Control de Velocidad Proporcional–Integral (PI) con Acción
Anuncio
 con Acción")
IE
EN IN V 2008
Encuentro de Investigación en Ingenierı́a Eléctrica
Zacatecas, Zac, Marzo 13—14, 2008
Control de Velocidad Proporcional–Integral
(PI) con Acción Antiwindup para Motores
de CD
Javier Moreno–Valenzuela y Ernesto Orozco–Manrı́quez
Centro de Investigación y Desarrollo de Tecnologı́a Digital,
Av. del Parque No. 131O, Mesa de Otay, Tijuana, Baja California, México. C.P. 22510
TEL: +(664)6231344, FAX: +(664)6231388
correo-e: moreno@citedi.mx
Resumen — El presente trabajo aborda el
control de velocidad de motores de corriente directa (CD) bajo la hipótesis de que
sólo una cantidad finita de voltaje puede
ser aplicada. Se presentan dos algoritmos
ya propuestos en la literatura para resolver
este problema. En forma adicional, experimentos de tiempo real en un motor de CD
fueron llevados a cabo con el fin de evaluar
los esquemas de control.
Abstract— This document deals with the
velocity control of direct current (DC) motors under the assumption that only limited voltage can be applied. In order to
solve that problem, two algorithms, already proposed in the literature, are presented. Real–time experiments in a DC
motor were carried out with the aim of
evaluating the performance of the control
schemes.
Descriptores — Control de velocidad, Motor de corriente directa (CD), Saturación
de voltaje, Antiwindup.
I. INTRODUCCIÓN
T
ODOS los actuadores están sujetos a la
saturación, ya que sólo pueden entregar
cierta cantidad de fuerza, velocidad, etc. Un
actuador sólo puede trabajar entre un lı́mite
inferior y un lı́mite superior [1]. En la industria, estas limitaciones son manejadas de tal
manera que se opta por el rediseño de los
componentes del sistema, tal que, durante la
presencia de saturación, u otras limitaciones,
no se presente un mal desempeño. Esto puede
hacerse seleccionando un actuador más potente que evite la saturación para el sistema
en especı́fico, sin embargo, es altamente ineficiente y puede llevar al incremento en los
costos del sistema [4].
Cuando la variable de control alcanza los
lı́mites del actuador no causa ningún problema cuando el lazo está cerrado. Sin embargo,
el lazo de retroalimentación se rompe cuando
el actuador se satura debido a que la salida
del actuador en saturación no es influenciada
por su entrada. Este estado inestable del contralador puede causar que se lleve a valores
muy altos. Para que el actuador deje de estar
en saturación puede llevar un largo tiempo en
que el sistema se recupere. Además de ésto, el
actuador oscila varias veces entre sus lı́mites
Moreno–Valenzuela y Orozco–Manrı́quez: Control de Velocidad Proporcional–Integral (PI)
de saturación antes de que el sistema se recupere. Lo anterior es conocido comunmente
como efecto de “windup” [4]
El presente trabajo tiene un fundamento
didáctico. En particular, éste tiene los siguientes propósitos:
Ilustrar el problema control de velocidad considerando que la acción de control está limitada. Para ello, se presentan
dos esquemas de control ya propuestos
en la literatura. Mas especifı́camente, se
trata del control PI en cascada con una
función de saturación, y del control PI
equipado con un algortimo antiwindup.
Con el fin de mostrar las prestaciones de
los método estudiados, se presentan resultados experimentales de tiempo real
en un motor de CD Pittman 9236S009
[5].
La organización del documento es la siguiente: La Sección II presenta el modelo de motores de CD y el planteamiento del problema
de control de velocidad. El control PI de velocidad es descrito en la Sección III, mientras
que el control PI de velocidad equipado con
el método de antiwindup de cálculo regresivo es mostrado en la Sección IV. El sistema
experimental es descrito en la Sección V. La
Sección VI concierne a los resultados de las
implementaciones en tiempo real de los controladores. Finalmente, los comentarios concluyentes son dados en la Sección VII.
II. MODELO DEL MOTOR Y OBJETIVO
DE CONTROL
Una descripción lineal de un motor de corriente directa (CD), considerando al voltaje
como una entrada está dada por [2],
JM q̈ +
Ka
Ka Kb
q̇ +fv q̇ +fc sign(q̇) =
u, (1)
Ra
Ra
23
donde JM > 0 es la inercia del motor, q̇ es la
velocidad del motor, Ka > 0 es la constante motor-par, Kb es la constante de contrarreacción electromotriz, Ra es la resistencia de
la armadura, fv es el coeficiente de fricción
viscosa y fc es el coeficiente de fricción de
Coulomb. La función sign(x) se define como:
sign(x) =
1,
x > 0,
0, x = 0,
-1, x < 0.
Defı́nase el conjunto
V = {u ∈ IR : umin ≤ u ≤ umax },
con umin < 0 la entrada mı́nima de voltaje
y umax > 0 la entrada máxima de voltaje.
El problema de control de velocidad consiste
en diseñar una entrada de control de voltaje
u ∈ V, tal que el error de velocidad
ė(t) = q̇d − q̇(t),
(2)
donde q̇d es una constante que especifica la
velocidad deseada y q̇(t) la velocidad del rotor, satisfaga el lı́mite
lı́m ė(t) = lı́m [q̇d − q̇(t)] = 0.
t→∞
t→∞
(3)
III. CONTROL PI DE VELOCIDAD
Un controlador propocional–integral (PI) de
velocidad está descrito por [3]:
u = kp ė + ki
Z
t
ė(t)dt
(4)
0
donde kp > 0 es la ganacia proporcional y
ki > 0 es la ganancia integral del controlador. Es conveniente notar que el controlador (4) no garantiza que el voltaje aplicado
permanecerá en el espacio admisible V. Sin
embargo, en la prática, éste debe de saturarse, ya que, si el voltaje calculado por el
controlador sobrepasa los lı́mites admisibles,
IE
EN IN V 2008
24
pueden aparecer efectos no lineales, como saturación magnética, y sobrecalentamiento, lo
que conduce a cambios en los valores de los
parametros del motor. De aquı́ que la acción
de control efectiva aplicado al motor de CD
está dada por
umax ,
umax ≤ u,
umin ≤ u ≤ umax ,
umin ,
u ≤ umin .
(5)
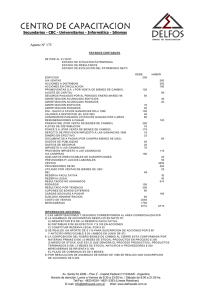
Nótese que û ∈ V. Un diagrama a bloques
del controlador PI de velocidad (4) aplicado
a un motor de CD, se muestra en la figura 1.
û = sat(u) =
Encuentro de Investigación en IE, 13–14 Marzo, 2008
La ecuación de este controlador es [1]:
u = kp ė + ki
Z
0
t
ė(t)dt − kAW
Z
t
es (t)dt (6)
0
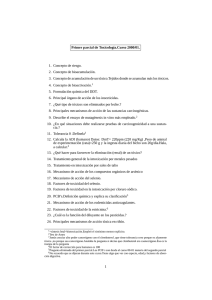
con kAW > 0, donde es = u−û y û definida en
(5). Un diagrama a bloques del controlador
(6) es presentado en la figura 2.
u,
Figura 2. Diagrama de bloques del control PI de
velocidad con acción antiwindup de cálculo
regresivo.
Figura 1. Diagrama de bloques del control PI de
velocidad.
IV. CONTROL PI DE VELOCIDAD CON
ACCIÓN ANTIWINDUP DE
CÁLCULO REGRESIVO
El método de antiwindup clásico, o antiwindup de cálculo regresivo, consiste en agregar al controlador PI un término adicional
con el fin de evitar que la acción de control efectiva û se sature y, al mismo tiempo, mejorar la respuesta temporal del sistema. Fue primeramente descrito por Fertik
y Ross en 1967, ver referencia [4]. En este
método, cuando la acción de control efectiva
û está en saturación, la parte integral es recalculada a fin de que su nuevo valor dé un
valor dentro de los lı́mites adimisibles de control. Para ésto, el sistema tiene un lazo de
retroalimentación extra, que es generado por
la diferencia de la señal de control u y la acción de control efectiva û, es decir, es = u− û,
La señal de error es es alimentada a la señal
de control u integrándola y multiplicándola
por ganancia ajustable kAW .
Figura 3. Motor de CD Pittman 9236S009
V. SISTEMA EXPERIMENTAL
En el Laboratorio de Sistemas Pasivos del
CITEDI–IPN cuenta con un motor de CD
Pittman 9236S009 montado sobre una base
de aluminio, como se muestra en la figura 3.
Para realizar experimentos en tiempo real, el
motor de CD es operado a través de una computadora personal, un servo amplificador Advanced Motion Controls modelo 16A20AC, y
Moreno–Valenzuela y Orozco–Manrı́quez: Control de Velocidad Proporcional–Integral (PI)
Los algoritmos de control son implementados
con una cadencia de muestreo de 1kHz sobre
el sistema operativo Windows XP, Matlab,
Simulink y Real–Time Windows Target.
Cabe mencionar que la información de velocidad es obtenida a través del codificador
óptico de cuadratura del motor utilizando el
algoritmo de difenciación numérica de Euler,
es decir,
q̇(kT ) =
El efecto windup que provoca en el control
de velocidad PI puede ser observado en las
figuras 5, que muestra la velocidad del motor
q̇(t), y en la figura 6, la cual describe la acción
de control saturada û(t).
400
350
300
Velocidad [rad/s]
una tarjeta de adquisición de datos Sensoray
626, con la cual se leen las señales del codificador óptico de cuadratura del motor y se
transfieren las señales de control al servo amplificador. La figura 4 muestra un diagrama
de bloques del sistema experimental.
25
250
200
150
100
50
0
0
0.5
1
1.5
Tiempo [segundos]
2
2.5
Figura 5. Control PI: velocidad del motor q̇(t).
q(kT ) − q([k − 1]T )
,
T
5
Voltaje
donde k = 1, 2, 3, etc., es el tiempo discreto
y T = 0,001 [s] es el periodo de muestreo.
umax
0
umin
−5
Figura 4. Diagrama de bloques del sistema
experimental.
0
A. Control PI
El primer experimento consiste en implementar el controlador PI en la ecuación (4) usando la velocidad deseada q̇d = 200 [radianes/segundo] y las ganancias
(7)
Los lı́mites de saturación fueron seleccionados como
umax =
5 [Volts],
umin = −5 [Volts].
1
1.5
Tiempo [segundos]
2
2.5
Figura 6. Control PI: acción de control saturada
û(t).
VI. RESULTADOS
kp = 0,218 [Volts s/rad],
ki = 13,1 [Volts/rad].
0.5
(8)
El efecto windup consiste en que el tiempo
de estabilización de la velocidad q̇(t) es relativamente largo. Si no existiera la saturación
de voltaje, este tiempo de estabilización serı́a
mucho más corto. Particularmente, se observa que la velocidad q̇(t) oscila bruscamente
entre valores altos y bajos en relación al valor
deseado. En forma similar, la acción de control efectiva û(t) oscila en ambos lı́mites de
saturación hasta que finalmente adquiere valores admisibles. Como observación, el efecto
windup depende del valor de la ganacia in-
IE
EN IN V 2008
26
tegral ki , ya que para valores muy pequeños,
no llega a presentarse.
Encuentro de Investigación en IE, 13–14 Marzo, 2008
Referencias
[1]
K. Astrom y T. Hagglund. PID Controllers: Theory, Design, and Tuning. 2da. Ed. ISA-The Instrumentation, Systems, and Automation Society. USA(1995).
R. Kelly y V Santibáñez. Control de Movimiento de Robots Manipuladores. Pearson Educación,
S.A. Madrid(2003).
K. Ogata. Ingenierı́a de Control Moderna. Pearson Educación, S.A. Madrid(2003).
M. Bak. “Control of Systems with Contraints”
Tesis Doctoral, Technical University of Denmark, 2000.
PITTMAN LOCG 14000 series; 2007.
<http://www.clickautomation.com/products/
index.php?func=list&cid=143>
B. Control PI mas antiwindup
[2]
kAW = 6550,2 [1/s].
Cabe mecionar que, aunque el valor numérico
de kAW es relativamente alto, éste fue seleccionado por prueba y error hasta que la mejor
prestación del controlador (6) fue obtenida.
Los lı́mites de saturación fueron los mismos
que se usaron para implementar el control PI
en (4), y su valor numérico está dado en (8).
Los resultados son mostrados en la figura 7,
que describe la evolución temporal de la velocidad q̇(t), y en la figura 8, que muestra la
acción de control efectiva û(t).
[3]
[4]
[5]
400
350
300
Velocidad [rad/s]
Este experimento se realizó usando q̇d = 200
[radianes/segundo], las ganancias kp , ki en
(7) y
250
200
150
100
50
0
0
0.5
1
1.5
Tiempo [segundos]
2
2.5
Figura 7. Control PI mas antiwindup: velocidad del
motor q̇(t).
5
Voltaje
Comparando los resultados de usar el control
PI con acción antiwindup en la ecuación (6),
y que son ilustrados en las figuras 7 y 8, con
respecto al uso del control PI en (4), cuya
evaluación es descrita en las figuras 5 y 6, se
puede observar una clara mejorı́a en el tiempo de asentamiento de la velocidad del motor
q̇(t), ya que es mucho mas corto. Además, la
acción de control efectiva û(t) no permanece
saturada por mucho tiempo.
umax
0
VII. CONCLUSIONES
umin
El presente trabajo ha sido realizado con
un enfoque más didáctico que de novedad
cientı́fica. Usando dos controladores ya propuestos en la literatura, se ha ilustrado el efecto windup en el control PI de velocidad de
motores de CD, y la forma de compensarlo.
Experimentos de tiempo real fueron cruciales
para tales fines.
−5
0
0.5
1
1.5
Tiempo [segundos]
2
2.5
Figura 8. Control PI mas antiwindup: acción de
control saturada û(t).


![En 1994, A. Neubauer ([4]) demostró que ciertos métodos de](http://s2.studylib.es/store/data/004819449_1-608ce7a4086f98639e6156efcae87bfd-300x300.png)