A CART Based Mechanism for Collision Detection in IEEE 802.11
Anuncio

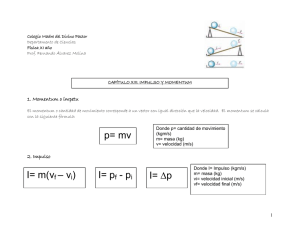
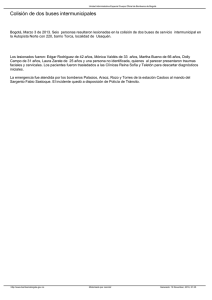
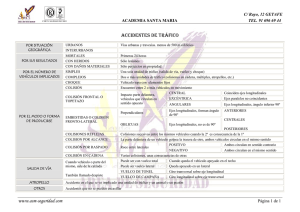
920 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 3, MAY 2013 A CART Based Mechanism for Collision Detection in IEEE 802.11 M. N. Aman and B. Sikdar, Senior Member, IEEE 1 Abstract— The ability to detect and distinguish packet errors due to collisions from those caused by channel errors can significantly impact the performance of medium access control (MAC) protocols such as IEEE 802.11. In particular, such mechanisms affect the backoff mechanism as well as rate adaptation algorithms. This paper presents a real-time algorithm based on classification and regression trees (CART) for distinguishing packet corruption and losses due to channel errors from those caused by collisions with other simultaneous transmissions. Using a set of four metrics, we propose a classifier tree that reduces the classification errors by considering the impact of channel variations and collisions on bit errors from multiple, disparate perspectives. Extensive simulation results are used to verify the superior performance of the proposed technique over existing mechanisms. Keywords— Wireless Networks, Collision Detection, IEEE 802.11, Local Area Networks. E I. INTRODUCCION L USO de tecnologías inalámbricas para el acceso a la red se ha vuelto muy popular en la última década. Entre los diversos mecanismos de Wi-Fi disponibles, IEEE 802.11 o Wi-Fi es el más popular para redes de área local (LAN). Importante trabajo realizado en los últimos años para mejorar el rendimiento de IEEE 802.11. Sin embargo, varios factores asociados con el uso de la detección de portadora acceso múltiple (CSMA) como el protocolo subyacente para compartir el medio conduce a ciertas ineficiencias que no han abordado todavía. Este documento aborda el problema de la detección de colisiones en redes inalámbricas mediante IEEE 802.11 como protocolo MAC. La incapacidad de una radio inalámbrica para transmitir y escuchar al mismo tiempo implica que el IEEE 802.11 depende CSMA con la evitación de colisión (CA) en lugar de CSMA con detección de colisiones (CD) como Ethernet o IEEE 802.3. Además, a diferencia de IEEE 802.3 donde todos los nodos comparten un dominio de colisión son capaces de recibir transmisiones entre sí, nodos usando IEEE 802.11 pueden ser demasiado de algunos nodos para recibir sus transmisiones (y viceversa) pero todavía causan colisiones mutuamente. La incapacidad de un nodo inalámbrico para "detectar" una colisión tiene dos efectos negativos: en primer lugar, se desperdicia ancho de banda en las transmisiones que chocan en vez de terminarles. En segundo lugar, un nodo innecesariamente realiza backoff y aplaza accedan al canal, ----------------------------------------------- 1 M. N. Aman, Rensselaer Polytechnic Institute, Troy, NY, USA, naveed.aman@nu.edu.pk B. Sikdar, Rensselaer Polytechnic Institute, Troy, NY, USA, bsikdar@ecse.rpi.edu incluso cuando una pérdida de paquetes es causada debido a errores de canal, puesto que el nodo no puede distinguir entre un error de canal y una colisión. Esto es porque IEEE 802.11 utiliza un mecanismo donde los paquetes de reconocimiento (ACK) se utilizan para deducir la entrega exitosa de un paquete. En IEEE 802.11, si un nodo no recibe una confirmación para su transmisión, si infiere el paquete se perdió debido a una colisión y realiza un backoff exponencial. Sin embargo, en entornos inalámbricos una pérdida del paquete también puede deberse a errores de canal causados por las señales débiles y desvanecimiento multitrayecto. Además de ayudar a optimizar el uso del mecanismo backoff en IEEE 802.11, la capacidad de detectar colisiones y distinguir las pérdidas de paquetes causadas por las colisiones de los causados por errores de canal puede tener un impacto positivo en otros mecanismos así. Por ejemplo, adaptación de la velocidad de datos codiciosos se ha propuesto para muchas aplicaciones de alta velocidad de datos. Algoritmos de adaptación de tipo agresivo como AMRR y SampleRate [1],[2], intente aumentar el rendimiento mediante tasas de datos con mayores tasas de pérdida. Así, si la relación señal a ruido (SNR) es baja, un paquete modulado a una velocidad de datos alta puede estar dañado por el medio ambiente en la medida en que el receptor deja caer. Sin embargo, el IEEE 802.11 deduce esta pérdida de paquetes como una colisión e inicia el proceso de backoff exponencial. Por el momento que los algoritmos de adaptación tasa atribuyen la pérdida de paquetes a una señal débil (generalmente después de múltiples intentos de retransmisión de fallidos) el nodo experiencias significativa (e innecesaria) pérdida de rendimiento. De la discusión anterior es evidente que comprender la causa de una pérdida de paquetes es un factor importante para mejorar el rendimiento de las redes inalámbricas. Literatura existente ha demostrado que la clasificación correcta de errores de paquete puede aumentar el rendimiento en un 2060% y reducir las retransmisiones en 40%, dependiendo de las condiciones del canal [3]. Este documento aborda el problema de desarrollar un mecanismo para determinar con exactitud la causa de una pérdida de paquetes por clasificar con exactitud la pérdida como causados por una colisión o debido a errores de canal. Un pequeño número de técnicas se ha propuesto en la literatura para la detección de colisión en redes inalámbricas. Un mecanismo de detección de colisiones, llamado a CARA se ha propuesto en [4] y se basa en el uso de múltiples paquetes RTS/CTS. Usos RRAA [5] la CARA basado en esquema RTS/CTS para deducir una pérdida de paquetes sea debido a una colisión o señal débil. Un método para aislar AMAN AND SIKDAR : A CART BASED MECHANISM FOR COLLISION errores físicos paquetes de errores de paquete de colisión con RTS/CTS y paquete de fragmentación se da en [6]. Estos métodos requieren la observación y la transmisión de varios paquetes RTS/CTS, por lo que requiere mucho tiempo para aislar a la causa de una pérdida de paquetes. Por el contrario, nuestro enfoque para la detección de colisiones es más directo y se basa en indicadores que pueden obtenerse inmediatamente en el paquete recibido, así nos da resultados inmediatos en tiempo real. En [3] se propone un esquema para la detección de colisión con tres canal calidad relacionada con las métricas y un voto de métrico. Resultados de la simulación presentados en este documento muestran que nuestra propuesta técnica lleva a una reducción significativa en las tasas de falsas alarmas y mejora en la precisión de la detección. En este trabajo se propone un mecanismo basado en el uso de la clasificación y árboles de regresión para determinar la raíz causan de una pérdida de paquetes y clasifican las pérdidas como colisiones o errores de canal. El mecanismo propuesto utiliza un vector de parámetros asociados a la calidad de recepción de la señal a un receptor. Estos indicadores y datos de simulación extensa se utilizan para generar un árbol de clasificación y regresión para el análisis de causa raíz. Demostramos que la información recabada relacionadas con los cuatro indicadores pueden utilizarse para crear un modelo de CART muy preciso para detectar colisiones. Resultados de la simulación extensa se utilizan para mostrar el funcionamiento superior de los mecanismo de detección de colisión propuesta sobre los propuestos en la literatura. El resto del libro está organizado como sigue. En la Sección 2 se presentan el modelo de sistema y detalles del simulador utilizado. Sección 3 presenta la métrica de magnitud basada en error del vector utilizada en este trabajo. Sección 4 presenta nuestro colisión del CART basado en resultados de evaluación de rendimiento y mecanismo de detección. Por último, la Sección 5 concluye el documento. II. SISTEMA Y EL MODELO DE SIMULACIÓN En esta sección se describe el modelo de sistema asumido en este trabajo. Los modelos de transmisor y receptor utilizan para este seguimiento de papel el IEEE 802. 11a especificaciones [7]. Los pares de transmisor y receptor se supone que conectarse a través de un canal multitrayecto. Asumimos una multipath plana frecuencia canal de desvanecimiento Rayleigh usando el modelo de Jake [8]. El transmisor produce una secuencia de bits del mensaje al azar. Estos bits se pasan a través de un codificador convolucional interleaver y modulador cuyos parámetros son dependientes de velocidad de datos. Los parámetros de modulación depende de la velocidad de datos se dan en la Tabla 1. El transmisor utiliza modulación OFDM para asignar a cada uno de los símbolos N modulada a una subportadora independiente creando corrientes paralelas N. Finalmente la corrientes paralelas se convierten en una serie de muestras por 921 el paralelo al bloque de conversión serial. Figura 1. Escenario para la introducción de colisiones. TABELA I PARÁMETROS DE MODULACIÓN DEPENDIENTES DE VELOCIDAD DE DATOS PARA EL MODELO DE SIMULACIÓN Velocidad de Datos (Mbps) Modulación R NBPSC NCBPS NDBPS 6 9 12 18 24 36 48 54 BPSK BPSK QPSK QPSK 16QAM 16QAM 64QAM 64QAM 1/2 3/4 1/2 3/4 1/2 3/4 2/3 3/4 1 1 2 2 4 4 6 6 48 48 96 96 192 192 288 288 24 36 48 72 96 144 192 216 R: Tipo de codificación, NBPSC: Bits codificados por subpor-tadora, NCBPS: Bits codificados por símbolo OFDM, NDBPS: Bits de datos por símbolo OFDM TABELA II OFDM Y SINCRONIZACIÓN PARÁMETROS RELACIONADOS Parámetros Valor NSYM : Muestras por símbolo OFDM NFFT : Longitud FFT NSD : Número de subportadoras de datos NSP : Número de subportadoras pilotos NST : Número de subportadoras totales NTRAIN : Número de símbolos de formación ΔF : Espaciamiento de frecuencia subportadora TFFT : Período IFFT/FFT TPREAMBLE : Duración preámbulo TGI : Guarda la duración del intervalo (GI) TGI2 : Duración de entrenamiento símbolo GI TSYM : Intervalo símbolo TLONG : Duración de la secuencia del entrenamiento 80 64 48 4 52(NSD + NSP) 2 312.5KHz (20MHz/64) 3.2μs (1/ΔF) 8μs 0.8μs (TFFT /4) 1.6μs 4μs (TGI + TFFT) 8μs (TGI2 +2TFFT) El receptor realiza primero serie a paralelo conversión, luego elimina los prefijos cíclicos y luego realiza una FFT en la entrada. La señal resultante se pasa a través de un ecualizador de dominio de frecuencia [9], que utiliza los símbolos de la formación. Después de la igualación, los pilotos están separados de la señal y la señal pasa por un demodulador, deinterleaver y un decodificador de Viterbi. Este modelo de sistema también se utilizó para todas nuestras simulaciones. El modelo de simulación de la red fue creado en Simulink de MATLAB. La Fig. 1 muestra un escenario de red con un transmisor, un receptor y un n interferer que fue utilizada para los estudios de simulación. El tamaño de fotograma del transmisor se fijó en 32 símbolos OFDM cada fotograma, mientras que para conseguir el efecto de las colisiones entre los paquetes de diferentes tamaños, el 922 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 3, MAY 2013 marco tamaño de la n interferer fue elegido para ser distribuido uniformemente entre 1 y 32 símbolos. Los parámetros OFDM y sincronización relacionadas con parámetros para el modelo de simulación se dan en la Tabla 2. Para modelar los usuarios altamente móviles el simulador utiliza una máxima frecuencia doppler de 100 Hz. Consideramos que las tasas de datos de 12 Mbps (QPSK), 24 Mbps (16QAM) y 48 (64QAM) en nuestras simulaciones. Podemos fijar la probabilidad de colisiones en el simulador y el simulador puede etiquetar los paquetes involucrados en una colisión, que a su vez nos da control sobre nuestros experimentos. T −1 N −1 EVM RMS = | H i n n ,k + η n ,k + ζ n ,k − in ,k |2 n = 0 k =0 T ⋅ N ⋅ P0 . (4) III. EVM PARA DETECCIÓN DE COLISIONES En esta sección presentamos una métrica clave relacionados con la calidad del enlace inalámbrico que utiliza el mecanismo propuesto para la detección de colisiones. Consideremos un sistema OFDM con modulación BPSK. Suponiendo el escenario dado en la Fig. 1, una señal recibida después de pasar por un canal de desvanecimiento multitrayecto puede expresarse como (1) rn ,k = H n in ,k + η n ,k + ζ n ,k donde in,k es la nth dominio de tiempo OFDM transmitir símbolo subportadora k, rn,k es la nth dominio de tiempo OFDM recibió símbolo sobre subportadora k, Hn es el coeficiente de canal en el dominio de la frecuencia, mientras que ηn,k es el ruido blanco aditivo gaussiano (AWGN), y ζn es la interferencia debido a una colisión. Magnitud del vector de error (EVM) es ampliamente utilizada como una métrica de rendimiento para la calidad del enlace en los sistemas de comunicación digital [26]. EVM expresa la diferencia entre el valor de voltaje complejo esperado de un símbolo desmodulado y el valor del símbolo real recibido. EVM puede describirse como [3]: T −1 N −1 | r 2 − in ,k | n ,k EVM RMS = n = 0 k =0 (2) T ⋅ N ⋅ P0 donde P0 es la potencia media de los símbolos, T es el número de símbolos recibidos y N es el número de subportadoras. Ahora evaluemos EVM con la ayuda de dos casos. En primer lugar, en ausencia de cualquier colisiones desaparece el término interferencia (es decir, la colisión) en la ecuación (1). Sustituyendo esta expresión de la señal recibida rn,k en la ecuación (2), obtenemos T −1 N −1 EVM RMS = | H i n n ,k + η n ,k − in ,k |2 n =0 k =0 T ⋅ N ⋅ P0 . (3) Para obtener el EVM en presencia de colisiones, sustituimos la ecuación 1 en la ecuación 2, para obtener Figura 2. CDF de magnitud del Vector de Error. Figura 3. CDF de Error estalló longitudes. De las ecuaciones (3) y (4), es claro que el valor EVM para paquetes involucrados en una colisión será más alto que los otros paquetes (libre de errores o paquetes perdidos debido a errores de canal). Se trata de la intuición detrás utilizando EVM como una métrica para la detección de colisiones. Fig. 2 se muestra una comparación de la función de distribución acumulativa (CDF) de EVM para paquetes involucrados en colisiones y los paquetes que están libres de colisión. La Fig. 3 muestra la CDF de longitudes de ráfagas de error en la presencia y la ausencia de colisiones. Observando la Fig. 2 y Fig. 3, podemos concluir que los paquetes involucrados en una colisión tendrán valores más altos de EVM en comparación con los paquetes gratis de colisión. Esto motiva el uso de EVM en nuestra técnica para diferenciales los abordajes de errores de canal. EVM tiene muchas ventajas cuando se utiliza como una medida para la calidad del enlace: es fácil de obtener (señal de Vector pueden utilizarse analizadores), contiene información adicional sobre el error de fase y el error de amplitud, y se puede calcular incluso antes de que un paquete es completamente decodificado etc. AMAN AND SIKDAR : A CART BASED MECHANISM FOR COLLISION IV. MECANISMO DE DETECCIÓN DE COLISIONES BASADO EN UN CART En esta sección desarrollamos un mecanismo basado en CART para distinguir entre colisiones y errores de canal en IEEE 802.11. Una serie de cuatro mediciones se utiliza como insumos para el modelo de CART. Antes de que se presenta el modelo de CART para detección de colisiones, primero evaluamos la eficacia de cada métrica individualmente bajo varias configuraciones de red. A. Evaluación Métrica Esta sección evalúa la efectividad de diferentes medidas con el fin de la detección de colisiones, cuando se utilizan en modelos de CART. Puesto que el efecto de captura tiene un profundo efecto sobre el rendimiento de las técnicas de detección de colisión [3], evaluamos el rendimiento de las métricas bajo dos parámetros: efecto de captura de alta y baja captura. Efecto de la captura es un fenómeno en el que se suprime la transmisión de una señal atenuada por la transmisión de una señal fuerte. Esto significa que en presencia de captura de alto efecto, es decir, si ocurre una colisión entre una señal fuerte y una débil señal (atenuados debido a mayor distancia del receptor), la señal más fuerte seguirá siendo reconocible en el receptor y así detectar una colisión es un desafío. Sin embargo, en presencia de colisión del efecto de captura baja detección es menos difícil. Evaluamos la eficacia de una métrica basada en lo siguiente: (i) probabilidad de falsa alarma (PFA) - es decir, los casos donde una métrica predice un collison cuando realmente no había ninguna colisión (el paquete puede han sido corrompido por señal débil), (ii) la probabilidad de detección de la señorita (PMD) - es decir, los casos donde una métrica no predice ninguna colisión cuando realmente se produce una colisión (el paquete de interferencia puede ser demasiado débil como para afectar el paquete original) y (iii) la precisión - es decir, la fracción de paquetes que fueron clasificados correctamente. Consideramos EVM y tres otras métricas propuestas en [3], es decir, (1) proporción de error de bits por paquete (BERpp), (2) recibe la señal (RSS) que es la señal agregada más interferencia medido en dB y (3) errores por símbolo (EPS) que es el número promedio de bits de error entre todos los símbolos que están en error. Para cada categoría (alta y baja) del efecto de captura, creamos modelos de CART usando individualmente cada métrica y evaluar las tasas de missclassification para estos modelos. Nuestra evaluación de los parámetros de la cuatro se basa en simulaciones que se utilizaron para recopilar datos sobre colisiones en una red inalámbrica. El simulador que se describe en la Sección 2 se utiliza para simular 5474 paquetes (32 símbolos OFDM por paquete) para cada una de nuestras simulaciones. 1) Efecto de captura baja: Para crear escenarios con efecto de captura baja, utilizamos las topologías de simulación donde el transmisor y el n interferer son ambos a la misma distancia 923 del receptor. Así el escenario dado en la Fig. 1 se simula con d1 = d2, con las distancias que van desde 3m hasta 30m. Los modelos de CART entrenados utilizando los datos obtenidos de las simulaciones para cada una de las métricas in dividualmente se muestran en la Fig. 4. Figura 4. Modelos de CART métricas solo para baja captura de efecto. TABELA III PROPORCIÓN DE CLASIFICACIÓN ERRÓNEA - BAJO EFECTO DE CAPTURA Accuracy (%) PFA PMD BERPP RSS EPS EVM 94 70 98.7 97 1.34 10.5 46 14 1.2 1.4 1 5.5 La proporción de clasificación errónea asociadas con cada uno de los modelos de CART usados en la Fig. 4 se dan en la Tabla 3. La Tabla 3 muestra en presencia de captura bajo efecto, EPS y EVM pueden detectar colisiones con alta precisión y las bajas proporción de errores de clasificación. Podemos concluir que en este caso el uso de EVM es suficiente para la detección de colisión debido a sus ventajas sobre los otros indicadores, como se explica en la Sección 3. 2) Alto efecto de captura: Para crear escenarios con captura de alto efecto, utilizamos las topologías de simulación donde el transmisor y el n interferer están a diferentes distancias del receptor, con el n interferer situada a una distancia mayor del receptor en comparación con el transmisor. Así el escenario dado en la Fig. 1 se simula con d1 < d2, con d1 = 5m y desde 8m hasta 40m. Los modelos de CART entrenan utilizando los datos obtenidos de las simulaciones para cada una de las métricas individualmente en proporción de clasificación errónea se muestra en la Fig. 5. La Fig. 5 muestra que la captura el efecto aumenta (es decir, como d2 aumentos) la precisión de las mediciones reduce al tiempo que aumenta la tasa de missclassification. Observamos que la exactitud de EVM y EPS se mantiene por encima de 80%, mientras que la precisión de BER y RSS se deterioran mucho rápidamente. También podemos ver en la Fig. 4, que el PFA para EPS, RSS, EVM debajo del 10% en promedio y están inmóviles. Sin embargo, la PFA para RSS es monótonamente creciente con la distancia de la n interferer. 924 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 3, MAY 2013 aumentando así la probabilidad de mala detección de una colisión. El impacto del efecto de la captura en exactitud es sensible y no solo métrica tiene suficiente precisión para su uso por técnicas como la tasa de adaptación cuyo funcionamiento depende críticamente de la capacidad de diferenciar claramente entre la colisión y error de canal pérdidas relacionadas. Por lo tanto para mejorar la exactitud y safegaurd contra las debilidades de cualquier métrica individual, la siguiente sección propone un clasificador basado en una combinación de métricas. a) Precisión de mediciones individuales en la clasificación de paquetes. B. Propone Modelo de Detección de Colisión Los resultados de la Sección IV.A.1 y Sección IV.A.2 muestran que mientras que una métrica única modelo de CART es suficiente para la detección de colisión en presencia de captura bajo efecto, no puede detectar colisiones con eficacia en presencia de captura de alto efecto. Así que para mejorar la precisión y reducir los índices de error missclassification se propone un modelo de CART utilizando múltiples predictores. b) PFA de métricas de Individulal en la clasificación de paquetes. Figura 6. Clasificador propuesto. c) PMD de métricas de Individulal en la clasificación de paquetes. Figura 5. Proporción de clasificación errónea - alto efecto. La Fig. 4 muestra que la PMD aumenta monótonamente con la distancia de la interfiere para todas las métricas. Sin embargo, el PMD para RSS y BER aumentar a velocidad mucho mayor. El efecto de la distancia n interferer en PMD puede interpretarse de la siguiente manera: como la distancia de la fuente de interferencia de los aumentos del receptor, el efecto de la colisión se reduce, es decir, la señal más fuerte desde el transmisor suprime la transmisión de la interferencia; Utilizando los mismos datos de simulación obtenidos en la Sección IV.A.2, entrenamos un modelo de CART utilizando múltiples predictores (métricas), denotados por Xi, i = 1,···, 4 correspondientes a las cuatro métricas que se ha descrito anteriormente. El objetivo del modelo de CART es encontrar un conjunto de reglas que pueden utilizarse para determinar si el valor de una variable dependiente Y denotando si una pérdida de paquetes fue causada por una colisión o canal errores) de valores conocidos de las variables explicativas Xi, i = 1,···, 4. Usando nuestras simulaciones, en primer lugar ofrecemos un conjunto de datos iniciales para Xi donde la causa de la pérdida de paquetes, es decir, Y se etiqueta. Entonces construimos árboles usando estos datos iniciales y el objetivo de este proceso es maximizar la homogeneidad de los valores de la variable dependiente Y en las distintas particiones. Nuestro clasificador propuesto se muestra en la Fig. 6. AMAN AND SIKDAR : A CART BASED MECHANISM FOR COLLISION En la Fig. 6, se hace la primera decisión es sobre el valor de la EPS de un paquete. La métrica de la EPS no puede detectar colisiones en situaciones donde los errores (causados por una colisión) en un paquete pueden ser corregidos por el error corregir códigos (ECC). Esta situación se presenta cuando la transmisión de la n interferer se debilita por un desvanecimiento o atenuación (captura de alto efecto). Esto hace que el valor EPS a ser cero (o cercano a cero). Sin embargo EVM y RSS son dos parámetros que nos pueden dar una visión más clara sobre la situación. A diferencia de la EPS, EVM y RSS no se basan en bits que pueden ser "on" u "off". Por el contrario, EVM y RSS están más estrechamente relacionados a la dinámica del canal. Por otra parte, EVM da una mejor imagen de la distorsión del canal debido a sus propiedades que se discuten en la Sección 3. Así la rama izquierda del clasificador en la Fig. 6 utiliza RSS y EVM con el propósito de clasificar los paquetes que se ven afectados por el efecto de captura de alta. Por el contrario si el valor de la EPS de un paquete es mayor que cero, esto significa que el efecto de desvanecimiento o atenuación no es significativo en la transmisión de la n interferer y el número de errores causados por la colisión será suficiente para darnos valores anormalmente altos de RSS y EPS. Así el clasificador utiliza RSS y EPS para clasificar los paquetes que se ven afectados por la baja captura moderado efecto (rama derecha de la Fig. 6). C. Resultados En esta sección presentamos los resultados de la simulación para evaluar el rendimiento del CART propuesto basada en el mecanismo de detección de colisión y compararlo con el estado del arte en la literatura para la detección de colisiones. Para nuestra comparación, utilizamos el esquema propuesto en [3] que utiliza las siguientes tres métricas: RSS, BER y EPS. El método propuesto en [3] utiliza una métrica votar, es decir, si cualquiera de las métricas indica una colisión, el algoritmo deduce una colisión. La proporción de clasificación errónea utilizando nuestro clasificador propuesto, así como el clasificador presentado en [3] se muestran en la Fig. 7. Estos resultados corresponden a los escenarios de captura de alto efecto. Puesto que una sola métrica es suficiente para los escenarios de captura bajo efecto, los resultados para estos escenarios son triviales. La Fig. 7 muestra que el clasificador de CART base propuesto entrenado usando múltiples métricas da alta precisión manteniendo las proporción de clasificación errónea baja. También observamos que el esquema propuesto supera el clasificador presentado en [3]. Observamos que mientras PMD es una medida importante, PFA tendrá un efecto más profundo en el rendimiento de detección collison. Una mayor PFA resultará en un aumento en el número de backoffs y retransmisiones. Por lo tanto, nos gustaría mantener PFA en un nivel bajo. Los resultados muestran que hay una reducción significativa de las falsas alarmas y una mejora significativa en la precisión con el clasificador propuesto como el aumento del efecto de captura. 925 a) Precisión del clasificador propuesto y [3]. b) PFA de clasificador propuesto y [3]. c) PMD de clasificador propuesto y [3]. Figura 7. Proporción de clasificación errónea para el clasificador propuesto y clasificador propuesto por [3]. V. CONCLUSIONES Este trabajo propone una metodología de base del árbol de clasificación y regresión para determinar si una pérdida de paquetes en redes IEEE 802.11 fue causada por errores de canal o debido a una colisión con otra transmisión simultánea. La metodología propuesta utiliza un vectores de cuatro indicadores relacionados con la calidad de la canal como entrada al clasificador para minimizar los errores de clasificación. Resultados de la simulación se utilizan para evaluar el desempeño de los mecanismo de detección de colisión propuesto y verificar su funcionamiento superior sobre clasificadores existentes. 926 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 3, MAY 2013 RECONOCIMIENTO Los autores desean dar las gracias a Linda Rivera por su ayuda con la traducción del documento del Inglés al Español. REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] [9] J. Bicket, Bit-rate selection in wireless networks, Master’s Thesis, Massachusetts Institute of Technology, Boston, MA, USA, 2005. A. Joshi, and P. Kulkarni, “Vehicular WiFi Access and Rate Adaptation,” Proc. ACM SIGCOMM, pp. 423-424, New Delhi, Inida, August 2010. S. Rayanchu, A. Mishra, D. Agrawal, S. Saha, S. Benerjee, “Diagnosing Wireless Packet Losses in 802.11: Separating Collision from Weak Signal,” Proc. IEEE INFOCOM, pp. 735-743, Phoenix, AZ, April 2008. J. Kim, S. Kim, S. Choi, and D. Qiao, “CARA: Collision-aware rate adaptation for 802.11 WLANs,” Proc. IEEE INFOCOM, Barcelona, Spain, March 2006. S. Wong, H. Yang, L. Lu, and B. Bhargavan, “Robust Rate Adaptation in 802.11 Wireless Networks,” Proc. ACM MOBICOM, pp. 146-157, Los Angeles, CA, September 2006. M. Khan, and D. Veitch, “Isolating Physical PER for Smart Rate Selection in 802.11,” Proc. IEEE INFOCOM, pp. 1080-1088, Rio de Jeneiro, Brazil, April 2009. IEEE Standard 802.11a-1999, High-speed Physical Layer in the 5 GHz Band, 1999. W. Jakes, Microwave Mobile Communications, IEEE press, 1974. S. Shooshtary, Development of a MATLAB simulation environment for vehicle-to-vehicle and infrastructure communication based on IEEE 802.11p, Master’s Thesis, University of Gävle, Gävle, Sweden, 2008. Muhammad N. Aman was born in Peshawar, Pakistan, in 1983. He received the B.Sc. degrees in computer systems engineering from the NWFP University of Engineering and Technology, Peshawar, Pakistan in 2006 and the M.Sc. degree in computer engineering from Center for Advanced Studies in Engineering, Islamabad, Pakistan, in 2008. He received the M.Engg. degree in industrial and management engineering and the Ph.D. degree in electrical engineering from Rensselaer Polytechnic Institute, Troy, NY, in 2012. From 2006 to 2009, he was a Lecturer with the Telecom Engineering Department, FAST-National University of Computer and Emerging Sciences, Peshawar, Pakistan. Since December 2012, he has been an Assistant Professor with the Electrical Engineering Department, FASTNational University of Computer and Emerging Sciences, Peshawar, Pakistan. His research interest includes the design of protocols for wireless networks using cross layer information. His research interests also include optimization and agent based simulation methods. Dr. Aman was a recipient of the Fulbright Award in 2008. Biplab Sikdar (S’98-M’02-SM’09) received the B. Tech degree in electronics and communication engineering from North Eastern Hill University, Shillong, India, the M. Tech degree in electrical engineering from Indian Institute of Technology, Kanpur and Ph.D in electrical engineering from Rensselaer Polytechnic Institute, Troy, NY, USA in 1996, 1998 and 2001, respectively. He is currently an Associate Professor in the Department of Electrical, Computer and Systems Engineering of Rensselaer Polytechnic Institute, Troy, NY, USA. Dr. Sikdar is a member of IEEE, Eta Kappa Nu and Tau Beta Pi and is an Associate Editor of the IEEE Transactions on Communications.