Simulación del control híbrido de un modelo simplificado de órtesis
Anuncio

Asociación Española de
Ingeniería Mecánica
XVIII CONGRESO NACIONAL
DE INGENIERÍA MECÁNICA
Simulación del control híbrido de un modelo simplificado de
órtesis activa para ayuda a la marcha
S.H. Hosseinnia, B.M. Vinagre, F.J. Alonso
Dpto. de Ingeniería Eléctrica, Electrónica y Automática, Escuela de Ingenierías Industriales, Universidad de Extremadura
s.h.hoseinnia@alumnos.unex.es;{bvinagre,fjas}@unex.es
Resumen
De acuerdo con la “Encuesta de Discapacidad, Autonomía personal y situaciones de Dependencia (EDAD) “ de
2008, sólo en España aproximadamente 1.5 millones de personas tienen dificultades para caminar como
resultado de accidentes, lesiones medulares, parálisis cerebral o síndrome postpolio. Este tipo de lesionados
pueden mover sus piernas pero no son capaces de caminar adecuadamente debido a la debilidad de sus músculos,
y prodrían mejorar notablemente sus condiciones de vida con el uso de órtesis activas. Entre estas órtesis, son de
gran interés las tipo SKAFO (Stance-control Knee-Ankle-Foot Orthosis) al permitir el movimiento libre de la
rodilla durante la fase de balanceo (swing) y resitir a la flexion durante la fase de apoyo (stance) , haciendo así
posible una marcha más natural. El control de estos dispositivos debe contemplar para cada pierna varias fases o
estados caracterizados por distintas dinámicas, amén de supervisar y coordinar el movimiento de las dos piernas.
Este trabajo se enmarca dentro de un proyecto cuyo objetivo es el diseño de un controlador para una órtesis
activa modelando el sistema como un sistema híbrido en el que interactúan las dinámicas continuas
correspondientes a los modelos de los miembros y articulaciones, con la dinámica de eventos discretos
correspondiente a las distintas fases o estados y a las transiciones entre ellos. Se ha desarrollado aquí un modelo
simple suponiendo que los pacientes pueden controlar el movimiento de la cadera pero no el de la rodilla.
Considerando las dos fases de la marcha, se han diseñado dos tipos de controladores para regular el adecuado
movimiento de la rodilla. Las simulaciones muestran la efectividad de las estrategias de control propuestas.
INTRODUCTION
The inability to properly walk because of lower limb paralysis is a common result of a thoracic-level spinal cord
injury (SCI). For people with isolated quadriceps weakness or paralysis, a standard knee-ankle-foot orthosis
(KAFO) is typically prescribed to support the limb during locomotion. Many of these KAFOs support the limb
by locking the knee in full extension throughout the gait cycle to prevent the leg from collapsing while
weightbearing. The user must have good trunk control and a strong upper body because considerable effort is
required from the arms engaging parallel bars, a walker, or crutches for support.
While constraining the knee to full extension solves the body-weight support problem, straight-legged gait
introduces other issues. During swing phase, KAFO users must adopt unnatural gait strategies to bring their
braced leg forward to prepare for the next heel or foot strike. Compensatory gait patterns include increased
upper-body lateral sway, ankle plantar flexion of the contralateral foot (vaulting), hip elevation during swing
phase (hip hike), or leg circumduction [1]. Lack of knee flexion during foot strike causes abrupt initial loading
and disrupts the smooth progression of the center of mass (COM) of the body [2].
Different control strategies applied at the level of the joints for functional compensation of gait in wearable
devices. Kazerooni et al. [3], [4] proposed the application of proportional control of position for the Bleex
system, a powered lower extremity exoskeleton for human strength augmentation during locomotion. The
authors proposed the use of proportional control on each joint to cause the exoskeleton joint angles to track the
human joint angles. Myoelectric proportional control of pneumatic actuators has been proposed by Ferris et al.
[5], for regulation of artificial generation of dorsi flexion and plantar flexion torques, activated proportionally to
the amplitude of EMG signals. Variable-impedance control of ankle-foot orthoses to assist drop foot gait, is
S. Hassan HosseinNia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
2
proposed by Blaya et al. [5], discussing the application of a state machine with selective gait phase-dependent
control of the stiffness of a spring, by means of a DC motor. PD control of impedance is applied during the
swing phase (proportional to position), while impedance zero target is defined during plantar flexion trajectories.
A springclutch design for a swing phase knee orthosis controlled by a solenoid is presented by Irby et al. [6],
proposing the characterisation of gait events relying on foot contact information, provided by force-sensitive
resistors (FSR), to release and lock the knee joint during gait. Gharooni et al. [7], propose an hybrid orthosis
with a controllable brake with the aim of improving the performance of functional electrical stimulation (FES).
Sliding Mode Control (SMC) is a variable structure control method (see [8, 9] and references therein). The
multiple control structures are designed so that trajectories always move toward a switching condition, and so
the ultimate trajectory will not exist entirely within one control structure. Instead, the ultimate trajectory will
slide along the boundaries of the control structures. The motion of the system as it slides along these boundaries
is called a sliding mode and the geometrical locus consisting of the boundaries is called the sliding surface. In
the context of modern control theory, any variable structure system, like a system under SMC, may be viewed as
a special case of a hybrid dynamical system. The main strength of SMC is its robustness. Because the control
can be as simple as a switching between two states (e.g., "on"/"off" or "forward"/"reverse"), it need not be
precise and will not be sensitive to parameter variations that enter into the control channel. Additionally, because
the control law is not a continuous function, the sliding mode can be reached in finite time (i.e., better than
asymptotic behavior) and the response is usually so rapid.
In this paper, the dynamic model of the orthosis presented in [10] is obtained and control of knee angle is studied
for this system. A modified hybrid PID controller is proposed using a switching complementary controller based
on sliding mode theory. The rest of paper is organized as follows. In the next section, biomechanics of walking
and system dynamics of the orthosis is presented. Controller design and simulation results are discussed in
section 3 and 4, respectively. Finally the paper is concluded in the section 5.
BIOMECHANICS OF WALKING AND SYSTEM DYNAMICS
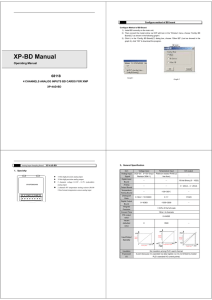
A simplified diagram of human walking gait is presented in Fig. 1. Joint motion in this plane is referred to as
flexion (positive direction) and extension (negative direction). Additionally, motion of the hip in the coronal
plane is referred to as abduction (away from the center of the body) and adduction. Further, motion of the ankle
in the coronal plane is referred to as eversion (away from the center of the body) and inversion. The remaining
degrees of freedom of the hip and ankle are referred to as simply `rotation'.
Fig. 1. Biomechanics of Walking
Fig. 2 shows the biomechanics of a normal, healthy individual (1 m leg-length), showing joint angle for hip,
knee flexion/extension motions during level-ground walking.
From Fig. 2 can be seen that there are two main phases, i.e. stance phase (SC) and swing phase (SW). Another
thing which should be considered is Ground Reaction Force (GRF) Sensors. Using the knee angle, θh, ankle
angle, θk, , and GRF, this two phases can be identified. To formulate the corresponding hybrid automation, SC
phase and SW phase are defined as q and q , respectively. The swing phase is about started in 60 percent of
gait cycle which is obvious in Fig. 1. The hybrid automaton of this system can be described as:
Simulación del control híbrido de un modelo simplificado de órtesis activa para ayuda a la marcha
3
· Q={q₁,q₂},
· X=(θh ,θk)
· Init={q₁}×{x
²,
²:-0.4< θh <0.3 & 0<θk<0.35 & GRF>0.5},
· D(q₁)={X
²: -0.4<θh<0.3 & 0< θk <0.35 & GRF>0.5},
· D(q₂)={X
²: -0.3<θh<0 & 0< θk <1.1 & GRF≤0.5},
· E={(q₁,q₂),(q₂,q₁)},
· R(q₁,q₂,X)=R(q₂,q₁,X)={X}.
Angle (Rad)
1
Knee
Hip
0.5
0
-0.5
0
20
40
60
Percent gait cycle
80
100
Fig. 2. Biomechanics of the normal person: joint angle of hip and knee
The hybrid automaton is also shown in Fig. 3, in which we can easily see the separation of stance and swing
phase.
Fig. 3. Hybrid automaton
The continuous dynamics in this system is modeled as a two-link Euler dynamics, and it is shown in Fig. 4.
Fig. 4. Mechanical representation of orthosis
S. Hassan HosseinNia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
4
The parameter and dynamics of this robot can be described as:
L1 (m1 m2 )1 m2 L22 cos(1 2 ) m2 L2 22 sin(1 2 ) g (m1 m2 ) sin(1 ) h ,
m L m L cos( ) m L 2 sin( ) gm sin( ) .
2
2
2
2
1 1
1
2
2
1
1
1
2
2
2
(1)
k
Where L1 , L2 and m1 , m2 are length and mass of the each link in Fig. (4), respectively. h and k are hip and knee
torque which should be controlled. Regarding to knee angle ( 1 2 ), it should be limited between 0 to π/2. In
addition, in this paper the aim is not to control the hip and it is supposed that the patients can control their hip
but they have problem for controlling the knee. Therefore, it is just needed to control knee and the hip is
controlled by patients and they can follow the movement as shown in Fig. 2. In order to control the knee angle to
follow the reference a PID with a sliding surface is proposed in the next section.
CONTROLLER DESIGN
A PID controller with combination of a sliding switching law is proposed to control the orthosis dynamics. As it
can be seen from Fig. 2 knee angle will always vary during the stance phase and specially swing phase and in
order to have precise movement the controller need to reach the reference value (Fig. 2), rapidly. Therefore, the
SMC controller is used to control the orthosis system. Indeed, the design procedure of sliding mode control has
the following steps:
1. Constructing a sliding surface which represents a desired system dynamics.
2. Developing a switching control law to make the sliding mode possible on every point in the sliding surface.
Any states outside the surface are driven to reach the surface in a finite time.
Correspondingly, the sliding mode control will be deigned in two phases: the reaching phase when S≠0 and the
sliding phase by S=0. Actually, in this paper PID controller plays the role of equivalent control law for the
reaching phase and the switching control law will make the responses faster and help the robustness of the
system. The error of the knee angle ( 1 2 ) and the reference value ( r ) which is shown in Fig. 2 is considered
as a sliding surface,
S 1 2 r
(2)
Consequently, the control law will be achieved as,
uPID us
(3)
d
S K i Sdt and uS K sgn( S ) . And the sgn(.) is the well-known signum function.
dt
PID controller will help the states to reach the surface and the switching law causes the states to stay in the
sliding surface. The system which is considered is nonlinear and it is not exact dynamics of the orthosis. In
addition, the PID controller is not fast enough in this case and to have more exact and faster results, linear and
precise model of orthosis is needed. Therefore, a complementary controller (switching control in this case) is
necessary. The block diagram of controlled system is depicted in Fig. 5.
where uPID K p S K d
Fig. 5. Block diagram of controlled system
Simulación del control híbrido de un modelo simplificado de órtesis activa para ayuda a la marcha
5
SIMULATION RESULTS
The simulation results are carried out using SIMULINK using simmechanics toolbox. System parameter are
selected as, m₁=3 kg, m₂=2 kg, L₁=0.433 m, L₁=0.567 m and the controller parameter are also selected as
K p 10, K d 10, K i 20 and K=10. The results are shown in Figs. 6 and 7. As it can be seen the response in
PID controller is too slow and cannot track the variable reference value. If K i increases the response will be
better and in the other hand the controller may need more energy to reach desired values. Therefore, a switching
law can make the response faster and the controller can behave more robust than the classic PID controller.
1.2
PID
PID & Sliding
Reference
Knee angle (Rad)
1
0.8
0.6
0.4
0.2
0
-0.2
0
20
40
60
Percent gait cycle
80
100
Fig. 6. Simulation results
0.8
PID
PID & Sliding
0.6
Error
0.4
0.2
0
-0.2
-0.4
0
20
40
60
Percent gait cycle
80
100
Fig. 7. Tracking error
Figs. 8 and 9 show the results for K i 20 and PID sliding controller with same parameter as pervious
simulation. As it can be seen the response for PID improved but still there is considerable error, especially in the
stance phase. As it is mentioned before this controller is applied for the people who has spinal injury and they
can walk but control of the knee is hard for them the orthosis would help them to control their knee properly.
Therefore, knee control is very important in the stance phase. As it can be seen the tracking error in the stance
phase is about 0.2 rad which may cause the patient to lose its control. In addition, the patient may have sudden
force in their knee which is not modeled in the dynamics of the system. Therefore, the behavior of the controllers
is studied in the orthosis model with an external 5 N/m torque as a not modeled disturbance. The disturbance is
applied in 50% of the gait cycle. The results are shown in the Figs. 10 and 11. As it can be seen when the
disturbance is activated the response of PID controller is not reach the reference whereas the response of PID
with switching law is reach after a short time. Therefore, the existence of a complementary controller like
switching law in this case would be necessary to control the orthosis.
S. Hassan HosseinNia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010)
1.2
PID
PID & Sliding
Reference
1
Knee angle (Rad)
0.8
0.6
0.4
0.2
0
-0.2
0
20
40
60
Percent gait cycle
80
100
Fig. 8. Simulation results
0.8
PID
PID & Sliding
0.6
Error
0.4
0.2
0
-0.2
-0.4
0
20
40
60
Percent gait cycle
80
100
Fig. 9. Tracking error
1.4
1.2
PID
PID & Sliding
Reference
Knee angle(Rad)
1
0.8
0.6
0.4
0.2
0
Unmodeled disturbance in action
-0.2
0
20
40
60
Percent gait cycle
80
100
Fig. 10. simulation results with unmolded disturbance
0.8
PID
PID & Sliding
0.6
Error
0.4
Unmodeled disturbance in action
0.2
0
-0.2
-0.4
0
20
40
60
Percent gait cycle
Fig. 11. Tracking error
80
100
6
Simulación del control híbrido de un modelo simplificado de órtesis activa para ayuda a la marcha
7
CONCLUSION
In this paper, a hybrid controller using PID controller in combination with a SMC is proposed to control the knee
angle in the orthosis model. A simple model based on Euler equation of motion is considered for two link
orthosis whereas the hip angle is considered to be controller by the patient. Since the knee strongly varies during
the swing phase and the model of the orthosis is not exact, the results for PID controller are not applicable.
Using a switching control law the error caused by PID controller is eliminated and the response improved. For
the future work, this group is considering a more exact model for orthosis and the control of hip angle would
also considered. In addition, the real application is in progress.
REFERENCIAS
[1] P Bowker, DN Condie, DL Bader, DJ Pratt, Biomechanical basis of orthotic management. Oxford (UK):
Butterworth-Heinemann; 1993.
[2] T. Yakimovich, E. D. Lemaire, J. Kofman, Engineering design review of stance-control knee-ankle-foot
orthoses, Journal of Rehabilitation Research & Development, 46(2) (2009) 257--268.
[3] Kazerooni H, Steger R, Huang L, Hybrid control of the berkeley lower extremity exoskeleton. Int J Robotics
Res, 25(5–6)(2003)561–573.
[4] 13. Kazerooni H, Steger R, Huang L Hybrid control of the Berkeley lower extremity exoskeleton. Int J
Robotics Res, 25(5)(2003) 61–573.
[5] Ferris D et al, An improved powered ankle foot orthosis using proportional myoelectric control. Gait
Posture, 23(2006)425–428.
[6] S Irby, Optimization and application of a wrap-spring clutch to a dynamic knee-ankle-foot orthosis. IEEE
Trans Rehabil Eng 7(1999)130–134.
[7] S Gharooni, B Heller, M Tokhi, A new hybrid spring brake orthosis for controlling hip and knee flexion in
the swing phase. IEEE Trans Rehabil Eng, 9(2000)106–107.
[8] V. Utkin, Sliding Mode Control Design Principles and Applications to Electric Drives, IEEE Transactions
on Industrial Electronics, 40, 1 (1993), 23-36.
[9] C. Edwards, S. Spurgeon, Sliding Mode Control: Theory and Applications. Taylor and Francis, London
1998.
[10] J. M. Font-Llagunes, G. Arroyo Eremian, F. J. Alonso, B. M. Vinagre, Diseño de una órtesis activa para
ayuda a la marcha de lesionados medulares, (Enviado a) XVIII Congreso Nacional de Ingeniería Mecánica,
Ciudad Real, Noviembre 2010.



![IFAC-PapersOnLine Volume 50 issue 1 2017 [doi 10.1016 j.ifacol.2017.08.127] Novella-Rodríguez, David F.; del Muro-Cuéllar, Basilio; Hernan -- Delayed Model Approximation and Control Design for Under](http://s2.studylib.es/store/data/008817165_1-ac1edefbf665e3f8fcdaa3b8e5ad5831-300x300.png)