Leyes de Newton Axiomas de Newton Sistemas de referencia
Anuncio

Leyes de Newton
Axiomas de Newton
Sistemas de referencia inerciales vs no inerciales
Masa inercial vs masa gravitacional
Axioma #1
Existencia de sistemas de referencia inerciales
Existen sistemas de referencia en que un cuerpo sin fuerzas se
encuentra en un movimiento uniforme (~v (t) = cte.) — se llaman
sistemas de referencia inerciales.
Comentarios:
I
Consecuencia: en un sistema de referencia no inercial un
cuerpo sin fuerza tiene velocidad ~v (t) 6= cte.
I
Postula la existencia de sistemas de referencia inerciales.
I
No dice: “un cuerpo sin fuerza tiene un movimiento
uniforme”.
Axioma #2
Definición de la masa de inercia y dinámica del momento lineal
1. Cada cuerpo tiene una masa inercial mi (mi ∈ R+ )
2. Se define el momento lineal del cuerpo:
~p = mi · ~v
3. Tasa de cambio del momento lineal del cuerpo = fuerza
aplicada en el cuerpo:
~
~p˙ = F
Comentarios:
I
I
En general ~p˙ = ṁi~v + mi~v˙ 6= mi~v˙
Ej.: cohete con mi = mi (t)
Axioma #2 parte 3 compatible con axioma #1 para sistemas
inerciales. Para sistema no inerciales hay que “inventar”
fuerzas ficticias.
Axioma #3
Acción = reacción
~ 2→1 causada por
Interacción entre dos cuerpos resulta en fuerza F
~ 1→2 causada por cuerpo
cuerpo 2 y actuando en cuerpo 1, y fuerza F
1 y actuando en cuerpo 2. Por simetría siempre se aplica:
~ 1→2 = −F
~ 2→1
F
(acción = reacción)
Comentarios:
I
I
I
Solamente se aplica a fuerzas entre dos cuerpos.
Las dos fuerzas actúan en cuerpos diferentes.
No se aplica a fuerzas ficticias (centrífuga, Coriolis, etc.).
Transformación entre dos sistemas de referencia
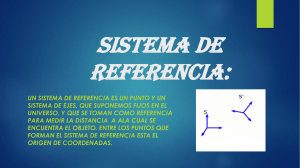
Caso especial: Sin giro de orientación relativa de los sistemas de referencia
mi
F~ = 0~
z0
~r 0
~r
z
e~ x0
Σ
x0
inercial
~
R
(t )
e~ z
e~ x
Σ0
e~ y
e~ z0
e~ y0
y0
y
x
I
I
Movimiento uniforme en Σ: ~r (t) = ~r0 + ~v0 · t con ~r0 , ~v0 = cte.
~
En Σ0 : ~r 0 (t) = ~r (t) − R(t)
~
¿Condición para R(t)
para que Σ0 sea también inercial?
Condición:
Σ0 incercial ⇐⇒ ~r 0 (t) = movimiento uniforme
Usando trayectoria en Σ0 :
!
~
Σ0 incercial ⇐⇒ ~r 0 (t) = ~r0 + ~v0 · t − R(t)
= ~r00 + ~v00 · t
Condición para la trayectoria de Σ0 como visto desde Σ:
~
~0 + V
~0 · t
Σ0 incercial ⇐⇒ R(t)
=R
I
¡Movimiento relativo entre Σ y Σ0 debe ser uniforme!
Transformación de Galilei
Transformación de coordenadas entre sistemas inerciales:
~0 + V
~ 0 · t,
~r 0 (t) = ~r (t) + R
~ 0, V
~ 0 = cte.
R
Comentarios:
I
Cualquier otra transformación transforma un sistema inercial
en un sistema no inercial.
I
Es una relación no relativista:
Se supone que en ambos sistemas de referencia los relojes
andan iguales — no se transforma el tiempo t → t 0 .
I
Versión relativista: Transformación de Lorentz
Fuerzas ficticias en sistemas de referencia no inerciales
~ = ~0, Σ es inercial → movimiento uniforme ~r (t) = ~r0 + ~v0 · t
F
~
~0 + V
~0 · t
Ahora Σ0 sea no inercial porque R(t)
6= R
Consecuencia para la aceleración en Σ0 :
~¨
~¨
~¨r 0 (t) = ~¨r (t) −R(t)
6= ~0
= −R(t)
|{z}
=~0
Aparece una fuerza ficticia en Σ0 :
¨0
~¨
~0
F
ficticia = mi · ~r (t) = −mi R(t)
I
Compensa movimiento acelerado de Σ0
I
No es fuerza de interacción entre dos cuerpos
I
No se aplica “acción = reacción”
Masa inercial vs masa gravitacional
1. Masa inercial = “Resistencia” contra un cambio de
movimiento:
~
~p˙ = mi~v˙ = F
⇒
~
F
~v˙ =
mi
Misma fuerza genera aceleración menor en un cuerpo con
masa inercial mayor.
2. Masa gravitacional = proporcional a la fuerza gravitacional:
~ grav = −mg · g · ~ez
F
¡Son conceptos muy diferentes!
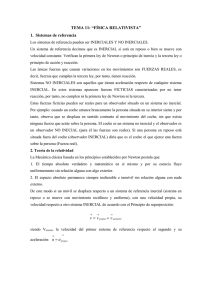
inercial
V̇z = 0
z
no inercial
V̇z 6= 0
Fz0
Σ
Σ0
Fz0 = −mgg
Fz00
Σ00
Fz00 = −mgg − miV̇z
En Σ00 se siente una aceleración terrestre efectiva: g 00 = g + V̇z
Ascensor cayendo con Vz = −g → g 00 = 0
I
Masas son equivalentes: mg ≡ mi