Controlador PID para Nivel de Tanque de la Unidad Didáctica
Anuncio

> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
1
Controlador PID para Nivel de Tanque de la
Unidad Didáctica RT614 Gunt Hamburg
Gerson Fabian Uribe Ramón COD: 1090544, Erney Fabian Castro Becerra COD: 1090533 &Ernesto
Osorio Estupiñán COD: 1090182
FACULTAD DE INGENERIA, INGENIERIA ELECTROMECÁNICA
UNIVERSIDAD FRANCISCO DE PAULA SANTANDER
Resumen—El control de nivel de tanques son procesos utilizados
en aplicaciones industriales (subestaciones de almacenamiento y
distribución del acueducto, procesos químicos, entre otros) y
residenciales (llenado del tanque del sanitario, del tanque aéreo
de almacenamiento, entre otros), los cuales son operados de
forma manual o automática. En las grandes industrias o en los
procesos donde se requiere precisión, el control y la
automatización del proceso es la herramienta más eficiente a la
hora de comparar los resultados. Este trabajo experimental
desarrollado en el laboratorio especializado LE-101, de la UFPS,
es el proyecto para la asignatura Control Automático, en el cual
se caracteriza el sensor de nivel, la electroválvula y el tanque,
posteriormente se analiza el sistema sin controlador, y finalmente
se diseña, construye e implementa un control PID utilizando la
herramienta rltool de Matlab. La finalidad del proyecto consiste
en analizar el sistema sin y con controlador, encontrar el mejor
diseño e implementarlo.
Palabras Claves:—Caracterización de sensores, ident, rltool,
Controlador PID, controlador de nivel.
I. INTRODUCTION
E
N teoría se conoce que la forma rápida, eficiente e
instantánea de hacer control a un proceso, es a través del
control automático. En los procesos donde se requiere
mantener constante el nivel de tanques, bien sea para asegurar
mezclas perfectas, evitar daños en la etapa de succión de
motobombas, evitar reboses de tanques, o simplemente
asegurar flujos constantes a la salida del tanque, se recurre al
monitoreo del nivel del tanque para controlar el flujo de
entrada o de salida al tanque, asegurando de esta forma, que el
nivel permanezca siempre en un valor deseado. Este trabajo
inicia con la identificación del sistema (véase figura 1, 2 y 3),
una vez identificado el proceso y el funcionamiento de la
unidad didáctica RT614 Gunt Hamburg (véase figura 1 y 2), se
Gerson Fabian Uribe Ramon. Estudiante de VII semestre de Ingeniería
Electromecánica, de la Universidad Francisco de Paula Santander, Cúcuta,
Norte de Santander, COLOMBIA (para sugerencias e indicaciones teléfono
móvil 3204074729; e-mail: furibe_007@hotmail.com).
Erney Fabian Castro Becerra. Estudiante de VII semestre de Ingeniería
Electromecánica, de la Universidad Francisco de Paula Santander, Cúcuta,
Norte de Santander, COLOMBIA (para sugerencias e indicaciones teléfono
móvil 3215845491; e-mail: erneyfabian@hotmail.com).
Ernesto Osorio Estupiñán. Estudiante de IX semestre de Ingeniería
Electromecánica, de la Universidad Francisco de Paula Santander, Cúcuta,
Norte de Santander, COLOMBIA (para sugerencias e indicaciones teléfono
móvil 313-2132336; teléfono fijo 5717885; e-mail: ekant1981@hotmail.com).
procede a caracterizar la electroválvula, sensor y tanque. Para
el desarrollo de este proyecto, se debe tener en cuenta que: el
control del flujo que llega al tanque se hace variando la
apertura de la electroválvula, lo que indica que la motobomba
siempre estará funcionando al 100%, y la válvula de drenaje
ubicada a la descarga del tanque se encuentra cerrada al 70% o
abierta al 30%. La electroválvula se caracterizó relacionando
(voltaje a la entrada vs flujo a la salida en mt3/seg), el sensor
se hizo comparando (la altura del tanque en mt vs voltaje de
salida del sensor), y el tanque hallando la resistencia
hidráulica, y su capacitancia para después reemplazarla en la
(Ecu 5). Después de haber caracterizado la electroválvula y el
sensor de nivel, se utiliza la herramienta ident de Matlab para
obtener las respectivas funciones de transferencia. Obtenida
cada una de las funciones de transferencia, se evalúa el sistema
en malla abierta y en malla cerrada “sin controlador”, para
observar su comportamiento, y poder así, escoger la mejor
estrategia para el diseño del controlador. Después de lo
anterior, se usa la herramienta rltool de Matlab, para diseñar y
determinar el controlador más eficiente, entre el PI y PID, una
vez hecha la comparación se toma el más eficiente que cumpla
las siguientes consideraciones (overshoot menor al 20%,
tiempo de subida y asentamiento menor al obtenido sin
controlador). Después de obtenido el controlador y su función
de transferencia se construye el e implementa a través de
amplificadores operacionales el controlador, el cual es monta
en protoboard, y finalmente se diseña la etapa de potencia que
accionara la electroválvula. Después de tener el circuito
montado se realizan las pruebas pertinentes utilizando la
unidad didáctica RT614, evaluándose la eficiencia del diseño.
II. OBJETIVOS
1. Analizar, diseñar, simular circuitos para implementar PID
análogos con amplificadores operacionales.
2. Explorar a un elevado nivel los programas para el diseño de
sistemas de control asistido por computador (MATLAB).
3. Ampliar y consolidar de una manera práctica los
conocimientos adquiridos en la más reciente clase del curso de
comunicaciones industriales. Para ello se utilizara el método
PBL (“Proyec based learneig” aprendizaje basado en
proyectos) que consistirá en el desarrollo de un prototipo a
partir de unas especificaciones iniciales.
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
III. MATERIALES Y COMPONENTES NECESARIOS
Para el desarrollo de este proyecto se utilizó la unidad de
demostración de control de nivel RT 614 Gunt Hamburg
(véase figura 1), la herramienta computacional Matlab 2010,
libros sobre control y controladores PID analógicos. Para la
tabulación de datos se utilizó el sistema métrico decimal.
2
La finalidad de este ítem consiste en obtener cada una de las
funciones de transferencia de los subsistemas de la figura 3,
utilizando el comando ident de Matlab, ya que cada subsistema
será tomado bajo el concepto de “caja negra”. La motobomba
no será tenida en cuenta en el proceso de caracterización
debido a que siempre estará funcionando al 100% máxima
posición, o sea no hay control sobre su accionamiento.
Fig. 3. Diagrama de bloques del sistema de control.
Primeramente hacer la caracterización de la motobomba,
seguidamente la del sensor de nivel, y finalmente la del tanque
o planta, para luego continuar con su respectivo
modelamiento.
Fig. 1. Unidad de demostración de control de nivel RT 614 Gunt Hamburg.
Fuente [1].
IV. MODELAMIENTO
El modelamiento del proceso completo, consiste en la
caracterización de los subsistemas y la obtención de sus
respectivas función de transferencia, para luego obtener la
función de transferencia en malla cerrada. En (véase figura 2 y
3), se aprecian el diagrama esquemático del proceso completo
del controlador de nivel y el diagrama de bloques del sistema
de control donde se incluyen los subsistemas.
A. Caracterización de los subsistemas: electroválvula,
sensor y tanque
Electroválvula: Para este caso (véase tabla I), se relacionaron
las variables, (voltaje a la entrada bomba vs cauda la salida),
lo que consistía en variar el voltaje a la entrada y medir el
caudal a la salida de la electroválvula “estando funcionando la
motobomba al 100%”, lo que indica que la electroválvula
controla el fulo de salida de la motobomba. La caracterización
se inicia con un voltaje de 1V hasta 10V aumentándolo cada
0,5V. Como no se tenía un flujometro o un caudalimetro para
realizar la medida a la salida de la electroválvula, se utilizaron
dos improvisados volúmenes de control un volumen V1=
0,524L= 524E-6
y otro V2= 1,44L= 1,44E-3
, los
cuales fueron medidos en el Laboratorio de Química de la
Universidad. El proceso consistía en ir variando el voltaje a la
entrada de la electroválvula y su vez registrar el tiempo que
tardaba en llenar el volumen de control, por cada voltaje a la
entrada se registran cuatro tiempos de llenado del volumen de
control, las cuales serán promediadas con el fin de buscar una
medida de tiempo más precisa.
Vent
(V)
Fig. 2. Diagrama esquemático de la unidad de demostración de control de
nivel RT 614 Gunt Hamburg. El cual está conformado por: un tanque de
abastecimiento, una motobomba hidráulica de accionamiento eléctrico, una
electroválvula de accionamiento eléctrico, un controlador e indicador de nivel
“LIC”, y un tanque de almacenamiento con indicador de nivel y un transmisor
de nivel “LT”. Fuente [2].
0,99
1,5149
2,0066
2,4995
2,9926
3,4869
4,076
4,571
5,001
5,496
5,993
6,489
7,087
7,490
7,989
8,522
9,022
TABLA I
CARACTERIZACIÓN DE LA ELECTROVÁLVULA
t1
t2
t3
t4
tprom
Q (V/tprom)
(seg)
(seg)
(seg)
(seg)
(seg)
(
48,05
24,03
17,53
12,26
9,81
22,16
17,48
15,12
13,51
12,10
10,87
9,90
9,02
8,21
7,54
6,99
6,57
46,50
23,93
17,86
13,51
9,82
21,85
17,29
15,27
14,20
12,45
11,21
9,19
8,47
7,64
7,14
6,84
24,04
17,79
12,87
9,67
21,63
17,23
15,0
13,52
11,61
10,70
9,80
8,60
8,05
6,95
6,53
17,79
13,00
9,80
21,76
17,35
15,42
13,79
12,15
11,09
9,96
9,16
7,58
7,44
6,92
47,50
24,00
17,7425
12,9100
9,77500
21,8500
17,3375
15,2025
13,7550
12,0775
10,9675
9,8867
8,9925
8,2433
7,5867
7,1300
6,7150
11,031579e-6
21,833333e-6
29,533606e-6
40,588690e-6
53,606138e-6
65,903890e-6
83,056957e-6
94,721263e-6
104,689204e-6
119,229973e-6
131,297014e-6
145,650217e-6
160,133445e-6
174,687322e-6
189,805844e-6
201,963534e-6
214,445272e-6
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
9,522
6,24
6,61
6,24
6,61
6,4250
224,124514e-6
10,022 6,01
5,79
5,94
5,9133
243,518847e-6
Los datos fueron registrados el día miércoles 9 de abril de 2014. Nota los
primeros cinco caudales se midieron con el volumen V1 y los restantes con el
volumen V2. Fuente autores.
Sensor de nivel: para este caso (véase tabla II), las variables
relacionadas son (altura “h” en centímetros del nivel del
tanque vs el voltaje del sensor de nivel), el registro empírico se
obtuvo posicionando el nivel del agua a una altura
debidamente tabulada y registrar el voltaje generado por el
sensor de nivel, iniciando en una altura h de 4,5cm hasta 49cm
el cual se aumentaba cada 5cm. Para este caso de
caracterización es tenida en cuenta su curva de histéresis, la
cual se obtiene según [3 y 4] haciendo un barrido de lecturas
subiendo, y otro bajando a la entrada del sensor, o sea al nivel
del tanque. En la tabla II se parecían los 168 datos registros
para obtener dicha curva.
TABLA II
CARACTERIZACIÓN DEL SENSOR DE NIVEL
Calibración subiendo
Calibración bajando
Nivel h (mts)
Voltaje (V)
Nivel h (mts)
Voltaje (V)
0,045
0,6662
0,05
0,6910
0,485
4,995
0,055
0,7469
0,48
4,921
0,06
0,7965
0,475
4,874
0,065
0,8446
0,47
4,821
0,070
0,9016
0,465
4,768
0,075
0,9514
0,46
4,712
0,08
1,0054
0,455
4,675
0,085
1,0876
0,45
4,617
0,09
1,1037
0,445
4,570
0,095
1,1512
0,44
4,515
0,10
1,1964
0,435
4,478
0,105
1,2401
0,43
4,430
0,11
1,2951
0,425
4,376
0,115
1,3477
0,42
4,331
0,12
1,3978
0,415
4,280
0,125
1,4385
0,41
4,240
0,13
1,4883
0,405
4,171
0,135
1,5540
0,40
4,131
0,14
1,5842
0,394
4,069
0,145
1,6470
0,39
4,040
0,15
1,6840
0,385
3,990
0,155
1,7361
0,38
3,935
0,16
1,7914
0,374
3,889
0,165
1,8316
0,37
3,839
0,17
1,8798
0,365
3,7815
0,175
1,9335
0,36
3,7418
0,18
1,9861
0,355
3,6959
0,185
2,0277
0,349
3,6467
0,19
2,0800
0,345
3,5990
0,195
2,1275
0,34
3,5477
0,20
2,1739
0,334
3,4882
0,205
2,2193
0,329
3,4262
0,21
2,2690
0,325
3,3956
0,215
2,3279
0,32
3,3436
0,22
2,3693
0,314
3,2941
0,225
2,4237
0,31
3,2471
0,23
2,4672
0,305
3,2017
0,235
2,5201
0,299
3,1526
0,24
2,5722
0,295
3,0982
0,245
2,6160
0,29
3,0412
0,25
2,6695
0,285
2,9971
0,255
2,7120
0,28
2,9460
0,26
2,7728
0,275
2,9041
0,265
2,8309
0,27
2,8657
0,27
2,8723
0,265
2,8114
0,275
2,9113
0,259
2,7480
0,28
2,9777
0,255
2,7168
3
0,285
3,0257
0,25
2,6698
0,29
3,0718
0,245
2,6133
0,295
3,1254
0,24
2,5671
0,30
3,1628
0,235
2,5136
0,305
3,2247
0,23
2,4598
0,31
3,2673
0,225
2,4222
0,315
3,3243
0,22
2,3643
0,32
3,3591
0,215
2,3166
0,325
3,4187
0,210
2,2689
0,33
3,4457
0,205
2,2124
0,335
3,5073
0,20
2,1745
0,34
3,5625
0,194
2,1179
0,345
3,6110
0,189
2,0677
0,35
3,6538
0,185
2,0256
0,355
3,6966
0,18
1,9765
0,36
3,7449
0,175
1,9278
0,365
3,8004
0,170
1,8768
0,37
3,8400
0,165
1,8265
0,375
3,9141
0,160
1,7804
0,38
3,9551
0,154
1,7211
0,385
4,0093
0,150
1,6800
0,39
4,0611
0,145
1,6294
0,395
4,101
0,140
1,5818
0,40
4,154
0,135
1,5317
0,405
4,186
0,130
1,4894
0,41
4,238
0,125
1,4464
0,415
4,296
0,120
1,3863
0,42
4,354
0,115
1,3382
0,425
4,392
0,110
1,2802
0,43
4,442
0,104
1,2344
0,435
4,496
0,100
1,1798
0,44
4,540
0,094
1,1297
0,445
4,583
0,090
1,0879
0,45
4,631
0,085
1,0533
0,455
4,695
0,080
0,9946
0,46
4,748
0,075
0,9378
0,465
4,788
0,070
0,8956
0,47
4,839
0,065
0,8427
0,475
4,893
0,060
0,7975
0,48
4,927
0,055
0,7261
0,485
4,990
0,050
0,6747
0,49
5,025
0,045
0,6478
Los datos fueron registrados el día miércoles 8 de mayo de 2014. Fuente
autores.
Tanque: para este caso, la planta o tanque es modelado con
base en las ecuaciones establecidas por Ogata [5] y el método
Copetiano para determinar la resistencia hidráulica del tanque.
Ogata establece la función de transferencia para sistemas de
nivel de líquido como:
(Ecu 1)
,
(
Reemplazando (Ecu 2) en (Ecu 3), se obtiene
Resolviendo
(Ecu 2)
(Ecu 3)
organizando
(Ecu 4)
Aplicando Laplace a (Ecu 4), se obtiene
(
(
(
( (
( , por lo tanto la función de
transferencia queda:
(
(Ecu 5)
(
R representa la resistencia hidráulica a la salida del tanque y
C representa la capacitancia del tanque o lo que es lo mimo, el
área transversal del tanque A.
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
Debe tenerse en cuenta, que los flujos laminares en los
tubos raramente ocurren en los procesos industriales, esto hace
que R no sea constante sino que dependa de la razón entre el
flujo Qo y de la altura diferencial, haciéndose con esto
necesario establecer una condición de operación para una
aproximación cercana con la realidad [5 y 6]. Como no existen
datos sobre el área del tanque, se obtuvo el perímetro del
tanque, se determinó el diámetro externo, después se restó el
espesor de la pared y finalmente se obtuvo el área.
Luego
(
Nota: este método solo aplica a unidades didácticas o a
sistemas donde la cantidad de volumen pueda ser manipulada
sin problemas.
>> Vent= [0.999 1.5149 2.0066 2.4995 2.9926 3.4869 4.076
4.571 5.001 5.496 5.993 6.489 7.087 7.490 7.989 8.522 9.021
9.522 10.022];
>> Q= [11.031579e-6 21.833333e-6 29.533606e-6
40.588690e-6 53.606138e-6 65.903890e-6 83.056957e-6
94.721263e-6 104.689204e-6 119.229973e-6 131.297014e-6
145.650217e-6 160.133445e-6 174.687322e-6 189.805844e-6
201.963534e-6 214.445272e-6 224.124514e-6 243.518847e6];
>>
En la tabla II se parecían los 6 datos registrados para
obtener las resistencias a diferentes niveles, de las cuales se
tomó por sugerencia del docente Ph.D. Francisco Ernesto
Moreno García el valor mayor, quedando
B. Modelamiento de los subsistemas, electroválvula, sensor
y tanque
Electroválvula: de los datos obtenidos en la tabla I, se
transcribe a Matlab y con el comando ident se procede a
obtener la función de transferencia de la electroválvula, el
modelo obtenido presenta una confiabilidad del 97,39%.
*
El método COPETIANO es un método ideado por el estudiante de
Ingeniería Electromecánica de la UFPS, Alejandro Vázquez, mientras se
encontraba trabajando con la unidad RT614 Gunt Hamburg, el día 9 de abril
de 2014.
(Ecu 7)
(
La función de transferencia es evaluada ante la entrada de
escalón unitario, obteniéndose (véase figura 4).
Step Response
3
2.5
2
1.5
1
0.5
0
TABLA II
CARACTERIZACIÓN DE LA RESISTENCIA HIDRÁULICA CERRADA AL 70%
Nivel h
t1 (seg)
t2 (seg)
Tprom
Resistencia R
(mts)
(seg)
(seg/mts2)
0,45 – 0,40
27,13
27,93
27,53
1920,671227
0,45 – 0,30
87,51
86,71
87,11
6077,358177
0,45 – 0,20
147,10
156,06
151,58
10575,20322
0,45 – 0,10
241,72
241,42
241,57
16853,48886
0,20 – 0,15
32,14
31,63
31,885
2224,504253
0,20 – 0,10
68,,41
67,54
67,975
4742,376559
Los datos fueron registrados el día miércoles 8 de mayo de 2014. Fuente
autores.
(
Gele(s)=
Amplitude
Ahora, el método Copetianao para determinar la resistencia
hidráulica*, consiste en un básico experimento para obtener el
valor de la oposición o resistencia que ofrece la válvula
manual de drenaje, sus acoples y la sección de tubería. La
válvula manual de drenaje del tanque es una llave tipo globo
de 1” y de ¼ de vuelta, con acoples de reducción de 1” a ¼”.
La tubería es de 45cm de largo en cobre. El método consiste
en llenar el tanque en su nivel de operación (por ejemplo entre
45cm-30cm), y tomar el tiempo que se demora en evacuar toda
el agua (véase tabla II). Para este caso la válvula manual de
drenaje se encuentra cerrada al 70%, y se considera el flujo
laminar para lo cual la resistencia se obtiene según Ogata [5]
utilizando la (Ecu 2) quedando:
(Ecu 6)
4
0
1
2
3
4
5
6
7
8
9
10
Time (sec)
Fig. 4. Respuesta de la electroválvula frente a la entrada de un escalón
unitario.
Sensor: de los datos obtenidos en la tabla II, una vez
ingresados a Matlab es obtenida la curva de histéresis (véase
figura 5), de la cual se parecía que el sensor no presenta
histéresis debido a la gran similitud de las dos
comportamientos, con el comando ident se procede a obtener
su función de transferencia, el modelo obtenido presenta una
confiabilidad del 97,39%. La función de transferencia es
obtenida con base a la calibración subiendo.
>> hsub= [0.045 0.05 0.055 0.06 0.065 0.070 0.075 0.08 0.085
0.09 0.095 0.10 0.105 0.11 0.115 0.12 0.125 0.13 0.135 0.14
0.145 0.15 0.155 0.16 0.165 0.17 0.175 0.18 0.185 0.19 0.195
0.20 0.205 0.21 0.215 0.22 0.225 0.23 0.235 0.24 0.245 0.25
0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29 0.295 0.30 0.305
0.31 0.315 0.32 0.325 0.33 0.335 0.34 0.345 0.35 0.355 0.36
0.365 0.37 0.375 0.38 0.385 0.39 0.395 0.40 0.405 0.41 0.415
0.42 0.425 0.43 0.435 0.44 0.445 0.45 0.455 0.46 0.465 0.47
0.475 0.48 0.485 0.49];
>> Vsub= [0.6662 0.6910 0.7469 0.7965 0.8446 0.9016
0.9514 1.0054 1.0876 1.1037 1.1512 1.1964 1.2401 1.2951
1.3477 1.3978 1.4385 1.4883 1.5540 1.5842 1.6470 1.6840
1.7361 1.7914 1.8316 1.8798 1.9335 1.9861 2.0277 2.0800
2.1275 2.1739 2.2193 2.2690 2.3279 2.3693 2.4237 2.4672
2.5201 2.5722 2.6160 2.6695 2.7120 2.7728 2.8309 2.8723
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
>> hbaj= [0.485 0.48 0.475 0.47 0.465 0.46 0.455 0.45 0.445
0.44 0.435 0.43 0.425 0.42 0.415 0.41 0.405 0.40 0.394 0.39
0.385 0.38 0.374 0.37 0.365 0.36 0.355 0.349 0.345 0.34 0.334
0.329 0.325 0.32 0.314 0.31 0.305 0.299 0.295 0.29 0.285 0.28
0.275 0.27 0.265 0.259 0.255 0.25 0.245 0.24 0.235 0.23 0.225
0.22 0.215 0.210 0.205 0.20 0.194 0.189 0.185 0.18 0.175
0.170 0.165 0.160 0.154 0.150 0.145 0.140 0.135 0.130 0.125
0.120 0.115 0.110 0.104 0.10 0.094 0.090 0.085 0.080 0.075
0.070 0.065 0.060 0.055 0.050 0.045];
>> Vbaj= [4.995 4.921 4.874 4.821 4.768 4.712 4.675 4.617
4.570 4.515 4.478 4.430 4.376 4.331 4.280 4.240 4.171 4.131
4.069 4.040 3.990 3.935 3.889 3.839 3.7815 3.7418 3.6959
3.6467 3.5990 3.5477 3.4882 3.4262 3.3956 3.3436 3.2941
3.2471 3.2017 3.1526 3.0982 3.0412 2.9971 2.9460 2.9041
2.8657 2.8114 2.7480 2.7168 2.6698 2.6133 2.5671 2.5136
2.4598 2.4222 2.3643 2.3166 2.2689 2.2124 2.1745 2.1179
2.0677 2.0256 1.9765 1.9278 1.8768 1.8265 1.7804 1.7211
1.6800 1.6294 1.5818 1.5317 1.4894 1.4464 1.3863 1.3382
1.2802 1.2344 1.1798 1.1297 1.0879 1.0533 0.9946 0.9378
0.8956 0.8427 0.7975 0.7261 0.6747 0.6478];
>> plot(hbaj,Vbaj,'r')
Step Response
12
10
8
Amplitude
2.9113 2.9777 3.0257 3.0718 3.1254 3.1628 3.2247 3.2673
3.3243 3.3591 3.4187 3.4457 3.5073 3.5625 3.6110 3.6538
3.6966 3.7449 3.8004 3.8400 3.9141 3.9551 4.0093 4.0611
4.101 4.154 4.186 4.238 4.296 4.354 4.392 4.442 4.496 4.540
4.583 4.631 4.695 4.748 4.788 4.839 4.893 4.927 4.990
5.025];
>> plot(hsub,Vsub)
>> hold on
5
6
4
2
0
0
1
2
3
4
5
6
-3
Time (sec)
x 10
Fig. 6. Respuesta del sensor de nivel frente a la entrada de un escalón unitario.
Tanque: para este caso, la función de transferencia se
obtiene reemplazando los valores de R y C en la (Ecu 5).
(
(Ecu 9)
(
La función de transferencia es evaluada ante la entrada de
escalón unitario, obteniéndose (véase figura 7).
Step Response
18000
16000
14000
5.5
12000
5
Amplitude
Curva caracterisitca subiendo
Curva caractyerisitca bajando
4.5
10000
8000
4
Voltaje (V)
6000
3.5
4000
3
2000
2.5
0
2
0
500
1000
1500
Time (sec)
1.5
Fig. 7. Respuesta de la planta o tanque frente a la entrada de un escalón
unitario.
1
0.5
0
0.05
0.1
0.15
0.2
0.25
0.3
Nivel h (mts)
0.35
0.4
0.45
0.5
Fig. 5. Curva de histéresis del sensor de nivel.
>> ident
Gsen(s)=
(
(
(Ecu 8)
La función de transferencia es evaluada ante la entrada de
escalón unitario, obteniéndose (véase figura 6).
C. Modelamiento del proceso en malla abierta y malla
cerrada
Una vez obtenidas las funciones de transferencia de cada
uno de los subsistemas, se procede a determinar la función de
transferencia en malla abierta y malla cerrada para observar su
comportamiento.
Malla abierta:
>> s= tf('s');
>> Gelec= 2.6928/(1.5602*s +1);
>> Gsen= 1.6393/(0.001*s +1);
>> Gtan= 16853.48886/(241.599937*s +1);
>> Gmab= (Gelec*Gtan*Gsen)
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
Transfer function:
7.44e004
--------------------------------------------0.3769 s^3 + 377.2 s^2 + 243.2 s + 1
Step Response
1.4
1.2
4
Amplitude
Step Response
x 10
7
Amplitude
System: Gmce
Peak amplitude: 1.19
Overshoot (%): 95.1
At time (sec): 0.224
1
>> step(Gmab)
8
6
0.8
System: Gmce
Final Value: 0.61
0.6
6
0.4
5
0.2
4
0
System: Gmce
Settling Time (sec): 17.4
System: Gmce
Rise Time (sec): 0.0751
0
5
10
15
20
25
Time (sec)
3
Fig. 9. Respuesta del sistema en malla cerrada ante la entrada de un escalón
unitario.
2
1
V. CONTROLADOR PID
0
0
500
1000
1500
Time (sec)
Fig. 8. Respuesta del sistema en malla abierta ante la entrada de un escalón
unitario.
Malla cerrada: el análisis del sistema en este caso, es
equivalente al análisis sin controlador (véase figura 9), en
donde se aprecia que el sistema tiene un comportamiento
subamortiguado con un sobreimpulso máximo de 95,1%, un
tiempo pico de 0,224seg, tiempo de subida de 0,0751seg, un
tiempo de asentamiento de 17,4seg estabilizándose a una
amplitud de 0,61. Al organizar la función de transferencia en
malla cerrada a través del comando zpk se obtiene que existe
un polo y un cero que se anulan por tener la misma magnitud y
ubicación, y que el polo que causa el comportamiento y
atenuación del sistema es (s+ 0,002±0,0140i).
>> Gmce= feedback(Gelec*Gtan,Gsen)
Utilizando la herramienta rltool (Automated Tuning) de
Matlab se diseña un controlador PI y PID, con lo cual se hará
una comparación entre las formas de respuesta obtenidas. El
método utilizado es el de Ziegler-Nichols open loop.
Con el control PI se obtiene la siguiente función de
transferencia, obteniéndose la siguiente respuesta (véase figura
10). En la figura se observa que el sistema presenta un sobre
pico y tiempo pico de 16,2% y 5,73seg respectivamente, un
tiempo de subida de 2,56seg y de asentamiento de 12,7seg.
Transfer function from input "Input" to output "Output":
0.002083 s + 7.519e-006
------------------------------s
System: Closed Loop r to y
I/O: r to y
Peak amplitude: 0.709
Overshoot (%): 16.2
At time (sec): 5.73
0.8
0.7
>> zpk(Gmce)
Zero/pole/gain:
120.3973 (s+1000)
----------------------------------------(s+1000) (s^2 + 0.4477s + 197.3)
0.6
System: Closed Loop r to y
System: Closed Loop r to y
I/O: r to y
I/O: r to y
Final Value: 0.61
Settling Time (sec): 12.7
System: Closed Loop r to y
0.5
I/O: r to y
Rise Time (sec): 2.56
Amplitude
Transfer function:
45.38 s + 4.538e004
-----------------------------------------------------0.3769 s^3 + 377.2 s^2 + 243.2 s + 7.44e004
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
12
14
16
18
Time (sec)
Fig. 10. Respuesta del sistema en malla cerrada con controlador PI ante la
entrada de un escalón unitario.
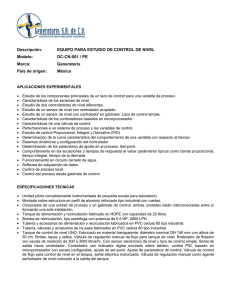
Con el control PID se obtiene la siguiente función de
transferencia, obteniéndose la siguiente respuesta (véase figura
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
11). En la figura se aprecia que el sistema presenta un sobre
pico y tiempo pico de 11% y 4,2seg respectivamente, un
tiempo de subida de 2,06seg y de asentamiento de 6,77seg.
Como se aprecia para este caso el controlador PID es más
rápido y presenta mejores características que el controlador PI.
Transfer function from input "Input" to output "Output":
0.001558 s^2 + 0.003299 s + 8.504e-006
-------------------------------------------------(Ecu 10)
s
0.7
Amplificador Derivativo
Esta configuración consta de un amplificador en
configuración derivativo, con la siguiente función de
transferencia:
(Ecu 13)
Con la (Ecu 13) se asume el valor de C2 para así obtener R4,
donde se obtiene:
Después de obtenido los paramentos del controlador PID, se
implementa el circuito en la protoboard para posteriormente
hacer las pruebas en el laboratorio con la unidad didáctica. Los
parámetros obtenidos del controlador PID, y sus respectivos
ajuste se aprecian en (véase tabla III).
System: Closed Loop r to y
I/O: r to y
Final Value: 0.61
System: Closed Loop r to y
I/O: r to y
0.6Peak amplitude: 0.677
Overshoot (%): 11
At time (sec): 4.2
System: Closed Loop r to y
I/O: r to y 0.5
7
System: Closed Loop r to y
I/O: r to y
Settling Time (sec): 6.77
Amplitude
Rise Time (sec): 2.06
TABLA III
PARÁMETROS KP, KI Y KD DEL CONTROLADOR PID
Kp
Ki
Kd
1 “sin ajuste”
0,003299 8,504
0,001558
0.4
0.3
Fuente autores.
0.2
VII. RESULTADOS Y DISCUSIÓN
0.1
0
0
2
4
6
8
10
12
14
16
Time (sec)
Fig. 11. Respuesta del sistema en malla cerrada con controlador PID ante la
entrada de un escalón unitario.
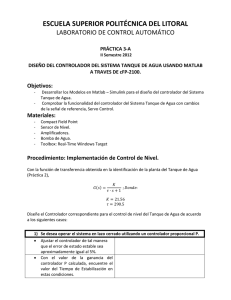
De la tabla III, solo se implementó físicamente en
protoboard, el controlador obtenido directamente de la (Ecu
10), el ítem 1 “sin ajuste”, con los valores de resistencia
hallados en las (Ecu 11, 12 y 13). La válvula de drenaje se
cerró al 70%, y el circuito se alimentó a +12VDC y -12VDC
(véase figura 12).
VI. IMPLEMENTACIÓN DEL RESTADOR Y CONTROLADOR PID
En la implementación de la etapa sumadora y el controlador
PID, se utilizó amplificadores operacionales TL082CN y
LM324 respectivamente.
Para la implementación de la etapa restadora (donde se
agrupan el set-point y la señal de realimentación sensor), se
implementó una configuración restadora, la cual cumplirá la
función de restar las dos señales. La señal del sensor se ubica
en la entrada inversora y la señal del set-point en la entrada no
inversora.
Una vez diseñado el controlador PID, y obtenido la función
de transferencia del controlador se procede a diseñar cada una
de las configuraciones Proporcional, Integral y Derivativa del
PID. De la (Ecu 10) se toma el valor de Kp, Ki y Kd, los
cuales son: Kp= 0,003299, Ki= 8,504*10 -6 y Kd= 0,001558.
Amplificador Proporcional
Esta configuración consta de un amplificador en
configuración inversor, con la siguiente función de
transferencia:
(Ecu 11)
Con la (Ecu 11) se asume el valor de R1 para así obtener R2,
donde se obtiene:
Amplificador Integral
Esta configuración consta de un amplificador en
configuración integrador, con la siguiente función de
transferencia:
(Ecu 12)
Con la (Ecu 12) se asume el valor de C1 para así obtener R3,
donde se obtiene:
Fig. 12. Primera prueba realizada con los paramentos obtenidos del PID, sin
ajuste fino. La prueba fue realizada el día 15 de mayo de 2014.
El controlador responde relativamente rápido dependiendo
la ubicación del set-point, pero del controlador se observan dos
particularidades a resaltar, 1) La bomba es accionada con 9V
indistintamente del error, y este no es reducido paulatinamente
a medida que se acerca al nivel deseado, algo no razonable en
los controladores PID de óptimo funcionamiento, y 2) El
> PROYECTO DE LA ASIGNATURA CONTROL AUTOMATUICO: CONTROLADOR PID PARA NIVEL D TANQUE
DE LA UNIDAD DIDACTICA RT614 GUNT HAMBURG 2014.05 <
sistema funciona como si fuera un controlador on-off, pues,
una vez alcanza el nivel deseado la electroválvula deja de
funcionar, y como es lógico el nivel empieza a descender
lentamente por efecto de la fuga de agua a través de la válvula
de drenaje, pero el controlador no reacciona inmediatamente
sino cuando existe un error extremadamente grande “alrededor
de los 0,2V”, lo que hace pensar que existiera un retardo en el
accionamiento del controlador, o el controlador reacciona a
márgenes grandes de error. Pareciera que el valor tan reducido
de la componente Ki= 8,504*10-6 fuera la directa responsable
a dicho comportamiento.
Responde de forma aceptable con porcentajes de cierre de la
válvula de drenaje entre 70% hasta 45%, aunque el tiempo de
establecimiento se ve afectado, el controlador es capaz de
mantener el nivel, pero con valores mayores de oscilación. Y
con valores de cierre menores a 45% el controlador no
responde quedándose completamente sin control.
derivativa y aumentar la integrativa para que mejore la rapidez
de la respuesta.
Para posteriores trabajos seria relevante reajustar o hacer un
ajuste fino a la componente integrativa, para así poder tener un
control que regule de forma instantánea el nivel del tanque,
con el más mínimo valor de error.
REFERENCIA BIBLIOGRAFICA
[1]
[2]
[3]
[4]
VIII. RECOMENDACIONES
[5]
Si se decide trabajar el sistema en M.K.s. o c.g.s. todas las
variables de longitud, perímetro, área y volumen, deben estar
en centímetro o metros. Lo mismo se debe hacer cuando se
obtenga las funciones de transferencia de los subsistemas.
Para obtener la función de trasferencia del controlador de la
herramienta rltool, se realizan los siguientes pasos:
Se pincha en “file”, después se selecciona la “Export..”, luego
se selecciona la casilla “Compensador C”, luego desde el
Comand Windows se digita: C= tf(C).
Para saber cuáles son las constantes P, I y D del controlador
que se ha diseñado a través de la herramienta rltool de Matlab
“Automatic Tuning”, se tiene en cuanta la siguiente regla: El
valor de la variables P está acompañada de “s”, el valor de la
variables I se encuentra completamente sola, y el valor de la
variables D está acompañada de “s2”.
Al ahora de implementar la etapa sumadora y controlador
PID, se deben utilizar amplificadores operacionales que
utilicen fuentes positiva y negativa, VCC y VEE.
Después de haber realizado el montaje del controlador PID,
revisar con el voltímetro las salidas del proporcional, integral y
el derivativo, así como también la salida de la etapa sumadora.
Revisar y confirmar el valor de las resistencias y
condensadores utilizados en el montaje.
Después de diseñado el controlador PID, se debe tener en
cuenta que exista una relación equilibrada entre las tres
componentes para evitar, que el controlador se convierta en PI
o PD.
[6]
IX. CONCLUSIONES
La resistencia hidráulica que se presenta a la salida del
caudal, está directamente relacionada con el porcentaje de
cierre que tenga la válvula de drenaje, a mayor porcentaje de
cierre mayor resistencia hidráulica R presentara el tanque, lo
que indica que se demora más tiempo en evacuarse el tanque.
De la primera prueba realizada “sin ajuste”, la razón por la
cual el controlador PID se comportara como un control on-off,
se debe a que la componente proporcional y derivativo son
altas en cooperación a la integrativa, convirtiéndolo en un
control PD, lo que hace necesario disminuir la componente
8
Figura unidad de demostración de control de nivel [en línea]. Disponible
en:
http://www.selkagmbh.com/popup_image.php?pID=540&image=0&xpl
oidID=d18d18cdfe91a041767c1713c56d2ee1
Figura diagrama esquemático de la unidad de demostración de control de
nivel
[en
línea].
Disponible
en:
http://www.selkagmbh.com/popup_image.php?pID=540&image=2&xpl
oidID=d18d18cdfe91a041767c1713c56d2ee1
R. Pallas Arney, Sensores y Acondicionadores de Señal (libro).
Marcombo, 1990, pp. 16.
S.n, Introducción a la Instrumentación Industrial. Departamento de
Diseño
Mecánico,
(s.f)
[en
línea],
Disponible
en:
http://www.tav.net/transductores/instrumentacion-industrial.pdf
K. Ogata, Ingeniería Moderna de Control (libro), 5 ed. Madrid, España:
PEARSON EDUCACION, S.A., 2010, pp. 101-104.
A. Vásquez, “Modelado, Simulación y Control de Nivel de Altura para
Modulo de Unidad Didáctica RT614 Gunt Hamburg” (proyecto de la
asignatura Control Automático), Trabajo no publicado, mayo 8 de 2014.