6 Secuencia de parametrización
Anuncio

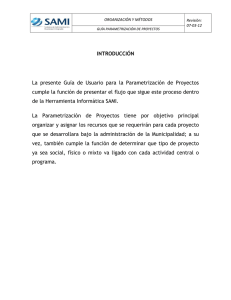
01.2000 6 Secuencia de parametrización Secuencia de parametrización La parametrización se puede subdividir básicamente en las siguientes partes: Parametrización detallada 1ª Definición de la parte de potencia (P060 = 8) 2ª Definición de tarjetas (P060 = 4) 3ª Definición de accionamiento (P060 = 5) 4ª Adaptación de función. Durante la puesta en servicio no es siempre necesario seguir en detalle todos los pasos al realizar una parametrización. Existen condiciones especiales que permiten agruparlos y reducir la parametrización por medio de la aplicación de un método rápido. Se pueden utilizar los siguientes métodos: Parametrización rápida 1° Parametrización con ajuste por el operario (Ajuste fijo o ajuste de fábrica, P060 = 2) 2° Parametrización con archivos de parámetros existentes (Download, P060 = 6) 3° Parametrización con módulos de parámetros (Parametrización rápida, P060 = 3) Según las condiciones concretas se puede realizar la parametrización detallada o por medio de uno de los métodos dados. Si se activa un ajuste fijo (P060 = 2) también se puede volver a reajustar los parámetros del equipo a sus valores originales. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-1 Secuencia de parametrización 01.2000 Condiciones de conexión Parte de potencia CUMC Tarjetas opcionales Motor Ajuste de accionamiento (P060 = 5) Adaptación de función Parametrización con ajustes del usuario (ajuste fijo, P060 = 2) Ajustes de fábrica (Reset de parámetros, P060 = 2) Parametrización con archivos de parámetros existentes (Download, P060 = 6) Parametrización con módulos de parámetros (parametrización rápida, P060 = 3) Figura 6-1 6-2 Método para parametrización rápida Definición parte de pot. (P060 = 8) Estado de suministro Configuración de tarjetas (P060 = 4) Parametrización detallada Taco-motor Parametrización rápida y parametrización detallada 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 6.1 Secuencia de parametrización Reset de parámetros al ajuste de fábrica El ajuste de fábrica es un estado definido de todos los parámetros de un equipo. En ese estado se suministran todos los equipos. Por medio del Reset de parámetro al ajuste de fábrica se puede restablecer en cualquier momento ese estado original y anular todas las modificaciones efectuadas en los parámetros del equipo desde su suministro. Los parámetros para la definición de la parte de potencia, para la liberación de opciones tecnológicas, el cuentahoras de servicio y la memoria de fallos no se cambian al hacer un reset de parámetros al ajuste de fábrica. N° de parámetro Tabla 6-1 Nombre de parámetro P070 N° de pedido 6SE70.. P072 I nom. converti. P073 P nom.converti. P366 Sel. ajuste fábr. P947 Memoria de fallo P949 Valor de fallo U977 PIN Parámetros que no se modifican al hacer el ajuste de fábrica Liberación de parametrización 6: Se permite cambiar parámetros a través de la PMU y la interface en serie SST1 (OP1S y PC) P053 = 6 P060 = 2 Selección menú "ajuste fijo" P366 = ? selección ajuste de fábrica 0: Estándar Indicación: Este parámetro ha sido correctamente ajustado antes del suministro y solo se tiene que modificar en casos excepcionales. Comienzo del reset de parámetros 0: Reset de parámetros 1: Ninguna modificación de parámetros P970 = 0 El equipo realiza el reset de parámetros y abandona los "ajustes fijos". Figura 6-2 Secuencia del reset de parámetros al ajuste de fábrica Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-3 Secuencia de parametrización 6.2 01.2000 Parametrización detallada La parametrización detallada se debe efectuar siempre que no se conozcan exactamente las condiciones de aplicación del equipo y se necesite una adaptación detallada de parámetros adecuada a las circunstancias. Se utiliza habitualmente p. ej. en la primera puesta en servicio. 6.2.1 Definición de la parte de potencia En la definición de la parte de potencia se le comunica a la electrónica de regulación el nivel de potencia del aparato en el que se encuentra. Este paso es necesario en los equipos de tipo Kompakt, chasis, y en armario. En estos aparatos, la tarjeta de regulación CUMC está en la caja electrónica y no se encuentra unida a la parte de potencia. En el estado de suministro ya se ha realizado la definición de la parte de potencia. Por eso solo se tiene que volver a hacer en caso de tener que cambiar la CUMC, no siendo necesaria bajo condiciones normales. PRECAUCION Si las tarjetas CUMC se cambian entre diferentes equipos sin redefinir la parte de potencia, se puede destruir el equipo al aplicarle la alimentación y encenderlo. Para definir la parte de potencia se tiene que poner el equipo en el estado "definición de la parte de potencia". Esto se lleva a cabo seleccionando el menú "definición de la parte de potencia". Introduciendo en este menú un número codificado se define la parte de potencia. P060 = 8 P070 = ? P060 = 1 Selección menú "definición de la parte de potencia" Introducción del n° de código para el equipo correspondiente El n° de código corresponde al n° de pedido (MLFB). El n° de pedido se puede leer en la placa indicadora de tipo del equipo. La lista de aparatos se encuentra en las siguientes págs. Regreso al menú de parámetros Figura 6-3 INDICACION 6-4 Secuencia para procesar la definición de la parte de potencia Para controlar la corrección de los datos que se han dado se deben examinar, después de regresar al menú de parámetros, los valores de la tensión de conexión en el convertidor P071 y de la intensidad del convertidor P072. Tienen que coincidir con los datos de la placa de características. 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Convertidores de frecuencia de la forma constructiva Kompakt PLUS CA-CA Onduladores de la forma constructiva Kompakt PLUS CC-CA Convertidores de frecuencia de la forma constructiva Kompakt CA-CA Secuencia de parametrización N° de pedido En [A] PWE 6SE7011-5EP50 1,5 1 6SE7013-0EP50 3,0 3 6SE7015-0EP50 5,0 5 6SE7018-0EP50 8,0 7 6SE7021-0EP50 10,0 9 6SE7021-4EP50 14,0 13 6SE7022-1EP50 20,5 15 6SE7022-7EP50 27,0 17 6SE7023-4EP50 34,0 19 En [A] PWE 6SE7012-0TP50 2,0 2 6SE7014-0TP50 4,0 4 6SE7016-0TP50 6,1 6 6SE7021-0TP50 10,2 8 6SE7021-3TP50 13,2 12 6SE7021-8TP50 17,5 14 6SE7022-6TP50 25,5 16 6SE7023-4TP50 34,0 18 6SE7023-8TP50 37,5 20 En [A] PWE 6SE7016-1EA51 6,1 3 6SE7018-0EA51 8,0 9 6SE7021-0EA51 10,2 11 6SE7021-3EB51 13,2 18 6SE7021-8EB51 17,5 25 6SE7022-6EC51 25,5 35 6SE7023-4EC51 34,0 42 6SE7023-8ED51 37,5 46 6SE7024-7ED51 47,0 52 6SE7026-0ED51 59,0 56 6SE7027-2ED51 72,0 66 N° de pedido N° de pedido Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-5 Secuencia de parametrización Onduladores de la forma constructiva Kompakt CC-CA Convertidores de frecuencia de la forma constructiva en chasis CA-CA Onduladores de la forma constructiva en chasis CC-CA 01.2000 N° de pedido En [A] PWE 6SE7016-1TA51 6,1 4 6SE7018-0TA51 8,0 10 6SE7021-0TA51 10,2 12 6SE7021-3TB51 13,2 19 6SE7021-8TB51 17,5 26 6SE7022-6TC51 25,5 36 6SE7023-4TC51 34,0 43 6SE7023-8TD51 37,5 47 6SE7024-7TD51 47,0 53 6SE7026-0TD51 59,0 57 6SE7027-2TD51 72,0 67 N° de pedido En [A] PWE 6SE7031-0EE50 92,0 74 6SE7031-2EF50 124,0 82 6SE7031-8EF50 186,0 1) 155,0 2) 98 6SE7032-1EG50 210,0 1) 175,0 2) 102 6SE7032-6EG50 260,0 1) 218,0 2) 108 6SE7033-2EG50 315,0 1) 262,0 2) 112 6SE7033-7EG50 370,0 1) 308,0 2) 116 6SE7035-1EK50 510,0 1) 423,0 2) 147 N° de pedido En [A] PWE 6SE7031-0TE50 92,0 75 6SE7031-2TF50 124,0 83 6SE7031-8TF50 186,0 1) 155,0 2) 99 6SE7032-1TG50 210,0 1) 175,0 2) 103 6SE7032-6TG50 260,0 1) 218,0 2) 109 6SE7033-2TG50 315,0 1) 262,0 2) 113 6SE7033-7TG50 370,0 1) 308,0 2) 117 6SE7035-1TJ50 510,0 1) 423,0 2) 120 1) Intensidad asignada de salida teórica para una frecuencia de pulsación de 3 kHz 2) Intensidad asignada de salida para una frecuencia de pulsación de 5 kHz; si la frecuencia de pulsación es más alta se reduce a su vez la intensidad asignada de salida permitida (véanse los datos técnicos, derating) 6-6 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 6.2.2 Secuencia de parametrización Configuración de las tarjetas En la configuración de las tarjetas se le indica a la electrónica de regulación como se deben configurar las tarjetas. Este paso siempre es necesario cuando se usan las tarjetas CBx o SLB. Para configurar las tarjetas se tiene que poner el equipo en el estado "configuración de tarjetas". Esto se lleva a cabo seleccionando el menú "configuración de tarjetas". En este menú se ajustan los parámetros necesarios para adaptar las tarjetas opcionales a las exigencias concretas (p. ej. direcciones de bus, velocidades de transmisión etc.). Al abandonar el menú se transmiten los parámetros y se inicializan las tarjetas. Selección del menú "configuración de tarjetas" P060 = 4 SCB incorporada ? No INDICACION: Solo posible en CUMC. No en equipos Kompakt PLUS. Sí P696 = ? Protocolo SCB 0: SCI 1: USS, 4 hilos 2: USS, 2 hilos 3: Peer-to-Peer CBx incorporada ? No Sí P711.1...2 = ? a P721.1...10 = ? Entrada de los parámetros CB (de 1 a 11) necesarios para las tarjetas de comunicación incorporadas CBx Los parámetros CB y su significado se deducen de los planos funcionales de cada una de las tarjetas de comunicación. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-7 Secuencia de parametrización 01.2000 SLB incorporada ? No Sí P740 = ? P741 = ? Entrada de la dirección modular SLB 0: El equipo trabaja como Dispatcher Mayor de 0: El equipo trabaja como Transceiver Entrada: tiempo de interrupción de telegrama SLB en ms 0: Ninguna vigilancia Mayor de 0: Tiempo de vigilancia en ms Potencia de emisión de la SLB (para cable fibroóptico) 1: Baja hasta 15 m longitud de cable fibroóptico P740 > 0 P740 = 0 2: Media hasta 25 m longitud de cable fibroóptico 3: Alta hasta 40 m longitud de cable fibroóptico INDICACION:si se usan fibroópticos de fibra de vidrio aumentan las posibles longitudes en un factor =7,5. Entrada de la cantidad de módulos (incl. Dispatcher) en el P743 = ? anillo SIMOLINK P742 = ? P745 = ? Entrada de la cantidad de canales por módulo P746 = ? Entrada del tiempo de ciclo SIMOLINK en ms P749.1...8 = ? Direcciones de lectura de la SLB CBx incorporada ? No Sí P918.1...2 = ? P060 = 1 6-8 Direcciones de la CB Regreso al menú de parámetros 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Código de tarjetas Secuencia de parametrización El parámetro de observación r826.x sirve para la visualización del código de tarjetas. Mediante este código se puede averiguar el tipo de tarjetas electrónicas incorporadas. Parámetro Indice Posición r826 1 Tarjeta base r826 2 Slot A r826 3 Slot B r826 4 Slot C r826 5 Slot D r826 6 Slot E r826 7 Slot F r826 8 Slot G Si en los lugares de montaje 3 ó 2 se pone una tarjeta tecnológica (T100, T300, T400) o bien una SCB1 o SCB2, encontrará su identificación de tarjeta en los siguientes índices: Códigos generales de tarjetas Parámetro Indice Posición r826 5 Lugar de montaje 2 r826 7 Lugar de montaje 3 Valor de parámetro 90 a 109 Significado Mainboards o Control Unit 110 a 119 Sensor Board (SBx) 120 a 129 Serial Communication Board (Scx) 130 a 139 Technology Board 140 a 149 Communication Board (Cbx) 150 a 169 Tarjetas especiales (Ebx, SLB) Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-9 Secuencia de parametrización Códigos especiales de tarjetas 01.2000 Tarjeta Significado CUVC Control Unit Vector Control 92 CUMC Control Unit Motion Control 93 CUMC+ Motion Control Compact PLUS 94 CUA Control Unit AFE 106 SBP Sensor Board Puls 111 SBM Sensor Board Encoder / Multiturn 112 SBM2 Sensor Board Encoder / Multiturn 2 113 SBR1 Sensor Board Resolver 1 114 SBR2 Sensor Board Resolver 2 115 SCB1 Serial Communication Board 1 (FO) 121 SCB2 Serial Communication Board 2 122 T100 Tarjeta tecnológica 131 T300 Tarjeta tecnológica 131 T400 Tarjeta tecnológica 134 CBX Communication Board 14x CBP Communication Board PROFIBUS 143 CBD Communication Board DeviceNet 145 CBC Communication Board CAN Bus 146 CBL Communication Board CC-Link 147 Communication Board PROFIBUS 2 148 EB1 Expansion Board 1 151 EB2 Expansion Board 2 152 SLB Interface de bus SIMOLINK 161 CBP2 6-10 Valor de parámetro 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 6.2.3 Secuencia de parametrización Ajuste de accionamiento En el ajuste de accionamiento se le comunica a la electrónica de regulación la tensión de alimentación del convertidor, que motor está conectado y de que taco dispone. Además se realiza la selección de la regulación del motor (control U/f o regulación vectorial) y la frecuencia de pulsación. Si lo necesita se pueden calcular automáticamente los parámetros necesarios para el modelo de motor. Adicionalmente se fijan durante el ajuste de accionamiento las normalizaciones para las señales de: intensidad, tensión, frecuencia, velocidad y par de giro. Al hacer la puesta en servicio de los motores asincrónicos, en primer lugar se tienen que introducir completamente los parámetros ya elaborados por el fabricante (véase abajo): ♦ Para esto se debe tomar en cuenta si el motor asincrónico opera con conexión en triángulo o en estrella. ♦ Se tienen que utilizar siempre los datos S-1 de la placa de características. ♦ Se tienen que introducir los datos nominales para el servicio de red (no servicio del convertidor). ♦ Se tiene que introducir siempre la intensidad asignada del motor adecuada P102 (placa de características). Si en la placa de características de algunos motores de ventilador se encuentran dos corrientes nominales diferentes, se tiene que poner el valor para M ~ n para par constante (no M ~ n2). Se puede ajustar un par de giro más alto con los límites de par y corriente. ♦ La exactitud de la intensidad asignada del motor actúa directamente sobre la exactitud de par de giro ya que el par asignado se normaliza según la intensidad asignada. Una intensidad asignada elevada en un 4 % conlleva aproximadamente a un par de giro elevado en 4 % (basado en el par asignado del motor). ♦ Para los accionamientos polimotóricos se debe introducir la intensidad asignada total P102 = x*Imot,nominal ♦ Si se conoce la corriente magnetizante asignada, se debe introducir al hacer el ajuste de accionamiento en P103 (en % Imot,nominal). A través de esto resultan más exactos los resultados de “la parametrización automática” (P115 = 1). ♦ Como, por lo general no es conocida, la corriente magnetizante asignada P103 (no confundir con la corriente en vacío cuando se opera con frecuencia asignada P107 y tensión asignada P101), se puede introducir por lo pronto 0.0 %. Con ayuda del factor de potencia (cosPHI) P104 se calcula un valor aproximado que se visualiza en r119. La experiencia demuestra que los motores de gran potencia (sobre 800 kW) suelen dar valores aproximados algo mayores y los motores de baja potencia (bajo 22 kW) algo menores. La corriente magnetizante se define como componente de intensidad formadora de campo cuando se opera en el punto asignado del motor (U = P101, f = P107, n = P108, i = P102). Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-11 Secuencia de parametrización 01.2000 ♦ Es necesario introducir los valores de la frecuencia asignada P107, de la velocidad asignada P108 y el número de pares de polos P109. ♦ Para motores asíncronos no debe registrar en P108 la velocidad síncrona en régimen de marcha en vacío, sino la velocidad asignada del motor real, es decir la frecuencia de deslizamiento para carga nominal tiene que resultar de los parámetros P107...P109. ♦ El deslizamiento asignado del motor (1 - P108/60 x P109/P107) debe ser normalmente mayor de 0,35 % x P107. Estos valores tan pequeños se alcanzan en primera instancia en motores con una gran potencia (a partir aprox. de 1000 kW). Motores de mediana potencia (45..800 kW) tienen valores de deslizamiento de 2,0...0.6 %. Motores de baja potencia (bajo 22 kW) pueden también presentar valores de deslizamiento de hasta 10 %. ♦ Si la frecuencia asignada del motor (configuración) se encuentra bajo 8 Hz, se tiene que poner en el ajuste de accionamiento P107 = 8.0 Hz. La tensión asignada del motor P101 se extrapola de acuerdo a la relación 8 Hz / fMot,nominal. De la velocidad asignada del motor P108 debe de resultar una velocidad de deslizamiento mayor: P108 = ((8 Hz - P107antiguo) x 60 / P109) + P108antiguo. INDICACION Al abandonar el menú ajuste de accionamiento se produce una verificación de verosimilitud de los valores de parámetro que se han introducido. Los ajustes de parámetros que no sean verosímiles generan un fallo. El número de los parámetros con ajuste erróneo se registra en r949 (valor de fallo). Si se selecciona como regulación del motor la regulación de intensidad, se tiene que incorporar anteriormente una tarjeta de taco (SBx) adecuada y elegir un tacogenerador de motor correspondiente. Si esto no se hace, el equipo genera asimismo un fallo al abandonar el menú ajuste de accionamiento. 6-12 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización P060 = 5 Selección menú "ajuste de accionamiento" Entrada de la tensión de conexión del equipo en V Equipos CA: valor efectivo de la corriente alterna Equipos CC: tensión del circuito intermedio P071 = ? P095 = ? P095 = 1 2 3 4 P096=? P097=? P101 = ? P102 = ? P102 = ? P103 = ? Entrada del tipo de motor 0: Ningún motor conectado 1: Motor servosincrónico ROTEC 1FT6/1FK6 2: Motor servoasincrónico ROTEC 1PH7(=1PA6)/1PL6/1PH4 3: Motor servosincrónico, en general 4: Motor servoasincrónico, en general Entrada del número codificado para el motor conectado 1FK6/1FT6 (Véase la lista en el apéndice) Entrada del número codificado para el motor conectado 1PH7(=1PA6)/1PL6/1PH4 (Véase la lista en el apéndice) Entrada de la tensión asignada del motor según la placa de características, en V Entrada de la intensidad asignada del motor según la placa indicadora de tipo, en A Intensidad de corriente magnetizante en amperios Si no la conoce, de un valor de "0". El valor se calcula entonces posteriormente en la parametrización automática. P104 = ? Entrada del factor de potencia cos (phi) según la placa de características P107 = ? Entrada de la frecuencia asignada del motor según la placa de características, en Hz P108 = ? P108 = ? Entrada de la velocidad asignada del motor según la placa de características, en 1/min Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-13 Secuencia de parametrización P095 = 1 2 3 4 P109 = ? P109 = ? P115 = ? P120 = ? Comienzo del cálculo derivado de los datos del motor Poner P115 de 0 a 1. *) Esto solo es necesario, si P095 = 2, solo para la versión software V1.24 o más antiguas. Los parámetros del motor para ajustar la regulación de intensidad se calculan con los datos de la placa de características. Cuando acaba el cálculo, P115 se pone automáticamente a 0. Entrada de la inductividad del campo principal en mH P121 = ? P121 = ? P122 = ? P123 = ? P124 = ? P128 = ? 6-14 Entrada del n° de pares de polos del motor Entrada del par asignado del motor según la placa de características, en Nm P113 = ? *) 01.2000 Entrada de la resistencia del estator en mOhm Entrada de la reactancia de dispersión total en mOhm Se preajustó al hacer el cálculo derivado de los datos del motor (P115) Entrada de la reactancia del estator en Ohm Se preajustó al hacer el cálculo derivado de los datos del motor (P115) Entrada de la constante de tiempo del inducido en ms Se preajustó al hacer el cálculo derivado de los datos del motor (P115) INDICACION: Si después de abandonar el estado "ajuste de accionamiento" (r001 = 005) se ha realizado una identificación de motor automática, ya no es necesario introducir más valores en los parámetros P120 a P124. Para el tipo de regulación de intensidad "regulación de intensidad vectorial" (P290 = 0) se debe hacer siempre una identificación de motor automática. (Véase el apartado "Identificación de motor"). Entrada de la intensidad de salida máxima en A 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización Selección del tipo de tacogenerador del motor 1: Resolver de 2 polos 2: Resolver con el par de polos del motor 3: Encoder 4: Taco multiturn 5: Generador de impulsos en Slot C 6: Generador de impulsos en Slot A o B 7: Encoder sin pista C/D P130 = ? P130 = 1, 2 3 4 N° de impulsos del encoder 9: 29 = 512 10: 210 = 1024 11: 211 = 2048 12: 212 = 4096 15: N° de impulsos = 2048 e impulso de puesta a cero no se evalúan (a partir de V1.24) Alimentación de tensión para taco EL ajuste de fábrica de 5V es el adecuado para los tacos estándar utilizados en los motores - SIEMENS Véase el plano funcional 240. P136 = ? SBM: Conmutadores S1 y S2 en la SBM (SBM2: P145.01) P147 = ? (1) 0 1 P146.01=? (0) P148 = ? P149.01...06 Ajuste de P147: 0: Ningún taco estándar, parametrización en P148, P149 1: Taco EQN1325 (Fa. Heidenhain) EnDat 2: Taco EQN1313 (Fa. Heidenhain) EnDat 3: Multiturn estándar 25 Bit SSI 4: Multiturn 21 Bit SSI 5: Singleturn 13 Bit SSI Desplazamiento del punto cero en revoluciones Indicación: El desplazamiento para ejes lineares tiene que estar dentro de la gama de valores del taco, de lo contrario, se desplaza el campo de reproducción con el offset del punto cero. N° de impulsos del taco multiturn Protocolo de configuración Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-15 Secuencia de parametrización P290 = ? P290 = 1 0 P095 = 1 o. 3 Selección del tipo de regulación de intensidad 0: Regulación de intensidad vectorial p. ej. para funcionamiento regulado por velocidad, con motores 1FT, 1PH4, 1PH7(=1PA6) y 1PL6 P095= 1: Control U/f p. ej. máquinas asíncronas sin taco 2 o. 4 P293 = ? P294 = ? P296 = ? P325 = ? 01.2000 Frecuencia de debilitamiento de campo en Hz Se preajustó al hacer el cálculo derivado de los datos del motor (P115). Selección regulación de flujo 0: Regulado, regulador de flujo activo 1: Controlado, regulador de flujo inactivo Selección de la dinámica del regulador de intensidad 0: Alta dinámica 1: Media dinámica 2: Baja dinámica Entrada de la elevación de tensión para frecuencia = 0, en % P326.1...4 = ? Entrada de los puntos de frecuencia para la curva característica 1, en Hz P327.1...4 = ? Entrada de los puntos de tensión para la curva característica 1, en V P328.1...4 = ? Entrada de los puntos de frecuencia para la curva característica 2, en Hz P329.1...4 = ? Entrada de los puntos de tensión para la curva característica 2, en V P340 = ? P350 = ? P351 = ? P352 = ? P353 = ? 6-16 Frecuencia de pulsación en Hz Con la frecuencia de pulsación se define también la duración del nivel de tiempo más corto T0. Entrada del valor de referencia para todas las magnitudes de intensidad (Normalización de magnitudes para los límites de intensidad, consigna de intensidad y valores reales de intensidad) Entrada del valor de referencia para todas las magnitudes de tensión (Normalización de magnitudes para los límites de tensión, consigna de tensión y valores reales de tensión) Entrada del valor de referencia para todas las magnitudes de frecuencia (Normalización de magnitudes para los límites de frecuencia consigna y valores reales de frecuencia) Entrada del valor de referencia para todas las magnitudes de velocidad (Normalización de los límites de velocidad, consigna de velocidad y valores reales de velocidad) 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización P354 = ? Entrada del valor de referencia para todas las magnitudes de par (Normalización de los límites de par, consigna de par y valores reales de par) P452.1...4 = ? Entrada de la velocidad máxima en sentido de giro positivo, en % (referencia P353) P453.1...4 = ? Entrada de la velocidad máxima en sentido de giro negativo, en % (referencia P353) P060 = 1 INDICACION Regreso al menú de parámetros Al abandonar el menú ajuste de accionamiento se produce una verificación de verosimilitud de los valores de parámetro que se han introducido. Los ajustes de parámetros que no sean verosímiles generan un fallo. El número de los parámetros con ajuste erróneo se registra en r949 (valor de fallo). Si se selecciona como regulación del motor la regulación de intensidad, se tiene que incorporar anteriormente una tarjeta de taco (SBx) adecuada y elegir un tacogenerador de motor correspondiente. Si esto no se hace, el equipo genera asimismo un fallo al abandonar el menú ajuste de accionamiento. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-17 Secuencia de parametrización 6.2.4 01.2000 Identificación de motor A partir de la versión V1.30 se dispone de una identificación automática de motor. Para los motores de Siemens (P095 = 1 ó 2 ) se seleccionará primero el tipo de motor en P096 ó P097. Cuando se tengan motores ajenos (P095 = 3 ó 4) se tienen que indicar los datos de la placa de características y el número de pares de polos y después activar con P115 = 1 la parametrización automática. Al abandonar el estado "ajuste de accionamiento" por medio de P060 = 1, el aparato alcanza el estado "listo para la conexión" (r001 = 009). Seleccione ahora la identificación de motor poniendo P115 = 2. Conecte el convertidor en el intervalo de 30 segundos para que se ponga en marcha la medición. La alarma A078 permanece activa durante los 30 segundos. ATENCION El eje del motor puede moverse durante la medición. En los cables fluye corriente. En los bornes de salida del convertidor, y por consiguiente también en los bornes del motor, hay tensiones que pueden representar un peligro si se toca en forma indebida. PRECAUCION Hay que asegurarse que al efectuar la conexión de la potencia y del equipo no exista peligro para las personas o se generen daños en los componentes de la instalación. Si no se arranca con la medición en el intervalo de 30 seg. o se interrumpe, con un comando DES se activa el fallo F114. El estado del convertidor durante la medición es "identificación del motor en reposo activa" (r001 = 18). La medición termina automáticamente y el convertidor regresa al estado "listo para conexión“ (r001 = 009). Para funcionamiento regulado por intensidad (P290 = 0) es imprescindible realizar la identificación de motor automática al llevar a cabo la puesta en servicio. 6.2.5 Adaptación de función Después de haber definido el hardware, se lleva a cabo la adaptación de función. En este caso se realiza la selección, interconexión y adaptación, de los componentes funcionales del equipo, a las aplicaciones concretas. La parametrización se hace en el menú de parámetros con ayuda de los planos funcionales. Si necesita mayores informaciones relativas a los parámetros las puede encontrar en la lista de parámetros. Los binectores y conectores se encuentran asimismo en las listas correspondientes de binectores y conectores. Las listas mencionadas se hallan en el apéndice. 6-18 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización 6.3 Procedimiento rápido de parametrización La parametrización rápida se puede utilizar siempre que se conozcan exactamente las condiciones de aplicación de los equipos y no sea ya necesario realizar pruebas con grandes adaptaciones de parámetros. Aplicaciones características para este proceso se dan en el montaje de aparatos en máquinas en serie o al cambiar un aparato. 6.3.1 Parametrización con ajustes del usuario Si se realiza una parametrización seleccionando "ajustes fijos específicos del usuario", los parámetros del equipo se ajustan con valores que ya están predefinidos en el software. De esta manera, modificando muy pocos parámetros, se puede realizar la parametrización completa del equipo en un solo paso. Los "ajustes fijos específicos del usuario" no se encuentran en el firmware estándar. Se elaboran de acuerdo a las necesidades especiales del cliente. INDICACION Si Vd. está interesado en que se elaboren e implementen ajustes fijos especiales atendiendo a sus necesidades concretas de aplicación, póngase en contacto con la delegación de SIEMENS más próxima a su localidad. P060 = 2 Selección del menú "ajustes fijos" Selección del ajuste de fábrica deseado 0: Ajustes de fábrica 1...3: (Momentáneamente sin función) 4: Ajuste del usuario 1 5: Ajuste del usuario 2 ... P366 = ? Comienza reset de parámetros 0: Reset de parámetros 1: Ningún reset de parámetros P970 = 0 El equipo realiza el reset de parámetros y después abandona los "ajustes fijos". Figura 6-4 Secuencia de parametrización con ajustes del usuario Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-19 Secuencia de parametrización 6.3.2 01.2000 Parametrización cargando archivos de parámetros (Download, P060 = 6) Download En la parametrización a través del Download se transmiten los valores de parámetro archivados en un maestro al equipo que se va a parametrizar. Esta transmisión se lleva a cabo por medio de las interfaces en serie. Como equipos maestros se pueden utilizar: 1. Operation Panel OP1S 2. PCs con programa SIMOVIS 3. Equipos de automatización (p. ej. SIMATIC) Como interfaces en serie se pueden utilizar las interfaces en serie del equipo base SST1 y SST2 con protocolo USS (SST2 no, en la forma constructiva Kompakt PLUS) y para la transmisión de parámetros las conexiones de bus de campo (p. ej. CBP para PROFIBUS DP). Con ayuda del download se pueden permutar, todos los parámetros modificables, a un nuevo valor. 100.0A 380.0V zz *-300.000Hz #-300.000Hz Betrieb Tipo de serv. Forma constructiva Borne Puntual Kompakt PLUS Kompakt, equipos en chasis X103 X300 Kompakt PLUS Kompakt, equipos en chasis X100 X103 Fault Run I O P USS-Bus Jog 7 8 9 4 5 6 1 2 3 0 +/- Reset Bus OP1S US S vía RS 48 5 S IE ME NS P Tipo de serv. Forma constructiva Borne Puntual Kompakt PLUS Kompakt, equipos en chasis X103 X300 Laptop USS vía RS232 A S1 X101 B Tipo de serv. Forma constructiva Bus Tarjeta opcional CBx p.ej. X448 p.ej. CBP para Profibus para CBP Borne ne gú Se o l tip d us eb X103 C Equipo de automatización (p.ej.: SIMATIC S7) Figura 6-5 6-20 Transmisión de parámetros de diferentes fuentes por Download 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Download con OP1S Secuencia de parametrización El panel de mandos (Operation Panel OP1S) está en la capacidad de leer y memorizar juegos de parámetros de los equipos (Upread). Estos juegos de parámetros se pueden transferir a otros equipos por Download. Por eso, la aplicación preferente para un Download por medio del OP1S es la parametrización de aparatos de repuesto en el servicio de asistencia. Para el Download con OP1S se parte de la base que el aparato se encuentra en estado de suministro. Los parámetros relacionados con la potencia del aparato no se transmiten. Un PIN que se haya parametrizado para tener acceso a las funciones tecnológicas opcionales tampoco se modifica. (Véase al respecto el párrafo "parametrización detallada, definición de la parte de potencia") N° de parámetro Nombre de parámetro P060 Selección menú P070 N° de pedido 6SE70.. P072 I nom. converti. P073 P nom. converti. P977 PIN Tabla 6-2 Parámetros no modificables durante un Download El panel de mandos OP1S archiva y transmite también los parámetros para configurar la interface USS (P700 hasta P704). Según la parametrización del equipo del cual se haya leído por Upread el juego de parámetros, cuando se ha terminado el Download se puede interrumpir la comunicación entre el OP1S y el equipo (por motivo del cambio de parámetro de las interfaces). Para restablecer de nuevo la comunicación, interrumpa brevemente el enlace entre el OP1S y el aparato (desconectar el OP1S o el cable). Al poco tiempo, el OP1S se inicializa de nuevo y se ajusta automáticamente por medio del algoritmo de búsqueda a la nueva parametrización. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-21 Secuencia de parametrización 01.2000 Download con SIMOVIS Con asistencia del programa SIMOVIS se pueden leer de los equipos juegos de parámetros (Upread), archivarlos en el disco duro o en disquetes y retransmitirlos por Download de nuevo a los equipos. Además Vd. tiene la posibilidad de cambiar off-line los valores de parámetro y elaborar archivos de parámetros de acuerdo a las aplicaciones concretas. Estos archivos no necesitan contener la cantidad total de parámetros, sino que se pueden limitar a los parámetros relevantes para la aplicación. INDICACION El éxito de la parametrización por medio de un Download está solamente asegurado si el aparato se encuentra durante la transmisión de datos en el estado "Download". El cambio a este estado se realiza después de seleccionar el menú "Download" en el parámetro P060. Después de activar la función "Download" en el OP1S o en el programa SIMOVIS se modifica automáticamente a 6 el parámetro P060. Si se cambia la tarjeta CU de un convertidor hay que llevar a cabo, antes de la transmisión de parámetros por Download, la definición de la parte de potencia. Si solo se transmiten vía Download partes del total de la lista de parámetros se tienen siempre que transmitir también los parámetros de la siguiente tabla, ya que estos se derivan automáticamente, durante el ajuste de accionamiento, de otros parámetros. Sin embargo cuando se realiza un Download no se produce esta adaptación automáticamente. N° de parámetro Nombre de parámetro P109 N° de pares de polos P352 Frecuencia referenc. = P353 x P109 / 60 P353 Velocidad referenc. = P352 x 60 / P109 Tabla 6-3 6-22 Parámetros que siempre hay que cargar al hacer Download 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización 6.3.3 Parametrización con módulos de parámetros (parametrización rápida, P060 = 3) En el aparato se encuentran definidos y almacenados módulos de parámetros ordenados funcionalmente. Estos módulos se pueden combinar entre sí, consiguiéndose de este modo, con pocos pasos de parametrización, adaptar el aparato a la aplicación requerida. No es necesario tener conocimiento en detalle sobre el juego de parámetros completo del aparato. Existen módulos de parámetros a disposición para los siguientes grupos funcionales: 1. Motores 2. Tacos de motor 3. Tipos de regulación y control 4. Fuentes de órdenes y consignas La parametrización se realiza del siguiente modo: Vd. elige de cada grupo funcional un módulo de parámetro y después Vd. comienza la parametrización automática. De acuerdo a su elección, los parámetros del equipo necesarios se modifican automáticamente obteniendo la funcionalidad de regulación deseada. Los parámetros requeridos para el ajuste de precisión de la estructura de regulación (todos los parámetros de los planos funcionales correspondientes) se añaden de forma automática al menú del usuario (P060 = 0). P060 = 3 Selección del menú "parametrización rápida" Tensión de conexión del equipo en V Equipos CA: Valor efectivo de la corriente alterna Equipos CC: Tensión del circuito intermedio P071 = ? P095 = ? P095 = 1 2 P096 = ? P097 = ? P130 = ? Tipo de motor 0: Ningún motor conectado 1: Motor servosincrónico ROTEC 1FT6/1FK6 2: Motor servoasincrónico ROTEC 1PH7(=1PA6)/1PL6/1PH4 Entrada del número codificado para el motor conectado 1FK6/1FT6 (Véase la lista en el apéndice) Entrada del número codificado para el motor conectado 1PH7(=1PA6) / 1PH4 / 1PL6 (Véase la lista en el apéndice) Selección del tipo tacogenerador del motor 0: Sin generador 1: Resolver de 2 polos 2: Resolver con el par de polos del motor 3: Encoder 2048/revol. 4: Multiturn 2048/revol. 5: Generador de impulsos 1024/revol. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-23 Secuencia de parametrización Selección del tipo de regulación 0: Control U/f 2: Regulación de par 3: Regulación de velocidad P367 = ? Selección: fuente de órdenes y consignas 0: PMU (no en Kompakt PLUS) 1: Entrada analógica y regletero de bornes 2: Valores de consigna fija y regletero de bornes 3: Potenciómetro motorizado y regletero de bornes 4: USS 5: SIMOLINK (SLB) 6: PROFIBUS (CBP) Dirección de bus USS P368 = ? P368 = 0, 1, 2, 3 4 5 6 P700.1 = ? P740.1 = ? Entrada de la dirección de módulo SIMOLINK P918.1 = ? P370 = 1 P060 = 0 INDICACION 01.2000 Dirección PROFIBUS Inicio de la parametrización rápida 0: Sin modificación de parámetros 1: Modificación de parámetros según la combinación seleccionada de módulos de parámetros Indicación: Después de comenzar lo primero que se produce es un ajuste de fábrica automático con P366 = 0, posteriormente se realiza la parametrización correspondiente Regreso al menú del usuario La parametrización con módulos de parámetros se realiza únicamente en el juego de datos BICO 1, y en el juego de datos funcionales 1. Si se necesitan conmutaciones de juegos de datos, es necesario realizar una parametrización detallada después de haberse llevado a cabo la parametrización rápida con módulos de parámetros. La parametrización rápida se lleva a cabo en el estado del convertidor "Download". 6-24 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Módulos de planos funcionales Secuencia de parametrización En las siguientes páginas se encuentran representados los módulos de planos funcionales (planos funcionales ) para los módulos de parámetros almacenados en el software del aparato. En cada página se encuentra, comenzando por arriba, un módulo para: ♦ La fuente de órdenes y consignas ♦ El modo de regulación y ♦ El taco del motor con su correspondiente Sensor Board (SBx) Entre los diferentes módulos de planos funcionales se han trazado líneas de corte para separarlos fácilmente y poder hojearlos de forma individual. Con esto es posible agrupar con exactitud el plan funcional de la combinación de módulos de parámetros elegidos. Así se obtiene tanto una visión global sobre la funcionalidad parametrizada en el aparato, como sobre la asignación de bornes. Los parámetros funcionales y de observación que se proporcionan en los planos funcionales se transfieren automáticamente al menú de usuario y pueden ser desde ahí vigilados y modificados. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-25 Secuencia de parametrización 6-26 01.2000 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización " Fuente órdenes y consignas: Regletero de bornes y entrada analógica -X101/1 P24 -X101/2 M24 -X101/3 1 = servicio -X101/4 0 = fallo -X101/5 0 = alarma -X101/6 1 = liberación ondulador -X101/7 1 flanco = acuse -X101/8 1 = CON. 0 = DES.1 Escalada EA P630 Entrada diferencial +/- 10 V Offset EA P631 -10 V ... + 10V corresp. -100 % ... +100 % AI+ -X101/9 A Alisamiento EA P634 D AI-X101/10 " Modo regulación: Regulación velocidad r003 tensión da salida r004 intensidad de salida Velocidad referencia P353 r006 tensión circuito intermedio Norm. n-Reg. Kp1 n-Reg. Tn P235.1 P240.1 Vis. conec. vel. r041.1 (= consigna velocidad) VCF M(lím.,1) P263.1 n(máx, giro pos.) P452.1 Regul. intensidad Tiempo aceleración P462.1 Salida analógica +/- 10 V -X101/11 AA n(máx, giro neg.) P453.1 Tiempo deceler. P464.1 Offset SA P644.1 A -X101/12 VCF M(lím.,2) P264.1 y[V]= Taco motor Alisamiento SA P642.1 Escalada SA P643.1 y D Motor 3~ Vis. conec. vel. r041.2 (=valor real de velocidad) x x P643.1 100 % " Tipo de taco: Resolver Datos del resolver: - 2 polos Datos de reproducción de impulsos: - 1024 impulsos/revolución Reproducción de impulsos (solo en SBR2) 6 SBR1/2 -X410/90 Canal A+ sen + -X414/3 -X410/91 Canal A- sen - -X414/4 -X410/92 Canal B+ cos+ -X414/6 -X410/93 Canal B- cos- -X414/7 -X410/94 Impul.puesta 0 + Excitación -X414/9 -X410/95 Impul.puesta 0 - MExcitación -X414/11 Soporte pantalla " Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-27 Secuencia de parametrización 6-28 01.2000 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización " Fuente de órdenes y consignas: Regletero de bornes y valores de consigna fijos (VCF) -X101/1 P24 -X101/2 M24 -X101/3 1 = servicio -X101/4 0 = fallo -X101/5 VCF Bit 0 -X101/6 VCF Bit 1 -X101/7 1-flanco = acuse -X101/8 1 = CON. 0 = DES.1 VCF1 0 0 VCF2 0 1 VCF3 1 0 VCF4 1 1 " Modo de regul.: Regulación de par r003 tensión de salida r004 intensidad de salida Par de referencia P354 r006 tensión circuito intermedio Norm. Vis.conect.de par r039.1 (=consigna de par) VCF M(lím,1) P263.1 Regul. intensid. Motor 3~ VCF M(lím,2) P264.1 Vigilancia velocidad taco motor n(máx, giro pos.) n(máx, giro neg.) P452.1 P453.1 Salida analógica +/- 10 V -X101/12 SA A y D Escalada SA P643.1 y[V]= Alisam.SA P642.1 x x P643.1 100 % Vis.conect.de par r039.2 (=valor real velocidad) Modelo Vis.conect.velocidad r041.2 (=Val.real velocidad) " -X101/11 Offset SA P644.1 Tipo de taco: Generador de impulsos La información completa para conectar el generador de impulsos se encuentra en las instrucciones de servicio de la SBP (referencia 6SE7087-8NX84-2FA0). Datos del generador de impulsos: - Taco HTL (15 V) - 1024 Inc. - Sin canal de control SBP UB -X400/60 5 -X400/61 Canal A+ -X401/68 Canal B+ -X401/70 Imp. puesta a cero+ -X401/72 Soporte pantalla " Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-29 Secuencia de parametrización 6-30 01.2000 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización " Fuente de órdenes y consignas: Regletero de bornes y potenciómetro motorizado -X101/1 P24 -X101/2 M24 -X101/3 1 = servicio -X101/4 0 = fallo -X101/5 Tiemp.acel.pot.mot. Tiemp.decel.pot.mot. P431 P432 Pot.mot.(máx.) P421 1 = subir potenc.motoriz. -X101/6 1 = bajar potenc.motoriz. -X101/7 1-flanco = acuse -X101/8 1 = CON.0 = DES.1 Pot.mot.(mín.) P422 Conf. pot.mot. P425 00x0 = ... no se memoriza después de DES. 00x1 = ... se memoriza después de DES. " Modo de regulación: Control U/f r003 tensión de salida r004 intensidad de salida Velocid. de ref. P353 r006 tensión circuito intermedio Norm. Caract.tensión1 P327 Frecuencia de refer. n(máx, giro pos.) P352 P452.1 U .3 .4 Norm. Elevación P325 n(máx, giro neg.) P453.1 Tiemp.acelerac. Tiemp.decelerac. P462.1 P464.1 Motor 3~ .2 .1 .1 .2 .3 .4 f Caract. frecuencia1 P326 -X101/11 SA -X101/12 Offset SA P644.1 A Escalada SA P643.1 y D y[V]= x P643.1 100 % Alisamiento SA P642.1 x Vis.conect.frecuencia r043.2 (=valor real frecuencia) " Salida analógica +/- 10 V Taco motor Tipo de taco: Sin generador " Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-31 Secuencia de parametrización 6-32 01.2000 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización " Fuente de órdenes y consignas: PMU (no en la forma constructiva Kompakt PLUS) -X101/2 M24 -X101/3 1 = servicio -X101/4 0 = fallo Indicación: Las teclas subir y bajar potenciómetro motorizado solo se encuentran activas cuando se ha seleccionado previamente la visualización de servicio (r000). T.acel.pot.mot. T decel.pot.mot P431 P432 Pot.mot.(máx.) P421 1 = subir pot.motorizado 1 = bajar pot.motorizado Acuse X300 Des. 1 Con. Pot.mot.(míx.) P422 Conf.pot.mot. P425 00x0= ... sin memorizar después de des. 00x1= ... se memoriza después de des. " " " Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-33 Secuencia de parametrización 6-34 01.2000 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 01.2000 Secuencia de parametrización " Listo conexión Listo servicio Servicio Fallo activo DES.2 activa DES.3 activa Bloqueo conexión Alarma activa Desviac.cna.-real Mando demand.PZD Fallo subtensión Excitación CP GdR activo Cna.vel.pos./neg. Reserva USS Cna.compar.alcanz. Fuente de órdenes y consignas: 1 15 PKW Datos-pal.1 Datos-pal. 2 PKW PKW Datos-pal. 1 Datos-pal. 2 Recepción Valor real Valor consigna STW1 1 DES.2 CON./DES.1 1 DES.3 Liber.ondulador Arranca GdR 1 1 LiberaciónGdR Acuse Mar.impuls.bit1 1 Lib.consign. 0 1 0 0 Mar.impuls.bit2 SG pos. Fallo externo Propuesta: 15 0 0 0 1 1 Man.dem.PZD Tiemp.inte. telegr: 0 = ning.vigilan. PKW Emisión SG neg. RS485N Vel.transm: 9.6 KB 0 ZUW1 Subir pot.mot. -X100/36 PKW:4 RS485P PZD:2 Bajar pot.mot. -X100/35 " " " Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 6-35 Secuencia de parametrización 6-36 01.2000 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES