Cap4: Convexidad
Anuncio

Capı́tulo 4
Convexidad
1.
Conjuntos convexos
En este capı́tulo estudiaremos el concepto de convexidad, el cual es sumamente importante en el análisis. Estudiaremos conjuntos convexos y funciones convexas en Rn , ası́ como las propiedades y relaciones entre sus puntos
y valores extremos.
En esta sección estudiaremos los conjuntos convexos. Recordemos que
un conjunto K ⊂ Rn es convexo si, para todo x, y ∈ K y t ∈ [0, 1],
(1 − t)x + ty ∈ K.
Ejemplo 4.1. Un semiespacio
H = {x ∈ Rn : x · x0 ≥ c}
es convexo: Si x, y ∈ H, t ∈ [0, 1],
((1 − t)x + ty) · x0 = (1 − t)x · x0 + ty · x0 ≥ (1 − t)c + tc = c,
ası́ que (1 − t)x + ty ∈ H.
Proposición 4.2. La intersección de conjuntos convexos es convexo.
Demostración.
Sea {Kα }α una colección de conjuntos convexos, y sean
T
x, y ∈ α Kα . Entonces x, y ∈ Kα para todo α y, si 0 ≤ t ≤ 1,
(1 − t)x + ty ∈ Kα
T
para todo α. Por lo tanto (1 − t)x + ty ∈ α Kα .
65
66
4. Convexidad
Definición 4.3. Decimos que Ω ⊂ Rn es un polı́topo convexo si es la intersección de un número finito de semiespacios cerrados. Es decir,
Ω=
m
\
Hi ,
i=1
Hi = {x · xi ≥ ci }.
La proposición 4.2 justifica el adjetivo convexo en la definición anterior.
Definición 4.4. Sea K un conjunto convexo cerrado. Un hiperplano de
apoyo para K es un hiperplano
P = {x ∈ Rn : x · x0 = c}
tal que P ∩ K 6= ∅ y
K ⊂ HP = {x ∈ Rn : x · x0 ≥ c}.
Es decir, el hiperplano P interseca al convexo K, y K se encuentra de
un solo lado de P . El siguiente teorema establece que un conjunto convexo
cerrado tiene un hiperplano de apoyo en cada punto de su frontera.
Teorema 4.5. Sea K un conjunto convexo cerrado y x0 ∈ fr K. Entonces
existe un hiperplano de apoyo P para K tal que x0 ∈ P .
Demostración. Sea (yk ) una sucesión en Rn \ K tal que yk → x0 . Para
cada k, sea zk ∈ K un punto más cercano a yk en K, es decir
|zk − yk | ≤ |x − yk |
para todo x ∈ K.
Tal punto existe por la proposición 1.34. Sea
zk − yk
uk =
.
|zk − yk |
Como (uk ) es acotada, entonces existe una subsucesión que converge por el
teorema de Bolzano-Weierstrass. Para simplificar, supongamos que uk → u.
Sea
P = {x ∈ Rn : (x − x0 ) · u = 0}.
Vamos a demostrar que P es un hiperplano de apoyo para K. Es decir,
tenemos que mostrar que
K ⊂ {x ∈ Rn : (x − x0 ) · u ≥ 0}.
Sea x ∈ K y ε > 0. Vamos a mostrar que (x − x0 ) · u ≥ −ε
Demostraremos primero que (x − zk ) · uk ≥ 0 para todo k. Si t ∈ [0, 1] y
y = (1 − t)zk + tx,
entonces y ∈ K y
|y − yk | ≥ |zk − yk |.
67
1. Conjuntos convexos
En otras palabras, |y − yk |2 ≥ |zk − yk |2 . Además
|y − yk |2 = |(1 − t)zk + tx − yk |2 = |t(x − zk ) + (zk − yk )|2
= t2 |x − zk |2 + 2t(x − zk ) · (zk − yk ) + |zk − yk |2 ,
por lo que, si t 6= 0,
t|x − zk |2 + 2(x − zk ) · (zk − yk ) ≥ 0.
Como t ∈ (0, 1] es arbitrario, obtenemos 2(x − zk ) · (zk − yk ) ≥ 0. Por lo
tanto
(x − zk ) · uk ≥ 0.
Dado ε > 0, tomamos k tal que
ε
|uk − u| <
2(|x − x0 | + 1)
y
ε
|yk − x0 | < .
4
Entonces, como |uk | = 1,
|(x − x0 ) · u − (x − zk ) · uk |
≤ |(x − x0 ) · u − (x − x0 ) · uk | + |(x − x0 ) · uk − (x − zk ) · uk |
≤ |x − x0 ||u − uk | + |uk ||zk − x0 |
ε
< + |zk − yk | + |yk − x0 |
2
ε
ε
ε
≤ + 2|x0 − yk | < + 2 = ε,
2
2
4
donde también hemos usado el hecho que |zk − yk | ≤ |x − yk |. Por lo tanto,
como (x − zk ) · uk ≥ 0,
(x − x0 ) · u ≥ (x − x0 ) · u − (x − zk ) · uk ≥ −ε.
Por lo tanto, como ε > 0 es arbitrario,
(x − x0 ) · u ≥ 0.
Corolario 4.6. Sea K un conjunto convexo cerrado no vacı́o y tal que
K 6= Rn . Entonces K es la intersección de semiespacios cerrados.
Demostración.
Para cada x ∈ fr K, tomamos un hiperplano de apoyo Px
T
con x ∈ Px K. Dejamos como ejercicio (ejercicio 2) verificar que
\
K=
H Px .
x∈fr K
68
2.
4. Convexidad
Combinaciones convexas y simplejos
Definición 4.7. Una combinación convexa de x1 , . . . , xm ∈ Rn es una combinación lineal
m
X
t i xi
i=1
tal que
ti ≥ 0,
i = 1, . . . , m,
y
m
X
ti = 1.
i=1
Ejemplo 4.8. El vector (1 − t)x + ty, t ∈ [0, 1], es una combinación convexa
de x y y: t, 1 − t ≥ 0 y (1 − t) + t = 1.
Proposición 4.9. K ⊂ Rn es convexo si, y solo si, es cerrado bajo combinaciones convexas.
Demostración. Si K es cerrado bajo combinaciones convexas, entonces es
convexo simplemente por la definición de convexidad y el ejemplo 4.8.
P
Sea K convexo, x1 , . . P
. , xm ∈ K, y t1 , . . . , tm ≥ 0 tales que
ti = 1.
Queremos demostrar que m
t
x
∈
K.
Esto
lo
haremos
por
inducción
en
i=1 i i
m: si m = 2, (1 − t)x1 + tx2 ∈ K por la definición de convexo.
PmSea m > 2 y suponemos que el resultado es cierto para m − 1. Si tm = 1,
i=1 ti xi = xm ∈ K. Supongamos entonces que tm < 1. Sabemos que
t1 + t2 + . . . + tm−1 = 1 − tm .
Entonces
y, por inducción,
x̄ =
t1
t2
tm−1
+
+ ... +
=1
1 − tm 1 − tm
1 − tm
t2
tm−1
t1
x1 +
x2 + . . . +
xm−1 ∈ K.
1 − tm
1 − tm
1 − tm
Entonces, como K es convexo y x̄, xm ∈ K,
t1 x1 + . . . + tm−1 xm−1 + tm xm = (1 − tm )x̄ + tm xm ∈ K.
La siguiente proposición implica que, en toda combinación convexa, solo
n + 1 puntos son suficientes.
Proposición 4.10. Sea S ⊂ Rn , y sea x la combinación convexa de puntos
en S. Entonces x es la combinación convexa de a lo más n + 1 puntos de S
69
2. Combinaciones convexas y simplejos
Demostración. Supongamos que
m
X
t i xi ,
ti ≥ 0,
x=
i=1
m
X
ti = 1,
i=1
y m > n + 1. Vamos a demostrar que x es la combinación convexa de a lo
más m − 1 de las xi . Claramente podemos asumir que todo ti > 0.
Como m − 1 > n,
x1 − xm , x2 − xm , . . . , xm−1 − xm
son linealmente dependientes, ası́ que existen c1 , c2 , . . . , cm−1 , no todos cero,
tales que
c1 (x1 − xm ) + c2 (x2 − xm ) + . . . + cm−1 (xm−1 − xm ) = 0.
Sea cm = −(c1 + c2 + . . . + cm−1 ). Entonces
c1 x1 + c2 x2 + . . . + cm−1 xm−1 + cm xm = 0
y
m
X
ci = 0.
i=1
Sea α tal que
1
c1
cm
= máx{ , . . . ,
},
α
t1
tm
y si = ti − αci . Observamos que α > 0. Como αci ≤ ti para todo ci 6= 0,
si ≥ 0 y
m
m
m
X
X
X
ci = 1.
ti − α
si =
i=1
i=1
i=1
Además, si0 = 0 para algún i0 . Entonces
m
X
i=1
i0 6=0
s i xi =
X
X
X
(ti − αci )xi =
t i xi − α
ci xi = x,
por lo que x es combinación convexa de los m − 1 i, i 6= i0 .
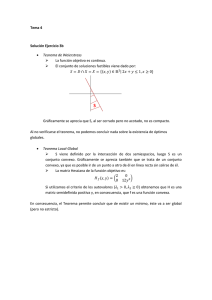
Definición 4.11. Sean x0 , x1 , ..., xr ∈ Rn tales que
x1 − x0 , x2 − x0 , . . . , xr − x0
son linealmente independientes. El r-simplejo generado por x0 , x1 , . . . , xr es
el conjunto de todas las combinaciones convexas de x0 , x1 , . . . , xr . Véase la
figura 1.
Si K es el r-simplejo generado por P
x0 , x1 , . . . , xr y x ∈ K, entonces
existen únicos t0 , t1 , . . . , tr tales que x = ri=0 ti xi (ejercicio 4.) A las coordenadas del vector (t0 , t1 , ..., tr ) se les llama coordenadas baricéntricas de
K.
El simplejo estándar en Rn es el n-simplejo generado por 0, e1 , e2 , . . . , en .
70
4. Convexidad
.
x0
x0
0−simplejo
x1
1−simplejo
x2
x2
x3
x0
x1
x0
2−simplejo
x1
3−simplejo
Figura 1. r-simplejos con r = 0, 1, 2, 3.
3.
Funciones convexas
En esta sección estudiaremos a las funciones complejas y algunas de sus
propiedades analı́ticas.
Definición 4.12. Sea K ⊂ Rn convexo y f : K → R. Decimos que f es
convexa si, para x1 , x2 ∈ K y t ∈ [0, 1],
f (tx1 + (1 − t)x2 ) ≤ tf (x1 ) + (1 − t)f (x2 ).
Es fácil verificar que si f : K → R es convexa y
nación convexa de x1 , . . . , xm ∈ K, entonces
f
m
X
i=1
m
X
ti f (xi ).
t i xi ≤
Pm
i=1 ti xi
es una combi-
i=1
Véase el ejercicio 8.
Ejemplo 4.13. f : Rn → R, f (x) = |x| es una función convexa:
|tx1 + (1 − t)x2 | ≤ t|x1 | + (1 − t)|x2 |,
por la desigualdad del triańgulo y el hecho que t, 1 − t ≥ 0.
Para f : K → R, definimos el conjunto K + ⊂ Rn+1 como
K + = {(x, z) ∈ K × R : z ≥ f (x)}.
K + es entonces el conjunto de puntos en Rn+1 que están arriba de la gráfica
de f .
Proposición 4.14. f : K → R es convexa si, y solo si, K + es convexo.
71
3. Funciones convexas
Demostración. Supongamos que f es convexa y sean (x1 , z1 ), (x2 , z2 ) ∈
K + . Entonces z1 ≥ f (x1 ) y z2 ≥ f (x2 ), y queremos mostrar que, para
t ∈ [0, 1],
t(x1 , z1 ) + (1 − t)(x2 , z2 ) = (tx1 + (1 − t)x2 , tz1 + (1 − t)z2 ) ∈ K + ,
es decir,
tz1 + (1 − t)z2 ≥ f (tx1 + (1 − t)x2 ).
Pero, como f es convexa,
f (tx1 + (1 − t)x2 ) ≤ tf (x1 ) + (1 − t)f (x2 ) ≤ tz1 + (1 − t)z2 .
Entonces K + es convexo.
Supongamos ahora que K + es convexo. Tomamos x1 , x2 ∈ K. Entonces
(x1 , f (x1 )) ∈ K + y (x2 , f (x2 )) ∈ K + . Como K + es convexo, para t ∈ [0, 1]
t(x1 , f (x1 ))+(1−t)(x2 , f (x2 )) = (tx1 +(1−t)x2 , tf (x1 )+(1−t)f (x2 )) ∈ K + .
Pero esto quiere decir
tf (x1 ) + (1 − t)f (x2 ) ≥ f (tx1 + (1 − t)x2 ).
Por lo tanto f es convexa.
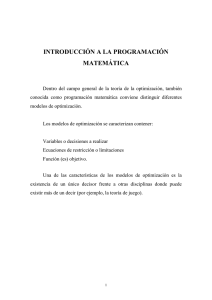
La siguiente proposición nos será de utilidad más adelante. Primero definimos, para c ∈ R, el conjunto
Kc = {x ∈ K : f (x) ≤ c},
el corte de f a la altura c. Véase la figura 2.
y
c
c
x
Kc
Figura 2. El conjunto de las x tal que f (x) queda por debajo de c es Kc .
Proposición 4.15. Si f es convexa en K, entonces cada Kc es convexo.
Demostración. Sean x1 , x2 ∈ Kc . Entonces f (x1 ) ≤ c, f (x2 ) ≤ c. Como f
es convexa, para t ∈ [0, 1],
f (tx1 + (1 − t)x2 ) ≤ tf (x1 ) + (1 − t)f (x2 ) ≤ tc + (1 − t)c = c,
por lo que entonces tx1 + (1 − t)x2 ∈ Kc .
72
4. Convexidad
La inversa de la proposición 4.15 es falsa.
Ejemplo 4.16. Consideremos f : R → R dada por f (x) = x3 . Entonces
√
K = R y cada Kc es el intervalo (−∞, 3 c), ası́ que es convexo. Sin embargo,
f no es convexa.
Ejemplo 4.17. Sea A ⊂ Rn un conjunto cerrado tal que A 6= ∅. Definimos
f : Rn → R como
f (x) = mı́n{|x − y| : y ∈ A}.
Tal mı́nimo existe por la proposición 1.34. Demostraremos que f es convexa
si, y solo si, A es convexo.
Si f es convexa, entonces, como A = K0 , A es convexo, por la proposición
4.15.
Supongamos ahora que A es convexo. Sean x1 , x2 ∈ Rn y t ∈ [0, 1].
Tomamos y1 , y2 ∈ A tales que f (x1 ) = |x1 − y1 |, f (x2 ) = |x2 − y2 |. Como A
es convexo, ty1 + (1 − t)y2 ∈ A, ası́ que
f (tx1 + (1 − t)x2 ) ≤ |tx1 + (1 − t)x2 − (ty1 + (1 − t)y2 )|
≤ t|x1 − y1 | + (1 − t)|x2 − y2 | = tf (x1 ) + (1 − t)f (x2 ).
Entonces f es convexa.
Ahora estudiaremos la continuidad de las funciones convexas. Primero,
observemos que no todas las funciones convexas son continuas.
Ejemplo 4.18. Sea f : [0, 1] → R dada por
(
1, x = 0, 1
f (x) =
0, 0 < x < 1
Entonces f es convexa, pero no es continua en 0 ni en 1.
Sin embargo, notemos que la función f no es continua precisamente en
los extremos de [0, 1].
Teorema 4.19. Sea K ⊂ Rn convexo y abierto, y f : K → R convexa.
Entonces f es continua.
Lema 4.20. Sea R un rectángulo cerrado. Entonces R es el conjunto de
todas las combinaciones convexas de sus vértices.
En otras palabras, si R = [a1 , b1 ] × · · · × [an , bn ], el conjunto V de sus
vértices es el conjunto
V = {(c1 , c2 , ..., cn ) : ci = ai o bi }.
Entonces R es el conjunto de todas las combinaciones convexas de puntos
en V .
La demostración del lema 4.20 la dejamos como ejercicio (ejercicio 7).
73
3. Funciones convexas
Demostración. Sea x0 ∈ K y R ⊂ K un rectángulo con centro en x0 y
de lado 2r, como se muestra en la figura 3. Sea B la bola cerrada Br (x0 ) y
x0 + u
x
x0
r
x0 − u
2r
Figura 3. El rectángulo de la demostración del teorema 4.19.
x ∈ B. Entonces la recta que pasa por x0 y x corta a fr B en dos vectores,
|x − x0 |
digamos x0 + u y x0 − u, con |u| = r. Entonces, si t =
, x y x0
r
satisfacen las siguientes relaciones convexas:
x = (1 − t)x0 + t(x0 + u),
t
1
x+
(x0 − u).
x0 =
t+1
t+1
Sea V el conjunto de vértices de R, y
M = máx{f (y) : y ∈ V }.
Como f es convexa, el lema 4.20 implica que, para z ∈ R, f (z) ≤ M . Además
f (x) ≤ (1 − t)f (x0 ) + tf (x0 + u)
(4.1)
y
(4.2)
f (x0 ) ≤
1
t
f (x) +
f (x0 − u).
t+1
t+1
De (4.1) obtenemos
por lo que
De (4.2),
f (x) ≤ (1 − t)f (x0 ) + tM,
f (x) − f (x0 ) ≤ t(M − f (x0 )).
f (x0 ) ≤
t
1
f (x) +
M,
t+1
t+1
ası́ que
Entonces
t(f (x0 ) − M ) ≤ f (x) − f (x0 ).
|f (x) − f (x0 )| ≤ t|M − f (x0 )| =
|M − f (x0 )|
|x − x0 |.
r
74
4. Convexidad
Dado ε > 0, escogemos
n
δ = mı́n r,
o
rε
.
|M − f (x0 )| + 1
Entonces |x − x0 | < δ implica que |f (x) − f (x0 )| < ε.
El siguiente teorema establece un criterio para la convexidad de funciones
diferenciables.
Teorema 4.21. Sea f diferenciable en K. Entonces f es convexa si, y solo
si,
f (x) ≥ f (x0 ) + Df (x0 )(x − x0 )
(4.3)
para todo x, x0 ∈ K.
Demostración. Supongamos que f es convexa, y sea h = x − x0 . Como f
es convexa, para t ∈ (0, 1]
f (x0 + th) ≤ (1 − t)f (x0 ) + tf (x0 + h),
por lo que
f (x0 + th) − f (x0 ) ≤ t(f (x0 + h) − f (x0 )).
Restamos Df (x0 )(th) = tDf (x0 )(h)) de la desigualdad, dividimos entre t y
obtenemos
f (x0 + th) − f (x0 ) − Df (x0 )(th)
≤ f (x0 + h) − f (x0 ) − Df (x0 )(h).
t
Como f es diferenciable, el lado izquierdo de la desigualdad va a 0 cuando
t → 0. Entonces
f (x0 + h) − f (x0 ) − Df (x0 )(h) ≥ 0,
es decir
f (x) ≥ f (x0 ) + Df (x0 )(x − x0 ).
Supongamos ahora que la desigualdad (4.3) es cierta para todo x0 , x ∈
K. Sean x1 , x2 ∈ K, x1 6= x2 , t ∈ (0, 1) y x = (1− t)x1 + tx2 . Demostraremos
que
f (x) ≤ (1 − t)f (x1 ) + tf (x2 ).
Tenemos
f (x1 ) ≥ f (x) + Df (x)(x1 − x)
y
f (x2 ) ≥ f (x) + Df (x)(x2 − x),
4. Puntos y valores extremos
75
ası́ que
(1 − t)f (x1 ) + tf (x2 )
≥ (1 − t) f (x) + Df (x)(x1 − x) + t f (x) + Df (x)(x2 − x)
= f (x) + Df (x) (1 − t)x1 + tx2 − x = f (x).
Como f (x0 ) + Df (x0 )(x − x0 ) es la aproximación lineal de f en el punto x0 , entonces el teorema 4.21 establece que una función diferenciable es
convexa si, y solo si, su gráfica se encuentra arriba de la gráfica de su aproximación lineal en cada punto.
4.
Puntos y valores extremos
En esta sección estudiaremos los puntos extremos de conjuntos convexos,
y su relación con los valores extremos (máximos y mı́nimos) de las funciones
convexas.
Definición 4.22. Sea K ⊂ Rn convexo. Decimos que x ∈ K es un punto
extremo de K si no existen x1 , x2 ∈ K, t ∈ (0, 1) tales que x = (1−t)x1 −tx2 .
Es decir, los puntos extremos de un conjunto convexo K son aquéllos
que no son combinaciones convexas no triviales de puntos en K. No es difı́cil
ver que los puntos extremos de K se encuestran en su frontera (ejercicio 14).
Proposición 4.23. Sea K ⊂ Rn convexo y compacto. Entonces todo punto
de K es combinación convexa de puntos extremos de K.
Demostración. Demostraremos esta proposición por inducción en n. Cuando n = 1, K es un intervalo cerrado, y la proposición es cierta porque, si
x ∈ [a, b], entonces
b−x
x−a
x=
a+
b.
b−a
b−a
Suponemos entonces que el resultado es cierto para n − 1. Sea K ⊂ Rn
convexo y compacto. Primero, tomemos x0 ∈ T
fr K. Sea P un hiperplano
de apoyo a K tal que x0 ∈ K ∩ P . Pero K P puede ser identificado
con un subconjunto convexo en Rn−1 (ejercicio 15). Por inducción, x0 es
combinación convexa de puntos extremos de K ∩ P , que a su vez son puntos
extremos de K (ejercicio 16).
Si x0 ∈ K 0 , sea L una recta que contiene a x0 . Entonces, como K es
convexo y compacto,
L ∩ fr K = {x1 , x2 },
y x0 es combinación convexa de x1 y x2 , que a su vez son, cada uno, una
combinación convexa de puntos extremos de K.
76
4. Convexidad
Corolario 4.24. Si f : K → R es continua y convexa en el conjunto convexo
compacto K, entonces su máximo ocurre en algún punto extremo de K.
Demostración. Si x ∈ K, entonces
m
X
t i xi ,
x=
i=1
donde
P
i ti
= 1 y los xi son puntos extremos de K. Entonces
f (x) ≤
donde
m
X
i=1
ti f (xi ) ≤
m
X
ti M = M,
i=1
M = sup{f (y) : y es punto extremo de K}.
Como f es continua, f toma su máximo, y entonces lo debe tomar en un
extremo.
La hipótesis de continuidad en el corolario fue utilizada para garantizar
que f toma su máximo en K, aunque no siempre es necesaria esta hipótesis.
Por ejemplo, si K es un polı́topo convexo compacto, entonces tiene solamente un número finito de puntos extremos (ejercicio 17). Ası́ que el máximo
de f sobre K es simplemente
M = máx{f (y) : y es punto extremo de K},
el cual siempre existe porque {f (y) : y es punto extremo de K} es finito.
Si f : Rn → R es lineal, entonces claramente es convexa. Si K ⊂ R es
convexo y compacto, sea M el máximo de f en K y definimos
K ′ = {x ∈ K : f (x) = M }.
Corolario 4.25. x ∈ K ′ si, y solo si, x es combinación convexa de puntos
extremos de K contenidos en K ′ .
P
P
Demostración. Sea x ∈ K ′ , y x = i ti xi , ti > 0, i ti = 1, donde los
xi son puntos extremos de K. Si f (xj ) < M para algún j, entonces, como
tj > 0,
X
X
M = f (x) =
ti f (xi ) ≤
ti M + tj f (xj ) < M,
i
i6=j
una contradicción. Entonces f (xi ) = M para todo i, es decir, xi ∈ K ′ para
todo i.
P
Si x = i ti xi , con xi ∈ K ′ para todo i,
f (x) =
k
X
i=1
ti f (xi ) = M,
77
Ejercicios
porque f es lineal y
P
i ti
= 1.
Ejercicios
1. Muestra que si P es un hiperplano de apoyo del conjunto convexo cerrado
K, entonces P ∩ K ⊂ fr K.
2. Termina la demostración del corolario 4.6.
3. Sea K ⊂ Rn un conjunto convexo cerrado no vacı́o tal que Rn \ K 6= ∅
es convexo. Muestra que K es un semiespacio cerrado.
4. Muestra que si x se puede representar como combinación convexa de
x0 , x1 , . . . , xr de dos formas distintas, entonces los vectores
x1 − x0 , x2 − x0 , . . . , xr − x0
son linealmente dependientes.
5. Sea x una combinación convexa de x1 , . . . , xm , y cada xj una combinación convexa de yj1 , . . . , yjmj . Muestra que x es una combinación convexa de de todos los yjk .
6. Sea S ⊂ Rn . Sea Ŝ la cerradura convexa de S: el conjunto de todas las
combinaciones convexas de puntos en S.
a) Muestra que Ŝ es convexo; y
b) Muestra que si K es convexo y S ⊂ K, entonces Ŝ ⊂ K.
7. Demuestra el lema 4.20.
8. Muestra que si f : K → R es convexa y
convexa de x1 , . . . , xr ∈ K, entonces
f
r
X
i=1
Pr
i=1 ti xi
es una combinación
r
X
ti f (xi ).
t i xi ≤
i=1
9. Sean f, g : K → R convexas y sea h : K → R dada por
h(x) = máx{f (x), g(x)}.
Muestra que h es convexa.
10. Sea f : K → R continua tal que
1
1
f (x1 + x2 ) ≤ f (x1 ) + f (x2 )
2
2
para todo x1 , x2 ∈ K. Muestra que f es convexa.
11. Sea f : (a, b) → R doblemente diferenciable. Entonces f es convexa si,
y solo si, f ′′ (x) > 0 para todo x ∈ (a, b).
78
4. Convexidad
12. Sean a, b > 0 y 0 < t < 1. Muestra que
a1−t bt ≤ (1 − t)a + tb.
(Sugerencia: Muestra que la función t → a(b/a)t es convexa utilizando
el ejercicio anterior.)
13. Muestra la desigualdad de Hölder: si x, y ∈ Rn , y p, q > 1 son tales que
1 1
+ = 1, entonces
p q
n
n
n
1/q
1/p X
X
X
|y i |q
.
|xi |p
|xi y i | ≤
i=1
i=1
i=1
(Sugerencia: Utiliza el ejercicio anterior.)
14. Muestra que si x es un punto extremo del conjunto convexo K, entonces
x ∈ fr K.
15. Sea P un hiperplano en Rn y x0 ∈ P . Muestra que existe una isometrı́a
ψ : P → Rn−1 tal que ψ(x0 ) = 0.
16. Muestra que si P es un hiperplano de apoyo del conjunto convexo K y
x es un punto extremo de K ∩ P , entonces x es un punto extremo de K.
17. Sea K un polı́topo convexo. Muestra que K tiene un número finito de
puntos extremos.
18. Muestra que un polı́topo compacto es la unión finita de simplejos. Si el
polı́topo tiene r vectores linealmente independientes, muestra que es la
unión finita de r-simplejos.