PRÁCTICA CVV-1 Funciones vectoriales.Velocidad y aceleración.
Anuncio

PRÁCTICA CVV-1
Funciones vectoriales.Velocidad y
aceleración.
1. FUNCIONES VECTORIALES.
Una función vectorial r: ℜ→ℜ×ℜ es una función de la forma r( t ) = < x( t ), y( t ) > =
x( t ) i + y( t ) j. Su gráfica es un conjunto de puntos determinados por los extremos
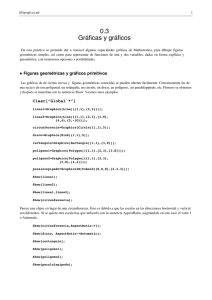
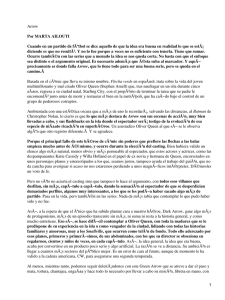
finales de los vectores r( t ). Por ejemplo, si dibujáis la trayectoria de
r( t ) = < 2cos( t ), 3sin( t ) >
usando Mathematica®, obtendréis la siguiente elipse:
- 41 -
42
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 1: Dibujar la curva plana r( t ) = < Ln( t ), (1- t ) > en el intervalo (0,1].
Las funciones vectoriales tienen límites, derivadas e integrales definidas en términos de
sus componentes. Así tenemos:
Si t representa el tiempo, entonces r’( t ) es su vector velocidad, v( t ), y r”( t ) es el
vector aceleración, a( t ). Al módulo del vector velocidad || r’( t ) || = √( x’( t )2 + y’( t )2)
se le conoce como rapidez. Observar que la rapidez es un escalar, mientras que la
velocidad es un vector.
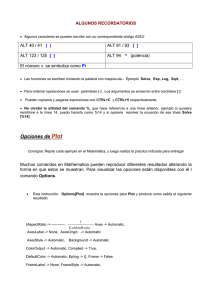
La velocidad tiene dos componentes, una la “componente en x”, que es la velocidad en la
dirección del eje de las x, x’( t ), y otra y’( t ), la “componente en y” que nos dice lo
rápido que el objeto se mueve en la dirección del eje de las y. En el gráfico anterior,
dibujar el vector velocidad sobre cada uno de los puntos considerados. Obtendréis el
siguiente gráfico:
CUADERNO DE PRÁCTICAS
43
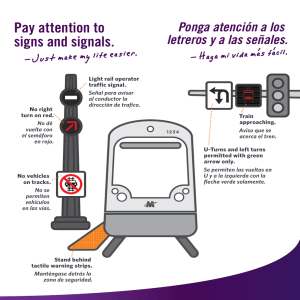
Del mismo modo podréis dibujar la aceleración a( t ). En el siguiente gráfico, he dibujado
los vectores aceleración partiendo todos del mismo punto, el origen.
Ejercicio 2: Realizar las mismas graficas de velocidad y aceleración para la curva dada
en el ejercicio 1.
2. MOVIMIENTO DE UN PROYECTIL.
Las funciones vectoriales son de gran ayuda a la hora de derivar las trayectorias de un
proyectil. Supongamos que no tenemos rozamiento con el aire, que la posición inicial en t
= 0 viene dada por s( 0 ) = < 0, h >, y que la rapidez inicial viene dada por || v( 0 ) || = v0
con un ángulo inicial Ø, entonces:
44
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
!
a!"t# " # 0, $ g %
! !" # "
!
v t
$ a!" t#!& t " # C1, $ gt ' C2 %,
donde C1 es la velocidad inicial en la dirección del eje x y C2
es la velocidad incial en el eje de las y.
Tomando v0 como hipotenusa y Ø como angulo,
la velocidad inicial en el eje x es v0!cos!"Ø#
y en el eje y es v0!sin!"Ø#.Por tanto,
! !" # " # !
v
0
v0 cos!"Ø#, v0!sin!"Ø# % ( C1 " v0!cos!"Ø# &!C2 " v0!sin!"Ø#
Es decir, !
v!"t# " # v0!cos!"Ø#, $ gt ' v0!sin!"Ø# %
gt2
! !" # "
!
' " v0!sin!" Ø## !t ' C2 %
s t
$ v!" t#!& t " # " v0!cos!" Ø## !t ' C1, $
2
donce C1, es la posición inicial en x, es decir 0 y
C2, la posición inicial en y,
es decir h. La posición en cualquier tiempo t viene dada por :
! !" # " # " !
v0 cos!"Ø##!t,
s t
$
gt2
' " v0!sin!" Ø## !t ' h % .
2
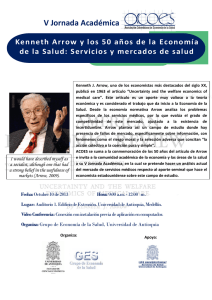
Por ejemplo, lancemos un proyectil con un ángulo de π/4 radianes, con una rapidez inicial
de 100m/sec. y una altura inicial de 8m. La posición en cualquier tiempo viene dada por
la función s( t ) = < 100cos(π/4)t, -16t2 + 100sin(π/4)t + 8 >. La velocidad es v( t ) = <
100cos(π/4), -32t + 100sin(π/4) >. La aceleración es a( t ) = < 0, -32 >. La siguiente
figura muestra la trayectoria que seguirá el proyectil.
CUADERNO DE PRÁCTICAS
45
Para encontrar el punto donde tocará de nuevo el suelo, debéis hacer y( t ) = 0, resolverla
encontrando el valor de t que produce el cero y luego hallar x( t ) para dicho valor. (en
este caso os saldrá un poco más de 320m ).
Ejercicio 3: Describir la trayectoria de una pelota de tenis golpeada a 1.5 metros del
suelo, con un ángulo de π/4 radianes respecto del suelo y con una velocidad de 50 m./s. ¿
Evitará la pelota una red de 2 metros de altura colocada a 75 metros de la posición de
lanzamiento?. Halla el momento en que la pelota tocará de nuevo el suelo.
3. FUNCIONES VECTORIALES EN 3 DIMENSIONES.
Un ejemplo de función vectorial r: ℜ→ℜ×ℜ×ℜ es la hélice cuya ecuación viene dada
por r( t ) = < cos( t ), sin( t ), t >. De nuevo su gráfica viene dada por la unión de los
extremos de los vectores r( t ).
46
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
La longitud de arco de la hélice desde t = 0 hasta t = 2 π
viene dada por la fórmula:
cuyo valor es 2 2 π.
Ejercicio 4: Dibujar la curva
4
1
r (t ) = (t , t 3 / 2 , t 2 )
3
2
Comprobar que su longitud de arco entre t=0 y t=2 es aproximadamente 4.816.
CUADERNO DE PRÁCTICAS
47
Si dibujamos con Mathematica los vectores de velocidad v( t ) en cada punto
obtendremos la gráfica:
Si dibujamos los vectores de aceleración sobre cada punto obtendremos:
48
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 5: Realizar las mismas gráficas para la curva del ejercicio 4.
CUADERNO DE PRÁCTICAS
49
PRÁCTICA CCV-2.
Funciones de dos variables .
1. CURVAS DE NIVEL.
La gráfica de una función de dos variables f son los puntos (x, y, z) tales que
z = f( x , y ).
Esta gráfica puede interpretarse como una superficie en el espacio. Existen dos maneras
de visualizarlas bien representándolas en tres dimensiones o bien representando sus
curvas de nivel. A continuación representamos de ambas maneras la curva
z = x2 + y2
utilizando las instrucciones:
•
•
Plot3D[f, ! x, xmin, xmax" , ! y, ymin, ymax" ]
ContourPlot[f, ! x, xmin, xmax" , ! y, ymin, ymax" ].
50
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Del mismo modo representamos z = x3 - y3
CUADERNO DE PRÁCTICAS
51
Ejercicio 1: Representar el hiperboloide z = (y-x) (y+x) de las dos formas mencionadas.
Este tipo de representaciones es útil para saber si tratamos con funciones continuas como
os dejará ver el siguiente ejercicio.
Ejercicio 2: Representar la función f( x, y ) = x/( x2 + y2 ) en un entorno del punto (
0, 0 ), utilizando distintas perspectivas (opción ViewPoint de Mathematica). ¿Se trata de
una función continua en dicho punto?.
2. DERIVADAS DIRECCIONALES. GRADIENTES.
Las derivadas parciales fx , fy representan las pendientes de las tangentes a una
superficie en las direcciones de los ejes x e y. Por ejemplo, dada la superficie z = 4 - x2 y2 y el punto ( 1, 1, 2 ), tenemos que dichas pendientes coinciden y su valor es fx( 1, 1, 2
) = -2 y fy( 1, 1, 2 ) = -2. Si pensamos en dos planos perpendiculares al plano xy, uno
paralelo al eje x y otro paralelo al eje y, ambos conteniendo el punto ( 1, 1, 2 ), tendremos
que su intersección son dos parábolas conteniendo el punto ( 1, 1, 2 ) y las pendientes de
las tangentes a dichas parábolas en el punto considerado son los valores calculados de fx
,y fy . La siguiente gráfica nos ayuda a visualizarlo, vemos que ambas parábolas son
similares.
52
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Si quisiéramos encontrar la pendiente de la tangente a la superficie en cualquier otra
dirección, estaríamos preguntándonos por la derivada direccional de f( x, y ) en la
dirección de un vector unitario cualquiera que denotaríamos u = < cos( s ), sin( s ) >.
Esta derivada se suele denotar por Duf( x, y ) y es igual a
fx( x, y ) cos( s ) + fy( x, y ) sin( s ) = < fx( x, y ), fy( x, y ) > . < cos( s ), sin( s ) >.
El primer vector del producto vectorial anterior es < fx( x, y ), fy( x, y ) >, que llamamos
gradiente de la función f( x, y ). El gradiente es un vector en el plano xy que señala la
dirección de máximo crecimiento de la función, y su opuesta la de mínimo crecimiento.
Además es perpendicular a las curvas de nivel. Para comprobarlo vamos a dibujar el
gradiente en varios puntos pertenecientes a la curva de nivel de la curva f( x, y ) = x2 + y2
correspondiente a z =4.
CUADERNO DE PRÁCTICAS
53
Consideremos ahora la función f( x, y ) = x2 - y2, el punto de la gráfica ( -1, 1, 0 ), y la
dirección en el plano xy, < 2, 1 >. El plano , x - 2y = -3, contiene el punto ( -1, 1, 0 ) y es
paralelo a < 2, 1 >, la representación gráfica es:
54
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
En el punto ( -1, 1, 0 ) la derivada en la dirección < 2, 1 > es la pendiente de la línea
tangente a la curva de intersección.
Ejercicio 3: Comprobar que su valor -6/√5.
El gradiente es < 2x, -2y >, por tanto en el punto ( -1, 1, 0 ), el gradiente es < -2, -2 >.
Por tanto, ésta es la dirección de máximo crecimiento. La dirección de mínimo
crecimiento será su opuesta.
CUADERNO DE PRÁCTICAS
55
Ejercicio 4: Comprobar que el valor de la derivada en la dirección < -1, -1 > es de 2√2.
Ejercicio 5: Comprobar que el valor de la derivada en la dirección < 1, 1 > es de -2√2.
Sabemos pues, que el valor de la derivada direccional estará siempre comprendido entre
los valores -2√2 y 2√2 .
Por último, dibujaremos el gradiente en diversos puntos de la curva de nivel y = ± x,
resultante de hacer la intersección de la función con el plano xy. Observamos la
perpendicularidad de la que habíamos hablado.
56
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 6: La temperatura, en grados Celsius, sobre la superficie de una placa metálica
viene dada por
T ( x, y ) = 20 − 4 x 2 − y 2
midiéndose x, y en pulgadas. Desde el punto (1,2) determinar la dirección de crecimiento
máximo y mínimo de la temperatura. Determinar también a qué ritmo se produce dicho
crecimiento. Dibujar las curvas de nivel y el gradiente en diversos puntos de una de las
curvas de nivel.
CUADERNO DE PRÁCTICAS
57
PRÁCTICA CCV-3.
Integrales dobles.
1. ÁREAS EN EL PLANO
Ejercicio 1: Calcular el área comprendida entre las curvas y = x3 + 1, y = x2 + 3, cuando
x varía entre 0.2 y 0.8. Dibujar dicho recinto.
Si dibujamos ambas curvas el problema se convierte en muy sencillo
pues los límites de integración son fáciles de hallar. Así pues,
58
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 2: Calcular el área comprendida entre las curvas y=x , y=√x cuando x varía
entre x = 0.2 y x = 0.8.
De nuevo el ejercicio es fácil de realizar si conocemos la siguiente gráfica:
pues el problema se reduce a calcular la integral :
Ejercicio 3: Calcular las áreas de los ejercicios 39, 40 y 41 (pag. 1092) del libro de R.
Larson et al.. Dibujar las regiones que allí aparecen.
CUADERNO DE PRÁCTICAS
59
2. VOLÚMENES.
Ejercicio 4: Calcular el volumen bajo la función f( x, y ) = 8 - x2 - y comprendido en la
región, 0 ≤ x ≤ 2, 0 ≤ y ≤ 3,
Para ello representamos la función:
y por tanto el volumen es fácil de calcular a través de la integral :
60
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 4: Calcular el volumen bajo el plano x + y + z = 2 y los planos coordenados del
primer octante.
El volumen representado es un tetraedro con cuatro caras triangulares. La región del
plano xy sobre la que se va a realizar la integración es:
CUADERNO DE PRÁCTICAS
61
La recta que aparece tiene por ecuación y=2-x. Por tanto, el volumen viene dado por:
Ejercicio 5: Calcular los volúmenes de los ejercicios 29, 30 y 31 (pag. 1102) del libro de
R. Larson et al.. Dibujar las regiones que allí aparecen.
3. COORDENADAS POLARES.
Ejercicio 6: Dibujar la curva r= 3 sen(2 ϑ) dada en coordenadas polares.
62
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 7: Encontrar el área de los cuatro pétalos de la figura evaluando la integral
Ejercicio 8: Encontrar el volumen de la esfera unidad, x2 + y2 + z2 = 1. Para ello hallar el
volumen de un octante y multiplicarlo por 8. Realizarlo primero la integración en
coordenadas cartesianas y luego en polares. Reportar la diferencia de los tiempos de
cómputo de las integrales usando uno u otro tipo de coordenadas.
CUADERNO DE PRÁCTICAS
63
Ejercicio 9: Usar una integral doble para hallar el área encerrada por la gráfica de
r=3 cos (3 ϑ)
Dibujar la gráfica de la función.
Ejercicio 10: Usar condenadas polares para calcular el volumen de la región sólida
limitada por el hemisferio superior de una esfera de radio 4, e inferiormente por el área
comprendida en el círculo de radio 2 del plano xy. Dibujar dicha región.
64
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
CUADERNO DE PRÁCTICAS
65
PRÁCTICA CCV-4.
Integrales triples.
1. Integrales Triples. Coordenadas cilíndricas.
Ejercicio 1: Calcular el volumen limitado por las superficies z = x2 + y2 y z = 8 - x2 - y2
66
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Es decir, nos están pidiendo evaluar la integral:
que transformaremos en coordenadas cilíndricas obteniendo la integral
cuyo valor podéis verificar que es 16π.
Ejercicio 2: Hallar el volumen de la región sólida cortada por la esfera de radio 2 y el
cilindro r=2 sin(ϑ). Dibujar dicha región.
Ejercicio 3: Calcular los volúmenes de los ejercicios 4.34 y 4.42 (pag. 289) del libro de
J. de Burgos. Dibujar las regiones que allí aparecen.
2. Integrales Triples. Coordenadas esféricas.
Ejercicio 4: Hallar el volumen del sólido acotado por la esfera x2 + y2 + z2 = 9 y el cono
z = √( 3x2 + 3y2 ).
En primer lugar, dibujamos la superficie que limita al sólido que aparece a continuación.
CUADERNO DE PRÁCTICAS
y escribiendo la integral en coordenadas esféricas obtenemos:
67
68
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 5: Calcular los volúmenes de los ejercicios 4.17 y 4.19 (pag. 288) del libro de
J. de Burgos. Dibujar las regiones que allí aparecen.
CUADERNO DE PRÁCTICAS
69
PRÁCTICA CCV-5.
Campos vectoriales. Integrales de línea.
1. CAMPOS VECTORIALES.
La función definida por F( x, y ) = < M(x, y), N(x, y) > se llama campo vectorial sobre
una región del plano xy. La función definida por F( x, y, z ) = < M( x, y, z ), N( x, y, z ),
P( x, y, z ) > es un campo vectorial sobre un sólido definido en el espacio xyz. El
gradiente de f( x, y ) es un ejemplo de campo vectorial en el plano, Grad. f( x, y ) = < fx(
x, y ), fy( x, y ) > y Grad. f( x, y, z ) es un ejemplo de campo vectorial en el espacio. En la
siguiente figura dibujamos un campo vectorial en el plano, para ello dibujamos el
gradiente f( x, y ) = x2 + y2 en cada par de puntos del plano que tengan componentes
enteras.
70
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Sin embargo, es más usual dibujar vectores de igual longitud o módulo. Por ejemplo,
dado el campo vectorial F( x, y ) = < x, 3y >, dibujamos en primer lugar los vectores
cuya longitud sea 1, después aquellos de longitud 2, etc.. (Necesitamos para ello que
Mathematica resuelva una ecuación con la instrucción Solve[]). La siguiente figura está
hecha de este modo.
CUADERNO DE PRÁCTICAS
71
Las elipses que aparecen no son una casualidad, sino que el campo es conservativo, es
decir, es el gradiente de una función potencial, en este caso z = x2/2 + 3y2/2.
Ejercicio 1: Escribir un programa en Mathematica que indique si el campo F( x, y ) = <
x + y, x - y > es conservativo. En caso afirmativo hallar el potencial.
Si ejecutamos el programa
Mathematica nos devolverá “True”, lo que significa que el campo es conservativo, para
hallar el potencial basta tomar:
72
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 2: Dibujar el campo vectorial F( x, y ) = <2 x , y > . Averiguar si es
conservativo. En caso afirmativo hallar el potencial.
Ejercicio 3: Escribir un programa en Mathematica que indique si el campo F( x, y,z ) =
exp(z) < y, x , x y > es conservativo. En caso afirmativo hallar el potencial.
2. INTEGRALES DE LÍNEA.
Ejercicio 4: Calcular la integral de f( x, y ) = x + y por el camino y = Sqrt[x] desde ( 0,
0 ) hasta ( 1, 1 ) y regresar por el camino y = x2.
Para resolverlo dibujamos el camino, observando que debemos dividir la integral en dos
partes.
CUADERNO DE PRÁCTICAS
73
La primera parte va desde ( 0, 0 ) hasta ( 1, 1 ) por el camino dado por la raíz
cuadrada
dando como resultado numérico 1.5. La segunda
74
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
da el mismo resultado 1.5.
Ejercicio 5: Cual sería el resultado de la integral si el camino de integración se recorriese
al revés.
Ejercicio 6: : Calcular las integrales de línea 5, 8 y 9 (pág. 1196) del libro de R. Larson
et al.. Dibujar las regiones que allí aparecen.
Ejercicio 7: : Buscar ejemplos de integrales de línea que prueben que son independientes
de la parametrización de la curva C.
Ejercicio 8: : Buscar ejemplos de integrales de línea que prueben que si la orientación de
la curva C se invierte, cambia entonces el signo de la integral.
3. TRABAJO. INTEGRALES DE LINEA SOBRE UN CAMPO
VECTORIAL.
El trabajo realizado cuando movemos una partícula por un camino C a través de un
campo de fuerzas (campo vectorial ) viene dado por la expresión:
CUADERNO DE PRÁCTICAS
Ejercicio 9: Calcular el trabajo realizado por el campo
si la partícula recorre el camino
El programa solución sería el siguiente:
obteniendo que el trabajo realizado es 0. El campo es:
75
. Dibujar el campo.
76
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
En la notación que hemos venido usando en las clases de teoría el trabajo se denota por:
.
Ejercicio 10: Calcular el trabajo realizado por el campo < x, y, 2 > si una partícula se
mueve lo largo de la hélice r( t ) = < cos( t ), sin( t ), t >. Dibujar el campo.
CUADERNO DE PRÁCTICAS
El campo vectorial sería:
El programa en Mathematica sería :
77
78
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Ejercicio 12: : Calcular el trabajo realizado en los ejercicios 29 y 30 (pag. 1198) del
libro de R. Larson et al.. Dibujar las regiones que allí aparecen.
4. INDEPENDENCIA DEL CAMINO. CAMPOS
CONSERVATIVOS.
Supongamos que una partícula se mueve desde el punto ( 0, 0 ) al punto ( 1, 1 ) a
través de un campo de fuerzas f( x, y ) = < 2, y >.
Ejercicio 13: Comprobar que se trata de un campo conservativo.
Vamos a evaluar el trabajo a lo largo de la curva y = x2 con la parametrización r( t ) = {
t, t2 }.
CUADERNO DE PRÁCTICAS
El resultado es 2.5.
Evaluemos el mismo problema a lo largo del camino y = x.
El resultado vuelve a ser 2.5. Si tomamos como camino y = Sqrt[x]
79
80
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
obtenemos el mismo resultado 2.5.T Si ahora vamos por el eje y hasta el punto ( 0, 1 ) y
desde allí hasta el punto ( 1, 1 ) tenemos
CUADERNO DE PRÁCTICAS
81
el mismo resultado 2.5.
Ello se debe a que el campo es conservativo y existe un función potencial que se obtiene
fácilmente. El teorema fundamental de las integrales en línea hace el resto.
5. TEOREMA DE GREEN.
Ejercicio 14: Calcular la integral de línea de F( x, y ) = < xy, x > a lo largo de las
curvas y = 2x - 1 , y = 1.5x. Observar que F( x, y ) no es conservativo.
82
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
En el programa de la izquierda están hechos los cálculos resolviendo la integral de
línea y en el de la derecha usando el teorema de Green.
CUADERNO DE PRÁCTICAS
83
Ejercicio 14: : Resolver los ejercicios 9, 10 y 11 (pag. 1206) del libro de R. Larson et
al., utilizando el teorema de Green. Dibujar los campos y las regiones que allí aparecen.
84
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
CUADERNO DE PRÁCTICAS
85
APENDICE.
Programas utilizados.
1. Programa usado para la práctica de funciones vectoriales .
Needs%"Graphics`Arrow`"&
(
!
x%t&2 ' y%t&2 ' z%t&2
'' r!" t # '' "
!" #
! " #
v! t " r'! t " # x'%t&, y'%t&, z'%t& %
speed " '' !v!" t # '' " '' !r'!" t # ''
!
a!" t # " !v'!" t #
arclength "
$
b
r'!" t # '' & t
'' !
!
T'!" t #
!
, N!" t # "
!
!
'' r'!" t # ''
'' T'!" t # ''
!
!
!
!
!
a!" t # " ) !a!" t # ) T!" t #*!T!" t # ' ) !a!" t # ) N!" t #*! N!" t #
!
'' T'!" t # ''
Kappa "
r'!" t # ''
'' !
x%t_& :" Cos%t&
!
T!" t # "
!
r'!" t #
a
y%t_& :" Sin%t&
z%t_& :" t
r%t_& :" +x%t&, y%t&, z%t&,
t1 " Table%Graphics%+ RGBColor%1, 0, 1&, Arrow%+0, 0,, +y%t& $ x%t& - Sqrt%2&, z%t& $ x%t& - Sqrt%2&,&,&, +t, 0, 6!Pi, Pi- 12,&
Show%t1&
86
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
t2 "
Table%
Graphics%+ RGBColor%0, 0, 1&, Arrow%+y%t& $ x%t& - Sqrt%2&, z%t& $ x%t& - Sqrt%2&,,
+y%t& ' y'%t& $ "x%t& ' x'%t&# - Sqrt%2&, z%t& ' z'%t& $ "x%t& ' x'%t&# - Sqrt%2&,&,&, +t, 0, 6!Pi, Pi- 6,&
Show%t2&
Show%t1, t2&
t3 "
Table%
Graphics%+ RGBColor%0, 0, 1&, Arrow%+y%t& $ x%t& - Sqrt%2&, z%t& $ x%t& - Sqrt%2&,,
+y%t& ' y''%t& $ "x%t& ' x''%t&# - Sqrt%2&, z%t& ' z''%t& $ "x%t& ' x''%t&# - Sqrt%2&,&,&, +t, 0, 6!Pi, Pi- 6,&
Show%t1, t3&
2. Programas usados en las prácticas sobre derivadas direccionales y gradientes.
f[x_,y_]:=4 - x^2 - y^2
Needs["Graphics`Arrow`"]
p1 = Plot3D[f[x,y],{x,-2,2},{y,-2,2},Boxed->False,Axes->None,AspectRatio->Automatic]
b1 = Graphics[Arrow[{1-1/Sqrt[2],2-1/Sqrt[2]},{-2/Sqrt[2],-2/Sqrt[2]}]]
Show[p1,b1]
Arrow[{a,b,c},{d,e,f}] -> Arrow[{b-a/
a1 " Graphics.Arrow.+0, 0,, /$1 0
(
,c-a/
2, $1 0
(
2 122
},{e-d/
a2 " Graphics%Arrow%+0, 0,, +1, 0,&&
a3 " Graphics%Arrow%+0, 0,, +0, 1,&&
t1 " Graphics%Text%x, +$.5, $.6,&&
t2 " Graphics%Text%y, +1, $.1,&&
t3 " Graphics%Text%z, +$.1, 1,&&
s " Show%a1, a2, a3, t1, t2, t3, AspectRatio $% Automatic&
,f-d/
}]
CUADERNO DE PRÁCTICAS
87
Show[p1,s,b1,PlotRange->All]
f[x_,y_]:=4 - x^2 - y^2
p1
=
Plot3D[f[x,y],{x,-2,2},{y,-2,2},Boxed->False,Axes->None,AspectRatio>Automatic,ViewPoint->{2,2,2}]
p2 = ParametricPlot3D[{t,1,u},{t,-4,4},{u,-4,4}]
Show[p1,p2]
b1 = Graphics[Arrow[{1-1/Sqrt[2],2-1/Sqrt[2]},{1+1/Sqrt[2],2+1/Sqrt[2]}]]
b2 = Graphics[Arrow[{1-1/Sqrt[2],2-1/Sqrt[2]},{-1-1/Sqrt[2],2-1/Sqrt[2]}]]
l1 = Graphics3D[{AbsoluteThickness[2],Line[{{1,1,2},{-1,1,2}}]}]
l2 = Graphics3D[{AbsoluteThickness[2],Line[{{1,1,2},{1,-1,2}}]}]
Show[l1,l2,AxesLabel->{"x","y","z"}]
Show[p1,PlotRange->All,AspectRatio->Automatic]
f[x_,y_]:=4 - x^2 - y^2
p1
=
Plot3D[f[x,y],{x,-2,2},{y,-2,2},Boxed->False,Axes->None,AspectRatio>Automatic,ViewPoint->{3,3,3}]
p2 = ParametricPlot3D[{t,1,u},{t,-4,4},{u,-4,4},ViewPoint->{3,3,3}]
p3 = ParametricPlot3D[{1,t,u},{t,-4,4},{u,-4,4},ViewPoint->{3,3,3}]
Show[p1,p2,p3,PlotRange->All]
*
f[x_,y_]:=4 - x^2 - y^2
g[x_,y_]:=D[f[x,y],x]
h[x_,y_]:=D[f[x,y],y]
g[x,y]
D[f[x,y],x]
p1 = ParametricPlot[{2Sin[t],2Cos[t]},{t,0,2Pi},AspectRatio->Automatic]
Needs["Graphics`Arrow`"]
t1
=
Table[Graphics[{RGBColor[1,0,0],Arrow[{2Sin[t],2Cos[t]},{4Sin[t],4Cos[t]}]}],{t,0,
2Pi,Pi/8}]
88
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
Show[t1,p1,AspectRatio->Automatic]
f[x_,y_]:=x^2 - y^2
p2 = Plot3D[f[x,y],{x,-2,2},{y,-2,2},AspectRatio->Automatic,ViewPoint->{0,3,3}]
f[x_,y_]:=x^2 - y^2
p1
=
Plot3D[f[x,y],{x,-2,2},{y,-2,2},AspectRatio->Automatic,ViewPoint>{1,2,2},Boxed->False,Axes->None]
p2
=
ParametricPlot3D[{t,t+2,u},{t,-2,2},{u,-4,4},AspectRatio>Automatic,ViewPoint->{1,2,2},Boxed->False,Axes->None]
Show[p2,p1,PlotRange->All,Boxed->False]
p2
=
ParametricPlot3D[{2t-3,t,u},{t,-2,2},{u,-4,4},AspectRatio>Automatic,ViewPoint->{1,2,2},Boxed->False,Axes->None]
Show[p2,p1,PlotRange->All,Boxed->False]
p3 = Plot[{x,-x},{x,-2,2},AspectRatio->Automatic,Axes->None]
a1 = Table[Graphics[{RGBColor[1,0,0],Arrow[{i,i},{i+2,i-2}]}],{i,-2,2,0.6}]
a2 = Table[Graphics[{RGBColor[1,0,0],Arrow[{i,-i},{i+2,-i+2}]}],{i,-2,2,0.6}]
Show[p3,a1,a2,AspectRatio->Automatic]
3. Programas usados en integrales triples:
f%x_, y_& :" 8 $ x^2 $ y^2
g%x_, y_& :" x^2 ' y^2
p1 " Plot3D%f%x, y&, +x, $2, 2,, +y, $ 2, 2,&;
p2 " Plot3D%g%x, y&, +x, $2, 2,, +y, $ 2, 2,&;
Show% p1, p2, AspectRatio $% Automatic&
V " 4!$ $
2
0
(
0
4$x2
$
8$x2$y2
x2'y2
& z!& y!& x
CUADERNO DE PRÁCTICAS
V " 4!$
+
2
(
0
4!$ $
2
m"
0
0
4!$ $
2
Mxy "
! $ !$
2
0
8$r2
0
r2
4$x2
$
(
0
89
!r!z!& z!& r!& ,
8$x2$y2
z!& z!& y!& x
x2'y2
4$x2
$
8$x2$y2
x2'y2
z2!& z!& y!& x
l1 " Graphics3D% Line%++0, 0, 0,, +2, 0, 0,,&&;
l2 " Graphics3D% Line%++0, 0, 0,, +0, 2, 0,,&&;
l3 " Graphics3D% Line%++0, 0, 0,, +0, 0, 2,,&&;
p1 " Graphics3D%Point%+1, 2, 3,&&;
l4 " Graphics3D% Line%++0, 0, 0,, +1, 0, 0,,&&;
l5 " Graphics3D% Line%++1, 0, 0,, +1, 2, 0,,&&;
l6 " Graphics3D% Line%++1, 2, 0,, +1, 2, 3,,&&;
l7 " Graphics3D% Line%++0, 0, 0,, +1, 2, 3,,&&;
l8 " Graphics3D% Line%++0, 0, 0,, +1, 2, 0,,&&;
t1 " Graphics3D%Text%"x", +2, 0, .2,&&;
t2 " Graphics3D%Text%"y", +0, 2, .2,&&;
t3 " Graphics3D%Text%"z", +0, .2, 2,&&;
t4 " Graphics3D%Text%"P"-,,,.#", +1, 2.5, 3.2,&&;
t5 " Graphics3D%Text%"-", +0, .6, 1.6,&&;
t6 " Graphics3D%Text%",", +.3, .3, 0,&&;
t7 " Graphics3D%Text%".", +0, .1, .4,&&;
Show%l1, l2, l3, p1, l4, l5, l6, l7, l8, t1, t2, t3, t4, t5, t6, t7, Boxed $% False, ViewPoint $% +2, 2, 2,&
p1 " ParametricPlot3D./t, u,
p2 " ParametricPlot3D./t, u,
Show% p1, p2&
(
(
3!t2 ' 3!u2 1, +t, $2, 2,, +u, $ 2, 2,2
9 $ t2 $ u2 1, +t, $2, 2,, +u, $2, 2,2
90
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
4. Programas usados en las prácticas de campos vectoriales y trabajo.
Needs%"Graphics`Arrow`"&
t1 " Table%Graphics%+ RGBColor%0, 0, 1&, Arrow%+x, $2,, +x ' 2!x, $2' 2/ "$2#,&,&, +x, $2, 2,&;
t2 " Table%Graphics%+ RGBColor%0, 0, 1&, Arrow%+x, $1,, +x ' 2!x, $1' 2/ "$1#,&,&, +x, $2, 2,&;
t3 " Table%Graphics%+ RGBColor%0, 0, 1&, Arrow%+x, 0,, +x ' 2!x, 0 ' 2/ "0#,&,&, +x, $2, 2,&;
t4 " Table%Graphics%+ RGBColor%0, 0, 1&, Arrow%+x, 1,, +x ' 2!x, 1 ' 2/ "1#,&,&, +x, $2, 2,&;
t5 " Table%Graphics%+ RGBColor%0, 0, 1&, Arrow%+x, 2,, +x ' 2!x, 2 ' 2/ "2#,&,&, +x, $2, 2,&;
Show%t1, t2, t3, t4, t5, AspectRatio $% Automatic&
m%x_, y_& :" x
n%x_, y_& :" 3!y
f%x_, y_& :" + m%x, y&, n%x, y&,
mf%x_, y_& :"
mf%2, 1&
(
" m%x, y&#2 ' "n%x, y&#2
Solve% mf%x, y& "" 1, y&
t1 " Table.Graphics./ RGBColor%1, 0, 0&, Arrow./x,
t2 " Table.Graphics./ RGBColor%1, 0, 0&, Arrow./x,
$
(
(
Show%t1, t2&
Solve% mf%x, y& "" 2, y&
t3 " Table.Graphics./ RGBColor%0, 0, 1&, Arrow./x,
t4 " Table.Graphics./ RGBColor%0, 0, 1&, Arrow./x,
Show%t1, t2, t3, t4, AspectRatio $% Automatic&
$
(
4! 1$ x2
1 $ x2
1, /2!x,
3
3
(
(
(
$4! 1 $ x2
1$ x2
1, /2!x,
3
3
1212, +x, $1, 1, .1,2;
(
$4! 4 $ x2
4$ x2
1, /2!x,
3
3
(
4! 4$ x2
4 $ x2
1, /2!x,
3
3
1212, +x, $1, 1, .1,2;
1212, +x, $2, 2, .1,2;
1212, +x, $2, 2, .1,2;
CUADERNO DE PRÁCTICAS
91
m%x_, y_& :" x ' y
n%x_, y_& :" x $ y
f%x_, y_& :" + m%x, y&, n%x, y&,
(
mf%x_, y_& :" " m%x, y&#2 ' "n%x, y&#2
Solve% mf%x, y& "" 1, y&
t1 "
Table.
Graphics./ RGBColor%1, 0, 0&, Arrow./x, $
+x, $.7, .7, .1,2;
t2 "
Table.
Graphics./ RGBColor%1, 0, 0&, Arrow./x,
+x, $.7, .7, .1,2;
Show%t1, t2, AspectRatio $% Automatic&
0M
0N
"
0x
y
m%x_, y_& :" x ' y
n%x_, y_& :" x $ y
f%x_, y_& :" + m%x, y&, n%x, y&,
D% m%x, y&, y& """ D%n%x, y&, x&
0
$
m%x, y&!&x
$
n%x, y&!& y
potential%x_, y_& :" xy '
x2 y2
$
2 2
F%x_, y_, z_& :" # x, xy, 3!z %
curl F!"x, y, z# " # 0, 0, y %
div F!"x, y, z# " 1 ' x ' 3 " 4 ' x
(
(
1$ 2!x2
(
(
2
1 $ 2!x2
(
1, /x$
2
1, /x '
(
1 $ 2!x2
(
2
1 $ 2!x2
(
(
' x, $
2
(
' x, $
1$ 2!x2
(
2
1 $ 2!x2
(
(
' x'
2
(
' x'
1 $ 2!x2
(
1$ 2!x2
(
1212,
2
2
1212,
92
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
$
C
3 f!"xi, yi#!3s
f!" x, y #!& s " lim
n12
$
C
3 f!"xi, yi, zi#!3s
f!" x, y, z #!& s " lim
n12
n
i"i
n
'' r'!" t# ''
ds "
$
C
$
C
i"i
1
f!" x, y #!& s "
$
dt "
x ' y!& s
$
C
x ' y!& s
"x'!"t##2 ' "y'!"t##2
f!" x!" t #, y!" t # #
b
a
f!" x, y, z #!& s "
$
C
(
$
(
"x'!"t##2 ' "y'!"t##2 !& t
f!" x!" t #, y!" t #, z!" t # #
b
a
(
"x'!"t##2 ' "y'!"t##2 ' "z'!"t##2 !& t
(
f%x_& :" x
g%x_& :" x^2
p1 " Plot%+f%x&, g%x&,, +x, 0, 1,, AspectRatio $% Automatic, PlotStyle $% RGBColor%0, 0, 1&&
l " Graphics%++ RGBColor%0, 0, 1&, Line%++.25, .5,, +.15, .5,,&,,
+ RGBColor%0, 0, 1&, Line%++.25, .5,, +.25, .4,,&,,
+ RGBColor%0, 0, 1&, Line%++.5, .25,, +.5, .35,,&,,
+ RGBColor%0, 0, 1&, Line%++.5, .25,, +.6, .25,,&,,&;
Show% p1, l&
x%t_& :" t
(
y%t_& :" t
N. $
1
(
(
)t '
t *! "x'%t&#2 ' "y'%t&#2 !&t, 22
0
x%t_& :" 1$ t
y%t_& :" "1$ t#2
N. $
W "
1
(
) "1 $ t# ' "1 $ t#2*! "x'%t&#2 ' "y'%t&#2 !& t, 22
0
$
C
!
F
r"
) &!
$
C
! !
F) T!& s "
$
b!
a
F!"x!" t #, y!" t ## ) !r'!" t #!&t
!
!
!
CUADERNO DE PRÁCTICAS
93
F!"x, y# " # y, x % " y!i ' x!j
!
r!" t # " # cos!" t #, sin!" t # %
p1 " ParametricPlot%+Cos%t&, Sin%t&,, +t, 0, 2!+,, AspectRatio $% Automatic, PlotStyle $% RGBColor%1, 0, 0&&
t " Table%Graphics%+ RGBColor%0, 1, 0&, Arrow%+Cos%i&, Sin%i&,, +Cos%i& ' Sin%i&, Sin%i& ' Cos%i&,&,&,
+i, 0, 2!+, + - 12,&
Show% p1, t, AspectRatio $% Automatic&
Clear%d, f, r, t, u, v, x&
f " +Sin%t&, Cos%t&,
r " +Cos%t&, Sin%t&,
d " D%r, t&
dotproduct " Dot%f, d&
$
2!+
dotproduct!& t
0
W"
W"
$
C
$
M!&x ' Ndyor W "
$
C
M!&x ' Ndy ' Pdz
2!+
" Cos%t& / "$Sin%t&# '
1/ Cos%t& # &t
!
F
!" x, y, z # " # x, y, 2 %
C: r!" t # " # cos!" t #, sin!" t #, t %
0
t"
Table.
Graphics./ RGBColor%0, 1, 0&, Arrow./Sin%t& $ Cos%t& 0
/2!Sin%t& $ 2!Cos%t& 0
Show%t&
(
2, t' 2 $ 2!Cos%t& 0
Clear%f, r, d, t&
f " +Cos%t&, Sin%t&, 2,
r " +Cos%t&, Sin%t&, t,
d " D%r, t&
dotproduct " Dot%f, d&
work "
$
4!+
dotproduct!& t " 8!+
0
(
(
2, t $ Cos%t& 0
(
2 1,
2 1212, +t, 0, 4!+, + - 12,2;
94
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
5. Programas usados en la práctica del teorema de Green:
Needs%"Graphics`Arrow`"&
m%x_, y_& :" 2
n%x_, y_& :" y
0n
0m
"
0x
0y
cx1%t_& :" t
cy1%t_& :" t^2
p1 " ParametricPlot%+cx1%t&, cy1%t&,, +t, 0, 1,, AspectRatio $% Automatic&
p1 " ParametricPlot./t, t21, +t, 0, 1,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&2
t " Table.Graphics./ RGBColor%0, 1, 0&, Arrow./i, i21, /i ' 2, i2 ' i21212,
+i, 0, 1, .1,2
Show% p1, t, AspectRatio $% Automatic, PlotRange $% All&
Clear%t&
f%t_& :" /2, t21
r%t_& :" /t, t21
work "
$
Dot%f%t&, r'%t&&!&t
1
0
Clear% p, t&
p1 " ParametricPlot%+t, t,, +t, 0, 1,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&&
t " Table%Graphics%+ RGBColor%0, 1, 0&, Arrow%+i, i,, +i ' 2, i ' i,&,&,
+i, 0, 1, .1,&
Show% p1, t, AspectRatio $% Automatic, PlotRange $% All&
Clear%t&
f%t_& :" +2, t,
r%t_& :" +t, t,
work "
$
Dot%f%t&, r'%t&&!&t
1
0
CUADERNO DE PRÁCTICAS
95
Clear% p, t&
(
x
(
p1 " ParametricPlot./t, t 1, +t, 0, 1,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&2
(
t " Table.Graphics./ RGBColor%0, 1, 0&, Arrow./i, i 1, /i ' 2,
+i, 0, 1, .1,2
Show% p1, t, AspectRatio $% Automatic, PlotRange $% All&
(
i'
(
i 1212,
Clear%t&
f%t_& :" /2, ( t 1
r%t_& :" /t, ( t 1
work "
$
Dot%f%t&, r'%t&&!&t
1
0
Clear% p, t&
p1 " ParametricPlot%+0, 2!t,, +t, 0, .5,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&&
p2 " ParametricPlot%+2!t$ 1, 1,, +t, .5, 1,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&&
t1 " Table%Graphics%+ RGBColor%0, 1, 0&, Arrow%+0, 2!i,, +0 ' 2, 2!i ' 2!i,&,&,
+i, 0, .5, .1,&
t2 " Table%Graphics%+ RGBColor%0, 1, 0&, Arrow%+2!i $ 1, 1,, +2!i $ 1 ' 2, 1' 1,&,&,
+i, .5, 1, .1,&
Show% p1, p2, t1, t2, AspectRatio $% Automatic, PlotRange $% All&
Clear%t&
f%t_& :" +2, 2!t,
r%t_& :" +0, 2!t,
work1 "
$
Dot%f%t&, r'%t&&!&t
.5
0
Clear%t&
f%t_& :" +2, 1,
r%t_& :" +2!t$ 1, 1,
work2 "
$
Dot%f%t&, r'%t&&!& t
1
.5
work " work1' work2
96
PROYECTO DOCENTE: Dr. Jesús Vigo-Aguiar
potential1%x_, y_& :" $ 2!&x
potential2%x_, y_& :" $ y!&y
potential1%x, y&
potential2%x, y&
$
C
Mdx ' Ndy "
$ $
40
50
N 0 M6
$
!&A
x 0 y7
c1%x_& :" 2x $ 1
c2%x_& :" 1.5!x
Plot%+c1%x&, c2%x&,, +x, 0, 2,, AspectRatio $% Automatic, AxesOrigin $% +0, 0,,
PlotRange $% ++0, 2,, +0, 3,,, PlotStyle $% RGBColor%1, 0, 0&&
Clear% p, t&
p1 " ParametricPlot%+t, 2t $ 1,, +t, 0, 2,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&&
p2 " ParametricPlot%+t, 1.5!t,, +t, 0, 2,, AspectRatio $% Automatic,
PlotStyle $% RGBColor%1, 0, 0&&
t1 "
Table.
Graphics./ RGBColor%0, 1, 0&, Arrow./i, 2i $ 11, /i' i/ )2i $ 1*, )2i $ 1* ' i1212,
+i, 0, 2, .2,2
t2 "
Table%Graphics%+ RGBColor%0, 1, 0&, Arrow%+i, 1.5!i,, +i ' i/ 1.5/ i, 1.5!i ' i,&,&,
+i, 0, 2, .2,&
Show% p1, p2, t1, t2, AspectRatio $% Automatic, PlotRange $% All&
CUADERNO DE PRÁCTICAS
Clear%t&
f%t_& :" +t/ "2t $ 1#, t,
r%t_& :" +t, 2t $ 1,
work1 " N.$ Dot%f%t&, r'%t&&!& t, 42
2
Clear%t&
f%t_& :" +t/ "1.5/ t#, t,
r%t_& :" +t, 1.5!t,
0
work2 " N.$ Dot%f%t&, r'%t&&!& t, 42
0
2
work " work1' work2
m%x_, y_& :" x/ y
n%x_, y_& :" x
N.$
2 1.5!x
"1$ x#!& y!& x, 42
$
0 2x$1
97