1. INTRODUCCIÓN. Raramente en el procesado de
Anuncio

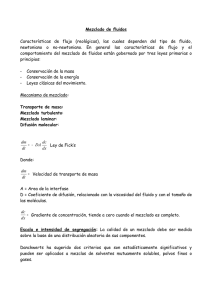
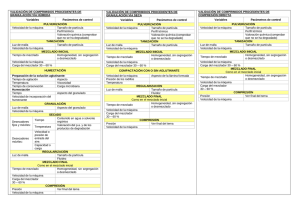
1. INTRODUCCIÓN. Raramente en el procesado de polímeros se utilizan éstos tal y como se reciben, si no que es necesario el empleo de aditivos (plastificantes, estabilizantes, antioxidantes, colorantes,...) o cargas. Las propiedades físicas, químicas, mecánicas o incluso estéticas del producto obtenido van a depender en gran medida de la uniformidad del producto final. Por mezclado se entiende aquella operación destinada a reducir la heterogeneidad de un sistema, cambiando la distribución de dos o más componentes que inicialmente se encuentran segregados, hasta conseguir una adecuada distribución de ambos. Por tanto es difícil imaginar una línea de procesado de polímeros en la que no esté involucrada el proceso de mezclado. Aunque en la realidad se suelen tratar sistemas constituidos por varios componentes, con objeto de simplificar el tratamiento se hablará únicamente de dos componentes. De esta forma, dicho proceso puede suponer la presencia de 2 líquidos, dos sólidos o una combinación de ambos, lo cual va a influir notablemente en la facilidad/dificultad de la operación; por ejemplo: - 2 sólidos: PE con negro de humo. - 2 fluidos: Mezcla polímeros fundidos. - Sólido+líquido: Mezcla de PVC y DOP. Antes de entrar a estudiar en detalle los mecanismos del proceso de mezclado, convendría considerar algunos términos referido al proceso de mezclado, y describir las unidades más comunes que se utilizan en el mezclado de polímeros. Aunque en castellano existan limitadas palabras para hacer referencia al mezclado en sí, en la bibliografía anglosajona, existen diversos términos empleados y cada uno de los cuales incluye ciertas connotaciones: - Compounding: Reblandecimiento, fusión, compactación de la matriz polimérica y dispersión de aditivos. - Blending: Procesos en que dos o más sustancias son mezcladas sin que cambie su estado de fase. - Kneading: Mezclado conseguido por compresión, y plegado en láminas de unas hojas sobre otras. - Milling: Combinación de “smearing”, “wiping” y probablemente molido. - Mulling: “Wiping” y “Rolling”. Mezcladores intensivos en seco. Los mezcladores intensivos en seco son usados para el mezclado de resinas, tales como las de PVC, con plastificantes y otros aditivos. Un mezclador típico consiste básicamente en una hélice situada en la base de un recipiente que gira a elevada velocidad (80-160rpm). El calor generado es eliminado en todo momento para estabilizar la mezcla seca y mejorar las propiedades de flujo. Figura 1. Esquema de una mezcladora discontinua en seco. Figura 2. Esquema de un mezclador de cinta. Mezcladores de cintas (Ribbon mixer). 1 Los mezcladores de este tipo dan lugar a un buen mezclado; el material es levantado y homogeneizado por las “cintas” que inducen su movimiento. Mezcladores estáticos. Este tipo de mezcladores es denominado estáticos debido a que el mezclado se consigue sin que haya ninguna parte móvil que se encargue de producir un movimiento en el fluido. En su lugar, inducen una reorganización del campo de flujo, de forma que la superficie interfacial aumenta cada vez que el fluido circula por cada uno de los elementos(como el de la Figura 3) que lo constituyen. Aunque hay de distintos tipos, todos ellos se basan en la repetición de una serie de elementos que inducen una reorganización del fluido, con el consiguiente aumento del área interfacial. Figura 3. a) Elemento unitario en un mezclador estático de tipo Ross b) y c) Mecanismo de mezclado en un mezclador tipo Ross. 2 Figura 3.d) Elementos unitarios en un mezclador estático de tipo Kenic e) Mecanismo de mezclado en un mezclador tipo Kenic. 3 Mezcladores intensivos internos por cargas. Esencialmente los mezcladores internos (Figura 4) consisten en cámaras cilíndricas en las que el material es deformado por rotación de unas cuchillas o rotores. En la mayoría de los casos la carcasa consiste realmente en dos cilindros adyacentes en los que hay insertados dos rotores que describen recorridos concéntricos con la carcasa. La capacidad de mezclado radica en dos hechos: la cizalla sobre el material que hay entre la carcasa y la cuchilla que gira y la mezcla y el plegamiento con el material procedente de la otra carcasa. El mezclado puede mejorarse si las cuchillas son helicoidales de forma que existe un espaciado constante entre ambas. El principio sobre el mezclador interno fue introducido en 1916 con el desarrollo del mezclador Banbury. El mezclador consiste en dos cámaras unidas en las que dos cuchillas helicoidales operan; se alimenta el material mediante una tolva. Figura 4. Esquema de un mezclador intensivo tipo Banbury. Una alternativa al Banbury de mezcladores de este tipo lo constituyen los mezcladores con cuchillas tipo Z. 4 Figura 5. Esquema de un mezclador intensivo con cuchillas tipo z. Calandras. Consisten en dos cilindros que giran en sentido opuesto y dispuestos uno cerca del otro de forma que existe un espaciado constante entre ambos (Figura 6). Normalmente se escoge una temperatura a la cual el polímero a mezclar se adhiere a uno de los cilindros en una capa muy fina. Los cilindros son calentados o refrigerados mediante un fluido que circula por el interior de dichos cilindros. Durante el mezclado la banda obtenida es cortada y manualmente introducida de nuevo. Figura 6. Esquema de una calandra; formación de la banda en uno de los rodillos. Extrusoras. Aunque las extrusoras de un solo husillo (Figuras 7-8) son un equipo empleado para el moldeado de termoplásticos, éstas también pueden funcionar como mezcladoras, ya que se somete al material a una deformación de flujo laminar. De esta forma, aunque la extrusora no se emplea principalmente como mezcladora, es normal añadir ingredientes a una resina durante su extrusión en fundido y de este modo aprovechar la acción inherente de mezclado de la extrusora. En los mezcladores continuos los rotores y la acción de mezcla son similares a los del Banbury. El material 5 de partida es automáticamente alimentado por la tolva a la primera zona del rotor que impulsa al material hacia la zona de mezclado donde una intensa cizalla entre el rotor y las paredes de la cámara es la encargada de su mezclado. Normalmente es necesario un premezclado previo al mezclador continuo El mezclado que un cierto volumen de resina consigue ser mezclado depende de la cizalla que ha recibido y del tiempo de residencia dentro de la extrusora; la cizalla impuesta a la muestra dependen de su posición inicial en el canal del tornillo, ya que cuanto más cerca esté de la posición central menos va a ser su tiempo de residencia y menos cizalla va a recibir(espacios muertos). Las extrusoras tienen la ventaja de que permiten grandes cargas ininterrumpidas, de gran uniformidad, fácil control de calidad y reducido coste energético, pero posee principalmente la desventaja de bajo poder de dispersión y una menor flexibilidad a la hora de cambiar las mezclas. Figura 7. Esquema de una mezclador continuo de un husillo. Detalle del husillo. 6 Figura 8. Extrusora de un husillo. Otra posibilidad de extrusora(Figura 9) es la de doble husillo, en la que dos tornillos corotatorios (también las hay contrarotatorias) son dispuestos de forma que el material que circula por uno de los tornillos es barrido por el otro. De esta forma no hay espacios muertos y la distribución de tiempos de residencia y mezclados conseguidos son más uniformes. Figura 9. Esquema del funcionamiento de una extrusora de doble husillo. 2. CARACTERIZACIÓN DE LAS MEZCLAS . 2.1. Mecanismos del mezclado. 7 Los mecanismos básicos de la operación de mezclado son tres: DIFUSIÓN MOLECULAR: Se lleva a cabo el transporte de materia como consecuencia de la diferencia de concentración entre dos puntos (ley de Fick); es el mecanismo dominante en mezclas de líquidos y gases de baja viscosidad. MEZCLADO como consecuencia del movimiento aleatorio de turbulencias en el seno del fluido (difusión de remolinos). MEZCLADO distributivo o por convección; se produce el movimiento de grupos de molecular o porciones del fluido de tamaño apreciable. Por ejemplo, cuando echamos leche en un café, ¿qué mecanismos se dan?: Inicialmente, antes de introducir la cucharilla, se da DIFUSIÓN MOLECULAR, una vez introducida la cucharilla y se agita el café, CONVECCIÓN. Sin embargo, si agitamos un poco de forma que se forman vetas de leche en el café y dejamos de agitar, se producirá una difusión de remolinos. Dada la elevada viscosidad en sistemas poliméricos, los dos primeros tipos de transporte apenas se dan, y es el mezclado por convección el mecanismo dominante. Sin embargo hay ocasiones, cuando hay un componente de muy bajo peso molecular(algunos antioxidantes, colorantes, espumantes) en los que se puede producir la difusión molecular, afectando a la efectividad del mismo. El mezclado por convección puede ser de dos tipos (Figura 10): a) Aleatorio. b) Ordenado, como en los mezcladores estáticos. 8 Figura 10. Representación esquemática de mezclado distributivo: a) Aleatorio b) Ordenado. Pero en cualquier caso lo que se pretende es aumentar la superficie interfacial entre ambos componentes hasta conseguir que en cualquier unidad de volumen la relación entre ambos es igual que en la mezcla global. Figura 11. Mezclado laminar en el flujo a través de una tubería. Sin embargo, el mezclado también puede clasificarse en: 9 - Mezclado extensivo o distributivo o convectivo o repetitivo osimple o “blending”, en el que se reduce la inuniformidad del sistema sin alterar el estado inicial del mismo, consiguiéndose mediante redistribuciones y deformaciones, pudiendo darse incluso en régimen laminar (Figura 11). Considerando una conducción por la que circula un fluido, y en la que se inyecta un pulso de otra sustancia; como consecuencia del flujo el área interfacial comienza a aumentar; este caso es un ejemplo en el que el mezclado depende de la deformación aplicada, y no de la velocidad de deformación o esfuerzo de deformación - Mezclado intensivo o dispersivo o “Compounding”, referido a procesos en los que es necesario romper agregados de un determinado material, siendo de gran importancia el esfuerzo o velocidad de deformación aplicada, puesto que es necesario romper las partículas o agregados de algún componente. En este caso se define el término de tamaño de partícula final, que es tamaño de partícula más pequeño del componente minoritario que existe en el sistema. 2.2. Caracterización del estado de mezcla. Una vez que el mezclado ha concluido, el ingeniero debe ser capaz de responder a la pregunta: “¿la efectividad del mezclado ha sido satisfactoria?. Para la caracterización de las mezclas se requeriría en el caso ideal la caracterización del tamaño, forma, orientación y localización espacial de cada partícula o grupo de partículas del componente minoritario, pero en la práctica el análisis no es tan exhaustivo, y basta con la observación del color. Pero si se requiere un examen más o menos exhaustivo para caracterizar la calidad del mezclado habría que estimar la uniformidad de la mezcla global, estudiando la distribución del componente minoritario a través del objeto o sistema analizado. Por ejemplo, consideremos una línea de fabricación de bolsas de plástico; aunque cada paquete de bolsas presente una misma composición global, el análisis de cada bolsa podría ser distinto, poniendo de manifiesto la falta de uniformidad del sistema. 10 Con este ejemplo se pone de manifiesto la necesidad de introducir el tamaño de la escala de examinación, es decir el tamaño de la muestra a analizar; lógicamente debe de ser pequeño comparado con la escala que se está estudiando, pero debe ser lo suficientemente grande con respecto a la partícula más pequeña. Por otra parte, la no homogeneidad de los productos(en este caso) se manifiesta en la presencia de una cierta textura, que aparece tras el proceso de mezclado, y que debería de ser caracterizada. Por otra parte, el tipo de textura puede ser en gran medida la responsable de las propiedades del producto acabado(por ejemplo, la textura de carbonato cálcico en PVC). Pero para la caracterización de las mezclas, el análisis de puntos individuales no nos ofrecería gran información sobre la textura. Por ejemplo, las dos texturas que aparecen en la figura 12 han sido obtenidas de forma que la concentración global de puntos es la misma en ambas, siendo la única diferencia la disposición de los puntos. Figura 12. Diferentes texturas con la misma concentración de puntos. En su lugar lo que se puede hacer es llevar a cabo un proceso mental de lanzar un dipolo (una aguja), observando la frecuencia con que ambos lados del dipolo dan en zonas con puntos, en blanco o combinados. 2.2.1. Uniformidad global. Una perfecta uniformidad global supone que el componente minoritario se encuentre en una concentración uniforme en todas las muestras tomadas, pero normalmente no se obtiene una perfecta uniformidad global, que viene determinada en gran medida por las condiciones del proceso de mezclado. En un proceso aleatorio, la máxima uniformidad que es posible alcanzar viene dad por una distribución de tipo binomial: 11 b(k; n, p ) = n! n −k p k (1 - p ) k! (n - k )! donde p es la fracción del componente minoritario, n es el número de partículas extraidas, y b(k;n,p) es la fracción de muestras con k partículas del componente minoritario.. y la varianza de la distribución: σ2 = p (1 - p) n Figura 13. Distribución binomial con p=0.5 y 2 tamaños de muestra a) n=10 b) n=100. Conforme va creciendo n la distribución se va haciendo más estrecha, hasta el punto que para n=∞, σ=0. Una distribución binomial se aproxima a una Gaussiana si el número de muestras es grande: np>5 y p<0.5. Entonces la fracción b puede ser calculada mediante: b= 1 e σ 2π ⎡ ( x − p )2 ⎤ −⎢ ⎥ 2 ⎣⎢ 2 σ ⎦⎥ que si es bastante pequeña, puede ser obtenida mediante la distribución binomial de Poisson: 12 b = e − np (np )b (b )! En la práctica se toma un limitado número de muestras, N, por lo que el valor medio de C, , puede ser calculado mediante la expresión: C = 1 Ni N ∑C i =1 i donde Ci es la concentración de la muestra i. La varianza s2 puede ser calculada como: s2 = 1 N (Ci − C )2 ∑ n − 1 i =1 Si el procedimiento de muestreo ha sido el adecuado, entonces el valor medio de la concentración y b deberían de estar muy próximos. Los valores de la media y la varianza han de ser calculados con ayuda de métodos estadísticos, como los “ensayos de confianza”. Los intervalos de confianza expresan el porcentaje de veces que el valor medio verdadero (no conocido a priori) y la desviación standard están dentro de un intervalo. Así, por ejemplo, el intervalo de confianza para un valor medio μ, podría ser expresado como: C −z s s <μ<C + z N ≥ 30 N N donde z es el coeficiente de confianza que es leído de las tablas de distribuciones normales. También podría emplearse: C −t s s <μ <C +t N < 30 N N , donde t es obtenido a partir de la distribución t con N-1 grados de libertad. También puede emplearse los conocidos ensayos de significancia, para comparar muestras con algún material de referencia que debería estar perfectamente mezclado; de este modo el valor medio y la varianza de las muestras son calculadas con las expresiones anteriores ( C y s ); Estos datos junto con el valor medio y la desviación standard de la referencia ( μ y σ 2 ). Si N<30 se calcula un valor de t: 13 t= C −μ σ N Este valor calculado se compara con el valor tabulado de t de Student para N-1 grados de libertad y el nivel de significancia escogido. La hipótesis que la muestra media es la misma que la población media μ es revalidada si el valor calculado de t es menor que el tabulado. Las pruebas o ensayos de significancia son también importantes en casos en los que hay que decidir si dos muestras de tamaño N y M con varianzas s N2 y s M2 pertenecen o no a la misma muestra. La hipótesis de que 2 muestras vienen de la misma mezcla es comprobada por medio de la distribución F: F = s s 2 N 2 M con N-1 y M-1 grados de libertad respectivamente. Por ejemplo, para probar esta hipótesis con un nivel del 10%: F0.05 ≤ s N2 1 ≤ F0.95 , F0.95 = 2 F0.05 sM De este modo, la estadística es también útil para evaluar el grado de mezcla; es obvio que el objetivo del mezclado es producir una mezcla con una distribución lo más aleatoria como sea posible. El término de mezcla perfecta se refiere al hecho de que la probabilidad de encontrar el componente minoritario en cualquier parte de la mezcla sea el mismo. Por tanto, el grado de mezcla mide la distancia entre el estado de mezclado de nuestra mezcla y aquel de la muestra distribuida al azar y que se representa matemáticamente con un índice de mezcla M como cualquiera de los que aparecen en la tabla 1, y definiendo σ 02 como la varianza en un estado totalmente heterogéneo. 14 Tabla 1. Diferentes índices de mezclado empleados en la caracterización de mezclas. Algunos autores han estudiado la velocidad de mezcla empleando el índice de mezcla como si se tratara de una reacción de orden 1. Lacey desarrolló la siguiente expresión: M = 1 − e − KT donde k es una constante cinética. 2.2.2. Textura. Considérese una textura del tipo de un tablero de ajedrez, con casillas oscuras y claras (Figura 14). La textura puede ser caracterizada a partir de dos parámetros: escala de la segregación (la longitud del cuadrado) y la intensidad de la segregación (intensidad del color), como se observa en la Figura 14. 15 Figura 14. Representación esquemática de la escala y la intensidad de la segregación. De esta forma se podría conseguir un mezclado perfecto reduciendo la textura mediante dos métodos: Reduciendo la escala de la segregación y/o reduciendo la intensidad de la segregación. 2.2.2.1. Escala de segregación. Se define como escala de segregación s: ξ s = ∫ R (r ) dr 0 donde h es la distancia a la cual R=0, y R es el coeficiente de correlación entre dos puntos separados entre si por una distancia r. El valor de R puede oscilar entre 1 (cuando ambos puntos tienen la misma composición) hasta –1, cuando un punto del dipolo sería componente mayoritario y el otro minoritario puros. La definición del coeficiente de correlación viene dada por la expresión: N R (r ) = ∑ i =1 (x ! i )( − x x !i! − x N S2 ) 16 donde x y x son la concentración en los dos extremos del dipolo, N es el número de pares(dipolos) tomados y S2 es la varianza: ∑ (x 2N S2 = i =1 − x) 2 i 2 N −1 Sin embargo, la ecuación anterior posee poco sentido físico, y debería ser transformada. En una textura formada por dos composiciones x1 y x2. Siguiendo un proceso mental de lanzamiento de dipolo encontramos que k11 caen de forma que ambos extremos están en 1; k12 de forma que un extremos cae en 1 y el otro en 2; y k22 de forma que ambos extremos caen en 2: N=k11+k12+k22. Demostrar que para este caso: R(r ) = Ψ11 φ2 φ + Ψ22 1 − Ψ12 φ1 φ2 17 Donde Φ2 es la fracción de superficie de la zona 2, Φ1 la de la zona 1, y Ψ11 y Ψ12 es la probabilidad de que ambos extremos del dipolo caigan en 1 o en 2 respectivamente, 12 la probabilidad de que caigan en 1 y en 2. Figura 15. Esquema de una textura formada por estrías. Para una textura como la de la figura 15 la expresión para el coeficiente de correlación sería (demostrarlo): 18 ⎛ L + L2 R (r ) = 1 − r⎜⎜ 1 ⎝ L1 L 2 ⎞ 2L1 L 2 ⎟ r≤ ⎟ L1 + L 2 ⎠ Por lo tanto la escala de segregación s, se calcularía: L1L 2 L1 + L 2 0 s=∫ R (r )dr = 1 ⎛ L1 + L 2 ⎜ 4 ⎜⎝ L1 L 2 ⎞ 1 ⎟= L ⎟ 4 ⎠ el resultado obtenido muestra que s es independiente de la concentración de las dos zonas, como cabría esperar, puesto que la escala de segregación sólo refleja el tamaño de las regiones donde predomina uno u otro componente. El concepto de escala de segregación se convierte en una medida de la textura en casos complejos donde el espesor de las estrías no puede ser especificado, como en el caso de la figura 16. Figura 16. Textura no ordenada formada por dos concentraciones distintas de un componente minoritario. 2.2.2.1. Intensidad de la segregación. Se define como la intensidad de la segregación como: I= S2 σ o2 que expresa la relación de la varianza dividido por la de un sistema totalmente segregado; de esta forma I=1 para un sistema totalmente segregado e I=0 para un sistema de conc. uniforme. Por ejemplo en un sistema formado por Φ1 de x1 y Φ2 de x2 : 19 x = φ1 x1 + φ 2 x 2 y S 2 = φ1 (x1 − x ) + φ 2 (x 2 − x ) 2 2 σ o2 = φ1 (1 − φ1 ) = φ1 φ 2 (x − x ) + ( x 2 − x ) = ( x − x ) 2 φ (x − x ) + φ 2 (x 2 − x ) = 1 I= 1 1 1 2 φ1 φ 2 φ2 φ1 2 2 2 2 s 2 = φ1 (1 − φ1 ) + φ 2 (φ1 ) = φ1 (1 − φ1 ) + (1 − φ1 )(φ1 ) 2 2 2 2 Claramente I no depende de la escala de la segregación y refleja la desviación de la concentración de una medida respecto a otra. 3. CARACTERIZACIÓN DEL PROCESO DE MEZCLADO. Una vez concluido el proceso de mezclado, uno de los objetivos a plantearse es sbaer cómo de bien se ha efectuado el proceso de mezclado. La medida de la varianza indica la calidad del mezclado; si la mezcla es homogénea, la varianza será pequeña y la concentración prodeio será próxima al valor medio C . Para medir la varianza es necesario tomar muestras del equipo de mezclado o bien del producto final (por ejemplo en la bibliografía se toman muestras con una jeringa y posteriormente se analizan los cortes del cilindro extraido); a continuación se analiza el contenido en un determinado aditivo por medio de conductividad, valoración, recuento de partículas o transmisión de luz. Todo ello supone, como cabe de esperar un gran trabajo. Como ya se ha comentado anteriormente, dada la elevada viscosidad de los polímeros fundidos, apenas se da un mezclado por difusión y es fácilmente identificable la superficie de separación entre una fase y otra. Por lo tanto, la superficie entre ambas fases puede ser una medida del grado de mezclado conseguido; la superficie interfacial por unidad de volumen está relacionada con el conocido espesor de estrías: δ= 1 Av , que se define como la mitad del espesor de la unidad repetitiva. 20 2δ Figura 17. Espesor de una estría. Conforme va teniendo lugar el proceso de mezclado, el área intefacial por unidad de volumen aumenta y el espesor de las estrías disminuye. A continuación se mostrará como se reduce el espesor de las estrías en función de consideraciones geométricas. 3.1. Mezclado Distributivo y Aleatorio. La Figura 10a) representa un ejemplo típico de mezclado distributivo, que se consigue principalmente en mezcladores estáticos. En este tipo de mezclado de mezclado “ordenado” el proceso en sí y la calidad del mezclado pueden caracterizarse mediante el “espesor” de la estría definido aquí como r: r= V A 2 donde V es el volumen de la muestra y A el área superficial. El valor numérico de r en un mezclador estático es inversamente proporcional al número de capas creadas por el mezclador. El proceso de mezclado tiene lugar reduciendo el espesor de la estria hasta un valor determinado. Mientras que el mezclado distributivo puede ser fácilmente caracterizable, el mezclado aleatorio no puede serlo. En el mezclado distributivo al azar normalmente se intenta caracterizar la desviación de la uniformidad global de un estado totalmente aleatorio. 3.2. Mezclado laminar. 21 Cuando se mezclan 2 líquidos el área interfacial entre ambos aumenta, y dicho aumento podría ser empleado para caracterizar el proceso de mezclado. Esta sección tratará la relación entre un elemento de área superficial y la deformación total aplicada sobre el fluido. Consideremos una superficie en un campo de cizalla simple: • v x = γ yx y Figura 18. Elemento de superficie comprendido entre los vectores P1 y P2 en un campo de cizalla simple. A t=0 el área definida por los vectores P1 y P2 (Figura 18) es: Ao = 1 1 P1 × P 2 = c 2 2 donde c es el vector normal a la superficie. Los ángulos que dicho vector forma con los ejes: Cos α x = Cx C Cos α y = Cy C Cos α z = Cz C Si a un determinado tiempo el área A0, es deformada con relaciones de elongación λx, λy y λz, los nuevos vectores P1 y P2 darán lugar a un cambio en el área: A= 1 ' 1 P1 × P2' = c' 2 2 22 De esta forma, es posible demostrar que el cambio experimentado por el área con el tiempo sigue la expresión: 2 ⎡ A⎤ 2 2 2 ⎢ ⎥ = (λ y λ z cos a x ) + (λ z λ x cos a y ) + (λ x λ y cos a z ) ⎣ A0 ⎦ Si se asume que se trata de un material incompresible: λ xλ yλ z =1 Entonces el cambio de área puede expresarse como: 2 ⎡ A⎤ ⎛ cos a x ⎢ ⎥ = ⎜⎜ ⎣ A0 ⎦ ⎝ λx ⎞ ⎛ cos a y ⎟⎟ + ⎜ ⎜ ⎠ ⎝ λy 2 2 ⎞ ⎛ cos a z ⎟ +⎜ ⎟ ⎜ λ z ⎠ ⎝ ⎞ ⎟⎟ ⎠ 2 3.2.1. Extensión plana. 23 3.2.2. Cizalla simple. 24 25 3.2.3. Extensión uniaxial. 26 El papel de la orientación inicial es evidente, puesto que el aumento en el área interfacial es máximo si el área está en el plano YZ (Cos x=1, Cos y=0). No hay cambio en el área si Cos x=0 o Cx=0. En un proceso de mezclado pseudo aleatorio la dirección de la cizalla está cambiando constantemente, reduciendo en alguna forma la desventaja del flujo unidireccional. EJEMPLO 1. El efecto de la orientación y disposición inicial en la efectividad del proceso de mezclado. Para conseguir un óptimo mezclado el área interfacial en un flujo unidireccional es perpendicular a la dirección de la cizalla. Por ejemplo, consideremos un mezclador cilíndrico concéntrico, donde se añade una cierta cantidad de un componente minoritario a mezclar con otro mayoritario (Figura 19). Por ejemplo, en el caso a) no se espera mezclado, mientras que en el caso b) esto sólo se consigue tras un cierto número de vueltas. Si sin embargo se encuentra en la situación c) se consigue un incremento parcial del área interfacial por reordenación del componente minoritario a lo largo de las líneas de flujo. En este caso la distribución del componente minoritario se llevaría a cabo si se dispone al componente minoritario de forma que corte todas las líneas de flujo. Sin embargo en mezcladores donde el flujo no es tan definido, esto es, aleatorio, la disposición inicial y orientación es menos importante. Si el alimento es un sólido, un premezclado da lugar a una disposición inicial y orientación inicial aleatoria. Figura 19. Distribución de un componente tras el mezclado, dependiendo de su orientación inicial. 27 Figura 20. Mezclado conseguido según la orientación de la superficie. EJEMPLO 2. Orientación óptima del elemento interfacial durante la deformación. En los ejemplos vistos hasta ahora se ha considerado que los elementos interfaciales se encuentran en la disposición inicial, pero es posible mejorar el proceso de mezclado si se reajustara la orientación en una dirección preferente. Derivando la ecuación () se obtendría la relación: − Cosα x Cosα y + γCos 2 α x dA = AO dγ 1 − 2γCosα x Cosα y + γ 2 Cos 2 α x ( Si γ = 0, ) 1 2 dA = − ACosα x Cosα y ; A = A O dγ El valor de cosα x cosα y es máximo para cosα z = 0, α y = 45º y α x = 135º , esto es, el elemento de área interfacial está a 45º con la dirección de cizalla, cumpliéndose: γ dA A = ⎯ ⎯→ A = A O e 2 dγ 2 La figura 20 compara el incremento del área superficial en cizalla simple con una orientación inicial óptima y un flujo de cizalla simple donde el comienzo de cada paso el elemento de área interfacial es dispuesto 45º con respecto a la dirección de la cizalla; en el primer caso se consigue un A de 4.1, mientras que en el segundo de 6.1. Ao 28 En un sistema de mezclado aleatorio la dirección de la cizalla está continuamente cambiando, reduciendo la desventaja de una cizalla unidireccional. Entre los dos extremos de tipo de flujo vistos(el de un mezclador aleatorio, y el de un mezclador cilíndrico con líneas de flujo cerradas) existe un gran número de casos prácticos en los que se podría clasificar los casos reales, en los el flujo es más complejo. Sin embargo, en sistemas en 3D(Figura 21) en los que los elementos de área interfacial están más probablemente en una disposición aleatoria, considerando una superficie inicial Ao, hay una colección de vectores C apuntando aleatoriamente a todas las direcciones. La fracción de vectores apuntando en una cierta dirección viene dada por la relación de un área de superficie en una esfera de radio r entre el área total de la esfera: Figura 21. Orientación tridimensional de un elemento de superficie. 29 Por tanto la relación A en un sistema de partículas orientadas al azar se cumple la Ao ecuación anterior para γ>>>0. Por tanto, elementos cúbicos de un componente minoritario en uno mayoritario, dispuesto al azar pueden ser considerando como si fuera un sistema de áreas interfaciales de igual tamaño y distribuidas al azar. El espesor medio de estriación viene dado por la ecuación: r= V V 2 = = A A Ao A Ao 2 Ao 2 Ao V 30 Y para un cubo en el que hay una concentración Xv del componente minoritario: Ao 6 L L 6 Xv Xv = = V LLL L Por tanto r = 2 L 2r = o 3 γ Xv 3 γ La relación obtenida claramente indica que el espesor de la estriación es inversamente proporcional al tamaño del cubo e inversamente proporcional a la fracción volumétrica del componente minoritario. Por tanto, para un espesor de estriación requerido convienen las partículas más grandes, la menor fracción volumétrica del componente minoritario y la mayor deformación. Por tanto, es más difícil mezclar una pequeña cantidad del componente minoritario que hacer una mezcla 50-50, al igual que si se emplean partículas grandes. Usando la ecuación anterior se puede estimar la deformación necesaria para reducir el espesor de las estrías hasta un nivel molecular o movimientos Brownianos que terminen por homogeneizar la mezcla para una dada velocidad de deformación y tiempo de residencia. 3.3. Reducción del espesor de las estrías en base a consideraciones cinemáticas. Una forma más sistemática de representar matemáticamente el proceso de mezclado es mediante consideraciones cinemáticas. Supóngase que se está procesando un polímero en una mezcladora que deforma las partículas del fundido. A un tiempo t=0 se identifica una linea del material a una posición x0 de longitud dx0 y con orientación m0. Una vez que se ha aplicado una deformación al fundido, se identifica la misma línea con una posición x, longitud dx y orientación m. La contracción lineal se define como: λ= dx dx 0 La deformación aplicada es caracterizada por medio del tensor gradiente de deformación: Fij = ∑∑ i j ∂x i ∂x oj A partir de este vector es posible calcular el tensor de deformaciones relativas de CauchyGreen, C: 31 ( ) C ij = ∑ ∑ F T i ij j F jl = ∑ j ∂x j ∂x j ∂x oi ∂x ol Entonces la deformación lineal puede ser calculada como: ⎛ ∂x j ∂x j λ2 = ∑∑ ⎜⎜ ∑ i l ⎝ j ∂x oi ∂x ol ⎞ ⎟ mol moi ⎟ ⎠ ij y la velocidad de extensión: λ& 1 = ∑∑ (γ& ij )ij m j mi λ 2 i l donde γ& ij son las componentes del tensor velocidad de deformación γ& y las componentes del vector m vienen dadas por: mi = 1 ∑ Fij ij mOj λ j La eficiencia del proceso de mezclado eL, que se relaciona con la deformación lineal , viene expresada por: eL = 2 λ& λ ∑∑ γ& kl γ& lk k l mientras que la eficiencia media: eL = 1 t e L (t ' )dt´ t ∫o Como se puede demostrar, la cizalla simple no es un medio de mezclado muy efectivo, aunque se encuentre presente en muchas operaciones de mezclado, como por ejemplo una extrusora de simple husillo. Sin embargo, éste puede mejorar notablemente incorporando secciones de mezclado, en forma de conductos y obstáculos que consiguen aumentar el área interfacial. 32 3.4. Funciones de distribución de deformaciones. Puesto que la deformación aplicada influye en el mezclado conseguido, está claro que en la mayoría de los procesos de mezclado industriales diferentes partes del fluido sufrirán diferentes deformaciones. Esto ocurre tanto en mezcladores continuos como en discontinuos. En los primeros las diferentes deformaciones son debidas a diferentes caminos que las partículas pueden seguir en el mezclador, mientras que en los mezcladores continuos hay diferentes tiempos de residencia para cada partícula del fluido. A continuación se estudiará con mas detalle algunos tipos de mezcladores. 3.4.1. Mezcladores discontinuos En los mezcladores discontinuos las velocidades de cizalla a través del mezclador no son uniformes, ni los tiempos de residencia. En consecuencia, después de un cierto tiempo, diferentes partículas del fluido sufrirán diferentes evoluciones y diferentes deformaciones acumuladas. La función de distribución de deformaciones (SDF) g (γ )dγ se define como la fracción del líquido en el mezclador que ha sufrido una deformación comprendida entre γ y γ + dγ . Integrando g (γ )dγ se obtiene la SDF: γ G (γ ) = ∫ g (γ )dγ 0 donde G (γ ) es la fracción del líquido que ha sufrido una deformación menor de γ . El valor medio de la deformación es: γ=∫ γ max 0 γ g(γ )dγ Tanto g (γ ) y G (γ ) dependen de la geometría del mezclador, condiciones proceso, reología del fluido.... EJEMPLO 3. LA SDF en un mezclador de 3 cilindros. 33 Figura 22. Esquema de un mezclador de tres cilindros. El líquido a mezclar es situado entre los cilindros. La SDF impuesta al líquido depende de la posición del cilindro medio. Despreciando el efecto de la curvatura, las velocidades de cizalla en las zonas 1 y 2 son constantes, y la deformación después de un tiempo t vienen dadas por las expresiones: La fracción del volumen total del mezclador ocupada por la zona 1: Y en la zona 2: φ 2 = 1 − φ1 . Finalmente la deformación media viene dada por la expresión: 34 γ = φ1 γ 1 + φ 2 γ 2 EJEMPLO 4. La función de distribución de esfuerzos en un mezclador de cilindros concéntricos. Consideremos dos cilindros concéntricos de radios Re y Ri, Re>Ri. A un cierto tiempo tiempo el cilindro interno comienza a girar con una velocidad angular constante Ω. Suponiendo un flujo laminar, despreciando el efecto de la fuerza centríguga y de la gravedad, la velocidad viene dad por la expresión (VER ANEXO): vθ β 2s − ρ 2s = 2s 2s Ω Ri ρ ρ β −1 ( donde vθ es la velocidad tangencial, ρ = r Ri , β= ) Re Ri y s = 1 , donde n es el exponente n de la ley de potencias. La velocidad de deformación y la deformación: • γθ = − 2 s β 2s Ω ρ 2s (β 2s − 1) 2 s β 2s Ω t γ (ρ) = 2s 2s ρ β −1 ( ) Y la relación entre las deformaciones máxima y mínima: γ max = β 2s γ min El espesor de las estrías es inversamente proporcional a la deformación total, y por tanto la relación del espesor de las estrías entre el radio externo y el interno es: re γ max = = β 2s ri γ min 3.3.1. Mezcladores continuos. En mezcladores continuos hay partes del fluido que sufren tanto diferentes cizallas como tiempos de residencia; por tanto, han adquirido distintas deformaciones. Siguiendo con la definición de SDF, y paralelo a la definición de distribución de tiempos de residencia, la función SDF para un mezclador continuos f (γ )dγ se define como la fracción del fluido que sale y ha sufrido una deformación comprendida entre γ y γ + dγ , o también se define como la probabilidad de que 35 una partícula del fluido que entra salga con aquella deformación. La SDF acumulada F(γ ) se define de acuerdo con la ecuación: γ F(γ ) = ∫ f (γ )dγ 0 y la deformación media: ∞ γ = ∫ γ f (γ )dγ γ0 La SDF como la función RTD pueden ser calculadas a partir de la distribución de velocidades en el sistema; un cierto campo de flujo determina ambas funciones. Por ejemplo, consideremos el flujo de un determinado polímero en un mezclador helicoidal; la RTD puede ser calculada a partir de la velocidad axial, pero la SDF requiere además la velocidad tangencial. Por tanto, la SDF no puede ser calculada a partir de medidas experimentales de RTD. Ejemplo 2. LA función de distribución de deformaciones en un flujo de platos paralelos. Figura 23. Flujo en un sistema de platos paralelos. Dos platos paralelos con el movimiento relativo de uno respecto al otro puede ser visto como un mezclador continuo ideal. Un plano perpendicular a los platos da la entrada al mezclador, de longitud L. Asumiendo que un fluido entra al espaciado entre ambos platos no tiene una historia de deformación y que el flujo entre ambas láminas está en Régimen Estacionario. El espaciado H controla el tiempo de residencia, y a menores tiempos de residencia, menores deformaciones aplicadas. La velocidad para un flujo totalmente desarrollado viene dad por la expresión: vx = y Vo (Perfil lineal de velocidades) H Y el caudal por unidad de longitud transversal: 36 Vo H 2 q= H H 0 0 Vx H = ∫ Vx dy = ∫ y VO dy H Y la fracción del fluido entre y e y +dy: f (y )dy = dq 2 y dy = q H2 Y la fracción del fluido en la zona mayor de y: F(y ) = ∫ f (y )dy = 1 − H y y2 H2 La velocidad de cizalla: • γ= el tiempo de residencia: t = V dVx = O dy H L HL = Vx V O y La deformación como una función de y: • γ=γt= VO H L VO H y = L y Por tanto: 2 ⎛ L ⎞ ⎟⎟ F(γ ) = 1 − ⎜⎜ ⎝ Hγ ⎠ 2L2 dF(γ ) f (γ )dγ = 2 3 dy = dγ H γ γ=∫ H o ⎛ γ ⎞ L γf (γ )dy = 2 ⎯ ⎯→ F(γ ) = 1 − ⎜⎜ ⎟⎟ H ⎝ 2γ ⎠ 2 Como se aprecia en los resultados, la deformación media es proporcional a la relación L . H Para un buen mezclado, la separación debe ser pequeña y L grande. 37 El significado de la SDF puede ser obtenido siguiendo simultáneamente la reducción del espesor de las estrías y las velocidades de flujo en varios puntos situados a cualquier distancia entre ambos platos. Consideremos dos elementos cúbicos de componente minoritario separados por una distancia r0. Siguiendo la deformación y la separación entre las partículas con el tiempo, la figura 7.24 muestra los cambios sufridos en distintas capas (10) en las que se ha dividido el flujo a través del plato. Como se observa el mezclado es poco uniforme..... Figura 24. Funciones de distribución de deformaciones en un tubo y en unos platos paralelos. Figura 25. Deformaciones de elementos de un fluido situado entre dos platos paralelos. 3.3.3. Distribución de tiempos de residencia. 38 La determinación de la distribución de tiempos de residencia juega un papel muy importante a la hora de caracterizar el proceso de mezclado, ya que gran cantidad de aditivos, e incluso el propio polímero pueden sufrir procesos de degradación, envejecimiento, reticulación,.... que conviene controlar. La definición de RTD engloba dos posibles acepciones: 1. g (t )dt ⎯ ⎯→ Función int erna 2. f (t )dt ⎯ ⎯→ Función externa La función interna representa la fracción del fluido en el sistema con un tiempo de residencia entre t y t+dt. Sin embargo, la función externa representa la fracción del fluido que sale con un tiempo de residencia entre t y t+dt. A partir de estas definiciones se definen las funciones acumuladas: G (t ) = ∫ g (t )dt t 0 F(t ) = ∫ f (t )dt t 0 cumpliéndose: G (∞ ) = F(∞ ) = 1 Si Q es el caudal volumétrico que sale y dQ la fracción volumétrica con un tiempo de residencia entre t y t+dt, entonces la función de distribución de tiempos de residencia puede ser calculada mediante la expresión: f (t )dt = dQ Q Para obtener una relación entre las funciones de RTD es necesario llevara cabo un balance de materia: Q − Q(t ) = d [VG (t )] dt Si el caudal y el volumen del mezclador son constantes, entonces es posible definir su cociente como tmedio. 39 g (t ) = 1 − F (t ) t medio El tiempo medio en el interior de un mezclador viene dado por la expresión: ∞ t i = ∫ tg (t )dt 0 40