Parte 3 - Curso de Máquinas
Anuncio

Modelación y Control de Máquinas
Eléctricas
Parte III
Dr. José Manuel Aller Castro
Escuela Superior Politécnica de Chimborazo
Riobamba, Mayo 2015
Control Directo de Par y Flujo I
I
I
I
Durante la década de los ochenta, Takahashi introduce una
técnica avanzada de control escalar denominada control
directo de par y flujo (DTC) o direct self-control (DSC),
la cual suministra la consigna de disparo para las
componentes de un inversor en tensión.
Esta técnica permite obtener una característica dinámica
del accionamiento comparable con la de otros
accionamientos por control vectorial.
Recientemente, este esquema de control ha sido
introducido comercialmente en diferentes convertidores de
distintas industrias despertando un alto interés a nivel
industrial.
Control Directo de Par y Flujo II
I
Este esquema, como su nombre lo indica, se basa en el
control del par eléctrico de la máquina y del flujo en el
estator, a través de la selección del vector espacial de
tensión más apropiado de una tabla, para seguir la
referencia de estas señales. La información de disparo de
las componentes del inversor para cada vector espacial de
tensión está contenida en la tabla de control.
I
Expresión vectorial de par eléctrico y del enlace de flujo en
el estator
Control Directo de Par y Flujo III
I
La expresión del par eléctrico puede ser representada de
forma más sencilla, a través del producto vectorial de la
corriente del rotor y del estator como:
→
− →
−
Te = Ler iqe idr − ide iqr = Ler ire × ie
(1)
Control Directo de Par y Flujo IV
I
El enlace de flujo del estator se puede obtener, a partir de
la integración directa de la fuerza electromotriz en los
devanados del estator.
ˆ ~λe =
~ve − Re~ie dt = Le~ie + Ler~ire
(2)
donde:
→
−
xe =
q h
i
t
xae (t) xbe (t) xce (t)
e
∀x ∈ {v , i, λ }
(3)
h
i
√
t
2π
4π
→
−
2 −j π6
xabe (t) xbce (t) xcae (t)
xe = 3 e
1 ej 3 ej 3
∀x ∈ {v }
(4)
2
3
1 e
j 2π
3
j 4π
3
Control Directo de Par y Flujo V
I
Para calcular el enlace de flujo del estator a partir de la
integral de la expresión (2) es necesario realizar la
medición directa de la tensión y corriente en los terminales
del estator.
I
Despejando el vector especial de la corriente del rotor de la
expresión (2) y sustituyendo el resultado en la expresión
(1), se obtiene el par eléctrico de la máquina de inducción
en función del vector espacial del flujo y la corriente del
estator.
−
→ →
−
Te = λe × ie
(5)
Control Directo de Par y Flujo VI
I
I
I
El único parámetro del modelo de la máquina de inducción
involucrado en la estimación del par eléctrico instantáneo y
del enlace de flujo del estator, es la resistencia del estator
(Re ).
El error introducido en la estimación por la variación de
este parámetro con la temperatura es despreciable y puede
ser reducido utilizando métodos de estimación paramétrica
en tiempo real.
El puente inversor trifásico genera ocho diferentes salidas
de tensión, dependiendo la tensión en la barra de corriente
continua y la conectividad de los seis interruptores
estáticos que conforman.
Control Directo de Par y Flujo VII
I
Utilizando la expresión (4) para cada una de estas posibles
salidas, se puede encontrar el vector espacial de tensión
aplicado sobre los terminales del convertidor
electromecánico.
q h
i
2π
4π
→
−
(6)
ve = 23 1 ej 3 ej 3 Sw VDC
I
Donde, Sw es un vector que representa el estado de los
interruptores del puente de dimensión 3x1.
En este vector, el elemento "1" corresponde al encendido
del interruptor superior, mientras que "0" indica el
encendido del interruptor inferior de la misma rama.
Seis de los vectores espaciales de tensión poseen magnitud
uniforme y se encuentran desfasados entre ellos. Los otros
dos estados están asociados al vector espacial nulo.
I
I
Estrategia de control directo de par I
I
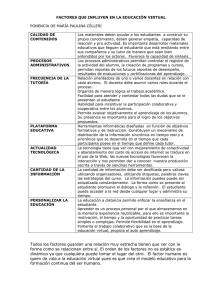
En la figura, se presenta el diagrama en bloques del
controlador directo de par.
Figura: Diagrama en bloques del controlador directo de par.
Estrategia de control directo de par II
I
I
I
La magnitud del enlace de flujo y el par eléctrico de
referencia son comparados con los estimados de la
máquina de inducción, que se calculan a partir, de la
corriente del estator, el vector de interrupciones del
inversor y la tensión de la barra de continua.
Los errores de par y flujo son procesados en dos
comparadores de histéresis de tres y dos niveles
respectivamente, a partir de estos resultados y de la
posición angular del enlace de flujo del estator se
determina el vector de interrupciones del inversor.
El algoritmo del controlador directo de par se fundamenta
en escoger el vector espacial de tensión que maximice el
cambio necesario en el enlace de flujo del estator, para
ajustar el par eléctrico a partir de la expresión 5.
Estrategia de control directo de par III
I
El controlador por histéresis del enlace de flujo posee dos
salidas digitales de acuerdo al valor del error en la
magnitud del enlace de referencia y el estimado y de la
→ ) utilizada, de acuerdo a las
banda de histéresis (HB(−
λe )
siguientes expresiones:
→ = 1 ∀
S−
λe
→
S −
λe
=0 ∀
→
→ > HB−
error−
λe
λe →
→ < −HB −
error−
λe
λe → corresponde al ancho de banda de
donde: 2HB−
λe
histéresis del controlador.
(7)
Estrategia de control directo de par IV
I
Este controlador al mantener la magnitud del enlace de
flujo del estator limitada a una banda de histéresis origina
una trayectoria circular del vector espacial del enlace de
flujo del estator.
I
Sustituyendo la expresión (6) en la (2), se obtiene el vector
espacial del enlace de flujo del estator en función de la
salida del puente inversor.
r h
ˆ
i
−
→
−
→
→
−
2
2π
4π
j
j
λe =
1 e 3 e 3 Sw VDC ·t −Re · ie dt + λe 3
t=0
(8)
Estrategia de control directo de par V
I
Considerando que las caídas de tensión en los devanados
del estator son pequeñas, las variaciones en la dirección
−
→
del enlace de flujo del estator λe , son ocasionadas por la
dirección del vector espacial de tensión aplicado al
convertidor.
I
Es decir, una escogencia adecuada del vector espacial de
tensión aplicado a la máquina de inducción, determina un
control sobre la magnitud y trayectoria del enlace de flujo
del estator.
Estrategia de control directo de par VI
I
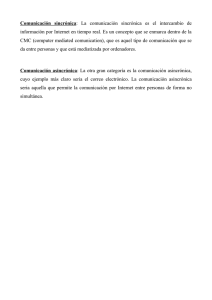
En la figura se puede observar la trayectoria del vector
espacial del enlace de flujo del estator y la variación en el
enlace de flujo del estator correspondiente a cada uno de
los vectores espaciales de tensión del inversor para un
instante de tiempo ∆t.
Estrategia de control directo de par VII
(a)
(b)
Figura: (a) Trayectoria del vector especial del enlace de flujo del
estator, (b) variación del enlace de flujo en función del vector
espacial de tensión del inversor.
Estrategia de control directo de par VIII
I
El controlador por histéresis del par eléctrico posee tres
salidas digitales de acuerdo al valor del error en la
magnitud del par de referencia y el estimado y de la banda
de histéresis (HB(Te ) ) utilizada, de acuerdo a las siguientes
expresiones:
S (Te ) = 1 ∀
errorTe > HB(Te )
S(Te ) = −1 ∀
errorTe < HB(Te )
S(Te ) = 0 ∀ −HB(Te ) < errorTe < HB(Te )
I
(9)
La estrategia del controlador directo de par, se fundamenta
en ajustar el par eléctrico al de referencia, mediante el
control de la magnitud y sentido de rotación del vector
espacial del enlace de flujo del estator.
Estrategia de control directo de par IX
I
I
I
Esta posibilidad de ajuste, define seis zonas de operación
dependiendo de la posición del vector espacial del enlace
de flujo del estator. Estas zonas de control coinciden con la
localización de los vectores espaciales de tensión del
inversor.
Cada uno de estas seis zonas de control tiene un ancho de
π/3 radianes y vienen dados por la expresión (10).
En la figura anterior en la parte (a) se puede observar las
seis zonas de operación .
(2N − 3) ·
π
π
≤ Z(n) ≤ (2N − 1) ·
6
6
(10)
Estrategia de control directo de par X
I
En cada zona de operación, una escogencia adecuada del
vector espacial de tensión permite incrementar o
decrementar la magnitud del enlace de flujo del estator y
alterar su sentido de rotación.
I
Manteniendo las magnitudes de corriente y el enlace de
flujo constante, se puede controlar el par eléctrico
resultante, modificando el ángulo relativo entre el enlace
de flujo y la corriente del estator.
Estrategia de control directo de par XI
I
I
I
Este ángulo relativo se puede variar controlando el sentido
de rotación del vector espacial del enlace de flujo en el
estator.
Por ejemplo, si el vector espacial del enlace de flujo se
encuentra en la primera zona de operación Z(1) , y se desea
aumentar la magnitud del enlace, se debe aplicar sobre los
→
−
terminales de la máquina el vector espacial de tensión v2 si
el par de referencia es menor que la referencia o el vector
→
−
espacial v6 si el par eléctrico es mayor que la referencia.
En la tabla 1 se presenta la secuencia de disparo del
inversor para la estrategia de control directo de par, a partir
de la posición del enlace de flujo del estator, y la salida de
los comparadores de histéresis del flujo y par eléctrico.
Estrategia de control directo de par XII
I
Con la finalidad de incrementar la velocidad de cambio del
par eléctrico y magnitud del enlace de flujo, no se utiliza el
vector espacial de tensión que se encuentra dentro de la
zona de localización del enlace de flujo, así como tampoco
el localizado en la zona opuesta.
Estrategia de control directo de par XIII
Cuadro: Secuencia de disparo del inversor para el controlador
directo de par.
→
S(−
λ )
S(Te )
1
1
1
0
0
0
1
0
−1
1
0
−1
e
Z(1)
→
−
v1
→
−
v7
→
−
v5
→
−
v2
→
−
v0
→
−
v6
Z(2)
→
−
v5
→
−
v0
→
−
v4
→
−
v3
→
−
v7
→
−
v2
Z(3)
→
−
v4
→
−
v7
→
−
v6
→
−
v1
→
−
v0
→
−
v3
Z(4)
→
−
v6
→
−
v0
→
−
v2
→
−
v5
→
−
v7
→
−
v1
Z(5)
→
−
v2
→
−
v7
→
−
v3
→
−
v4
→
−
v0
→
−
v5
Z(6)
→
−
v3
→
−
v0
→
−
v1
→
−
v6
→
−
v7
→
−
v4
Estrategia de control directo de par XIV
I
I
I
Este procedimiento es el utilizado por el control directo de
par, para el ajuste del enlace de flujo del estator y del par
eléctrico a los valores de referencia.
Las respuestas dinámicas de los accionamientos de la
máquina de inducción que utilizan control directo de par,
son comparables a los obtenidos con otros esquemas de
control vectorial.
La estimación del enlace de flujo de estator y del par
eléctrico instantáneo sólo depende de la resistencia del
estator (Re ), a diferencia de otros controladores vectoriales
como el de campo orientado en los que los estimadores,
dependen de un conjunto mayor de parámetros del modelo
de la máquina de inducción.
Estrategia de control directo de par XV
I
Entre estos parámetros encontramos: las inductancias del
estator, rotor y mutua del estator-rotor, la constante de
tiempo del rotor, estos parámetros son fuertemente
afectados durante la operación del convertidor
electromecánico, por las variaciones del grado de
saturación magnética y la temperatura.
I
El efecto por variaciones de la temperatura sobre la
resistencia del estator es despreciable y puede ser
corregida en línea con métodos de estimación paramétrica.
Estrategia de control directo de par XVI
I
Entre las características del control directo de par tenemos:
I
I
I
I
No utiliza realimentación en corriente.
No utiliza el esquema tradicional de control por ancho de
pulso.
Los controladores por histéresis del enlace de flujo del
estator y del par eléctrico generan un rizado sobre estas
variables.
La frecuencia de conmutación del puente inversor no es
constante y depende de la banda de histéresis de los
controladores de par eléctrico y del enlace de flujo.
Estrategia de control directo de par XVII
I
En la figura se presenta la respuesta del esquema DTC al
seguir una consigna de velocidad, para una máquina de
inducción de 200 HP alimentada con un puente inversor,
desde un sistema trifásico de 460 V a frecuencia industrial
de 60 Hz.
I
La conversión AC - DC se realiza con un rectificador no
controlado trifásico.
Estrategia de control directo de par XVIII
Figura: Velocidad mecánica, par y tensión de la barra de
continua para el accionamiento de DTC
Estrategia de control directo de par XIX
(a)
Estrategia de control directo de par XX
(b) Detalle
Figura: Tensión y corriente en la fase “a” del motor de inducción
para el accionamiento de DTC
Estrategia de control directo de par XXI
(a)
Estrategia de control directo de par XXII
(b) Detalle
Figura: Tensión y corriente en la fase “a” de la fuente alterna
para el accionamiento de DT C
Introducción al control de la MS I
I
I
I
I
I
Las máquinas de corriente continua y de inducción tienen
un amplio rango de aplicaciones industriales tales como
tracción, bombeo, control y otros.
Sin embargo, la operación del sistema eléctrico de potencia
requiere la conversión de grandes cantidades de energía
primaria, en energía y potencia eléctrica.
La energía eléctrica puede ser transportada y convertida en
otras formas de energía en forma limpia y económica.
La máquina sincrónica es hoy por hoy, el convertidor
utilizado más ampliamente para realizar esta tarea.
Dependiendo del sistema mecánico de accionamiento, las
máquinas sincrónicas pueden construirse de rotor liso
cuando deban operar en altas velocidades, o con rotor de
polos salientes cuando son accionadas a menor velocidad.
Introducción al control de la MS II
I
I
Aun cuando un gran porcentaje de máquinas sincrónicas
son utilizadas como generadores en las plantas de
producción de energía eléctrica, debido a su alto
rendimiento que es posible alcanzar con estos
convertidores y a la posibilidad de controlar la tensión, en
numerosas ocasiones se emplea industrialmente como
elemento motriz.
Como otros convertidores electromecánicos, la máquina
sincrónica es completamente reversible y se incrementa día
a día el número de aplicaciones donde puede ser utilizada
con grandes ventajas, especialmente cuando se controla
mediante fuentes electrónicas de frecuencia y tensión
variable.
Introducción al control de la MS III
I
I
El principal inconveniente para su uso como motor es que
no desarrolla par de arranque, pero si se incluye en el rotor
de la máquina un devanado auxiliar de jaula de ardilla, es
posible obtener par de aceleración como motor de
inducción hasta una velocidad cercana a la de sincronismo,
y excitar en el momento apropiado la bobina del campo,
con la finalidad de sincronizar la máquina a la red
mediante los pares transitorios adicionales que se obtienen
durante este proceso.
Si la fuente de alimentación puede reducir la frecuencia
angular de las tensiones o corrientes de armadura a valores
muy bajos, la máquina es capaz de sincronizarse a esa red
y posteriormente ser acelerada al mismo tiempo que se
incrementa paulatinamente la frecuencia de la fuente.
Introducción al control de la MS IV
I
Como la construcción de fuentes de gran potencia
controladas en frecuencia es hoy día factible mediante
puentes inversores con interruptores estáticos, es posible
que en el futuro esta máquina incremente notablemente su
importancia como accionamiento industrial, e incluso
desplace a las máquinas de corriente continua.
Descripción de la Máquina Sincrónica
I
I
I
I
La máquina sincrónica es un convertidor electromecánico
de energía con una pieza giratoria denominada rotor o
campo, cuya bobina se excita mediante la inyección de una
corriente continua, y una pieza fija denominada estator o
armadura por cuyas bobinas circula corriente alterna.
Las corrientes alternas que circulan por los enrollados del
estator producen un campo magnético rotatorio que gira en
el entre hierro de la máquina con la frecuencia angular de
las corrientes de armadura.
El rotor debe girar a la misma velocidad del campo
magnético rotatorio producido en el estator para que el par
eléctrico medio pueda ser diferente de cero.
El rotor gira mecánicamente a la misma frecuencia del
campo magnético rotatorio del estator durante la operación
en régimen permanente.
La Máquina Sincrónica
Figura: Partes de las máquinas sincrónicas
La Máquina Sincrónica
I
I
I
Durante la operación de la máquina sincrónica en régimen
permanente, la velocidad mecánica del rotor es igual a la
velocidad angular del campo magnético rotatorio
producido por el estator. En estas condiciones, sobre los
conductores o bobinas del campo no se induce fuerza
electromotriz.
Para producir fuerza magnetomotriz en el rotor es
necesario inyectar corriente en esta bobina mediante una
fuente externa. De esta forma se obtienen dos campo
magnéticos rotatorios que giran a la misma velocidad, uno
producido por el estator y otro por el rotor.
Los campos interactúan produciendo par eléctrico medio y
se realiza el proceso de conversión electromecánica de
energía.
La Máquina Sincrónica
I
La condición necesaria, pero no suficiente, para que el par
medio de la máquina sea diferente de cero es:
ωe = p · ωm
donde:
p es el número de pares de polos de la máquina
sincrónica.
La Máquina Sincrónica
I
I
La bobina del rotor o campo de la máquina sincrónica se
alimenta mediante la inyección de corriente continua,
como se mencionó anteriormente, con la finalidad de
producir un campo magnético de magnitud constante,
semejante al de un imán permanente, pero de una
intensidad mucho mayor.
Debido a que el rotor de la máquina gira en régimen
permanente a la velocidad sincrónica, el campo magnético
constante producido en este sistema se comporta, desde el
punto de vista del estator, como un campo magnético
rotatorio.
La Máquina Sincrónica
Figura: Esquema básico de una máquina sincrónica trifásica de polos
salientes
La Máquina Sincrónica
I
Para evaluar la magnitud del par en una máquina
sincrónica se puede utilizar la expresión:
Te = k · Fr Fe sin δ
donde:
k es una constante de proporcionalidad que depende
de la geometría de la máquina y de la disposición
física de las bobinas.
Fe es la amplitud de la distribución sinusoidal de la
fuerza magnetomotriz del estator.
Fr es la amplitud de la distribución sinusoidal de la
fuerza magnetomotriz del rotor.
δ es el ángulo entre las amplitudes de las dos fuerzas
magnetomotrices, conocido generalmente como
ángulo de carga.
Modelo de la Máquina Sincrónica I
I
Analizando el comportamiento de los ejes eléctricos de la
máquina sincrónica en el sistema de coordenadas
correspondiente a las bobinas reales o físicas, se satisface
el siguiente sistema de ecuaciones:
d vabc,f = Rabc,f iabc,f +
λabc,f
dt
I
En los sistemas lineales, la relación entre las corrientes que
circulan por las bobinas y los enlaces de flujo que las
enlazan vienen dados por la relación:
λabc,f (θ , i) = Labc,f (θ ) iabc,f
Modelo de la Máquina Sincrónica II
I
Analizando el comportamiento de los ejes eléctricos de la
máquina sincrónica en el sistema de coordenadas
correspondiente a las bobinas reales o físicas, se satisface
el siguiente sistema de ecuaciones:
d vabc,f = Rabc,f iabc,f +
λabc,f
dt
I
(11)
En los sistemas lineales, la relación entre las corrientes que
circulan por las bobinas y los enlaces de flujo que las
enlazan vienen dados por la relación:
λabc,f (θ , i) = Labc,f (θ ) iabc,f
(12)
Modelo de la Máquina Sincrónica III
I
Sustituyendo esta relación en la expresión 11 se obtiene el
resultado siguiente:
d dθ d vabc,f
= Rabc,f iabc,f + Labc,f
iabc,f +
Labc,f iabc,f =
dt
dt dt
= Rabc,f iabc,f + Labc,f p iabc,f + θ̇ · τabc,f iabc,f
(13
I
I
El sistema de ecuaciones diferenciales 13 representa el
comportamiento dinámico de las bobinas de la máquina
sincrónica en coordenadas primitivas.
Este sistema se expresa en forma canónica como:
h
i o
−1 n
p iabc,f = Labc,f
vabc,f − Rabc,f + θ̇ · τabc,f
iabc,f
(14)
Modelo de la Máquina Sincrónica
IV
I
I
La matriz de inductancia Labc,f depende de la posición
relativa θ del rotor con respecto al estator, por esta razón la
matriz de transición de estado también depende de la
posición angular del rotor.
Si la velocidad de la máquina es constante, la posición
angular del rotor es:
θ = θ0 + ωm t
I
I
(15)
Los computadores personales actuales son capaces de
resolver este problema, aun cuando en el pasado estos
cálculos representaban grandes dificultades.
Durante los períodos transitorios, la velocidad angular de
la máquina cambia y la posición angular del rotor es una
nueva variable de estado que debe ser evaluada para
determinar su dependencia temporal.
Modelo de la Máquina Sincrónica V
I
En este caso es necesario incorporar una ecuación
adicional al sistema 14 para representar el comportamiento
dinámico del eje mecánico de la máquina:
t 1
iabc,f τabc,f iabc,f − Tm = J θ̈ + α θ̇
2
(16)
I
La ecuación 16 representa el balance del par eléctrico y
mecánico en el eje del rotor.
I
El par acelerante es igual al par eléctrico del convertidor,
menos el par resistente opuesto por la carga y por las
pérdidas mecánicas.
Modelo de la Máquina Sincrónica VI
I
La ecuación diferencial de segundo orden 16 puede
expresarse mediante dos ecuaciones diferenciales de
primer orden:
(
t ω̇m = J1 12 iabc,f τabc,f iabc,f − Tm − α θ̇
θ̇ = ωm
(17)
Donde:
J es el momento de inercia del rotor
Tm es el par mecánico resistente
α es el coeficiente de fricción dinámica
Modelo de la Máquina Sincrónica VII
I
La matriz de inductancias de la máquina sincrónica
esquematizada en la figura 7 posee la siguiente estructura:
[Lee (θ )] [Ler (θ )]
Labc,f (θ ) =
(18)
[Lre (θ )]
Lf
Laa (θ ) Mab (θ ) Mac (θ )
[Lee (θ )] = Mba (θ ) Lbb (θ ) Mbc (θ )
Mca (θ ) Mcb (θ ) Mcc (θ )
Maf (θ )
[Lef (θ )] = [Lfe (θ )]t = Mbf (θ )
Mcf (θ )
Donde:
e es el subíndice referido a las bobinas del estator
f es el subíndice referido a las bobinas del campo
Modelo de la Máquina Sincrónica VIII
I
a, b, c son los subíndices de las tres bobinas físicas del
estator
Estas inductancias se pueden representar aproximadamente
mediante las siguientes funciones:
Laa (θ ) = L1e + M2e cos 2θ + · · ·
2π
)+···
3
4π
Lcc (θ ) = L1e + M2e cos 2(θ −
)+···
3
π
Mab (θ ) = Mba (θ ) = −M1e − M2e cos 2(θ + ) + · · ·
6
π
Mac (θ ) = Mca (θ ) = −M1e − M2e cos 2(θ − ) + · · ·
6
π
Mbc (θ ) = Mcb (θ ) = −M1e − M2e cos 2(θ − ) + · · ·
2
Lbb (θ ) = L1e + M2e cos 2(θ −
(19)
(20)
(21)
(22)
(23)
(24)
Modelo de la Máquina Sincrónica IX
Donde:
Ld ≡
3
3
(L1e + M2e ) ; Lq ≡ (L1e − M2e )
2
2
r
3
Ldf ≡
M
2 ef
L1e =
Ld + Lq
Ld − Lq
; M2e =
3
3
M1e '
L1e
2
Modelo de la Máquina Sincrónica X
I
Las inductancias mutuas entre el estator y el rotor pueden
ser aproximadas mediante las siguientes funciones:
Maf (θ ) = Mfa (θ ) = Mef cos θ + · · ·
(25)
2π
)+···
(26)
3
4π
Mcf (θ ) = Mfc (θ ) = Mef cos(θ −
)+···
(27)
3
Si el rotor de la máquina sincrónica es liso, todas las
inductancias del estator son independientes de la posición
del
rotor. En
esta situación la matriz de inductancias
Labc,f (θ ) se expresa de la siguiente forma:
Mbf (θ ) = Mfb (θ ) = Mef cos(θ −
I
h
i
Labc,f (θ ) =
L1e
M1e
M1e
Mef cos θ
M1e
L1e
M1e
Mef cos(θ − 2π
3 )
M1e
M1e
L1e
Mef cos(θ − 4π
3 )
Mef cos θ
Mef cos(θ − 2π
3 )
Mef cos(θ − 4π
3 )
Lf
(28)
Transformación a vectores espaciales I
I
Para aplicar la transformación de vectores espaciales a las
ecuaciones 13 y 16 que representan el comportamiento de
la máquina sincrónica en coordenadas primitivas, es
conveniente expresar por separado las ecuaciones del
estator y del rotor:
[ve ] = [Re ] [ie ] + p {[Lee ] [ie ] + [Lef ] if }
(29)
vf = Rf if + p {[Lfe ] [ie ] + Lf if }
(30)
Transformación a vectores espaciales II
I
Aplicando esta transformación de vectores espaciales a la
expresión 29, se obtienen el siguiente resultado:
(
3
ve = Re ie + p (L1e + M1e ) ie + M2e ej2θ i∗e +
2
r
3
M ejθ if
2 ef
)
(31)
Donde:
r 2
va + αvb + α 2 vc
ve =
3
r
2
1 α α 2 [Re ] [ie ] = Re ie
3
r
2
1 α α 2 [Lee ] [ie ] =
3
r
2
=
1 α α2 · · · ·
3
(32)
(33)
Transformación a vectores espaciales III
L1e
· · · · −M1e
−M1e
cos 2θ
−M1e
−M1e + M2e − cos 2(θ +
L1e
− cos 2(θ −
−M1e
L1e
−M1e
π)
6
π)
6
− cos 2(θ + π6 )
cos 2(θ − 2π
3 )
− cos 2(θ − π2 )
− cos 2(θ − π6 )
− cos 2(θ − π2 )
[ie ] =
cos 2(θ − 4π
)
3
3
(L1e + M1e ) ie + M2e ej2θ i∗e =
2
1
1
= (Ld + Lq ) ie + (Ld − Lq )ej2θ i∗e
2
2
r
I
2
1
3
r
α
α2
[Lef ] if =
3
M ejθ if = Ldf ejθ if
2 ef
(34)
(35)
Reemplazando las definiciones de los vectores espaciales
en la ecuación 30 se obtiene:
jθ ∗
e ie + e−jθ ie
vf = Rf if + p Ldf
+ Lf if
(36)
2
Transformación a vectores espaciales IV
I
El par eléctrico es:
Te =
t 1
1
iabc,f τabc,f iabc,f = [ie ]t [τee ] [ie ] + [ie ]t [τef ] if =
2
2
−1
M2e
t
j2θ
−j π
=j
[ie ] e
e 3
2
jπ
e 3
−j π
3
−j 4π
−e 3
e
e−jπ
π
j
e 3
e−jπ
− e−j2θ
−e
−j 8π
3
π
−j π
3
−1
j
e 3
jπ
e 3
−j π
e 3
j 4π
−e 3
ejπ
ejπ
j
−e 3
e
8π
[ie ]+· · ·
1
1
Mef
2π
t
jθ −j 2π
−jθ
j
[ie ] e e 3 − e e 3 if =
···+j
2
4π
4π
e−j 3
ej 3
n
o M r3 n
o
3
−jθ
2
jθ ∗ 2
= M2e (e ie ) − (e ie ) +j ef
ejθ i∗e − e−jθ ie if =
4j
2
2
n
o
n
o
1
= (Ld − Lq )ℑm (e−jθ ie )2 + Ldf ℑm e−jθ ie if
(37)
2
Transformación a coordenadas rotóricas I
I
Para eliminar la dependencia en θ existente en el modelo
de la máquina sincrónica en vectores espaciales, es posible
referir las variables del estator al sistema de referencia del
rotor, el cual se encuentra exactamente en la posición θ
con respecto al sistema solidario con el estator.
dq
ve = vd + jvq = ve e−jθ
dq
ie = id + jiq = ie e−jθ
I
(38)
(39)
Derivando la expresión 39 se obtiene la relación siguiente:
dq
e−jθ pie = pid + jpiq + j θ̇ ie
(40)
Transformación a coordenadas rotóricas II
I
Al multiplicar la ecuación 31 por el término de rotación
e−jθ se obtiene:
e−jθ ve = Re ie e−jθ + · · ·
1
1
(Ld + Lq ) ie + (Ld − Lq )ej2θ i∗e + Ldf ejθ if
2
2
1
dq
dq
dq
vdq
+···
e = Re ie + (Ld + Lq ) pie + j θ̇ ie
2
1
dq∗
· · · + (Ld − Lq ) pidq∗
+
j
θ̇
i
+
L
pi
+
j
θ̇
i
df
f
f
e
e
2
+e−jθ p
I
⇒
(41)
Descomponiendo la expresión 41 en parte real y parte
imaginaria resulta:
vd = Re id + p (Ld id + Ldf if ) − θ̇ Lq iq = Re id + pλd − θ̇ λq
(42)
vq = Re iq + p Lq iq + θ̇ (Ld id + Ldf if ) = Re iq + pλq + θ̇ λd
(43)
Transformación a coordenadas rotóricas III
I
Realizando transformaciones semejantes en la ecuación 36
se obtiene el resultado siguiente:
Ldf h dq dq ∗ i
vf = Rf if + p
i + ie
+ Lf if =
2 e
vf = Rf if + p (Lf if + Ldf id ) = Rf if + pλf
I
(44)
Finalmente, transformando las variables espaciales de la
expresión 37 correspondiente al par eléctrico, se obtiene:
n
o
n
o
1
dq
Te = (Ld − Lq )ℑm (ie )2 + Ldf ℑm e−jθ ie if =
2
dq
dq
= Ld − Lq id iq + Ldf iq if = λd iq − λq id = λe × ie (45)
La Máquina Sincrónica I
I
El sistema de ecuaciones diferenciales que determina el
comportamiento dinámico de la máquina sincrónica se
puede expresar de la siguiente forma:
vd = Re id + pλd − ωλq
v = R i + pλ + ωλ
q
eq
q
d
v
=
R
i
+
pλ
f
f f
f
dq
dq
J ω̇ = λe × ie − Tm (ω)
Te = Ld − Lq id iq + Ldf iq if = λd iq − λq id
donde:
λd = Ld id + Ldf if , λq = Lq iq ,
λf = Lf if + Ldf id
dq
,λe = λd + jλq .
Transformación de Park
I
I
I
En la máquina sincrónica, el campo magnético rotatorio
producido por las fuerzas magnetomotrices de los
devanados estatóricos, gira a la velocidad sincrónica ωe .
El rotor de la máquina también gira a la velocidad
sincrónica ωr = ωe .
Por esta razón es conveniente referir las ecuaciones
diferenciales que definen el comportamiento de la máquina
a un sistema de coordenadas solidario con el rotor.
Transformación de Park
De acuerdo con estos lineamientos se definen los
siguientes ejes magnéticos:
Eje d : Gira con respecto al estator a la
velocidad del rotor, y en todo
momento se encuentra colineal con el
eje magnético del campo.
Eje q : Rota con respecto al estator a la
velocidad del rotor, y en todo
momento se encuentra en cuadratura
con el eje magnético del campo.
Eje 0 : Fijo en el estator y se encuentra
desacoplado magnéticamente del
resto de los ejes de la máquina.
Eje f : Solidario con el sistema rotórico y
colineal con el eje magnético de la
bobina de campo.
Modelo dq de la Máquina Sincrónica
Re + Ld p
−ωLq
0
Ldf p
vd
ωLd
vq
Re + Lq p
0
ωLdf
v0 =
0
0
R0 + L0 p
0
vf
Ldf p
0
0
Rf + Lf p
Jpω = (Ld − Lq ) id iq + Ldf iq if − ρω − Tm
id
iq
i0
if
Modelo dq de la MS
Figura: Modelo en coordenadas dq0 − f de la máquina sincrónica
Potencia y Par Eléctrico
I
Las máquinas sincrónicas tienen rendimientos muy altos,
particularmente cuando son de gran potencia. En una
máquina sincrónica típica, la potencia mecánica en el eje
es prácticamente igual a la potencia eléctrica en bornes de
la máquina.
Pm = Tm · ωm ≈ Pe = Te · ωe
I
La potencia eléctrica es:
Pe (t) = va ia + vb ib + vc ic = vd id + vq iq + v0 i0
Potencia Eléctrica en RP
I
En régimen permanente equilibrado, las corrientes y las
tensiones en coordenadas transformadas son
independientes del tiempo. La potencia eléctrica se calcula
como:
Pe = 3
I
I
Xd − Xq 2
Ef Ve
sin δ + 3
V sin 2δ
Xd
2Xd Xq e
El segundo término de la expresión anterior depende de la
diferencia entre las reactancia del eje directo y cuadratura.
El primer término depende de la fuerza electromotriz Ef
producida por la corriente de campo. En una máquina de
rotor liso, este es el único término de la potencia eléctrica
que interviene en el proceso de conversión de energía.
El ángulo de carga δ
I
I
El ángulo δ se denomina ángulo de carga de la máquina y
representa la diferencia de fase entre la fuerza
electromotriz producida por el flujo del campo y la tensión
de armadura.
El ángulo de carga define el estado o punto de operación
de la máquina, es análogo a la variable deslizamiento en el
caso de la máquina de inducción.
Figura: Potencia eléctrica de la máquina sincrónica de polos salientes
Potencia Aparente
I
La potencia aparente en el estator de la máquina sincrónica
se calcula de la siguiente forma:
Se = 3Ve · I∗e = 3(Vd + jVq )(Id − jIq ) =
= 3 (Vd Id + Vq Iq ) + j(Vq Id − Vd Iq ) = Pe + jQe
I
La potencia reactiva expresada en función de las variables
del diagrama fasorial se obtiene:
Ef Ve
Ve2
Qe = 3
cos δ − 3
(Xq cos2 δ + Xd sin2 δ )
Xd
Xd Xq
Punto de Operación
I
El punto de operación de la máquina sincrónica queda
definido al conocer el valor del ángulo de carga δ
Figura: Variación de la potencia eléctrica con el ángulo de carga y
punto de máxima potencia
Ángulo de Carga Máximo
I
Para las máquinas sincrónicas de polos salientes:
s
δmax = arc cos
I
Xq2 Ef2
16(Xd − Xq )2 Ve
+
Xq Ef
1
−
2 4(Xd − Xq )Ve
Para las máquinas sincrónicas de rotor liso:
δmax = arc cos(0) =
π
E Ve
⇒ Pe max = f
2
Xs
Circuito equivalente de la máquina sincrónica
Figura: Circuitos equivalente de la máquina sincrónica en convención
motor
Rango de Inductancias de la MS
Cuadro: Rango típico de los valores de las inductancias de la máquina
sincrónica de polos salientes
Inductancia
Ldf = Lmd = Lmf
Lmq
Lσ d ≈ Lσ q = σd Ldf
Lσ f = σf Ldf
Ld = (1 + σd )Ldf
Lf = (1 + σf )Ldf
Lq = (1 + σq )Lmq
0
Ld = Ld −
0
Lf = Lf −
L2df
Lf
L2df
Ld
Rango en pu
0, 7 ∼ 1, 1
0, 5 ∼ 0, 7
(0, 1 ∼ 0, 2) Ldf
(0, 2 ∼ 0, 3) Ldf
(1, 1 ∼ 1, 2) Ldf
(1, 2 ∼ 1, 3) Ldf
(1, 1 ∼ 1, 2) Lmq
(0, 27 ∼ 0, 43)Ldf
(0, 29 ∼ 0, 47)Ldf
Máquinas de Imán Permanente
I
Los materiales magnéticos fueron utilizados en la
fabricación de máquinas eléctricas a partir de la década de
los cincuenta.
Figura: Característica de magnetización de los imanes permanentes.
Máquinas de Imán Permanente
Figura: Característica de remanencia del imán permanente.
Máquinas de Imán Permanente
Figura: Esquema de montaje de los imanes permanentes en el rotor.
Máquinas de Imán Permanente
I
Los esquemas de montaje superficial de los imanes (a) y
(b), originan que la reactancia de eje directo y cuadratura
sean similares (Ld ≈ Lq ) , mientras que el montaje de los
imanes embutido en el rotor origina que la reactancia de
cuadratura sea mayor que la de eje directo (Lq > Ld ). Por
las facilidades constructivas la mayoría de las máquinas
sincrónica de imán permanente presentan una disposición
superficial de los imanes.
Figura: Máquina sincrónica de imán permanente.
Ecuaciones de la MSIP Referidas al Rotor
I
Modelo dinámico de la máquina sincrónica de imán
permanente:
vd = Re id + pλd − ωλq
vq = Re iq + pλq + ωλd
dq
dq
J ω̇ = λe × ie − Tm (ω)
donde:
dq
λd = Ld id + λaf ; λq = Lq iq ; λe = λd + jλq
Ecuación del Par en una MSIP
I
I
El sistema de ecuaciones es similar al de una MS, donde el
enlace de flujo del campo, se sustituye por el producido
por el imán permanente (λaf ).
El par eléctrico de la ecuación, se obtiene:
Te = λaf iq + Ld − Lq iq id
I
Para imanes con montaje superficial esta ecuación se
reduce a:
Te = λaf iq
Accionamiento de la máquina sincrónica
Control tensión frecuencia constante
Figura: Esquema del accionamiento v /f = cte para máquinas
sincrónicas
Accionamiento de la máquina sincrónica
Control tensión frecuencia constante
Figura: Características par velocidad para el accionamiento v /f = cte
de la máquina sincrónica
Accionamiento de la máquina sincrónica
Control vectorial
I
Para simplificar la ecuación de par de la máquina
sincrónica cuando se realiza control vectorial es escoge
que la corriente del eje cuadratura de la máquina sea igual
a cero (id = 0) , en esta condición el vector espacial de
corriente y el par se reduce a:
Te = λf iq
dq
ie ≡ jiq = ie e−jθ
I
En el caso de máquinas de imán permanente se sustituye el
enlace de flujo del campo ( λf ) por el enlace de flujo
equivalente del imán (λaf ).
Accionamiento de la máquina sincrónica
Control vectorial
Figura: Diagrama de control vectorial de la máquina sincrónica
Ejemplo de MSPS
I
Máquina de sincrónica de polos salientes de 200 HP
alimentada con un puente inversor , desde un sistema
trifásico de 460V a de 60Hz. La conversión AC-DC se
realiza con un rectificador activo trifásico.
Figura: Velocidad mecánica, par eléctrico y flujo del estator para el
accionamiento de la máquina sincrónica de polos salientes
Ejemplo de MSPS
Figura: Tensión y corriente en la fase “a” del motor para el
accionamiento de la máquina sincrónica de polos salientes
Ejemplo de MSPS
Figura: Tensión y corriente en la fase “a” y Tensión en la barra de
corriente continua del rectificador de la fuente alterna el
accionamiento de la máquina sincrónica de polos salientes
Ejemplo de MSIP
I
MSIP con distribución de flujo sinusoidal de 5 HP
alimentada con un puente inversor , desde un sistema
trifásico de 220 V a 60 Hz. La conversión AC-DC se
realiza con un rectificador no controlado trifásico.
Figura: Velocidad mecánica y par eléctrico para el accionamiento de
la máquina sincrónica de imán permanente
Ejemplo de MSIP
Figura: Tensión y corriente en la fase “a” del motor para el
accionamiento de la máquina sincrónica de imán permanente
Ejemplo de MSIP
Figura: Tensión y corriente en la fase “a” de la fuente alterna el
accionamiento de la máquina sincrónica de polos salientes
Control Directo de Par
Figura: Diagrama de control directo de par de la máquina sincrónica
Control Directo de Par
Cuadro: Secuencia de disparo del inversor para el controlador directo
de par de la máquina sincrónica.
→
HB(−
λ )
HB(Te )
1
1
−1
−1
1
−1
1
−1
e
Z(1)
→
−
v5
→
−
v6
→
−
v1
→
−
v2
Z(2)
→
−
v4
→
−
v2
→
−
v5
→
−
v3
Z(3)
→
−
v6
→
−
v3
→
−
v4
→
−
v1
Z(4)
→
−
v2
→
−
v1
→
−
v6
→
−
v5
Z(5)
→
−
v3
→
−
v5
→
−
v2
→
−
v4
Z(6)
→
−
v1
→
−
v4
→
−
v3
→
−
v6
Tarea Parte III I
1. Realice el de simulación dinámica de la máquina de
inducción en el entorno Matlab utilizando el método de los
vectores espaciales. Este modelo debe tener una bomba en
el eje mecánico. Utilice este modelo para representar un
arranque controlado mediante la técnica de control directo
de par (DTC)
2. Los datos de una máquina sincrónica de polos salientes
son los siguientes:
VB
13,2 kV
ZBF
1,3864
SB
18 MVA
ZB−BF
1,3864
IBf
0,439
VBF
1,2464
nB
1,54
IBF
1,3864
Cuadro: Valores Base
ZB
1,4
TB
2,3151 s
Tarea Parte III II
Re
Ra
Rf
Ld
Lq
Lad
Laq
0,0211
0,01 ∼ 0,03
0,439
1,54
1,4
1,54
1,4
Ldf
Ldad
Lqaq
Ladf
H
ωB
1,3864
1,3864
1,2464
1,3864
2,3151 s
377 rad
Cuadro: Parámetros del modelo
La característica par-velocidad de la bomba se puede
representar mediante el siguiente polinomio:
Tm = 6, 01x10−12 nr6 − 1, 706x10−8 nr5 + 1, 953x10−5 nr4 + . . .
· · ·−1, 147x10−2 nr3 +3, 808nr2 −569, 26x10−12 nr +33758 [Nm]
Determine:
a) Las corrientes, la velocidad y el par eléctrico si se
realiza un arranque directo
Tarea Parte III III
b) Las corrientes y la velocidad utilizando un arranque con
una fuente que mantenga una relación V /f = cte
c) Un arranque a par constante utilizando el algoritmo
DTC