Boletin práctica de Rutas.
Anuncio

FUNDAMENTOS DE NAVEGACIÓN AÉREA
Práctica 1: Cartografía y Rutas.
NOMBRE DEL ALUMNO:
En esta práctica se pretende repasar los conceptos estudiados de cartografía y rutas.
Evaluación: Se pide resolver el problema indicado al final con los datos especificados para
cada alumno que se pueden encontrar en enseñanza virtual.
1. Cartografía
Arrancar los ordenadores del centro de cálculo con Matlab.
Vamos a añadir funcionalidades de cartografía incluyendo el paquete gratuito m_map, que
se puede encontrar en:
http://www.eos.ubc.ca/~rich/private/mapug.html
La propia página indicada es una guía que vamos a seguir parcialmente, adaptada a nuestras
necesidades. Se descarga el archivo zip enlazado al principio. Se añade el directorio donde se haya
instalado al path de Matlab.
Este paquete nos permite dibujar mapas del mundo usando distintas proyecciones. El primer
ejemplo podría ser escribir en Matlab:
m_proj('oblique mercator');
m_coast;
m_grid;
Observamos un mapa poco reconocible; se trata de la región noroeste de Estados Unidos y
Canadá, de donde son los autores del paquete, en una proyección que no hemos visto en clase
(Mercator oblicua). Si quisiéramos dibujar un mapa más reconocible para nosotros, cerramos la
anterior figura y escribimos:
m_proj('Equidistant Cylindrical','longitudes',[-10 5],'latitudes',[35 45])
m_coast;
m_grid;
Para ver la lista de proyecciones disponibles, escribimos:
m_proj set;
Obtenemos la siguiente lista:
Available projections are:
Stereographic
Orthographic
Azimuthal Equal-area
Azimuthal Equidistant
Gnomonic
Satellite
Albers Equal-Area Conic
Lambert Conformal Conic
Mercator
Miller Cylindrical
Equidistant Cylindrical
Oblique Mercator
Transverse Mercator
Sinusoidal
Gall-Peters
Hammer-Aitoff
Mollweide
Robinson
UTM
De estas, algunas se han visto en clase y otras no. Para informarse rápidamente de las
propiedades de estas proyecciones, se puede consultar la lista de Wikipedia donde están casi todas:
http://en.wikipedia.org/wiki/List_of_map_projectionsl
La guía también explica bastante bien todas las proyecciones disponibles. Una vez
seleccionada una proyección, podemos ver sus propiedades con la orden
m_proj get
Para ver las propiedades de una proyección distinta a la que tenemos podemos usar:
m_proj('set','stereographic');
Para ver un mapa global del mundo podemos usar varias proyecciones. Escribimos varios
ejemplos, hay que cerrar la anterior figura para cada uno de ellos:
m_proj('Equidistant Cylindrical');
m_coast;
m_grid;
Probar la Mercator, la Lambert Conformal Conic y la Miller. Si por ejemplo si queremos ver
la zona de los polos, es más recomendable usar una proyección estereográfica.
m_proj('stereographic','lat',90,'long',0,'radius',90);
m_coast;
m_grid;
Los otros dos comandos tienen la siguiente función:
m_coast dibuja la línea costera con una precisión de ¼ de grado. Se puede conseguir mayor
resolución (ver la guía de m_map). También se pueden usar otras opciones. Por ejemplo:
m_coast('linewidth',2,'color','r');
usa una línea más gruesa y roja. Para rellenar las zonas de Tierra:
m_coast('patch',[.7 .7 .7],'edgecolor','none');
m_grid
dibuja las líneas de longitud y latitud.
m_grid get
da las opciones disponibles. Por ejemplo, dibujando de nuevo la cilíndrica equidistante:
m_proj('Equidistant Cylindrical');
m_coast;
m_grid('box','fancy');
El paquete tiene muchas otras posibilidades, descritas en la guía. Básicamente lo usaremos
para dibujar rutas.
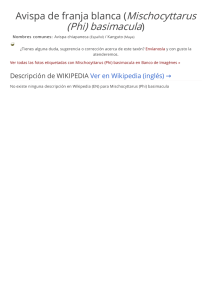
2. Rutas
Explicaremos el cálculo y representación de rutas con un ejemplo. Fijar la proyección
cilíndrica equidistante de momento. Vamos a calcular la ruta ortodrómica y loxodrómica entre
Bogotá (4º35’56” N 74º04’51” O) y Sidney (33º51’36”S 151º12’40”E).
Empezamos definiendo las coordenadas:
phiA=4+35/60+56/3600;
lambdaA=-(74+04/60+51/3600);
phiB=-(33+51/60+36/3600);
lambdaB=151+12/60+40/3600;
Pasamos los datos a radianes para más adelante:
phiA_rad=phiA*pi/180;
lambdaA_rad=lambdaA*pi/180;
phiB_rad=phiB*pi/180;
lambdaB_rad=lambdaB*pi/180;
Ahora representamos las ciudades en el mapa usando la orden m_plot:
hold on;
m_plot(lambdaA, phiA,'b*');
m_plot(lambdaB,phiB,'r*');
Se ve claro que la ruta debe ir hacia el Oeste. Por si acaso podemos comprobar
abs(lambdaA-lambdaB)
Calculamos la distancia (en nmi) y rumbo ortodrómicos
alpha=acos(sin(phiA_rad)*sin(phiB_rad)+cos(phiA_rad)*cos(phiB_rad)*cos(lambdaB_r
ad-lambdaA_rad));
orth_distance=alpha*180/pi*60
chi=acos((cos(phiA_rad)*sin(phiB_rad)sin(phiA_rad)*cos(phiB_rad)*cos(lambdaB_rad-lambdaA_rad))/sin(alpha));
De modo que ya tenemos la distancia, pero el curso no es correcto. Lo corregimos por ir
hacia el Oeste y lo escribimos por pantalla en grados:
chi=2*pi-chi;
orth_initial_course=chi*180/pi
Repetimos con la loxodrómica, teniendo en cuenta que cruzamos el meridiano 180º y que B
está al Este y al Sur de A, escribiéndolo por pantalla en grados:
chi_lox=atan((lambdaB_rad-2*pi-lambdaA_rad)/log((tan(pi/4-phiA_rad/2)/tan(pi/4phiB_rad/2))));
chi_lox=chi_lox+pi;
loxo_course=chi_lox*180/pi
Finalmente calculamos la distancia loxodrómica en nmi:
loxo_angle_distance=(phiB_rad-phiA_rad)/cos(chi_lox);
loxo_distance=loxo_angle_distance*180/pi*60
Es importante comparar la ortodrómica y la loxodrómica y ver si los resultados tienen
sentido. Ahora vamos a usar la cartografía para dibujar las rutas. Elegimos cien puntos para cada
una de ellas y empezamos por la ortodrómica.
N=100;
%Predefine the vectors which we will compute
phi_ort=zeros(N,1);
lambda_ort=zeros(N,1);
Ahora calculamos los puntos que conforman la ortodrómica, recordando que está va hacia el
Oeste.
for i=1:N
distance=alpha/N*i;
phi_ort(i)=asin(cos(chi)*sin(distance)*cos(phiA_rad)+cos(distance)* ...
sin(phiA_rad));
lambda_ort(i)=lambdaA_rad+2*pi-acos((cos(distance)-...
sin(phiA_rad)*sin(phi_ort(i)))/(cos(phiA_rad)*cos(phi_ort(i))));
if lambda_ort(i)>pi
lambda_ort(i)=lambda_ort(i)-2*pi;
end
if lambda_ort(i)<-pi
lambda_ort(i)=lambda_ort(i)+2*pi;
end
phi_ort(i)=phi_ort(i)*180/pi;
lambda_ort(i)=lambda_ort(i)*180/pi;
end
Para representar, es importante tener en cuenta que el cruce por 180º estropea la
representación. Para ello metemos un NaN (que Matlab no representa) justo en el cruce:
for i=1:N-1
if abs(lambda_ort(i)-lambda_ort(i+1))>180
lambda_ort=[lambda_ort(1:i);NaN;lambda_ort(i+1:end)];
phi_ort=[phi_ort(1:i);NaN;phi_ort(i+1:end)];
end
end
m_plot(lambda_ort,phi_ort);
Repetimos el proceso con la loxodrómica:
phi_lox=zeros(N,1);
lambda_lox=zeros(N,1);
for i=1:N
distance=loxo_angle_distance/N*i;
phi_lox(i)=distance*cos(chi_lox)+phiA_rad;
lambda_lox(i)=lambdaA_rad+tan(chi_lox)*log((tan(pi/4-phiA_rad/2)/tan(pi/4phi_lox(i)/2)));
if lambda_lox(i)>pi
lambda_lox(i)=lambda_lox(i)-2*pi;
end
if lambda_lox(i)<-pi
lambda_lox(i)=lambda_lox(i)+2*pi;
end
phi_lox(i)=phi_lox(i)*180/pi;
lambda_lox(i)=lambda_lox(i)*180/pi;
end
for i=1:N-1
if abs(lambda_lox(i)-lambda_lox(i+1))>180
lambda_lox=[lambda_lox(1:i);NaN;lambda_lox(i+1:end)];
phi_lox=[phi_lox(1:i);NaN;phi_lox(i+1:end)];
end
end
m_plot(lambda_lox,phi_lox);
Vamos a estudiar ahora como aproximar la ortodrómica por varios segmentos loxodrómicos,
por ejemplo 3. Para ello tenemos que calcular dos puntos intermedios, a alpha/3 y 2*alpha/3 de
distancia del punto A.
phi1=asin(cos(chi)*sin(alpha/3)*cos(phiA_rad)+cos(alpha/3)*sin(phiA_rad));
lambda1=lambdaA_rad+2*pi-acos((cos(alpha/3)sin(phiA_rad)*sin(phi1))/(cos(phiA_rad)*cos(phi1)));
if lambda1>pi
lambda1=lambda1-2*pi;
end
if lambda1<-pi
lambda1=lambda1+2*pi;
end
phi2=asin(cos(chi)*sin(2*alpha/3)*cos(phiA_rad)+cos(2*alpha/3)*sin(phiA_rad));
lambda2=lambdaA_rad+2*pi-acos((cos(2*alpha/3)sin(phiA_rad)*sin(phi2))/(cos(phiA_rad)*cos(phi2)));
if lambda2>pi
lambda2=lambda2-2*pi;
end
if lambda2<-pi
lambda2=lambda2+2*pi;
end
m_plot(lambda1*180/pi, phi1*180/pi,'k*');
m_plot(lambda2*180/pi,phi2*180/pi,'k*');
Viendo los puntos en el mapa, tenemos que calcular ahora tres loxodrómicas. De A a 1, de 1
a 2, y de 2 a B. Observamos que 1 está al sur de A, 2 está al sur de 1, pero B está al norte de 2!
También, el único cruce por 180º sucede de 2 a B. Calculamos primero las loxodrómicas:
chi_loxA1=atan((lambda1-lambdaA_rad)/log((tan(pi/4-phiA_rad/2)/tan(pi/4phi1/2))));
chi_loxA1=chi_loxA1+pi;
loxo_courseA1=chi_loxA1*180/pi
loxo_angle_distanceA1=(phi1-phiA_rad)/cos(chi_loxA1);
loxo_distanceA1=loxo_angle_distanceA1*180/pi*60
chi_lox12=atan((lambda2-lambda1)/log((tan(pi/4-phi1/2)/tan(pi/4-phi2/2))));
chi_lox12=chi_lox12+pi;
loxo_course12=chi_lox12*180/pi
loxo_angle_distance12=(phi2-phi1)/cos(chi_lox12);
loxo_distance12=loxo_angle_distance12*180/pi*60
chi_lox2B=atan((lambdaB_rad-2*pi-lambda2)/log((tan(pi/4-phi2/2)/tan(pi/4phiB_rad/2))));
loxo_course2B=chi_lox2B*180/pi
loxo_angle_distance2B=(phiB_rad-phi2)/cos(chi_lox2B);
loxo_distance2B=loxo_angle_distance2B*180/pi*60
total_approx_loxo_distance=loxo_distanceA1+loxo_distance12+loxo_distance2B
Comparar la distancia suma de los tres segmentos con la loxodrómica y ortodrómica directa.
Finalmente representamos la ruta aproximada calculando los puntos de las tres loxodrómicas y
uniéndolos:
phi_loxA1=zeros(N,1);
lambda_loxA1=zeros(N,1);
for i=1:N
distance=loxo_angle_distanceA1/N*i;
phi_loxA1(i)=distance*cos(chi_loxA1)+phiA_rad;
lambda_loxA1(i)=lambdaA_rad+tan(chi_loxA1)*log((tan(pi/4phiA_rad/2)/tan(pi/4-phi_loxA1(i)/2)));
phi_loxA1(i)=phi_loxA1(i)*180/pi;
lambda_loxA1(i)=lambda_loxA1(i)*180/pi;
end
phi_lox12=zeros(N,1);
lambda_lox12=zeros(N,1);
for i=1:N
distance=loxo_angle_distance12/N*i;
phi_lox12(i)=distance*cos(chi_lox12)+phi1;
lambda_lox12(i)=lambda1+tan(chi_lox12)*log((tan(pi/4-phi1/2)/tan(pi/4phi_lox12(i)/2)));
phi_lox12(i)=phi_lox12(i)*180/pi;
lambda_lox12(i)=lambda_lox12(i)*180/pi;
end
phi_lox2B=zeros(N,1);
lambda_lox2B=zeros(N,1);
for i=1:N
distance=loxo_angle_distance2B/N*i;
phi_lox2B(i)=distance*cos(chi_lox2B)+phi2;
lambda_lox2B(i)=lambda2+tan(chi_lox2B)*log((tan(pi/4-phi2/2)/tan(pi/4phi_lox2B(i)/2)));
if lambda_lox2B(i)>pi
lambda_lox2B(i)=lambda_lox2B(i)-2*pi;
end
if lambda_lox2B(i)<-pi
lambda_lox2B(i)=lambda_lox2B(i)+2*pi;
end
phi_lox2B(i)=phi_lox2B(i)*180/pi;
lambda_lox2B(i)=lambda_lox2B(i)*180/pi;
end
phi_lox_approximate=[phi_loxA1;phi_lox12;phi_lox2B];
lambda_lox_approximate=[lambda_loxA1;lambda_lox12;lambda_lox2B];
for i=1:3*N-1
if abs(lambda_lox_approximate(i)-lambda_lox_approximate(i+1))>180
lambda_lox_approximate=[lambda_lox_approximate(1:i);NaN;lambda_lox_approximate(i
+1:end)];
phi_lox_approximate=[phi_lox_approximate(1:i);NaN;phi_lox_approximate(i+1:end)];
end
end
m_plot(lambda_lox_approximate,phi_lox_approximate);
Ejercicio en clase: Repetir este procedimiento con la ruta Ciudad de México-Islamabad.
Ejercicio fuera de clase (a entregar): será asignado próximamente.