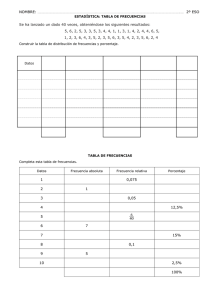
Figura 1.4 . Gráfica de Espectro Continuo Espectro Discreto . Un
Anuncio

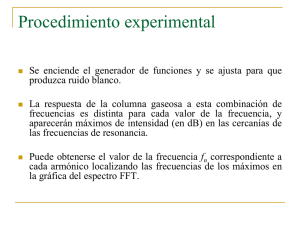
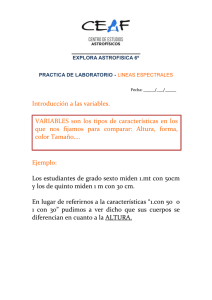
Sección 1.3. Descripción de Señales en el Dominio del Tiempo y Frecuencia 9 H(f) f 0 Figura 1.4 . Gráfica de Espectro Continuo Espectro Discreto . Un espectro es discreto si existe sólo para valores discretos de la frecuencia. La Figura 1.5, ilustra en ejemplo de espectro discreto. X(f) −f 5 −f 4−f 3−f 2 −f1 0 f1 f 2 f 3 f 4 f 5 f Figura 1.5 . Gráfica de Espectro Discreto Un espectro discreto está formado por líneas espectrales . Densidad Espectral .Dada una señal de potencia o de energía, su función densidad espectral representa la distribución de su potencia o de su energía de en el dominio de la frecuencia . Los dominios del tiempo y de la frecuencia están relacionados entre sí y en ellos se realiza la mayor parte de los estudios que se ocupa la Teoría de la Señal, como son los relacionados a transformaciones de señales, filtrado, correlación, obtención de densidades espectrales de potencia o de energía, así como los que describen los procesos de transmisión de la información y su recuperación, influencia de perturbaciones, calidad de la transmisión, etc . 1.3.3. Clasificación de Señales en el Dominio de la Frecuencia. Según las características de las señales en el dominio de la frecuencia, éstas se clasifican en : Señales de Baja Frecuencia, de Alta Frecuencia y de Media Frecuencia . Señales de Baja Frecuencia . Si una señal de potencia ( o señal de energía ) tiene su densidad espectral de potencia ( o su densidad espectral de energía ) concentrada en torno a la frecuencia cero, tal como se muestra en la Figura 1.6, se dice que es Señal de Baja Frecuencia. f 0 Figura 1.6 . Gráfica de la Densidad Espectral de Potencia (Energía) de una Señal de Baja Frecuencia 10 Capítulo 1. Conceptos Básicos de Señales y Sistemas Señales de Alta Frecuencia . Una señal es de alta frecuencia, si su densidad espectral de potencia (energía) está concentrada en altas frecuencias, como se ilustra en la Figura 1.7. 0 f Figura 1.7 . Gráfica de la Densidad Espectral de Potencia (Energía) de una Señal de Alta Frecuencia Señales de Frecuencias Medias. Una señal que tiene una densidad espectral de potencia (energía) concentrada en un rango de frecuencias comprendido entre bajas y altas frecuencias se llama Señal de Frecuencias Medias. La Figura 1.8, ilustra la densidad espectral de potencia (energía) de una señal de frecuencias medias. 0 f Figura 1.8 . Gráfica de la Densidad Espectral de Potencia (Energía) de una Señal de Frecuencias Medias Dada la relación entre la densidad espectral y el espectro de una señal , lo establecido para la densidad espectral es también válido para el espectro, en lo referente a la clasificación de señales de baja frecuencia, de alta frecuencia y de frecuencias medias. Ancho de Banda. Además de la clasificación de las señales en el dominio de la frecuencia, es importante el expresar cuantitativamente el rango de frecuencias sobre el cual está concentrada la densidad espectral de potencia o de energía. La magnitud de este rango es llamada Ancho de Banda de una señal y se refiere al rango de frecuencia en el cual está contenida un cierto porcentaje de la potencia o energía total de una señal, así por ejemplo se puede definir ancho de banda de 75% , 90% , 99% , etc . Los límites del ancho de banda son la frecuencia superior f2 y la frecuencia inferior f1 , de manera que el ancho de banda B está dado por B = f 2 − f1 (1.4) Si bien el espectro de una señal real comprende componentes para frecuencias positivas y negativas, el concepto ancho de banda se define para frecuencias positivas Sección 1.4. Clasificación de Sistemas de Tiempo Continuo 11 Señales de Banda Angosta. Se dice que una señal es de banda angosta, si se cumple la siguiente relación f +f B << 2 1 (1.5) 2 Señales de Banda Ancha. Si no se satisface la relación (1.5), se dice que la señal es de banda ancha. Señales de Banda Limitada. Una señal x(t) es de banda limitada, si su Transformada de Fourier (espectro) X(f) satisface la siguiente relación X(f ) = 0 para f > f m (1.6) donde fm es la frecuencia máxima del espectro, tal como se muestra en la Figura 1.9 X(f) f 0 fm -fm Figura 1.9 . Gráfica del Espectro de una Señal de Banda Limitada 1.4 CLASIFICACION DE SISTEMAS La primera gran clasificación de los sistemas se basa en la relación entre la naturaleza tanto de la señal de entrada como de la repuesta del sistema, en sus relaciones con respecto a la variable temporal. Bajo este criterio los sistemas se clasifican en Sistemas de Tiempo Continuo y de Sistemas de Tiempo Discreto. 1.4.1. Sistemas de Tiempo Continuo. Un sistema de tiempo continuo es aquel que transforma las señales de entrada de tiempo continuo en señales de salida de tiempo continuo. 1.4.2. Sistemas de Tiempo Discreto. Un sistema de tiempo discreto transforma las señales de entrada de tiempo discreto en señales de salida de tiempo discreto. Por otra parte, los sistemas tanto de tiempo continuo como de tiempo discreto, se pueden clasificar de acuerdo a las propiedades generales que ellos poseen. Estas propiedades tienen interpretaciones matemáticas como físicas. 1.4.3 . Sistemas con Memoria / Sistemas sin Memoria. Sistemas sin Memoria o Estáticos. Se dice que un sistema es sin memoria si su salida para cada valor de la variable independiente depende solamente de la entrada presente, o sea, de la entrada en ese mismo instante de tiempo. Sistemas con Memoria o Dinámicos. Un sistema que no cumpla con los requerimientos o condiciones de los sistemas estáticos, se dice que es un sistema dinámico o con memoria. La salida de un sistema con memoria depende teóricamente de los valores pasados, presente y futuro de la señal de entrada . 12 Capítulo 1. Conceptos Básicos de Señales y Sistemas 1.4.4. Sistemas Invariantes en el Tiempo / Sistemas Variantes en el Tiempo. Se puede subdividir la clasificación general de sistemas en dos grandes categorías: Sistemas Invariantes en el Tiempo y Sistemas Variantes en el Tiempo. Sistemas Invariantes en el Tiempo. Se tiene que un sistema es invariante en el tiempo si un desplazamiento en tiempo de la señal de entrada produce un desplazamiento en tiempo de la salida, del mismo monto que el de la entrada . Sistemas Variantes en el Tiempo. Un sistema que no cumpla la propiedad de invariancia en el tiempo se dice que es un sistema variante en el tiempo . 1.4.5. Sistemas Lineales / Sistemas no Lineales. La clase general de sistemas también puede ser dividida en Sistemas Lineales y no Lineales . Sistemas Lineales. Un sistema es lineal si satisface el Principio de Superposición: si una entrada consiste en la suma ponderada de varias señales, luego la salida es la suma ponderada de las respuestas del sistema a cada una de estas señales. SistemasIncrementalmente Lineales. Un sistema incremental lineal es aquel que responde de manera lineal a cambios en la entrada. Esto es, la diferencia entre las respuestas de un sistema incremental lineal a dos entradas cualesquiera es una función lineal (aditiva y homogénea ) de la diferencia entre las dos entradas . Sistemas no Lineales. Un sistema que no satisface el Principio de Superposición, se dice que es un sistema no lineal . 1.4.6. Sistemas Causales / Sistemas no Causales . Sistemas Causales. Un sistema es causal si su salida en cualquier instante de tiempo depende solamente de los valores de la señal de entrada en el tiempo presente y en el pasado, es decir, no depende de los valores futuros de la entrada. Sistemas no Causales. Un sistema que no cumple con la propiedad de causalidad, se dice que es un sistema no causal. 1.4.7. Sistemas Estables / Sistemas no Estables. Sistemas Estables. Intituivamente, un sistema es estable cuando entradas pequeñas conducen a respuestas que no divergen. La definición de estabilidad de un sistema es: si la entrada a un sistema es limitada (su magnitud no crece en forma ilimitada) y la respuesta del sistema es también limitada (acotada), se dice que el sistema es estable o estable BIBO (Bounded Input-Bounded Output). Sistemas Inestables. Si para una señal de entrada acotada, la salida es no acotada (infinita), se dice que el sistema es inestable . 1.4.8. Sistemas Invertibles. Un sistema es invertible si conociendo su salida se puede determinar, a partir de ella, la señal de entrada al sistema. Lo que significa, que un sistema es invertible cuando distintas señales producen salidas distintas . La propiedad de invertibilidad, permite establecer un Sistema Inverso de tal manera que cuando se conecte en cascada con el sistema original producirá una salida de la cascada igual a la entrada del primer sistema. Esta clasificación será aplicada, en los próximos capítulos, a los sistemas de tiempo continuo y a los sistemas de tiempo discreto.