Evolución de la marcha en pacientes con parálisis cerebral y
Anuncio

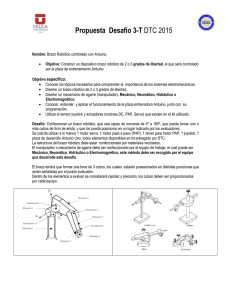
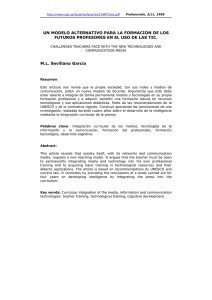
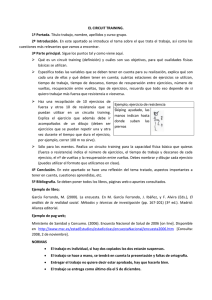
Documento descargado de http://www.elsevier.es el 20/11/2016. Copia para uso personal, se prohíbe la transmisión de este documento por cualquier medio o formato. Rehabilitación (Madr). 2014;48(1):3---8 www.elsevier.es/rh ORIGINAL Evolución de la marcha en pacientes con parálisis cerebral y desplazamiento asistido, mediante su entrenamiento con equipo de asistencia robótica P.R. Verazaluce-Rodríguez a,∗ , P. Rodríguez-Martínez b , S. Neri-Gámez c y R.M. Hernández-Aquino d a Departamento de Valoración Médica, Centro de Rehabilitación Infantil Teletón Guanajuato, Irapuato, Gto, México Departamento de Terapia Física-Mecanoterapia, Centro de Rehabilitación Infantil Teletón Guanajuato, Irapuato, Gto, México c Departamento de Enseñanza e Investigación, Centro de Rehabilitación Infantil Teletón Guanajuato, Irapuato, Gto, México d Departamento de Terapia Física-Mecanoterapia, Centro de Rehabilitación Infantil Teletón Puebla, Puebla, México b Recibido el 17 de diciembre de 2012; aceptado el 28 de abril de 2013 Disponible en Internet el 6 de noviembre de 2013 PALABRAS CLAVE Entrenamiento robótico; Marcha; Parálisis cerebral ∗ Resumen Introducción: La marcha es una compleja actividad humana, importante para la calidad de vida, y la participación en la vida social y económica. Es difícil lograrla en los pacientes con parálisis cerebral (PC), actualmente es posible mejorar su patrón mediante el entrenamiento robótico. El objetivo del estudio fue determinar si 40 sesiones de entrenamiento robótico influyen en lograr la independencia para la marcha en los pacientes con PC. Método: Se incluyeron 33 pacientes con PC que utilizaban un auxiliar para la marcha, 9 fueron femeninos y 24 masculinos, de los cuales 19 (57%) utilizaban asistencia tipo caminador, y 14 (43%) asistencia física; todos recibieron 40 sesiones de entrenamiento robótico de marcha. Para el análisis de datos se utilizó la prueba de Wilcoxon. Resultados: De los 33 pacientes incluidos, 8 (24%) lograron la marcha sin asistencia posterior a las sesiones de entrenamiento robótico, 25 (76%) continuaron utilizando ayuda técnica para la marcha; se encontró una asociación estadísticamente significativa entre el entrenamiento robótico y la independencia para la marcha. Otras variables analizadas fueron la velocidad de marcha, la descarga de peso, y la fuerza guía, no hubo diferencia estadísticamente significativa en las medias iniciales y finales. Conclusión: En el grupo estudiado se encontró una diferencia significativa en la independencia para la marcha de los pacientes antes y después del entrenamiento robótico de 40 sesiones. © 2012 Elsevier España, S.L. y SERMEF. Todos los derechos reservados. Autor para correspondencia. Correos electrónicos: verazaluce@teleton-gto.org.mx, perla verazaluce@yahoo.com (P.R. Verazaluce-Rodríguez). 0048-7120/$ – see front matter © 2012 Elsevier España, S.L. y SERMEF. Todos los derechos reservados. http://dx.doi.org/10.1016/j.rh.2013.04.006 Documento descargado de http://www.elsevier.es el 20/11/2016. Copia para uso personal, se prohíbe la transmisión de este documento por cualquier medio o formato. 4 P.R. Verazaluce-Rodríguez et al KEYWORDS Robotic training; Gait; Cerebral palsy Evolution of gait in patients with cerebral palsy and assisted movement by training with robotic help equipment Abstract Introduction: Walking is a complex human activity that is very important for quality of life, and participation in social and economic activities. It is very difficult to achieve in patients with cerebral palsy (CP). At present, it is possible to enhance their gait pattern with robotic training. The purpose of this study was to determine if 40 sessions of robotic training makes a difference in achieving walking independence in cerebral palsy patients. Method: We included 33 patients with CP who required an auxiliary aid for walking: 9 female, 24 male, 19 (57%) of whom used a walker while 14 (43%) were helped by a family member. They all received 40 robotic walking training sessions. Data analysis was performed with the Wilcoxon test. Results: Out of the 33 patients, 8 (24%) were able to walk without any help after attending the robotic training sessions, 25 (76%) continued using an auxiliary aid for gait. However, a statistically significant association was found between the robotic training and walking independence. Other variables analyzed included walking velocity, weight bearing and guide force. There was no statistically significant difference in the starting and final mean values. Conclusion: In the group studied, we found a significant difference in independence for the gait of patients before and after 40 sessions of robotic training. © 2012 Elsevier España, S.L. and SERMEF. All rights reserved. Introducción La marcha humana es un proceso de locomoción erguida del ser humano, mediante la cual es capaz de desplazar su centro de gravedad. Se basa en la secuenciación de ciclos que van desde el impacto de talón de un miembro inferior hasta el mismo momento del miembro contralateral1,2 . Se ha realizado referencia a los 4 prerrequisitos sugeridos por Perry, para desarrollar una marcha normal3 : 1. Estabilidad en la fase de apoyo 2. Suficiente espacio para avanzar el pie durante la fase de oscilación 3. Preposicionamiento 4. Una longitud del paso adecuada3 Gage, en 1991, agregó la conservación de la energía a lo antes mencionado3 . La combinación de los 4 mecanismos patológicos (deformidad, debilidad muscular, dolor y control neurológico deficitario) en las articulaciones de tobillo, rodilla y cadera provocan alteraciones específicas de la marcha en las diferentes fases de la misma4 . Las alteraciones de la marcha son frecuentes en niños con parálisis cerebral (PC), y son dependientes de la extensión y localización de la lesión5,6 . El tipo de PC, la edad del paciente, la capacidad de sedestación, la persistencia de reflejos primitivos, la espasticidad en cadera-rodilla y la epilepsia son factores predictores para desarrollar la habilidad de la marcha5 . Se ha objetivado una diferencia de postura entre ambos miembros inferiores. Así, en el lado del miembro más afectado se aprecia prolongación de la fase de oscilación (implica prolongación del ciclo de la marcha) y, por tanto, un descenso de la velocidad, la cadencia y el equilibrio6,7 . Actualmente, la medicina de rehabilitación busca estimular la plasticidad cerebral como un mecanismo de adaptación funcional del sistema nervioso central que disminuya los efectos de alteraciones estructurales o fisiológicas desencadenadas por causas exógenas o endógenas. Se ha reportado en la literatura que en los niños es mayor la capacidad de plasticidad, aún en fase crónica de la lesión cerebral8 . La rehabilitación de la marcha es un proceso importante en los pacientes con alteraciones neurológicas, se ha demostrado mediante imágenes por resonancia magnética funcional, la plasticidad supraespinal en los pacientes que recibieron entrenamiento robótico orientado a la práctica activa de la marcha9,10 . El sistema Lokomat® es la primera ortesis robótica bilateral que se utiliza en conjunto con un sistema de soporte de peso corporal para controlar los movimientos de las piernas del paciente en el plano sagital. Estas ortesis de marcha son accionadas por motores lineales que se integran en una estructura exoesquelética y, también son impulsadas por las articulaciones de cadera y rodilla9,11,12 . El equipo Lokomat® ha sido utilizado para el entrenamiento de la marcha11 , y en el sistema CRIT es la primera en utilizarse en pacientes pediátricos. Cuenta con un sistema de retroalimentación sobre la resistencia, y asistencia generadas tanto del paciente como del robot8,11,13,14 . La repetición del entrenamiento permite que un paciente pediátrico logre la deambulación, ya que fomenta cambios adaptativos en el sistema nervioso y, por ende, la capacidad del paciente de manejar las tareas presentadas15 . De esta manera se puede determinar que las tareas orientadas en el entrenamiento locomotor son factores esenciales en la recuperación de la locomoción15,16 . Se ha reportado que existen factores para inducir neuroplasticidad, y desarrollar la habilidad de la marcha funcional Documento descargado de http://www.elsevier.es el 20/11/2016. Copia para uso personal, se prohíbe la transmisión de este documento por cualquier medio o formato. Evolución de la marcha en pacientes con parálisis cerebral y desplazamiento asistido durante este tipo de entrenamiento, entre los cuales se encuentran la motivación y la atención8,9,17---19 . El objetivo del estudio fue determinar si el entrenamiento robótico influye en lograr la independencia para la marcha, después de un entrenamiento robótico en 40 sesiones en pacientes con PC. 5 Fisioterapia coadyuvante Los pacientes recibieron sesiones en mecanoterapia, tanque terapéutico y electroterapia previa al entrenamiento robótico. Análisis estadístico Método Previa aprobación del comité de Ética en la Investigación, se llevó a cabo un estudio preexperimental con diseño de un solo grupo con preprueba y posprueba en el área de mecanoterapia. Se utilizó la prueba de Wilcoxon para evaluar las diferencias de medias de la independencia para la marcha antes y después del entrenamiento robótico por medio del programa Statgraphics Centurion. Resultados Se incluyeron a los pacientes que cumplían los siguientes criterios de inclusión: pacientes de CRIT Guanajuato, con diagnóstico de PC, género femenino y masculino, escala de función motora gruesa (GMFS) 2-3, desplazamiento con ayuda técnica para la marcha y consentimiento informado por escrito. Criterios de exclusión: no adaptación de la ortesis robótica al cuerpo del paciente, déficit intelectual severo, contracturas estructuradas en cadera-rodilla-tobillo, inestabilidad ósea, lesiones dérmicas en extremidades inferiores y de tronco, trastornos vasculares severos en extremidades inferiores, contraindicación cardiaca, asimetrías mayores de 1,5 cm en extremidades inferiores, temor o falta de cooperación del paciente, artrodesis de cadera, rodilla, tobillo y/o pie, y escoliosis dorsolumbar estructurada. Criterios de eliminación: ausentarse de citas programadas en Lokomat®. Se registró una hoja de datos por cada paciente en el que se incluyó el tipo de auxiliar para la marcha. Entrenamiento robótico Previa calibración del equipo de asistencia robótica Lokomat® con software versión 5.00; se realizó una evaluación de prueba, para determinar la adaptación ortésica del equipo al paciente, cooperación del paciente y comprensión de las indicaciones. Se realizó el registro inicial de los parámetros: velocidad 0,7-0,8 km/h, promoviendo un adecuado coeficiente del paciente, descarga de peso 50% y fuerza guía del 100%. Posteriormente, los pacientes fueron entrenados exclusivamente en el equipo de Lokomat® , recibieron 40 sesiones mediante bloques de 10 sesiones, cada sesión con una duración de 20 min recibiéndolas 2 veces por semana (75%) debido a la carencia económica y laboral de los padres. En cada sesión de entrenamiento robótico se establecieron estrategias para motivar la marcha, siendo mediante la ludoterapia, retroalimentación visual de su imagen corporal frente a un espejo y, finalmente, por el programa de bioinformación propio del equipo. Al finalizar las sesiones prescritas se realizó la prueba de postentrenamiento, registrando los mismos parámetros que en la prueba inicial. Se incluyeron 33 pacientes, 9 correspondieron al sexo femenino (27,3%), y 24 al masculino (72,7%), con una mediana de 7 años y un promedio de 7,2 años de edad (rango: 511 años de edad). Según la clasificación fisiopatológica, el 84,8% fue de tipo espástico, y por distribución topográfica el 54,5% fue del tipo de la cuadriparesia seguido de la doble hemiparesia (15,1%). De los 33 pacientes incluidos, 8 lograron la marcha sin asistencia posterior a las sesiones de entrenamiento robótico, 25 continuaron utilizando ayuda técnica para la marcha, con un alfa de 0,5 se encontró una diferencia estadísticamente significativa entre la media de independencia para la marcha antes y después del entrenamiento robótico (significación estadística = 2.74986; valor de p = 0,00596217). Además, 2 pacientes mejoraron su patrón de desplazamiento, uno con caminador, y otro con asistencia física, 2 pacientes dejaron de utilizar el caminador y lo sustituyeron por asistencia física mínima. Todos los pacientes presentaron un GMFS inicial de 3 y al finalizar el entrenamiento, 8 pacientes (24%) se reclasificaron con un GMFS 2; y el 15,3% de los que permanecieron en 3 presentaron una mejoría en el patrón de la marcha con andador y/o asistencia física, mediante la prueba de Wilcoxon se encontró una diferencia estadísticamente significativa en la clasificación en el GMFS antes y después del entrenamiento robótico. En la figura 1 se muestra el tipo de asistencia por sexo al inicio de la investigación, siendo 19 con uso del 35 33 30 Número de pacientes Participantes 25 25 20 Marcha con asistencia Marcha independiente 15 10 8 5 0 0 Antes Después Figura 1 Total de pacientes antes y después de 40 sesiones de entrenamiento robótico. Documento descargado de http://www.elsevier.es el 20/11/2016. Copia para uso personal, se prohíbe la transmisión de este documento por cualquier medio o formato. 6 P.R. Verazaluce-Rodríguez et al Figura 2 Paciente antes y después de 40 sesiones de entrenamiento robótico. Figura 3 Paciente antes y después de 40 sesiones de entrenamiento robótico. caminador (15 niños y 4 niñas) y con asistencia física 14 (9 niños y 5 niñas). Todos los pacientes recibieron 40 sesiones de entrenamiento robótico de la marcha, con el equipo Lokomat® . Utilizando la prueba de la t de Student para muestras relacionadas, no se encontró una diferencia estadísticamente significativa entre las medias iniciales y las finales de los parámetros de velocidad, descarga de peso y fuerza guía (tabla 1). En la figura 2, se muestra un paciente con dependencia a la utilización del caminador y postura inadecuada. Posterior a su entrenamiento logró su marcha libre y conllevando una mejor alineación postural. La figura 3, se muestra otro paciente con caminador, al finalizar el entrenamiento en equipo robótico; logró cambiar su tipo de asistencia, a bastón de 4 puntos sin limitar su marcha en ambientes cerrados, además de mejorar su postura dinámica y estática. También, 2 pacientes (6%) mejoraron su patrón de desplazamiento, uno con caminador y otro con asistencia física, 2 pacientes (6%) dejaron de utilizar el caminador y lo sustituyeron por asistencia física mínima. Conclusión Tabla 1 Promedios Parámetro Media inicial Media final Significancia estadística Velocidad Fuerza guía Descarga de peso 0,73 99,4 50 0,79 99,7 51,8 0,081 NS 0,418 NS 0,662 NS Correlaciones de muestras relacionadas. NS: no significativo. En el grupo estudiado se encontró una diferencia significativa en la independencia para la marcha de los pacientes antes y después del entrenamiento robótico de 40 sesiones. Discusión La marcha es una de las actividades de la vida diaria, la cual toma una gran relevancia al momento de ser modificada o perdida, ya sea en forma transitoria o permanente. Documento descargado de http://www.elsevier.es el 20/11/2016. Copia para uso personal, se prohíbe la transmisión de este documento por cualquier medio o formato. Evolución de la marcha en pacientes con parálisis cerebral y desplazamiento asistido En los pacientes con PC que logran el desplazamiento, generalmente no realizan las fases de la marcha en una forma satisfactoria; si el entrenamiento se realiza con fisioterapia convencional proporciona resultados a largo plazo, debido a la necesidad de un equipo de fisioterapeutas para cuidar la sincronía en ambas extremidades y la alineación corporal del paciente durante el entrenamiento20---22 . Actualmente, por el desarrollo tecnológico contamos con equipo robótico que nos facilita este proceso, sin embargo, existen factores de importancia para estimular el fenómeno de la neuroplasticidad, entre ellos, la motivación. Algunos autores sugieren adicionar un sistema de realidad virtual para estimularla, lo cual fue evidenciado en el entrenamiento con los niños incluidos en este proyecto18,19,23---25 . En nuestros pacientes se logró el aspecto propioceptivo y de alineación estático-dinámico en el proceso de la marcha, siendo compatible con lo reportado por Drużbicki26 . Borggraefe et al. reportan mejoría en los pacientes con PC espástica y GMFS de 1 a 4, posterior a 3 semanas de entrenamiento; en nuestra investigación también la encontramos pero en un periodo mayor27 . En nuestro estudio durante el periodo de entrenamiento se hicieron pruebas de disminución de fuerza guía y descarga de peso, sin obtener resultados favorables, debido a que estos no lograron conservar el patrón establecido inicialmente por la ortesis robótica; solo enfatizó un patrón anormal, por lo anterior el entrenamiento se enfocó principalmente a que el paciente lograra engramar el patrón fisiológico de la marcha. Dentro de los parámetros numéricos, no encontramos significación estadística en la velocidad, como lo reportado por Meyer en su subgrupo de PC, sin embargo, nuestra población con dicha afección fue mayor, y con un promedio menor de edad al estudiado por él, situación que pudiera favorecer el resultado de la mejoría en la velocidad de marcha28 . Con los datos que obtuvimos, sugerimos un seguimiento a largo plazo para disminuir parámetros como la fuerza guía, pero es de mayor importancia lograr la independencia en la marcha para favorecer la inclusión social de los niños con PC. Siendo crítica, la dosis (número de movimientos) y la intensidad (movimientos por unidad de tiempo)25 . En el estudio notamos que la motivación del paciente facilitó a participar adecuadamente en la retroalimentación y en el entrenamiento propiamente dicho; lo cual nos incentiva en continuar con el objetivo de lograrla en una forma funcional y fisiológica en nuestros pacientes. Responsabilidades éticas Protección de personas y animales. Los autores declaran que los procedimientos seguidos se conformaron a las normas éticas del comité de experimentación humana responsable y de acuerdo con la Asociación Médica Mundial y la Declaración de Helsinki. Confidencialidad de los datos. Los autores declaran que han seguido los protocolos de su centro de trabajo sobre la publicación de datos de pacientes y que todos los pacientes incluidos en el estudio han recibido información suficiente 7 y han dado su consentimiento informado por escrito para participar en dicho estudio. Derecho a la privacidad y consentimiento informado. Los autores han obtenido el consentimiento informado de los pacientes y/o sujetos referidos en el artículo. Este documento obra en poder del autor de correspondencia. Conflicto de intereses Los autores declaran no tener ningún conflicto de intereses. Agradecimientos Al sistema CRIT, especialmente al CRIT-Guanajuato por las facilidades que otorgaron para llevar a cabo este estudio. Bibliografía 1. Lehmann JF, de Lateur BJ. Análisis de la marcha: diagnóstico y manejo. En: Kottke FD, Lehmann JF, editores. Krusen Medicina física y rehabilitación. Madrid: Editorial Panamericana; 1993. p. 108---26. 2. Bernal L. Evolución de la marcha normal y patológica. Tema 30. p. 2 [consultado 14 Jun 2009]. Disponible en: http://www.luisbernal.es 3. Chaler J, Garreta R, Müller B. Técnicas instrumentales de diagnóstico y evaluación en rehabilitación: estudio de la marcha. Rehabilitación (Madr). 2005;39:305---14. 4. Análisis de la marcha humana patológica. Fundamentos de la posturografía como herramienta para el diagnóstico y valoración de los trastornos del equilibrio y su aplicación a la rehabilitación. Valencia: Instituto de Biomecánica de Valencia; módulo 3 sesión 2, cursos online; 2010. 5. Dumas HM, Haley SM, Ludlow LH, Carey TM. Recovery of ambulation during inpatient rehabilitation: physical therapist prognosis for children and adolescents with traumatic brain injury. Phys Ther. 2004;84:232---43. 6. Von Sheroeder HP, Coutts RD, Lyden PD, Billings EJ, Nickel VL. Gait parameters following stroke: a practical assessment. J Rehabil Res Dev. 1995;32:25---31. 7. Titianova EB, Tarkka IM. Asymmetry in walking performance and postural sway in patients with chronic unilateral cerebral infarction. J Rehabil Res Dev. 1995;32:236---44. 8. Bayon M, Martìnez J. Plasticidad cerebral inducida por algunas terapias aplicadas en el paciente con ictus. Rehab. 2008;42:86---91. 9. Banz R, Bolliger M, Colombo G, Dietz V, Lünenburger L. Computerized visual feedback; an adjunct to robotic-assisted gait training. Phys Ther. 2008;88:1135---45. 10. Winchester P, McColl R, Querry R, Foreman N, Mosby J, Tansey K, et al. Changes in supraspinal activation patterns following robotic locomotor therapy in motor-incomplete spinal cord injury. Neurorehabil Neural Repair. 2005;19:313---24. 11. Husemann B, Müller F, Krewer C, Heller S, Koenig E. Effects of locomotion training with assistance of a robot-driven gait orthosis in hemiparetic patients after stroke a randomized controlled pilot study. Stroke. 2007;38:349---54. 12. Hocoma AG. Sistema Lokomat® Manual de usuario. Manual para software version 4.32. Industriestrasse 4 CH-8604 Volketswil Suiza. Documento descargado de http://www.elsevier.es el 20/11/2016. Copia para uso personal, se prohíbe la transmisión de este documento por cualquier medio o formato. 8 13. Ferris DP, Sawicki GS, Daley MA. A physiologist‘s perspective on robotic exoskeletons for human locomotion. Int J HR. 2007;4:507---28. 14. Jeremy Senior Member. Paralyzed patients walk on treadmill via breakthrough machine/technology. Care Cure community. 2001;29 [consultado 31 May 2013]. Disponible en: http://sci.rutgers.edu/forum/showthread.php?t=14465. 15. Barbeau H. Locomotor training in neurorehabilitation: emerging rehabilitation concepts. Neurorehabil Neural Repair. 2003;17:3---11. 16. Hesse S, Bertelt C, Jahnke MT, Schaffrin A, Baake P, Malezic M. Treadmill training with partial body weight support compared with physiotherapy in nonambulatory hemiparetic patients. Stroke. 1995;26:976---81. 17. Banala SK, Kim SH, Agrawal SK, Scholz JP. Robot assisted gait training with active leg exoskeleton (ALEX). IEEE Trans Neural Syst Rehabil Eng. 2009;17:2---8. 18. Schuler T, Brütsch K, Müller T, van Hedel HJ, Meyer-Heim A. Virtual realities as motivational tools for robotic assisted gait training in children a surface electromyography study. NeuroRehabilitation. 2011;28:401---11. 19. Brütsch K, Koenig A, Zimmerli L, Mérillat-Koeneke S, Riener R, Jäncke L, et al. Virtual reality for enhancement of robotassisted gait training in children with central gait disorders. J Rehabil Med. 2011;43:493---9. 20. Hidler JM, Wall AE. Alterations in muscle activation patterns during robotic-assisted walking. Clin Biomech. 2005;20:184---93. P.R. Verazaluce-Rodríguez et al 21. KTI/CTI. Lokomat-innovation for global leadership. 1-6 [consultado 28 Feb 2013]. Disponible en: http://www.lokomathocoma1 22. Ferris DP, Sawicki GS, Domingo AR. Powered lower limb orthoses for gait rehabilitation. Top Spinal Cord Inj Rehabil. 2005;11:34---49. 23. Lünenburger L, Colombo G, Riener R. Biofeedback for robotic gait rehabilitation. J Neuroeng Rehabil. 2007;4:1. 24. Brütsch K, Schuler T, Koenig A, Zimmerli L, Koeneke SM, Lünenburger L, et al. Influence of virtual reality soccer game on walking performance in robotic assisted gait training for children. J Neuroeng Rehabil. 2007;7:15. 25. Castelli E. Robotic movement therapy in cerebral palsy. Devel Med Child Neurol. 2011;53:481. 26. Drużbicki M, Rusek W, Szczepanik M, Dudek J, Snela S. Assessment of the impact of orthotic gait training on balance in children with cerebral palsy. Acta Bioeng Biomech. 2010;12:53---8. 27. Borggraefe I, Schaefer JS, Klaiber M, Dabrowski E, AmmannReiffer C, Knecht B. Robotic-assisted treadmill therapy improves walking an standing performance in children and adolescents with cerebral palsy. Eur J Paediatr Neurol. 2010;14:496---502. 28. Meyer-Heim A, Borggraefe I, Ammann-Reiffer C, Berweck S, Sennhauser FH, Colombo G. Feasibility of robotic-assisted locomotor training in children with central gait impairment. Devel Med Child Neurol. 2007;49:900---6.