Lección 4 Arquitectura y Características del PLC Lección 5
Anuncio

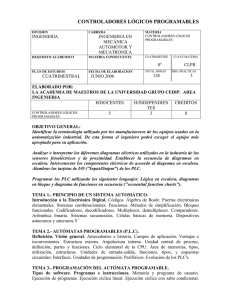
PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Lección 4 Arquitectura y Características del PLC Capacidad de memoria Características de los contadores Características de los temporizadores Resolución de los conversores ADC y DAC Reloj de tiempo real Ciclo de funcionamiento del PLC Modos de operación del PLC Tiempo de proceso Lección 5 Estructura Externa Estructura Externa Entradas Digitales y Salidas Digitales Nomenclatura de las Entradas y Salidas Naturaleza de los Circuitos de Entradas Digitales Naturaleza de los Circuitos de Salidas Digitales Corriente de los Circuitos Semana 2 - Módulo 1 -1- -2- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Otros Tipos de Entradas y Salidas Fuente de Poder Controles de Operario Interfaz de Programación Módulos de Expansión Lección 6 Estructura Interna Unidad Central de Procesos CPU Unidad Lógica y Aritmética ALU Unidad de Control Registros Bus Datos Bus Direcciones Bus de Control Memoria Memorias de Solo Lectura Memorias de Lectura-Escritura Clasificación de Volatilidad Clasificación Funcional Puertos Módulos Contadores Temporizadores PWM Conversor Digital - Análogo Conversor Análogo - Digital Comunicaciones Seriales Bus de Campo (Field Bus) o Redes de Aplicación Industrial: Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Lección 3 Arquitectura y Características del PLC A continuación, a manera de complemento al estudio de la arquitectura del PLC, se presentan algunos tópicos que deben tener en cuenta los programadores de aplicaciones. Ancho de la Memoria Número de bits que conforman una posición de memoria; es usual que las memorias tengan anchos de 8 o 16 bits. En la tabla a continuación, se presentan las denominaciones dadas a grupos de bits; son nombres convencionales en el mundo informático, así como en la vida cotidiana, llamamos docena a un grupo de doce. Número de bits 4 8 16 32 Denominación Símbolo Nibble Byte Word Doble Word B W DW Cabe aclarar, que el término Word es usado implícitamente para grupos de 16 bits, sin embargo, cuando un fabricante utiliza grupos de bits no descritos en la tabla anterior puede emplear la expresión para describir el grupo siempre y cuando haga la salvedad de a cuantos bits se esta refiriendo en sus documentos. Por ejemplo, en el caso de memorias con ancho de 14 bits, se pueden mencionar como palabras (Words) de 14 Bits. Semana 2 - Módulo 1 -3- -4- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Capacidad de Memoria Indica la cantidad de posiciones que posee la memoria. Para estas cantidades también existen convenciones: Cantidad 1.024 1’048.576 1’073’741.824 Denominación Kilo Mega Giga Símbolo K M G Los valores de capacidad y ancho se integran en una sola notación. Por ejemplo, si una memoria tiene 2.048 posiciones con un ancho de 8 bits se dice que su capacidad es de 2K Bytes o 2KB. A esta última, se le puede agregar la especificación del tipo de memoria. Así se puede hablar, por ejemplo, de una RAM de 8MB. Características de los Contadores Existen dos tipos de Contadores: los Implementados en Memoria (llamados simplemente contadores) que ejercen la función de contar por medio de ordenes del programa de usuario y los Rápidos (o Módulos Contadores) que cuentan de manera automática sin la necesidad de ordenes de programa. Para que un Contador Implementado en Memoria cuente los flancos ascendentes presentes en la entrada I1.3 se escribe en el programa la siguiente instrucción: SI I1.3 = FLANCO ASCENDENTE, ENTONCES INCREMENTE CONTADOR 1. Si antes de que se ejecute la instrucción han ocurrido dos flancos, dos eventos, el contador sólo se incrementaría en 1 y no en 2, como sería lo correcto; un contador rápido no presenta este problema. Los contadores permiten establecer los siguientes parámetros de configuración de desempeño: Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Conteo Ascendente Conteo Descendente Valor Inicial Módulo de Conteo Cargar Valor Inicial Reset La cuenta se incrementará cada vez que llega un pulso de conteo a su entrada. La cuenta descenderá cada vez que llega un pulso de conteo a su entrada. Establece el valor de inicio de la cuenta. Indica el valor de la cuenta, en el cual el contador reinicia su ciclo de conteo. Por ejemplo, un contador ascendente de módulo 60 y valor inicial 0 (cero), contará desde 00 (doble cero) hasta 59 cíclicamente. Es decir, el valor que sigue a 59 es 0 (cero). Tenga presente que se dice módulo 60 pues entre 00 (doble cero) y 59 hay 60 pasos. Ordena que el valor establecido como inicial se cargue a la cuenta. Inactiva el contador, y la cuenta inicia en 0 (cero). Semana 2 - Módulo 1 -5- -6- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Tipos de salida de un contador: Q: indica que el contador ha vuelto a la cuenta 0 después de alcanzar el valor del módulo de conteo. Cont: contiene el valor de la cuenta, dependiendo de las opciones disponibles este valor se puede leer en binario, BCD, etc. Vea en un bloque funcional como trabaja un contador: Rango de los Contadores: Indica cuantos pasos distintos de cuenta puede tener un contador, se presenta como un valor entero o en el número de bits que componen el registro de conteo. En la tabla a continuación, se presenta el número de bits y el rango de conteo correspondiente. Los contadores se ubican en cascada para obtener rangos superiores a los disponibles. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Características de los Temporizadores Su función es la de efectuar un retardo durante un tiempo t. Poseen una entrada de disparo (Trigger), una entrada de reposición R y una salida de temporizador Q. Los tipos más comunes de temporizadores son: Por Impulso, de Retardo de Conexión, de Retardo de Desconexión y Monoestable. Temporizador por Impulso La salida se activa a partir del momento en que se activa la señal de disparo y sigue así por un tiempo t. La duración del disparo debe ser mayor o igual a t, de lo contrario la temporización se suspende. Temporizador de Retardo de Desconexión La salida se activa desde el momento en que se presenta la señal de disparo, y se desactiva un tiempo t después de desaparecer el disparo. Temporizador Monoestable La salida se activa en el momento en que se presenta el disparo y esta activa durante t segundos sin importar la duración que tenga el pulso de disparo. Semana 2 - Módulo 1 -7- -8- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Resolución de los Conversores Análogo/Digital - ADC El Conversor ADC es un componente obligado de las entradas análogas; el resultado de la conversión es un valor numérico directamente proporcional a la amplitud de la señal análoga presente en la entrada. En cualquier caso se aplica la fórmula siguiente: Resolución = Rango / 2 ^ # de bits La amplitud de la señal en la entrada se calcula por: Valor de Entrada = Resolución *Resultado numérico Resolución de los DAC Para las salidas digitales las consideraciones de resolución son igual que para las entradas digitales. La amplitud de la señal de salida sería: Valor de Entrada = Resolución *Entrada numérica La resolución de los Conversores ADC y DAC depende del número de bits que conforman el registro numérico y el rango admisible en la entrada/salida análoga, como se muestra en la siguiente tabla : Rango de Entrada/ Rango de Salida 0 – 10 V -10 – +10 V 0 – 20 mA Módulo 1 - Semana 2 # de bits 13 13 16 10 13 16 10 13 16 Rango Resolución Conversores Numérico ADC y DAC 0 – 1023 9.76 mV 0 – 8191 1.22 mV 0 – 65.535 0.152 mV 0 – 1023 19.55 mV 0 – 8191 2.44 mV 0 – 65.535 0.305 mV 10 0 – 1023 19.55 µA 0 – 8191 2.44 µA 0 – 65.535 0.305 µA PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Reloj de Tiempo Real -RTCReloj Calendario de presencia obligatoria en todos los PLC modernos, permite consultar fechas (año, mes, día) y horas (hora, minutos, segundos, milisegundos) actuales y programar tareas para que ocurran en determinada fecha y hora; su funcionamiento no depende del estado de alimentación de energía del sistema pues cuenta con una pila eléctrica interna. Ciclo de Funcionamiento del PLC Memoria Imagen de Entradas: Bloque de memoria que contiene el estado de las entradas digitales del PLC. Cuando se ejecuta alguna instrucción que debe comprobar el estado de una entrada digital, en realidad se revisa el valor correspondiente en la memoria imagen y no el del circuito de entrada. Dado que la señal del circuito de entrada puede cambiar de valor en cualquier momento, la memoria imagen mantiene un único valor para ser usado por el programa y hacer que este se ejecute de manera coherente. De lo contrario, ocurrirían inconsistencias que afectarían gravemente la lógica de control y por ende el sistema físico bajo control. Semana 2 - Módulo 1 -9- -10- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 A continuación se desarrolla un ejemplo que justifica su existencia. Se programa el encendido simultáneo de dos motores: uno conectado a la salida QØ.Ø Y EL OTRO A QØ.1, A PARTIR DEL MOMENTO EN QUE EL PULSADOR ACOPLADO A LA ENTRADA IØ.Ø SE ACTIVA. Si el PLC no usa memoria imagen podría ocurrir lo siguiente: El resultado: Fallo en el programa. Si el PLC usa memoria imagen: El resultado: el programa se ejecuta conforme lo programado. Memoria Imagen de Salidas: Bloque de memoria que contiene los valores que el programa desea que estén presentes en los circuitos de salidas digitales. De hecho el programa actúa sobre las salidas, indirectamente, a través de la memoria imagen de salidas. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Modos de Operación del PLC Los cuatro son los modos de operación genéricos de los PLC: RUN, STOP, ERROR y POWER-ON. RUN: El PLC ejecuta el programa de usuario como modo normal de operación, se cumple el ciclo de funcionamiento explicado con anterioridad. STOP: El PLC ignora el programa de usuario y efectúa sus programas internos. En éste modo el usuario puede monitorear y / o programar el PLC desde un PC. ERROR: El PLC detiene la ejecución del programa de usuario, pues sus programas internos encuentran un error de programación o de hardware. Como en el caso del modo STOP, se inactiva todas las salidas y no se permite llevar a acabo el modo RUN hasta tanto no se resuelva el problema que causó el error. POWER-ON: Este modo ocurre a partir del momento en que se energiza el PLC; este utiliza el modo POWER-ON para autoconfigurarse y hacer comprobaciones de estado del sistema. Una vez realizadas las rutinas de inicio asumen según las condiciones del sistema, uno de los otros tres modos. Las reglas siguientes permiten que el programa interno pase de un modo a otro el PLC: Pasa a modo ERROR desde cualquiera de los otros tres modos, si se ha encontrado un error. De modo STOP a RUN y viceversa según se indique en el control de operario dispuesto para tal fin o desde el PC. De modo POWER-ON a modo STOP o RUN según se indique en el control de operario dispuesto para tal fin o desde el PC. Sale de modo ERROR a modo STOP o RUN según se indique en el control de operario dispuesto para tal fin o desde el PC, una vez se haya solventado el error. Semana 2 - Módulo 1 -11- -12- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Tiempo de Proceso Se llama tiempo de proceso del PLC, a aquel que se lleva en realizar un ciclo de funcionamiento, es decir, es el tiempo que tarda desde que se carga la memoria imagen de salidas hasta que nuevamente se vuelve a cargar. Esta medida indica que tan rápido puede ser un PLC y para que aplicaciones sirve. El tiempo de proceso de los PLC está en el orden de las decenas de milisegundos, aunque en los más modernos es del orden de las unidades de milisegundos. Reflexiones sobre lo visto Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Estructura Externa El PLC es una unidad electrónica que reemplaza a los dispositivos auxiliares de automatización y control desempeñando él mismo toda la lógica de automatización. Está compuesto por: • • • • • • Entradas y Salidas Digitales Fuentes de Poder. Carcasa. Control de Operario. Interfaz de Programación. Módulos de Expansión.LCCL 150 PLC CL 150 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Indicaciones LED (diodo luminoso) Interuptor Basculante Stop / Run... Pulsador Copy / Battery Interfaz V.24 para Conexión de Aparatos de Programación Campo de Escritura para Entradas Digitales Indicación de Estado para Entradas Digitales Salidas de 24V para Abastecimiento de Sensor. Entradas Digitales Campo de Escritura para Salidas Digitales Indicación de Estado para Salidas Digitales Salidas Digitales Potencial de Referencia de OV para Actuadores Conector de Enchufe para Conexión de los Módulos B-10 Abastecimiento de OV para actuadores Potencial de Referencia de OV para Tensiones de Abastecimiento Tierra Funcional Semana 2 - Módulo 1 -13- -14- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Entradas y Salidas Digitales Los PLC están provistos de entradas y salidas digitales que les permite conectarse a las diversas señales y actuadores de una aplicación especifica. A las entradas se conectan diversos tipos de interruptores los cuales serán activados por el operario o directamente por la máquina, del tipo fin de carrera. De igual manera, se admite la conexión de sensores. Cuando se conecta un interruptor o sensor a una entrada, simplemente se está permitiendo que la tensión eléctrica del punto común se presente en la entrada cuando el interruptor está cerrado y que se ausente si el interruptor está abierto. PLC CL 150 A las salidas es usual acoplar lámparas, bobinas de contactores, de relevos, de electro válvulas, entre otros. El PLC activa una salida al colocar un voltaje al elemento colocado en el circuito. Como se aprecia en la gráfica, el circuito de salida también incluye un punto común. Para el caso que estamos estudiando, tanto las salidas como las entradas admiten dos tipos de valores de tensión eléctrica: presente (activa) o ausente (inactiva). A esta bivalencia en los valores de tensión se le llama binaria; pues sólo puede reconocer dos valores distintos de señal; a las entradas y salidas binarias también se les llama entradas y salidas digitales. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Nomenclatura de las Entradas y Salidas Digitales Para designar las entradas y salidas digitales, éstas se agrupan en conjuntos de 8 bits (octetos) numerados consecutivamente: 0, 1,2…7. Por su parte, cada uno de los bits de un octeto se numera del 0 al 7. Tanto los octetos como los circuitos son separados por un punto. A las entradas digitales suele anteponerse la letra I y a las salidas la letra Q. Ejemplo: Tenemos dieciocho salidas digitales, estas se repartirían es tres octetos: 0, 1 y 2; cada uno de los bits de un octeto se numera del 0 al 7. Como son salidas se les antepondría la letra Q. En conclusión se nominarían: Q0.0, Q0.1, Q0.2, Q0.3, Q0.4, Q0.5, Q0.6, Q0.7, Q1.0, Q1.1, Q1.2, Q1.3, Q1.4, Q1.5, Q1.6, Q1.7, Q2.0 y Q2.1. Semana 2 - Módulo 1 -15- -16- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Naturaleza de los Circuitos de Entradas Digitales Las entradas digitales se caracterizan por rangos de tensión, que dependiendo del fabricante pueden asumir los siguientes valores AC o DC en voltios: 0 – 24; 0 – 48; 0 –110; El rango más frecuente de los PLC es 0 – 24. Las entradas digitales requieren de un aislamiento galvánico entre el circuito interno del PLC y el externo, para lo cual se utilizan generalmente opto aisladores. Naturaleza de los Circuitos de Salidas Digitales La salida digital más simple, que ofrece aislamiento galvánico es la de contacto normal abierto de relé, pero también son frecuentes las salidas a transistor las cuales pueden ser de tipo NPN o PNP. La anterior clasificación determina el modo en que se pueden conectar las salidas. Es necesario tener claro este concepto al momento de hacer el diseño de aplicaciones. La polaridad del punto común determina la situación de las cargas del circuito. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Corriente de los Circuitos La máxima corriente que puede fluir por los circuitos de salida depende de cada fabricante, pero en general no es superior a los 0.5 amperios por circuito. Semana 2 - Módulo 1 -17- -18- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Otros Tipos de Entradas y Salidas Digitales La complejidad de las aplicaciones de automatización requiere además de otro tipo de entrada y salida proporcionada por el PLC ésta es la análoga, o proporcional; que se utiliza para el acople de instrumentos. Los rangos de trabajo principalmente son: 0 – 10v y 4 - 20 miliamperios. Fuente de Poder Suele ser de 24 voltios, suministra los voltajes y corrientes necesarios para alimentar tanto al PLC como a sus circuitos auxiliares. Carcasa: permite la instalación del PLC en racks o rieles, cada fabricante utiliza su propio método de instalación y por lo tanto no siempre es posible intercambiar módulos de PLC de distintas marcas. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Controles de Operario Están dispuestos en la carátula del PLC, permiten al operario parar o continuar la ejecución del programa. A éste conjunto se suman las indicaciones luminosas. Interfaz de Programación La interfaz de comunicación permite la transferencia del programa desde un programador de mano específico para el PLC o computador personal provisto del software adecuado. Semana 2 - Módulo 1 -19- -20- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Módulos de Expansión Los módulos de expansión permiten ampliar el número de entradas y salidas que posee el PLC, cuando la capacidad de éste no cumple con los requerimientos de una aplicación de automatización. Algunas de las características técnicas de los módulos de expansión son: • Entradas y salidas digitales. • Entradas y salidas análogas tipo 4 a 20 miliamperios. • Entradas y salidas análogas tipo 0-10 voltios. • Expansión de memoria. • Conexión a redes de datos industriales (buses de campo). Cuando el PLC se encuentra conformando un conjunto con los módulos de expansión recibe el nombre de Unidad Principal. Ejemplo de Aplicación: Una etapa de un proceso de fabricación, esta dedicada a desplazar piezas, entre dos bandas transportadoras (B1 y B2), con ayuda de elevadores accionados mediante cilindros neumáticos. Para lo cual se dispone de un elevador basado en un cilindro neumático (Z1). Cuando el elevador llega a su altura máxima, otro cilindro (Z2) empuja la pieza hasta la segunda banda transportadora ubicada a una altura mayor. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Para el caso se necesita de Sensores y Actuadotes: 8 S0, detector de proximidad que se activa cuando la pieza está ubicada sobre la plataforma del elevador. 8 S1 y S2 sensores de fin de carrera del cilindro Z1. 8 S3 y S4 sensores de fin de carrera del cilindro Z2. 8 Y1, actuador de la electroválvula 3/2 vías para comandar al cilindro Z1. 8 Y2, actuador de la electroválvula 3/2 vías para comandar al cilindro Z2. Asignación de Circuitos: Los sensores y actuadotes requeridos son asignados a los circuitos de entrada y salida del PLC seleccionado para la aplicación, con ayuda de la siguiente tabla: Símbolo Circuito S0 I0.0 S1 I0.1 S2 I0.2 S3 I0.3 S4 I0.4 Y1 Q0.0 Descripción Detector de proximidad. Determina que hay una pieza lista para ser elevada. Detector fin de carrera. Determina que el cilindro Z1 se halla en su posición inicial. Detector fin de carrera. Determina que el cilindro Z1 se halla en su posición final. Detector fin de carrera. Determina que el cilindro Z2 se halla en su posición inicial. Detector fin de carrera. Determina que el cilindro Z2 se halla en su posición final. Electro válvula 3/2 vías. Activa al cilindro Z1. Semana 2 - Módulo 1 -21- -22- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Y2 Q0.0 Electro válvula 3/2 vías. Activa al cilindro Z2. Esquema de Conexiones A continuación se realiza el esquema de conexión teniendo en cuenta la asignación de circuitos y la fuente de poder. Los sensores y actuadotes requeridos son asignados a los circuitos de entrada y salida del PLC seleccionado para la aplicación, con ayuda de la siguiente tabla: Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Semana 2 - Módulo 1 -23- -24- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Estructura Interna Un PLC está compuesto netamente por dispositivos electrónicos cuya configuración se asemeja a la de un pequeño computador o procesador digital. La arquitectura interna del PLC se divide en cuatro grandes partes: CPU, Memoria, Puertos y Módulos. Unidad Central de Proceso – CPU Lleva a cabo la mayoría de los procesos del sistema, su desempeño depende de una lista de ejecución que se provee, denominada programa. Los programas que se ejecutan son dos, el primero de autoconfiguración cuando el sistema arranca y el segundo de usuario, diseñado para una aplicación específica. Por lo general la CPU viene integrada en un chip semi-conductor caso en el cual recibe el nombre de micro-procesador. Los principales componentes funcionales de la CPU son: La Unidad Lógica y Aritmética - ALU: Realiza operaciones aritméticas como: suma, resta, multiplicación, comparación, desplazamiento, entre otras, y operaciones lógicas como: AND, OR, EXOR, NOT, entre otras. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 La Unidad de Control: Se encarga de: a) Sincronizar las tareas de la CPU, b) Determinar todas las rutas por las cuales fluirá la información a través de los buses, y c) Interpreta el programa. La Unidad de Control, tiene como salidas, centenares de líneas de selección, invasión y conmutación requeridas por los diferentes elementos de la CPU. Su función es habilitar los niveles lógicos adecuados a tiempos y secuencias precisos, con el fin de ejecutar una instrucción completa. La entrada de la Unidad de Control cuenta con un decodificador de instrucciones que recibe el código binario correspon-diente a una instrucción de programa. La principal tarea de la Unidad de Control es leer secuencialmente los códigos de instrucción de la memoria del programa y hacer que el resto de la CPU ejecute dichas instrucciones. Lenguaje de Máquina: El programa a ejecutar es recibido por la CPU en código binario o lenguaje de máquina. Banco de Registros: Es una pequeña memoria interna de la CPU que almacena los datos temporales necesarios para la ejecución del programa. Buses: Caminos por los cuales fluye la información hacia los distintos componentes de la CPU. Los Buses se clasifican en: Bus de Datos: Canal que lleva y trae datos desde y hacia la memoria, los registros internos, la ALU y los puertos. Bus de Direcciones: Lleva valores de dirección hacia la memoria y el bus de direcciones externo. Bus de Control: Pone señales de control en los diversos bloques funcionales. Semana 2 - Módulo 1 -25- -26- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Memoria Almacén de información del sistema. Contiene datos numéricos en código binario y está dividida en posiciones de memoria, a cada una de las cuales le corresponde una dirección de memoria, cada posición de memoria es un arreglo de una determinada cantidad de bits (8 o 16 bits). Las posibilidades de acceso se clasifican en: Memorias de Solo Lectura Se utilizan para almacenar programas y datos constantes; La manera como están dispuestos los circuitos en la CPU determinan que solo se pueda leer su contenido. Existen Memorias de Solo Lectura de los siguientes tipos: Memoria de Solo Lectura - ROM (Read Only Memory): Son grabadas por el fabricante del chip y su información no puede ser alterada. Memoria de Solo Lectura Programable – PROM (Programmable Read Only Memory): Salen de la fábrica en blanco para ser programadas por el usuario por una sola vez. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Memoria de Solo Lectura Programable y Borrable - EPROM (Erasable Programmable Read Only Memory): Se diferencia de las PROM en que pueden ser borradas y reprogramadas; generalmente el borrado se efectúa con radiación ultravioleta. Memoria de Solo Lectura Programable y Borrable Eléctricamente - EEPROM - (Electrically Erasable Programmable Read Only Memory): Estas memorias de solo lectura, no se extraen del circuito de aplicación para borrarlas y programarlas de nuevo, ellas pueden borrarse y grabarse en tarjeta, si la aplicación posee los circuitos apropiados, utilizando impulsos de voltaje adecuados. Memoria EPROM Rápidas - FLASH EPROM (Flash Erasable Programmable Read Only Memory): Son en la actualidad más utilizadas que las EEPROM por contar con mejores características de capacidad de almacenamiento y tiempo de acceso. Memorias de Lectura-Escritura Memoria de Acceso Aleatorio - RAM (Random Access Memory): Utilizadas universalmente para almacenar datos variables que son escritos y leídos por la CPU. No obstante, las memorias del tipo EEPROM y FLASH EPROM pueden hacer las veces de memorias de lectura escritura. Clasificación de Volatilidad Otro criterio de clasificación de las Memorias tiene que ver con la Volatilidad de sus datos. Una Memoria es No Volátil cuando al quitarle la energía de alimentación sus datos no se borran, en este grupo se incluye a las memorias de solo lectura, enunciadas anteriormente. Por el contrario, las Memorias Volátiles pierden la información almacenada cuando se les suprime la alimentación de energía, las RAM son un ejemplo de memorias Volátiles . Semana 2 - Módulo 1 -27- -28- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 RAM No Volátiles – NOVRAM: Son RAM en cuyo chip se adosa una pila con fin de sostener la información mientras el sistema no cuenta con energía. Clasificación Funcional La clasificación funcional hace referencia a lo que contiene la memoria, que bien puede ser un programa o unos datos. Esta diferenciación se debe a que los procesadores de alto desempeño usan buses de acceso a memoria separados, es decir, que leen el programa por un camino y acceden a los datos por otro. Puertos Los puertos habilitan la comunicación de la CPU con otros dispositivos distintos a las memorias. De hecho, las Entradas / Salidas Digitales del PLC están acopladas a los puertos de la CPU por medio de circuitos de acoplamiento, estos últimos permiten que haya una adecuación desde los niveles de voltajes del sistema interno del PLC hasta los niveles de tensión y corriente eléctricas requeridos en los entornos industriales. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Módulos Se denomina Módulos a los puertos con un mayor grado de sofisticación que la simple transferencia de datos binarios. Los Módulos, son dispositivos especializados diseñados de manera autónoma con muy poca intervención de la CPU. Algunos tipos de módulos son: Contadores: Son módulos basados en contadores digitales capaces de contar eventos externos en su entrada. Semana 2 - Módulo 1 -29- -30- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Temporizadores: Básicamente son los mismos contadores pero en lugar de contar eventos externos, la señal de entrada proviene de un generador interno de frecuencia fija, que hace que el contador se incremente en periodos iguales. Como la magnitud del periodo es el tiempo, entonces, al contar pulsos en realidad se está contando el paso del tiempo. Ejemplo: el generador de reloj de la figura provee pulsos cada 0,1 segundos, una temporización de 2,3 segundos se logrará cuando el contador ha alcanzado el valor 23. Generador Modulador por Ancho de Impulso - PWM (Pulse Width Modulator): Una señal PWM es una onda cuadrada de frecuencia constante con un ciclo útil variable; son de uso frecuente en aplicaciones de control. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Conversor Análogo – Digital (ADC): Su función es medir una señal análoga y entregar en código binario el resultado que representa la amplitud de la señal de entrada. El Conversor Análogo presenta similitudes con un voltímetro digital. Conversor Digital – Análogo (DAC): Recibe un valor numérico a la entrada, convirtiéndolo en un valor analógico correspondiente, a la salida. Semana 2 - Módulo 1 -31- -32- PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Módulos de Comunicaciones Seriales: Encargados de gestionar la transmisión y recepción de información hacia y desde otros dispositivos como: PLC, computadores, entre otros. En la Comunicación Paralela los bits se trasmiten simultáneamente siendo necesarios tantos hilos como bits conformen el paquete de datos a transferir. Por el contrario, en la comunicación serial los bits se transfieren uno a uno a través de dos o tres hilos conductores, razón por la cual debe preferirse esta última. De hecho, un módulo de comunicación serial es el que permite la comunicación entre un PC y el PLC para que este pueda ser programado y/o monitoreado por el usuario. El puerto del PC más usado para este propósito es el RS232. Bus de Campo (Field Bus) o Redes de Aplicación Industrial: Permiten la interacción de datos entre una gran cantidad de dispositivos de automatización, con base en el uso de diversos protocolos de comunicación serial. Ejemplos de buses de campo son: CAN, PROFIBUS, BITBUS, MODBUS, entre otros. Módulo 1 - Semana 2 PLC - Controladores Lógicos Programables Sena Virtual Distrito Capital 2005 Reflexiones sobre lo visto Semana 2 - Módulo 1 -33-