blanca gómez
Anuncio

Solución de un problema de control
del sistema canónico mediante
polinomios de Hausdorff
Facultad de Ciencias Fı́sico Matemáticas
“Mat. Luis Manuel Rivera Gutiérrez”
Universidad Michoacana de San Nicolás de Hidalgo
Blanca de Jesús Gómez Orozco
Asesor
Dr. Abdon E. Choque Rivero
Junio 2015
Índice
1
2
Del problema de control al
problema de momento
Problema de momento
PMM
PMH
Polinomios ortogonales
Soluciones extremales del
PMH
Soluciones
problema
polinomios
Resultados
3
especiales del
CA mediante
ortogonales
encontrados
Ejemplos
x0 = (0, 1)
x0 = (−0.6, 0.18)
Resultados de la tesis
1 Se analizaron cuatro artı́culos, de reciente publicación del
2010 al 2015.
2
A.E.
A.E.
A.E.
A.E.
Se usó el método de problema de momentos reescrito con
polinomios ortogonales en [0, T ] del eje real.
Choque
Choque
Choque
Choque
Rivero,
Rivero,
Rivero;
Rivero;
y otros; The admissible control problem from the moment problem point of view. 2010
Yu. Karlovich; The time optimal control as an interpolation problem. 2011.
The resolvent matrix for the Hausdorff matrix moment problem ... . 2013.
From the Potapov to the Krein–Nudel’man representation of the resolvent .... 2015.
Ejemplo
Sea que una partı́cula se mueve en forma rectilı́nea sin fricción a la
cual se le aplica una fuerza acotada F .
F
m
De acuerdo a la segunda ley de Newton el movimiento de dicha
partı́cula despreciando fricciones está dado por la ecuación
F = ma. Supongamos que x representa la posición de la partı́cula
y m = 1. Hagamos u = F , entonces tenemos la ecuación
ẍ = u, |u| ≤ 1
Ejemplo
Equivalentemente (denotando x1 = x, x2 = ẋ) tenemos el sistema
ẋ1 = u
ẋ2 = x1 , |u| ≤ 1.
Sea dada una posición inicial x0 . Por ejemplo, deseamos hallar el
control óptimo u = u(t) (función acotada) y la trayectoria
correspondiente x(t), con x(0) = x0 , y x(T ) = 0 que minimice el
tiempo de recorrido, T → min.
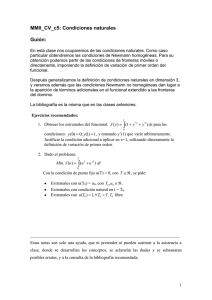
Graficamente
T >tmin
x2
_1
|u| <
x(t)
(0,0)
x0
x1
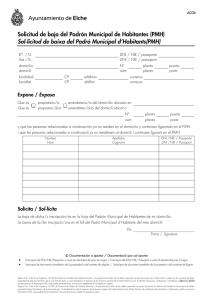
m=2
|u| ≤ 1
x0 = (0, 1)
u(t)
1.0
x2(t)
Control óptimo
tmin = 2
t1
t2
x0
t
-1.0
1 2
1
2
t1 = 1
t2 = 2
L.S. Pontryagin y otros; 1961.
A.E. Choque Rivero, Yu. Karlovich; 2011.
_
x (t1)
x1(t)
Planteamiento del problema control admisible (CA)
Se considera el sistema de control lineal canónico
ẋ = Ax + Bu
(1)
Sean dados x0 ∈ Rm , T > tmin . Hallar el conjunto de todos los
controles |u| ≤ 1, tales que la trayectoria x(t) del sistema (1),
partiendo del punto inicial x(0) = x0 llegue al origen en tiempo
T > tmin , es decir x(T ) = 0. Donde
A
:=
0
1
0
.
.
.
0
0
0
1
.
.
.
0
0
0
0
···
···
···
..
..
.
···
.
1
0
0
0
.
.
.
0
B
:=
1
0
0
.
.
.
0
.
Resultados nuevos
1 El resultado principal de la tesis es la demostración de la
existencia de dos controles, (17) y (18), para cada dimensión
del sistema estudiado. Además de que estos controles son
constantes a trozos y toman los valores ±1, alcanzan el origen
en el tiempo exacto T , T > tmin . Adicionalmente se
demuestra que estas soluciones tienen m saltos, donde m es
la dimensión del sistema.
(m)
uF
1
tj < t < τj+1
(t) =
(17)
−1
τj+1 < t < tj+1
(m)
uK
−1
tj < t < τj+1
(t) =
(18)
1
τj+1 < t < tj+1
Resultados nuevos
2 En comparación con el control óptimo que garantiza que éste
tiene no más de (m − 1) saltos, los controles que obtenemos,
poseen exactamente m saltos.
3
Se comparan los tiempos de conmutación, de control óptimo y
las dos soluciones extremales del sistema.
Planteamiento del problema
Se considera el sistema de control (1). Sean dados x0 ∈ Rm ,
T > tmin . Hallar el conjunto de todos los controles |u| ≤ 1, tales
que la trayectoria x(t) del sistema (1), partiendo del punto inicial
x(0) = x0 llegue al origen en tiempo T > tmin , es decir x(T ) = 0.
T
Donde A := {δj,k+1 }m
j,k=1 y B := (1, 0, . . . , 0) .
Del problema de control al problema de momento
Problema de momento
Reescribimos el sistema (1)
(
ẋ(t) = Ax(t) + Bu(t)
x(0) = x0
(2)
de esta forma
x(t) = eAt x0 +
Z
t
e−Aτ Bu(τ )dτ
0
Queremos encontrar T tal que x(T ) = 0.
En virtud a un control u(t) que satisfaga |u(t)| ≤ 1.
(3)
Del problema de control al problema de momento
Problema de momento
Equivalente a
Z
−x0 =
T
e−Aτ Bu(τ )dτ
(4)
0
Tomando en cuenta la relación
1
−τ
..
.
−Aτ
e
B=
3
(−1)j−1 j−1
(j−1)! τ
(5)
Tenemos lo siguiente:
3
e
At
2
= I + At + A
t2
2!
n−1
+ ··· + A
tn−1
(n − 1)!
=
1
t
.
.
.
tn−1
(n−1)!
0
1
···
···
..
..
.
···
t
.
0
0
.
.
.
1
Del problema de control al problema de momento
Problema de momento
−x0j =
Z
0
T
(−1)j−1 j−1
τ
u(τ )dτ j = 1, · · · , m.
(j − 1)!
(6)
donde x0j es la j-ésima entrada del vector x0 ∈ Rm .
Haciendo f = u+1
2
T j + (−1)j j!x0j
=
2j
Z
T
τ j−1 f (τ )dτ j = 1, · · · , m.
(7)
0
Denotamos
cj−1 (T, x0 ) :=
T j + (−1)j j!x0j
2j
j = 1, · · · , m.
(8)
4
4
A.E. Choque Rivero, Yu. Karlovich; The time optimal control as an
interpolation problem, Commun. Math. Anal, ISSN:0973-3841, Conf. 03(2011)
Del problema de control al problema de momento
PMM
De las dos últimas relaciones tenemos
Z
cj−1 (T, x0 ) =
T
τ j−1 f (τ )dτ j = 1, · · · , m.
(9)
0
que representa el problema de momento de Markov (PMM).
Problema de momento de Markov
Dada una colección de números {cj (T, x0 )}m−1
j=0 . Encontrar el
conjunto de funciones f con 0 ≤ f (τ ) ≤ 1 para τ ∈ [0, T ] tal que
se cumpla (9). Recordemos que u = 2f − 1.
Deseamos reescribir el PMM como problema de momento de Hausdorff (PMH).
Del problema de control al problema de momento
PMH
Problema de momento de Hausdorff
Dada una colección de números {sj (T, x0 )}m
j=0 . Encontrar el
conjunto de funciones no decrecientes σ(τ ) en [0, T ] tal que
Z
sj (T, x0 ) =
T
τ j dσ(τ ) j = 0, · · · , m.
(10)
0
Por la teorı́a de momentos en lugar de buscar funciones no decrecientes σ(τ ) del PMH en [0, T ], se busca una función analı́tica asociada a σ(τ ) de la forma
Z
s(z) =
0
T
dσ(τ )
,
(τ − z)
(11)
Del problema de control al problema de momento
PMH
Normalizando σ por la condición
σ(t) =
σ(t + 0) − σ(t − 0)
, σ(0) = 0,
2
La función σ es determinada únicamente por la siguiente fórmula.
Fórmula inversa de Stieltjes
σ(t) =
1
lim
π →0+
= es la parte imaginaria.
5
Z
t
=(s(x + i))dx, t ∈ [0, T ].
0
5
M.G. Krein, A.A. Nudel’man; The Markov moment problem and extremal
problems, Translations of mathematical monographs. Vol. 50. 2000.
Del problema de control al problema de momento
PMH
Relación entre σ(t) y f (t)
Por teoremas A.6 y A.7 de Krein-Nudel’man
Z
0
T
1
dσ(τ )
= − exp
τ −z
z
Z
0
T
6
tenemos
f (τ )dτ
z−τ
!
.
(12)
Las expansiones asintóticas formales del lado izquierdo y el lado derecho de (12) determinan una única y explı́cita relación entre {cj }m−1
j=0
y {sj }m
,
s
=
1,
s
=
c
.
0
1
0
j=0
Recordemos que u = 2f −1 entonces en (12) tenemos relación entre
u(t) y σ(t).
6
M.G. Krein, A.A. Nudel’man; The Markov moment problem and extremal
problems, Translations of mathematical monographs. Vol. 50. 2000.
Del problema de control al problema de momento
PMH
sj :=
1
j!
c0
−1
2c1
..
.
c0
..
.
···
..
.
..
.
(j − 1)cj−2 (j − 2)cj−3 · · ·
jcj−1
(j − 1)cj−2 · · ·
0
0
..
.
, j ≥ 2.
−(j − 1)
c0
(13)
Proposición 1.1
El problema de momento de Markov {cj−1 (T, x0 )}m
j=1 , es soluble
si y sólo si el problema de momento de Hausdorff {sj (T, x0 )}m
j=0 ,
es soluble. a
a
M.G. Krein, A.A. Nudel’man; The Markov moment problem and extremal
problems, Translations of mathematical monographs. Vol. 50. 2000.
Del problema de control al problema de momento
PMH
Problema de momento de Hausdorff
Dada una colección de números {sj (T, x0 )}m
j=0 . Encontrar el
conjunto de funciones no decrecientes σ(τ ) en [0, T ] tal que
Z
sj (T, x0 ) =
T
τ j dσ(τ ) j = 0, · · · , m.
0
Resulta que las soluciones son distintas para m = 2n y m = 2n + 1.
Del problema de control al problema de momento
PMH
CA
PMM
PMH
(T, x0 )
cj (T, x0 )
sj (T, x0 )
u(t)
f (t)
σ(t)
s(z) asociada a σ(t)
Del problema de control al problema de momento
PMH
La solución al PMH (11) se da mediante la relación
7
Soluciones de PMH
s(2n) (z) :=
∗−1
1 ∗
Θ∗2,n (z̄)Θ∗−1
2,n (0) w(z)+ T Θ1,n (z̄)Γ1,n (0)
∗−1
T −z ∗
zΓ∗2,n (z̄)Θ∗−1
2,n (0) w(z)+ T Γ1,n (z̄)Γ1,n (0)
(14)
s(2n+1) (z) :=
∗−1
∗
Q∗2,n (z̄)Q∗−1
2,n (0) w(z)−Q1,n+1 (z̄)P1,n+1 (0)
∗−1
∗ (z̄)Q∗−1 (0) w(z)+P ∗
−z(T −z)P2,n
2,n
1,n+1 (z̄)P1,n+1 (0)
w(z) pertenece a cierta clase de funciones holomorfas ∪{∞}.
Para cada w(z) tenemos una solución distinta.
Z
s(z) =
T
dσ(τ )
(τ − z)
(11)
0
7
A.E. Choque Rivero; From the Potapov to the Krein–Nudel’man
representation of the resolvent matrix of the truncated Hausdorff matrix
moment problem, Bol. Soc. Mat. Mexicana (2015).
Soluciones extremales del PMH
Soluciones especiales del problema CA mediante polinomios ortogonales
Soluciones extremales del PMH
Definición
(2n)
sK (z) =
Θ∗2,n (z̄)
z Γ∗2,n (z̄) ,
(2n)
sF (z) =
Θ∗1,n (z̄)
(T −z)Γ∗1,n (z̄)
(15)
(2n+1)
sK
(z)
=
Q∗2,n (z̄)
− z (T −z)P
,
∗
2,n (z̄)
(2n+1)
sF
(z)
=
Q∗
(z̄)
− P 1,n+1
.
∗
1,n+1 (z̄)
Estas soluciones se obtienen de (14), haciendo w = ∞ y w = 0.
Queremos ver que u(t) les corresponde.
Soluciones extremales del PMH
Soluciones especiales del problema CA mediante polinomios ortogonales
CA
PMM
PMH
(T, x0 )
cj (T, x0 )
sj (T, x0 )
u(t)
f (t)
σ(t)
s(z) asociada a σ(t)
Soluciones extremales del PMH
Resultados encontrados
Resultados encontrados
Nos interesa encontrar los controles correspondientes a las soluciones
extremales Friedrichs y Krein. Para ello estudiamos las propiedades
de las soluciones extremales. Resulta que:
1
Los controles correspondientes u(t) toman valores ±1.
2
Si m es la dimensión del sistema. Las dos controles
extremales poseen m saltos.
Soluciones extremales del PMH
Resultados encontrados
Lema 2.1
Sea de (15) el par de soluciones extremales del PMH.
a) Se pueden representar de forma general como:
sE (z) =
q(z)
.
p(z)
(16)
b) Los polinomios q(z) y p(z) son de grado (n − 1) y n
respectivamente.
Donde sE (z) puede ser sF (z) o sK (z) de (15).
(2n)
sK
(z) =
Θ∗ (z̄)
2,n
,
z Γ∗ (z̄)
2,n
(2n)
sF
(z) =
Θ∗ (z̄)
1,n
(T −z)Γ∗ (z̄)
1,n
(15)
Soluciones extremales del PMH
Resultados encontrados
En general el grado de q(z) es un grado menos que p(z).
Función extremal
(2n)
sK (z)
(2n)
=
sF (z) =
q(z)
p(z)
Θ∗2,n (z̄)
z Γ∗2,n (z̄)
n
(n + 1)
Θ∗1,n (z̄)
(T −z)Γ∗1,n (z̄)
n
(n + 1)
Lema 2.2
Sean Γr,j (z) con r = 1, 2. Los ceros de Γr,j (z) son reales, simples
y se encuentran en el interior del intervalo [0, T ]. Ver T.S. Chihara; An
introduction to orthogonal polynomials. Gordon and Breach, 1978.
Soluciones extremales del PMH
Resultados encontrados
Lema 2.3
Sean el par de funciones extremales del PMH como en (16).
a) El polinomio q(z) tiene raı́ces reales y simples.
b) Las raı́ces de q(z) y p(z) se intercalan.
Idea de la demostración
Ya que p(z) tiene sus raı́ces reales y simples en [0, T ], expandimos sE (z) en fracciones parciales.
sE (z) =
q(z)
p(z)
=
n
X
ρ(zi )
z − zi
donde ρ(zi ) =
q(zi )
p0 (zi )
,
i = 1, · · · , n.
i=1
Calculamos lim sE (z), luego aplicamos el teorema de valor intermedio. Asi obtenemos
z→zi
(z−ξ )···(z−ξ )
z1 < ξ2 < z2 < ξ3 · · · < ξn < zn , tal que satisfacen sE (z) = (z−z2 )···(z−zn ) .
n
1
Soluciones extremales del PMH
Resultados encontrados
Teorema 1
Sea x0 ∈ Rm , T > tmin y Γr,j (t), Θr,j (t), con r = 1, 2. Entonces
existen uF (t) y uK (t) dos controles admisibles extremales del
sistema (1) de la forma.
(2n)
uF
1
tj < t < τj+1
(t) =
−1
τj+1 < t < tj+1
(2n)
uK
−1
tj < t < τj+1
(t) =
1
τj+1 < t < tj+1
Soluciones extremales del PMH
Resultados encontrados
Sea m = 2n.
(2n)
(2n)
Expresamos las soluciones extremales, sF (t) y sK (t), con los
polinomios Γr,j (t) y Θr,j (t) donde r = 1, 2.
El par de controles admisibles esta dado de la siguiente manera.
(2n)
uF (t)
=
1
tj < t < τj+1
t ∈ [0, T ]
(17)
t ∈ [0, T ]
(18)
−1 τ
j+1 < t < tj+1
(2n)
uK (t) =
−1 tj < t < τj+1
1
τj+1 < t < tj+1
donde 0 = t1 < τ2 < t2 < τ3 < · · · < τn < tn (≤ T ) satisfacen las
funciones extremales (15).
Soluciones extremales del PMH
Resultados encontrados
Demostración
El conjunto de control admisible esta dado de la siguiente manera
2
u(t) = −
lim arg (−(t + i)sE (t + i)) − 1
π →0+
a
procedemos de esta ecuación para llegar a los controles deseados
(17) y (18). Donde sE (t) toma cualquiera de las siguientes
soluciones extremales sF (t) o sK (t).
a
A.E. Choque Rivero, V.I. Korobov, G.M.Skylar; The admissible control
problem from the moment problem point of view. Applied Mathematics Letters.
Vol.23, No.1(2010), 58-63.
Soluciones extremales del PMH
Resultados encontrados
...
(2n)
uF (t)
2
(2n)
lim arg −(t + i)sF (t + i) − 1
= −
π →0+
Θ∗1,n (t + i)
2
= −
lim arg −
π →0+
(T − (t + i))Γ∗1,n (t + i)
= −
−1 +
2
π
!
!
−1
0
(t−τ2 )···(t−τn+1 )
− (t−t1 )(t−t
>0
2 )···(t−tn+1 )(T −t)
π
(t−τ2 )···(t−τn+1 )
<0
− (t−t1 )(t−t
2 )···(t−tn+1 )(T −t)
Soluciones extremales del PMH
Resultados encontrados
...
= − −1 +
= − −1 +
=
1
2
π
0
tj < t < τj+1
π
τj+1 < t < tj+1
0 tj < t < τj+1
2 τ
j+1 < t < tj+1
tj < t < τj+1
−1 τ
j+1 < t < tj+1 .
Soluciones extremales del PMH
Resultados encontrados
Corolario 2.4
(2n)
sF (t)
(2n)
sK (t) .
uF (t) = sign
uK (t) = sign
(2n)
(2n)
Teorema 2
Sean u(t) los controles definidos en (17) y (18); cada control es
constante a trozos y tiene exactamente m saltos, donde m es el
grado del sistema.
Demostración
Se sigue directamente del Lema 2.3
Ejemplos
x0 = (0, 1)
m=2
|u| ≤ 1
x0 = (0, 1)
u(t)
1.0
x2(t)
Control óptimo
tmin = 2
t1
t2
x0
t
-1.0
8 9
8
9
t1 = 1
t2 = 2
L.S. Pontryagin y otros; 1961.
A.E. Choque Rivero, Yu. Karlovich; 2011.
_
x (t1)
x1(t)
Ejemplos
x0 = (0, 1)
m=2
|u| ≤ 1
x0 = (0, 1) tmin = 2
x2(t)
Control admisible de Friedrichs
uF(t)
T > tmin
1.0
t1
-1.0
t2
t1 = 0.42
t2 = 1.92
T =3
x0
T
t
xF (t1)
xF (t2)
x1(t)
Ejemplos
x0 = (0, 1)
m=2
|u| ≤ 1
x0 = (0, 1) tmin = 2
uK(t)
1.0
-1.0
x2(t)
Control admisible de Krein
T > tmin
t1
t1 = 1.08
t2 = 2.58
T =3
x0
t2
T
t
xK(t1)
xK(t2)
x1(t)
Ejemplos
x0 = (0, 1)
Extremales vs. óptimo
Comparación de las trayectorias
x2(t)
1.0
xF (t2)
xK(t1)
x0
xF (t1)
_
x (t1)
xK(t2)
x1(t)
Ejemplos
x0 = (−0.6, 0.18)
m=2
|u| ≤ 1
x0 = (−0.6, 0.18)
Control óptimo
tmin = 0.6
u(t)
1.0
t1
x2(t)
x0
t
-1.0
10 11
10
11
t1 = 0.6
L.S. Pontryagin y otros; 1961.
A.E. Choque Rivero, Yu. Karlovich; 2011.
_
x (t)
x1(t)
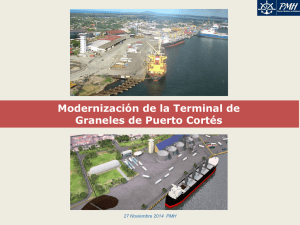
Ejemplos
x0 = (−0.6, 0.18)
t1 = 1.2
t2 = 2.4
T =3
m=2
|u| ≤ 1
x0 = (−0.6, 0.18) tmin = 0.6
Control admisible de Friedrichs
uF(t)
T > tmin
1.0
t1
t2
x2(t)
T
x0
t
xF (t1)
x1(t)
xF (t2)
-1.0
Ejemplos
x0 = (−0.6, 0.18)
t1 = 0.4
t2 = 2.2
T =3
m=2
|u| ≤ 1
x0 = (−0.6, 0.18) tmin = 0.6
uK(t)
1.0
Control admisible de Krein
T > tmin
x2(t)
xK(t2)
x0
t1
-1.0
t2
T
t
xK(t1)
x1(t)
Ejemplos
x0 = (−0.6, 0.18)
Extremales vs. óptimo
Comparación de las trayectorias
x2(t)
xK(t2)
x0
xF (t1)
_
x (t)
xK(t1)
x1(t)
xF (t2)