∑ F = 0 ⇒ F32N + F32T + F12 + P = 0 F12 = − F32N + F32T + P ( ) Este ejercicio también se puede resolver mediante el método de las potencias virtuales. En este caso tenemos que si el punto O3 se mueve con una velocidad VO 3 = 1 mm / s , y hemos calculado anteriormente el valor de la velocidad angular del eslabón 2, ω2=0,00313 rad/s. Por lo tanto se conoce el valor de las velocidades en los puntos de aplicación de la fuerza externa P y de la fuerza de equilibrio Feq (ver figura). Por tanto aplicando el método y ejerciendo un desplazamiento del punto O3 con la velocidad de 1 mm/s en la dirección indicada en la figura, obtenemos una velocidad en el punto de aplicación de la fuerza externa P de: VP = ω2 ⋅ 300 = 0,94 mm / s VP = 270º Con lo cual tenemos: VP Feq = ⋅ P = 0,94 ⋅ P VO 3 P ⋅ VP − Feq ⋅ VO 3 = 0 ⇒ 300 mm A 2 B O2 2 P 3 Feq O4 4 VO3 Problema 2.- El tren planetario de la figura tiene un eslabón soporte (2) que sirve de entrada del tren. El sol 1 está fijado al marco de referencia y un diámetro primitivo de 127 mm. La rueda dentada 3 tiene 42 dientes y la 4 tiene 21. La rueda dentada 5 tiene 32 dientes y está montada sobre el mismo eje que la 4. La rueda dentada 5 engrana con la rueda de dentado interior 6 que sirve de salida del tren. Se pide hallar la razón entre la entrada y la salida sabiendo que todas las ruedas tienen módulo unidad. En primer lugar se calcula el número de dientes que tiene la rueda 6, ya que este es necesario para calcular la relación de velocidades entre la entrada y salida. Para calcular el número de dientes tenemos en cuenta la siguiente relación: r6 = r1 + 2 ⋅ r3 + r4 + r5 Y como todos los engranajes tienen de módulo unidad, podemos calcular el número de dientes del engranaje 6: Z1 = D1p m mZ 6 mZ1 mZ 4 mZ 5 = + mZ 3 + + 2 2 2 2 = 127 = 127 1 ⇒ Z 6 = Z1 + 2 Z 3 + Z 4 + Z 5 = 264 Una vez se conocen el número de dientes de la rueda 6, se calcula la relación entre la entrada, que en este caso es el brazo del tren de engranaje epicicloidal y la salida que es el engranaje 6. Para ello aplicamos la ecuación del tren de engranaje epicicloidal entre los engranajes 1 y 6 del tren: ± ω1* ω1 − ωbrazo = ω6* ω6 − ωbrazo En la ecuación anterior se conoce el valor de la velocidad angular del engranaje 1, ω1=0, ya que esta fijo al marco de referencia. Por tanto si llamamos a ω6=ωsalida y a ωb=ωentrada, tenemos: + Z 4 ⋅ Z6 0 − ωentrada = Z1 ⋅ Z 5 ωsalida − ωentrada 0 − ωentrada 21 ⋅ 264 = 127 ⋅ 32 ωsalida − ωentrada ⇒ ωentrada = 3,746 ωsalida