Comparación entre diferentes procedimientos de ajuste de
Anuncio

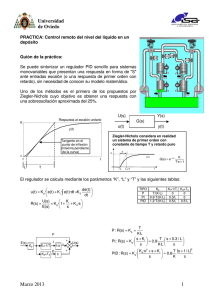
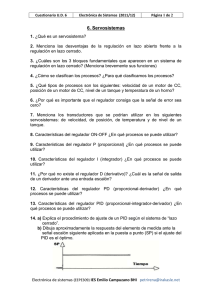
Comparación entre diferentes procedimientos de ajuste de controladores PID. II. Márgenes de ganancia y de fase y comportamiento como regulador Eduard Barberà, IQS School of Engineering, Universitat Ramon Llull Via Augusta 390, 08017-Barcelona, Spain Comparison between different tuning methods of PID controllers. II. Gain and phase margins and behavior as regulator Comparació entre diferents procediments d’ajust de controladors PID. II. Marges de guany i fase i comportament com a regulador Recibido: 30 de abril de 2013; revisado: 17 de octubre de 2013; aceptado: 22 de octubre de 2013 RESUMEN RESUM La doble normalización (ganancia y tiempo) de los procesos de primer orden con tiempo muerto (First Order Plus Dead Time, FOPDT) permite el análisis sistemático de la respuesta dinámica de los sistemas controlados, por lo que se presenta un ejercicio de comparación entre diferentes métodos de ajuste de controladores. En este artículo la comparación se basa en el análisis de los márgenes de ganancia y de fase y en su comportamiento como regulador. La doble normalització (guany i temps) dels processos de primer ordre amb temps morts (First Order Plus Time Delay, FOPDT) permet l’anàlisi sistemàtica de la resposta dinàmica dels sistemes de control, així que es presenta un exercici de comparació entre diferents mètodes d’ajust dels controladors. En aquest article, la comparació es basa en l’anàlisi dels marges de guany i de fase i en el seu comportament com a regulador. Palabras Clave: PI, PID, ajuste, margen de fase, margen de ganancia, regulador Paraules clau: PI, PID, ajustament, marge de guany, marge de fase, regulador SUMMARY The double normalization (gain and time) of the processes of first order with dead time (First Order Plus Dead Time, FOPDT) allows the systematic analysis of the dynamic answer of the controlled systems, this is the reason to present an exercise of comparison between different methods of controller tuning. On this article the comparison is based on the analysis of the gain and phase margins and its behavior like regulator. Key words: PI, PID, tuning rule, phase margin, gain margin, regulator 246 AFINIDAD LXX, 564, Octubre - Diciembre 2013 5,0 Chien 2 PI 0,0 0 0,5 20,0 5,0 0,0 0,0 1 20,0 Chien 2 PID 0 0,0 0,5 1 Figura 1.- Márgenes de ganancia (eje izquierdo) y de fase (eje derecho) en función del tiempo muerto normalizado para los controladores PI y PID ajustados por el método de un sobreimpulso del 20% de 1. - INTRODUCCIÓN En este trabajo, se han escogido como parámetros de comparación entre diferentes métodos de ajuste de controladores, los márgenes de ganancia y de fase que informan de la estabilidad del sistema siempre que éste sea de fase mínima. Por otra parte, un controlador correctamente diseñado para cambios de punto de consigna, es decir, para funcionar como servomecanismo, no tiene por qué dar buenos resultados frente a las perturbaciones que pueda sufrir el proceso, es decir, comportándose como regulador. En consecuencia, se pretende contrastar los resultados como reguladores de los procedimientos de ajuste tratados. Se ha elegido trabajar con un modelo de primer orden con tiempo muerto (FOPDT) porque además de ser un proceso muy común, constituye una aproximación suficientemente correcta para finalidades de control en un elevado número de casos. 2. – COMPARACIÓN ENTRE LOS DIFERENTES MÉTODOS DE AJUSTE: MÁRGENES DE GANANCIA Y DE FASE En sistemas de fase mínima, aquéllos que no tienen ni ceros ni polos de lazo abierto con parte real positiva, los valores de los márgenes de ganancia y de fase se consideran una medida de la estabilidad y de la bondad del diseño del sistema. Se han evaluado ambos márgenes para los sistemas de control resultantes de la optimización del CEAIT, se comprueba que los sistemas optimizados tienen márgenes de fase próximos a 60º - 70º y márgenes de ganancia entre 6 y 10 dB. Los valores de los procesos optimizados se han comparado con los obtenidos con algunos de los procedimientos habituales de ajuste de controladores (1 - 7), pero únicamente se presentan los resultados obtenidos con el segundo procedimiento de Chien (2) y con el del autor (6, 7), puesto que el resto de procedimientos conducen a resultados que se separan mucho de los valores correspondientes a los sistemas con controladores PI o PID optimizados según el criterio CEAIT (6, 7). - Chien et al. Sobreimpulso del 20% 30,0 120,0 30,0 GM dB optim. PM deg optim. 25,0 20,0 GM dB optim. PM deg optim. 100,0 25,0 80,0 20,0 15,0 60,0 15,0 10,0 Chien 2 PI 0,0 0 0,5 20,0 5,0 0,0 0,0 1 0 GM dB optim. PM deg optim. Barberà PID 100,0 25,0 120,0 100,0 80,0 20,0 60,0 15,0 60,0 10,0 40,0 10,0 40,0 5,0 20,0 5,0 20,0 0,0 0,0 0,0 0 0,5 1 80,0 0,0 0 0,5 1 Márgenes de ganancia (eje de fase Figura 2.- Figura Márgenes2.de ganancia (eje izquierdo) y de fase (ejeizquierdo) derecho) en yfunción del tiempo muerto (ejenormalizado derecho)para en los función del tiempo muerto normalizado para controladores PI y PID ajustados por el método del autor los controladores PI y PID ajustados por el método del autor Se comprueba que efectivamente, los dos procedimientos escogidos proporcionan Sedecomprueba loscercanos dos procedimientos valores los márgenesque de efectivamente, fase y de ganancia a los correspondientes a escogidos proporcionan valores de los márgenes de fase los sistemas optimizados, aunque el procedimiento esaellos quesisalcanza una y de ganancia cercanos a segundo los correspondientes optimizados, segundoPID procedimiento es muerto mejor temas aproximación, excepto aunque para el el controlador cuando el tiempo el que alcanza una mejor aproximación, excepto para el normalizado se aproxima la unidad. controlador PID acuando el tiempo muerto normalizado se aproxima a la unidad. 3. – COMPARACIÓN ENTRE LOS DIFERENTES 3. – Comparación entre los diferentes métodos de ajuste: comportamiento MÉTODOS DE AJUSTE: COMPORTAMIENTO como COMO reguladorREGULADOR Dado un controlador optimizado como servomecanisDado que unque controlador optimizado como servomecanismo no tiene por qué estar mo no tiene por qué estar optimizado al mismo tiempo optimizado mismo tiempo regulador, parece oportuno estudiar el comoalregulador, parececomo oportuno estudiar el comporta- miento como regulador de los controladores ajustados como regulador de los controladores ajustados con los con los procedimientos tratados. procedimientos tratados. Para poder realizar una comparación ajustada primero se ha procedido a evaluar los parámetros de los controPara poder realizar una comparación ajustada primero se ha procedido a evaluar los ladores PI y PID que optimizan el comportamiento como regulador el valor del criterio comportamiento CEAIT parámetros de losy controladores PI y PIDde que optimizan el comportamiento como alcanzado, utilizando éste último dato como término de regulador y el valor del criterio de comportamiento CEAIT alcanzado, utilizando éste comparación. comportamiento último dato como término de comparación. - Ziegler – Nichols - Ziegler – Nichols 3,0 3,0 2,5 2,5 2,0 2,0 1,5 1,5 80,0 0,0 0,0 120,0 30,0 15,0 0,5 1 GM dB optim. PM deg optim. Barberà PI 20,0 1,0 20,0 0,5 30,0 25,0 100,0 40,0 Chien 2 PID - Barberà 120,0 60,0 40,0 10,0 5,0 Chien et al. - Barberà Z_N PID R-optim. 1,0 Z_N PI R-optim. 0,5 0,0 0 0,5 1 0 0,5 1 Figura 3.- Valores CEAITdelentiempo función del tiempo muerto Figura 3.- Valores de CEAITde en función muerto normalizado, obtenidos con los normalizado, obtenidos con los controladores PI y PID controladores PI y PID ajustados por el método de Ziegler y Nichols comparados con los valores ajustados por el método de Ziegler y Nichols comparaoptimizados como regulador. dos con los valores optimizados como regulador. Únicamente para valores muy pequeños de tiempo muerto el comportamiento como Figurade1.Márgenes de ganancia (ejederecho) izquierdo) y dedel tiempo muertoÚnicamente Figura 1.- Márgenes ganancia (eje izquierdo) y de fase (eje en función para valores muy pequeños de tiempo muer- regulador muy aceptable, al aumentar éste el valor del criterio de error se hace fase (eje derecho) en función del tiempo muerto normalto elescomportamiento como regulador es muy aceptable, normalizado para los controladores PI y PID ajustados por el método de un sobreimpulso del 20% de izado para los controladores PI y PID ajustados por el al aumentar éste el valor del criterio de error se hace exextraordinariamente grande, este efecto es mayor en el controlador PI que en el PID. Chien et al. método de un sobreimpulso del 20% de Chien et al. traordinariamente grande, este efecto es mayor en el con- Chien et al. PI que en el PID. trolador - Barberà 30,0 25,0 GM dB optim. PM deg optim. Barberà PI 120,0 30,0 100,0 25,0 GM dB optim. PM deg optim. Barberà PID 120,0 80,0 20,0 15,0 60,0 15,0 60,0 10,0 40,0 10,0 40,0 5,0 20,0 5,0 20,0 0,0 0,0 0,0 0,0 20,0 AFINIDAD LXX, 564, Octubre - Diciembre 2013 0 0,5 1 0 0,5 1 Sin máximo sobreimpulso 100,0 80,0 247 Figura 6.- Valores de CEAIT en función del tiempo muerto normalizado, obtenidos con los controladores PI y PID ajustados por el método de Cohen y Coon comparados con los valores optimizados como regulador. Un controlador PI ajustado por este método se acerca a los resultados óptimos, aunque en el caso del controlador PID los resultados no son tan satisfactorios. - Lopez- et al. et al. Lopez - Chien et al. Sin máximo sobreimpulso 3,0 3,0 3,0 3,0 3,0 2,5 2,5 2,5 2,5 2,0 2,0 2,5 Chien1 Chien1PID PID R-optim. R-optim. 3,0 Lopez PI R-optim. 2,0 2,0 2,0 2,0 1,5 1,5 1,5 1,5 1,5 1,5 1,0 1,0 1,0 1,0 1,0 1,0 0,5 0,5 0,5 0,5 0,0 Chien1 Chien1 PI PI R-optim. R-optim. 0,5 0,5 0,0 0,0 00 0,5 0,5 11 0,0 0,0 0,5 0,5 11 R-optim. 0,0 0 00 Lopez PID 2,5 0,5 1 0 0,5 1 Figura 7.- Valores de CEAIT obtenidos en función del Figura 7.- Valores de CEAIT obtenidos en función del tiempo muerto normalizado, con los tiempo muerto normalizado, con los controladores PI y Figura 4.- Valores defunción CEAIT en función del tiempo muerto con los Figura Figura 4.4.- Valores Valores de de CEAIT CEAIT en en función del del tiempo tiempo muerto muerto normalizado, normalizado,obtenidos obtenidos con los controladores PI y PID ajustados por el método de Lopez et al. comparados con los valores normalizado, obtenidos con los controladores PI y PID controladores PI por de et sobreimpulso comparados controladores PI yy PID PID ajustados ajustados por el el método método de Chien Chienet et al. al. sin sin comparadoscon conlos los ajustados por el método de Chien al. sinsobreimpulso sobreimpulso PID ajustados por el método de Lopez et al. comparaoptimizados como regulador. dos con los valores optimizados como regulador. optimizados como comparados convalores los valores optimizados como regulador. valores optimizados como regulador. regulador. Sobreimpulso Sobreimpulso del del 20% 20% 3,0 3,0 3,0 3,0 2,5 2,5 2,5 2,5 2,0 2,0 2,0 2,0 1,5 1,5 1,5 1,5 1,0 1,0 0,0 0,0 0 0 0,5 0,5 Chien2 Chien2PID PID R-optim. R-optim. 1,0 1,0 Chien2 PI Chien2 PI R-optim. R-optim. 0,5 0,5 Se puede comprobar fácilmente que el comportamiento de los controladores PI y PID ajustados mediante este procedimiento se ajusta bien al óptimo para entradas PID ajustados mediante este muy procedimiento se ajusta muy bien al de óptimo para aunque a partir de un tiempo muerto normase aparta,perturbación, llegando a valores excesivamente grandes para valores cercanos a la entradas de perturbación, aunque llegando a partir de un tiempo excesivamente muerto normalizado de 0.5 lizado de 0.5a se aparta, valores se aparta, llegando valores excesivamentea grandes para valores cercanos a la unidad. grandes para valores cercanos a la unidad. Se puede comprobar fácilmente que el comportamiento de los controladores PI y Sobreimpulso del 20% unidad. - Padma Sree et al. - Padma Sree et al. - Padma Sree et al. 3,0 0,5 0,5 1 1 0,0 0,0 2,5 0 0 0,5 0,5 2,0 1 1 1,5 Figura 5.- Valores de CEAIT en función delen tiempo muertodel normalizado, con los Figura 5.- Valores CEAIT función tiempo obtenidos muerto Figura 5.- Valores de CEAIT de en función del tiempo muerto normalizado, obtenidos con los 1,0 normalizado, obtenidos conel los controladores PI ysobreimpulso PID ajustacontroladores PI y PID ajustados por método de Chien et al. con del 20% controladores PI y PID ajustados por el método de Chien et al. con sobreimpulso del 20% 0,5 dos por el método de Chien et al. con sobreimpulso del 20% comparados con los valores optimizados como regulador. comparados convalores los valores optimizados como regulador. comparados con los optimizados como regulador. 0,0 Padma PID Padma PID R-optim. R-optim. 3,0 2,5 2,0 1,5 1,0 0,5 0,0 0 0 0,5 0,5 1 1 Se comprueba un funcionamiento peor funcionamiento como regulador Figura 8.- Valores de CEAIT en función del tiempo Se comprueba un peor como regulador respecto deFigura los8.- Valores de CEAIT en función del tiempo muerto normalizado, obtenidos con los Se comprueba un los peorcontroladores funcionamientoajustados como regulador respecto de los Figura 8.Valoresnormalizado, de CEAIT en función del tiempocon muerto obtenidos con los muerto obtenidos losnormalizado, controladores respecto de por el procedicontroladores PID ajustados por el método de Padma Sree et al. comparados con los valores controladores ajustados por y el Nichols procedimiento de Zieglerbajos y Nichols para valores bajos PID ajustados por el método de Padma Sree et al. commiento de Ziegler para valores de tiempo controladores PID ajustados por el método de Padma Sree et al. comparados con los valores controladores ajustados por el procedimiento de Ziegler y Nichols para valores bajos normalizado aunque de forma global el comportamiento parados con los valores optimizados optimizados como regulador.como regulador. optimizados como regulador. de tiempo normalizado aunque de forma global el comportamiento sea más de tiempo normalizado aunque de forma global el comportamiento sea más sea más aceptable. - Barberà - Barberà aceptable. - Barberà aceptable. 3,0 3,0 - Cohen - Coon - Cohen - Coon Barberà PI PI - Cohen - Coon Barberà 2,5 2,5 3,0 3,0 R-optim. R-optim. Cohen-Coon Cohen-Coon PI 2,5 2,0 2,0 PID 2,5 R-optim. 2,0 2,0 1,5 R-optim. 3,03,0 2,52,5 2,02,0 1,5 1,5 1,51,5 1,5 1,0 1,0 1,01,0 1,0 1,0 0,5 0,5 0,50,5 0,5 0,5 0,0 0,0 0,0 0,0 0 0 0 0,5 0 1 0,5 0,5 0,5 0,00,0 1 1 0 0 Barberà PIDPID Barberà R-optim. R-optim. 0,50,5 11 1 9.-CEAIT Valores de CEAIT en muerto función del tiempo Figura 9.-Figura Valores de en función tiempo normalizado, obtenidos conlos los Figura 9.- Valores de CEAIT en función del del tiempo muerto normalizado, obtenidos con muerto normalizado, obtenidos con los controladores Figura 6.- Valores de CEAIT en función del tiempo PI y PID ajustados por el método del autor comparamuerto normalizado, obtenidos con los controladores PI controladores PI y PID ajustados por el método de Cohen y Coon comparados con los valores como regulador. como regulador. dos con los valores optimizados y PID ajustados por el método de Cohen y Coon comcomo regulador. optimizados como regulador. parados con los valores optimizados como regulador. Aunque procedimiento el que conduce a los mejoresresultados resultadosdedeCEAIT CEAIT Aunque esteeste procedimiento es es el que conduce a los mejores Figura 6.- Valores de CEAIT en función del tiempo muerto normalizado, obtenidos con los controladores y PID ajustados el método autor comparados con valores optimizados controladores PI y PI PID ajustados por por el método deldel autor comparados con loslos valores optimizados Aunque este procedimiento es el que conduce a los meUn controlador PI ajustado por este método se acerca a los resultados óptimos, el controlador como servomecanismo (cambios punto de de resultados deutiliza CEAIT cuando el controlador se utiliza Un controlador PI ajustado por este método se acerca cuando a cuando eljores controlador se se utiliza como servomecanismo (cambios dedepunto aunquelos en resultados el caso del controlador PID los resultados no son tan satisfactorios. como servomecanismo (cambios de punto de consigna), óptimos, aunque en el caso del controlador consigna), su comportamiento, aunque razonable, no se acerca al óptimo al hacer consigna),su su comportamiento, comportamiento, aunque razonable, no seno acerca al óptimo aunque razonable, se acerca al al hacer PID los resultados no son tan satisfactorios. - Lopez et al. 3,0 2,5 3,0 Lopez PI R-optim. 2,0 1,5 1,5 1,0 1,0 0,5 0,5 0,0 2480 Lopez PID 2,5 2,0 óptimo al hacer frente a las perturbaciones. Únicamente en el caso del controlador PI y para valores altos de tiempo muerto se aproxima al comportamiento óptimo. R-optim. 0,0 0,5 1 0 0,5 1 Figura 7.- Valores de CEAIT obtenidos en función del tiempo muerto normalizado, con los AFINIDAD LXX, 564, Octubre - Diciembre 2013 4. – CONCLUSIONES Con el método de doble normalización se puede explorar de forma muy exhaustiva las cualidades de cualquier procedimiento de ajuste de controladores para procesos de tipo 0, más concretamente, este trabajo se ha limitado a procesos de primer orden con tiempo muerto. Se han comparado diversos procedimientos, analizando los valores obtenidos de márgenes de ganancia y de fase. Se puede concluir que el procedimiento del autor es el que proporciona los mejores resultados aproximándose a los valores de los márgenes correspondientes a los controladores optimizados para cambios de punto de consigna. Se comprueba que, en general, un controlador optimizado para cambios de punto de consigna no responde de forma óptima frente a entradas de perturbación. No obstante, existen procedimientos de ajuste que se aproximan más en ciertas regiones de los valores de tiempo muerto. Especialmente, los controladores ajustados por el procedimiento de Lopez et al. se aproximan mucho al comportamiento óptimo para valores de tiempo muerto normalizado menores de 0.5. REFERENCIAS 1. 2. 3. 4. 5. 6. 7. J.G. Ziegler; N.B. Nichols, Optimum settlings for automatic controllers, ASME Transactions, 64, 759-768 (1942) K.L. Chien; J.A. Hrones; J.B. Reswick, On the automatic control of generalized passive systems, ASME Transactions, 74, 175-185 (1952) G.H. Cohen; G.A Coon, Theoretical considerations of retarded control, ASME Transactions, 75, 827-834 (1953) A.M. Lopez; J.A. Miller; C.L. Smith; P.W. Murrill, Tuning controllers with error-integral criteria, Instrumentation Technology, 57-62 (1967) R. Padma Sree; M.N. Srinivas; M. Chidambaram, A simple method of tuning PID controllers for stable and unstable FOPTD systems, Computers and Chemical Engineering, 28, 2201-2218 (2004) E. Barberà, First order plus dead-time (FOPDT) processes: A new procedure for tuning PI and PID controllers, 10 Mediterranean Congress of Chemical Engineering, Barcelona, november 15-18 (2005) E. Barberà, Procesos de primer orden con tiempo muerto (FOPDT): Un nuevo procedimiento para el ajuste de controladores PI y PID, Laboratorios y proveedores, (150), 53, marzo-abril (2006) AFINIDAD LXX, 564, Octubre - Diciembre 2013 249