En esta sección, aprenderás cómo parear un
Anuncio

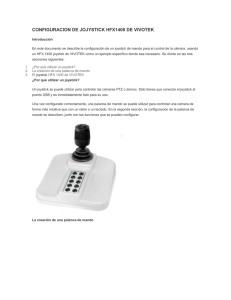
Instalación • Configuración de Sistema Actividad13 Guía de configuración Joystick VEXNet El VEXnet Joystick permite algo más que el control remoto del robot. También proporciona la comunicación inalámbrica entre la computadora y el VEX cortex (microcontrolador), permitiéndote descargar el firmware de forma inalámbrica, programas y ejecutar el depurador ROBOTC. En este documento, aprenderás cómo configurar el VEXnet Joystick utilizando ROBOTC. Este documento está dividido en 3 secciones: 1. Creación de un enlace inalámbrico entre el VEXnet joystick y el VEX Cortex. 2. Calibración de los valores del VEXnet joystick. Necesitarás: • 1 VEXnet joystick con 6 pilas AAA. • 1 pequeño desarmador. • Una computadora con ROBOTC para Cortex y PIC instalado. • 1 cable USB A-A. • 1 cable USB- programación serial. Guía de configuración Joystick VEXNet En esta sección, aprenderás cómo parear un microcontrolador Cortex VEX con un VEXnet Joystick, lo que les permite comunicarse a través de una red VEXnet. En esta sección se asume que ya has actualizado el master firmware en el VEX Cortex. VEXnet es un sistema de comunicación Wi-Fi 802.11 entre el VEX Cortex y el VEXnet Joystick. Características VEXnet : •Fácil de conectar (No hay direcciones IP, direcciones MAC, contraseñas, o modos especiales de seguridad). •Múltiples capas de seguridad incorporadas y siempre activadas. •No es necesario un punto de acceso inalámbrico, cada par VEXnet hace su propia red privada. •Cientos de robots pueden funcionar a la vez, cada robot VEXnet tiene un identificador único oculto. •Cableopcional para comunicación alámbrica. •Batería de repuesto opcional de 9V para mantener la conexión inalámbrica en una pérdida de alimentación (7.2V) principal. •El sistema de LED muestra el estado del robot, el enlace VEXnet, y el juego (en Modo de Competencia). 128 Instalación • Configuración de Sistema Actividad13 1. Comienzá por verificar qué tanto el VEX Cortex y el VEXnet Joystick están conectados a baterías cargadas. 1a- Conecte una batería al Cortex. Conecte una batería de 7.2 V al cortex, pero no lo encienda. 1b- Instale las baterías en el VexNet Joystick. Retire la tapa de las baterías del control. Instale 6 baterías AAA, y vuelva a colocar la tapa de las baterías. No encienda el control. 2.Conecta el puerto USB del VEXnet Joystick al puerto USB del Cortex mediante un cable USB A-A. 2a- Puerto USB VEXnet Joystick Conecte un extremo del cable USB A_A al puerto USB de VEXnet Joystick. 2b- Puerto USB VEX Cortex Conecte el otro extremo del cable USB A-A al puerto USB del VEX Cortex 129 Instalación • Configuración de Sistema Actividad13 3. Encienda el microcontrolador Cortex. Después de unos segundos, los LEDs ROBOT y VEXnet parpadearán en color verde, indicando que el Cortex y el VEXnet Joystick han sido sincronizados correctamente. 3a- Encienda el Cortex. Robot y VEXnet LED parpadearán en color verde una vez que el Cortex y el VEXnet Joystick han sido sincronizados correctamente. 4.- Apague el Cortex 5.- Retire el cable USB A-A de VEXnet Joystick y el Cortex 6.- Inserte las llaves USB tanto en el VEXnet Joystick y el Cortex Nota: No importa que la llave USB VEXnet se inserte en el Cortex o en el VEXnet Joystick. Vinculando el Cortex y el VEXnet Joystick se establece el enlace; las llaves USB VEXnet, simplemente actúan como antenas para enlace. 130 Instalación • Configuración de Sistema Actividad13 7. Encienda el Cortex y el Joystick. Después de aproximadamente 15 segundos, los LED´s Robot y VEXnet parpadearán en color verde, indicando que el enlace de comunicación VEXnet ha sido establecido. 7a.- Encienda el Cortex 7b.- Encienda el VEXnet Joystick 7c.- Estados de los LED’s Después de aproximadamente 15 segundos, los LEDs Robot y VEXnet comenzarán a parpadear en verde rápidamente. Con el enlace VEXnet establecido, deberás apagar el Cortex y el VEXnet Joystick para preservar la batería. Fin de sección: Creación de un enlace inalámbrico entre el VEXnet Joystick y VEX Cortex Tu VEXnet Joystick y VEX Cortex, ahora pueden comunicarse a través de las llaves VEXnet USB. 131 Instalación • Configuración de Sistema Actividad13 Calibración Joystick VEXNet Este documento contiene el procedimiento para la calibración del VEXnet Joystick. Algunos pasos son sensibles al tiempo, por lo que se recomienda leer las instrucciones una vez antes de seguir adelante. El VEXnet Joystick tiene dos palancas de mando (cada uno con ejes X y Y), 8 botones al frente y 4 botones adicionales de gatillo en la parte superior. En el interior, cuenta con un acelerómetro de 3 ejes, capaz de proporcionar valores de aceleración X-Y-Z. Los valores de los joysticks, botones y acelerómetros se envían como un flujo constante de información a través de la VEXnet al robot, lo que permite al usuario controlar el robot en tiempo real. Para asegurarse de que el VEXnet Joystick envia valores precisos, los joysticks deben ser calibrados antes de su primer uso. Usted necesitará: • Un VEXnet Joystick con baterías. • Un Cortex VEX con batería de robot. • Una pequeña llave Allen (1/16 “o inferior) o un clip. 1. Encienda en VEXnet Joystick y Cortex VEX. Permita que se sincronizen sobre VEXnet. 132 Instalación • Configuración de Sistema Actividad13 2. Mantenga pulsado el botón de disparo 6U. Mientras mantiene el botón de disparo 6U pulsado, usa tu llave Allen o un clip para pulsar el botón interno CONFIG hasta que los LEDS del JOYSTICK parpadeen en rojo y verde. 3. Mientras mantienes el botón de disparo 6U pulsado, usa tu llave Allen o un clip para pulsar el botón interno CONFIG hasta que los LEDS del JOYSTICK parpadeen en rojo y verde. 3b. Leds del JOYSTICK Una vez que los Leds del Joystick comienzan a parpadear en rojo y verde, libera el botón 6U y el botón CONFIG. 133 Instalación • Configuración de Sistema Actividad13 Importante - Instrucciones sensibles al tiempo. Hay un límite de 10 segundos para completar los pasos 4 y 5. Si no se completan en el tiempo determinado, el proceso de calibración terminará y el LED del VEXnet parpadeará brevemente en rojo. 4. Mueva las dos palancas de mando a través de sus rangos de movimiento. Cuando detecte que las palancas de mando han sido completamente rotadas, el LED del JOYSTICK dejará de parpadear en rojo y verde, y cambiará a color verde. 4a. Mueva las palancas de mando. Mueva las palancas de mando a través de sus rangos completos de movimiento: Arriba, Abajo, Izquierda, Derecha y en círculo. 4b. LEDS JOYSTICK. Una vez que el VEXnet Joystick detecta que las palancas de mando han sido rotadas completamente, el LED del JOYSTICK cambia a verde sólido, indicando que se pueden dejar de mover las palancas de mando. 134 Instalación • Configuración de Sistema Actividad13 5. Pulse el botón 8U para salvar la nueva calibración. 5a. Salvar Presiona el botón 8U para guardar la calibración joystick. El LED del Joystick parpadeará en verde durante unos segundos Información Adicional • Si la calibración es guardada, el proceso se detendrá después de 10 segundos y el LED VEXnet parpadeará en rojo. • Para cancelar la calibración, presione el botón 7U. El proceso de calibración será interrumpido y el LED VEXnet parpadeará en rojo. • Una vez que la calibración sea interrumpida o guardada, todos los LEDs reanudarán su funcionamiento normal. • El Joystick debe ser calibrado cada vez que se descargue el firmware. 135