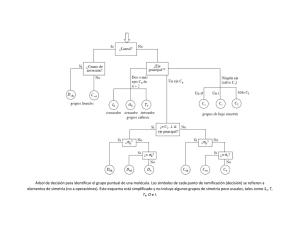
Descomposición
Anuncio

PRODUCTO Y DESCOMPOSICIÓN DE TRANSFORMACIONES ORTOGONALES En el plano vectorial V2 1. El producto de dos giros o rotaciones vectoriales de V2 es otro giro de ángulo la sumas de los dos ángulos: g g g . Es más, O V2 es un subgrupo de OV2 . 2. El producto de un giro y una simetría axial de V2 es una simetría axial de V2. 3. El producto de dos simetrías axiales vectoriales de V2 es una rotación vectorial de ángulo el doble del ángulo que forman entre sí los dos ejes de las simetrías: s e ` s e g , siendo e, e` . 2 Recíprocamente, toda rotación vectorial de ángulo se descompone en el producto de dos simetrías axiales, pudiendo elegirse arbitrariamente una de ellas. La otra ha de tomarse de forma que e, e` . 2 En el espacio vectorial V3 1. El producto de dos simetrías especulares vectoriales de V3 es una rotación vectorial de eje la recta intersección de los dos planos de las simetrías y de ángulo el doble del ángulo que forman entre sí los dos planos de las simetrías: s ` s ge, , siendo , ` . 2 Recíprocamente: toda rotación vectorial de eje e y ángulo se descompone en el producto de dos simetrías especulares, una elegida arbitrariamente y la otra de forma que ` e y , ` . 2 2. Toda simetría rotacional se descompone en el producto de tres simetrías especulares vectoriales. 3. El producto de un número par de simetrías especulares vectoriales es una rotación vectorial. 4. O V3 es un subgrupo de OV3 . Las transformaciones involutivas de O V3 son la identidad ( I = s V3 ) y las simetrías axiales ( s e g e,180 ). 5. Toda rotación vectorial de V3, de eje arbitrario, se puede descomponer como el producto de tres rotaciones vectoriales respecto de los ejes de coordenadas (este resultado se usa en “orientación relativa” en Fotogrametría. Teorema de descomposición de Transformaciones Ortogonales Cualquier transformación ortogonal f OVn es el producto de, a lo sumo, n simetrías ortogonales respecto de hiperplanos. U. D. de Matemáticas de la E.T.S.I.T.G.C. Descomposición de Movimientos En el plano euclídeo E2: 1) Giro: G ( A, α ) = S e ' S e uno de los ejes es cualquier recta que pase por A y el otro ha de verificar que: e ∩ e' = A , y el ángulo de e a e’ sea α 2 . 2) Traslación: T→ = S e ' S e u → Uno de los ejes es cualquier recta perpendicular a u y el otro ha de verificar que: → u también sea perpendicular a u , d (e, e’) = y el sentido de e a e’ ha de coincidir 2 → con el sentido de u . Para el resto de movimientos en E2: Identidad: I = S e S e Simetría axial: S e Simetría deslizante: T→ u S e = S e '' S e ' S e En el espacio euclídeo E3: 1) Giro: G (e, α ) = S π ' S π uno de los planos se toma arbitrariamente con tal de que contenga al eje e y el otro ha de verificar que: π ∩ π ' = e , y el ángulo de π a π ’ sea 2) Traslación: T→ = S π u ' α 2 . Sπ → uno de los planos se toma arbitrariamente con tal de que sea perpendicular a u y el otro ha de verificar: → u que sea también perpendicular a u , d ( π , π ’) = y el sentido de π a π ’ ha de 2 → coincidir con el sentido de u . Para el resto de movimientos en E3: Identidad: I = S π Sπ Simetría especular: S π Simetría rotacional: G (e, α ) S π = S π Simetría deslizante: T→ S π = S π u '' Sπ '' Sπ ' Movimiento helicoidal: T→ G (e, α ) = S π u Sπ ' Sπ '' ' Sπ '' Sπ ' Sπ U. D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía Teorema de Descomposición: (Cartan-Dieudonnè) Todo movimiento de En se descompone a lo sumo en n + 1 simetrías ortogonales respecto de hiperplanos (a lo sumo en n, si el movimiento tiene puntos dobles). Composición o producto de Movimientos En el plano euclídeo E2: Giro por traslación: T→ G ( A, α ) = G (B, α ) u Simetría por traslación: T→ S e = T→ S e ' u → con e’ paralelo a u ' , es decir, simetría u' deslizante. Producto de dos giros con el mismo centro: ⎪⎧G ( A, α + β ) si α + β ≠ 360 G ( A, β ) G ( A, α ) = ⎨ ⎪⎩ I si α + β = 360 Producto de dos giros de distinto centro: ⎧⎪G (C , α + β ) si α + β ≠ 360 G (B, β ) G ( A, α ) = ⎨ si α + β = 360 ⎪⎩T→u En el espacio euclídeo E3: → Giro por traslación: T→ G (e, α ) = T→ G (e ' , α ) con e’ paralelo a u ' , es decir, u u' movimiento helicoidal. → Simetría por traslación: T→ S π = T→ S π ' con π ’ paralelo a u ' , es decir, simetría u u' deslizante. Producto de dos giros con el mismo eje: ⎪⎧G (e, α + β ) si α + β ≠ 360 G (e, β ) G (e, α ) = ⎨ ⎪⎩ I si α + β = 360 Composición de traslaciones en En: El conjunto de las traslaciones de En es un grupo conmutativo respecto al producto o composición de transformaciones: T→ T→ = T→ v u → u+v , I = T→ , 0 ⎛⎜ T→ ⎞⎟ ⎝ u⎠ −1 = T→ −u U. D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía