Identificación usando Bases Ortonormales Identificación
Anuncio

Identificación usando
Bases Ortonormales
Juan Carlos Gómez
Laboratory for System Dynamics and Signal Processing
Facultad de Ciencias Exactas, Ingeniería y Agrimensura
Universidad Nacional de Rosario, Argentina
E-mail: jcgomez@fceia.unr.edu.ar
Contenido
•
•
•
•
•
•
ISIS
Introducción
Bases Ortonormales
Identificación usando bases ortonormales
Análisis asintótico de las estimas
Ejemplos de Simulación
Comentarios Finales
Identificación usando Bases
Ortonormales
2
Introducción
• Las estructuras de tipo caja negra en general no permiten
incorporar información 'a priori' sobre la dinámica del sistema.
Excepción
Uso de Bases ortonormales
• El uso de Bases Ortonormales permite disminuir el orden de los
modelos manteniendo el grado de aproximación de los mismos.
• Permiten cuantificar los errores por dinámica no modelada, y
debido a las perturbaciones. Es posible realizar un análisis
asintótico de las estimas similar al existente para modelos FIR
(Ljung & Yuan).
• Los modelos con Bases Ortonormales son aptos para estimación
con mínimos cuadrados (algoritmos robustos, reducida carga
computacional).
ISIS
Identificación usando Bases
Ortonormales
3
• Es posible extender los resultados a sistemas multivariables
(Gómez, 1998).
• Es posible obtener realizaciones mínimas en espacio de
estados de los sistemas representados con Bases
Ortonormales.
• Es posible extender los métodos de identificación para
algunas clases de sistemas no lineales (Gómez & Baeyens,
2000).
• Se ha desarrollado una teoría rica, con muchas aplicaciones.
ISIS
Identificación usando Bases
Ortonormales
4
Bases Ortonormales
• Espacios funcionales
Consideraremos espacios funcionales con estructura de
espacio de Hilbert (espacios con producto interno que son
completos con respecto a la métrica inducida por la norma
inducida por el producto interno), asociados a las funciones
transferencia racionales de sistemas en tiempo discreto,
causales y estables.
L 2 (T ) : espacio de funciones cuadrado (Lebesgue)
integrables en la circunferencia unitaria en el plano complejo
T = {z : z = 1}. Es un espacio de Hilbert cuando se lo equipa
con el producto interno
ISIS
Identificación usando Bases
Ortonormales
5
1
F,G =
2π
π
( )( )
jω
jω
F
e
G
e
dω
∫
−π
producto interno
O equivalentemente
F,G =
( )
1
1 dz
F
z
G
(
)
z z
2πj ∫T
producto interno
H 2 (T ) : el espacio de Hardy (con estructura de Hilbert) de
funciones cuadrado (Lebesgue) integrables en la
circunferencia unitaria, que son analíticas en el exterior del
disco unitario D = z : z < 1 .
{
ISIS
}
Identificación usando Bases
Ortonormales
6
Es un subespacio propio de L 2 (T ) con la misma definición de producto interno.
Este espacio puede pensarse como el 'espacio de las funciones transferencia racionales en tiempo discreto, causales y estables' .
• Bases Ortonormales
{Β k (q)}k =0
∞
es una base ortonormal del espacio de Hilbert H 2 (T )
si es un conjunto ortonormal completo, i.e. si verifica
B k , B ! = δ k!
con
ISIS
δ k!
la delta de Kronecker, y además
Identificación usando Bases
Ortonormales
7
(
)
span {B k (q )}k =0 = H 2 (T )
∞
(genera todo el espacio)
Esto implica que cualquier función del espacio
G (q )∈ H 2 (T )
tiene una representación única de la forma
∞
G (q ) = ∑θ k B k (q )
(1)
k =0
donde
ISIS
θ k = G, Bk .
Identificación usando Bases
Ortonormales
8
Identificación usando Bases Ortonormales
La estructura de modelo es
y (n ) = G (q )u (n ) + υ (n )
(2)
donde υ (n ) es una perturbación, que se considerará un proceso
aleatorio.
G(q) es representada como una expansión en bases ortonormales de
la forma (1). Obviamente, como G(q) es desconocida, los coeficientes de la expansión no puede calcularse según θ k = G , B k .
El objetivo es entonces estimar los parámetros de un modelo de
dimensión finita
ISIS
Identificación usando Bases
Ortonormales
9
p −1
G (q ) = ∑θ k B k (q )
(3)
k =0
de manera que una estima de G(q) vendrá dada por
( )
p −1
G q,θˆ = ∑θˆk B k (q )
donde
(4)
k =0
θˆk es una estima de θ k .
La estructura de modelo (2),(4) puede escribirse en la forma de
regresor lineal
y (n ) = ϕ T (n )θ + υ (n )
ISIS
Identificación usando Bases
Ortonormales
(5)
10
definiendo
ϕ T (n) = [B0 (q )u (n), B1 (q )u (n), " , B p −1 (q )u (n)]
θ = [θ 0 θ1 " θ p −1 ]
T
La estimación puede hacerse usando el método de mínimos cuadrados, que en este caso tiene una solución analítica. La estima de mínimos cuadrados (LSE) resulta
−1
N
T
θˆN = argmin{VN (θ )}= ∑ ϕ (k )ϕ (k ) ∑ ϕ (k ) y (k )
θ
k =1
k =1
N
(6)
donde VN (θ ) es un criterio cuadrático en los errores de predicción
1
VN (θ ) =
N
ISIS
∑ Tr {[y(k ) − ϕ
N
T
][
T
(k )θ y (k ) − ϕ (k )θ
k =1
Identificación usando Bases
Ortonormales
]}
T
(7)
11
Algunas Bases Ortonormales en H 2 (T )
• Modelo FIR
En este caso es
Bk (q) = q
−k
Es decir, tienen polos en el origen del plano Z.
Nota: Si el sistema tiene una respuesta al impulso de larga duración
se necesita un gran número de términos de la expansión en serie para
representarlo adecuadamente.
ISIS
Identificación usando Bases
Ortonormales
12
• Bases de Laguerre
Están definidas como:
1−ξ 2
Bk (q ) =
q −ξ
1 − ξq k
q − ξ
k ≥0
donde ξ ∈ ℜ, ξ < 1 es un parámetro real denominado coeficiente de
Laguerre. Las bases tienen un único polo real con multiplicidad.
• Bases de Kautz
ISIS
k −1
2
2
2
(1 − a )(1 − c ) cz − a(c + 1) z + 1 2
2
2
B k ( z ) = z − a(c + 1) z + c z − a (c + 1) z + c k
(1 − c 2 ) ( z − a ) cz 2 − a (c + 1) z + 1 2
2
2
z − a (c + 1) z + c z − a (c + 1) z + c
Identificación usando Bases
Ortonormales
k impar
k
par
13
donde − 1 < a < 1 , − 1 < c < 1 , k ≥ 0 . Notar que los polos son complejos conjugados, con multiplicidad. Las bases permiten incluir
información a priori que uno pueda tener de la dinámica del sistema
seleccionando adecuadamente los parámetros a y c.
• Bases Generalizadas
1− ξ
k
B k (q ) =
q − ξk
2
k −1
1 − ξi q
∏ q − ξ
i =0
i
k ≥0
Permiten la incorporación de polos arbitrarios sin la necesidad de repetición periódica. Las bases FIR, Laguerre, y Kautz son casos particulares
de estas bases.
ISIS
Identificación usando Bases
Ortonormales
14
• Bases Generadas por “inner functions”
Definición: Una función transferencia racional G(z) se denomina
inner si es estable y satisface
( )G(z ) = 1
Gz
−1
Es decir, si es estable y all pass.
Sea Gx (z ) una inner function con grado de McMillan nx , y con
una realización mínima balanceada (A, B, C, D) . Denotemos
Vk (z ) = z (zI − A) BG xk (z )
−1
Entonces la secuencia de funciones transferencia racionales
{B (z )}= {e
i ,k
i
T
}
Vk (z )
constituye una Base Ortonormal en H 2 (T ).
ISIS
Identificación usando Bases
Ortonormales
i = 1, ", nx
k = 0," , ∞
15
Análisis Asintótico de las Estimas
El error de estimación (en el dominio frecuencial) puede escribirse como
(
)
(
)
G e jω ,θˆ − G (e jω ) = G e jω ,θˆ − G (e jω ,θ ∗ )+ G (e jω ,θ ∗ )− G (e jω )
&###%###$ &##
#%###
$
variance
bias
donde θ ∗ es el valor al cual converge θˆ cuando el número de datos
N → ∞ . Pueden reconocerse dos términos:
• Error debido al ruido (variance error)
(
)
G e jω ,θˆ − G (e jω ,θ ∗ )
que usualmente se cuantifica con la media (cuadrática) muestral
(
)
2
jω ˆ
jω
E G e ,θ − G (e ,θ ∗ )
ISIS
Identificación usando Bases
Ortonormales
16
Para evitar la influencia de error por dinámica no modelada se suele
hacer un análisis asintótico donde ambos, el orden del modelo y el
número de datos, se hacen tender a infinito.
• Error por dinámica no modelada (bias error, o undermodelling error),
debido a que la estructura de modelo es muy simple para representar el
sistema real
(
jω
) ( )
G e ,θ ∗ − G e
jω
Se suele cuantificar a traves de una cota superior de su módulo.
ISIS
Identificación usando Bases
Ortonormales
17
• Error debido al ruido
Bases FIR
Un "famoso" resultado de Ljung establece que para N (número de
datos) y p (orden del modelo) altos, entonces
p Φυ (ω )
var G e jω ,θˆ ≈
N Φ u (ω )
{(
)}
Para el caso multivariable (Ljung & Yuan)
cov {g (e
ISIS
jω
)}
p
−1
ˆ
,θ ≈ Φ u (ω ) ⊗ Φυ (ω )
N
Identificación usando Bases
Ortonormales
18
Bases Generalizadas
1− ξ
k
B k (q ) =
q − ξk
2
k −1
1 − ξi q
∏ q − ξ
i =0
i
k ≥0
Resultado "no tan famoso" de Ninness et al., establece
γ p (ω ) Φυ (ω )
ˆ
var G e ,θ ≈
N Φ u (ω )
{(
)}
jω
2
p −1
jω
B
(
e
(
)
γ
ω
=
donde p
∑ k ) es el "reproducing kernel" de las
bases.
k =0
Para el caso multivariable, un resultado "aún menos famoso" de
Gómez (1998) establece
γ p (ω ) −1
ˆ
cov g e ,θ ≈
Φ u (ω ) ⊗ Φυ (ω )
N
{(
ISIS
jω
)}
Identificación usando Bases
Ortonormales
19
Comentarios
• Hay aquí un nuevo fenómeno (no presente en el caso FIR) que
indica que el error depende de la ubicación2 de los polos de las
p −1
bases, a través del factor γ p (ω ) = ∑ B k (e jω ) , que es también
k =0
función de la frecuencia.
• Para estas bases, estos resultados no pueden probarse a partir de los
resultados de Ljung para el caso FIR, ya que las bases no presentan
la propiedad de grupo
B k B ! = Bk +!
que presentan las bases FIR.
ISIS
Identificación usando Bases
Ortonormales
20
Ejemplo de Simulación
! Proceso: Motor de Corriente Continua con excitación independiente constante (revisitado)
τm
La
i(t)
+
ε(t)
u(t)
-
ω
τc
Conversión Electromecánica
J
b
ε = kω
τ m = ki
! Estructura de Modelo
Kω n2
ω (s )
= 2
G (s ) =
U (s ) s + 2ξω n s + ω n2
ISIS
b1 z −1 + b2 z −2
G (z ) = ZOH{G (s )}=
1 + a1 z −1 + a 2 z −2
Identificación usando Bases
Ortonormales
21
! El sistema “real”
La = 2.5 mHy
Ra = 0.062 Ω
b = 1.275 Nms
G (s) =
k = 6.6 Nm/A
J = 30 Nms 2
87.99
Sistema Real (FT)
2
s + 1.3370s + 580.821
Equivalente ZOH (Ts = 10-4 seg)
−6
0.4399 ×10 ( z + 1)
G ( z ) = ZOH{G ( s )} = 2
z − 1.9999 z + 0.9999
ISIS
Identificación usando Bases
Ortonormales
22
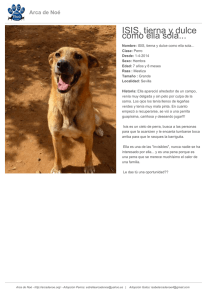
! Datos de Entrada-Salida
Entra da
20
10
0
-10
-20
0
0.2
0.4
0.6
0.8
1
0.6
0.8
1
Sa lida
10
5
0
-5
-10
0
0.2
0.4
Tie mpo
Figura 1: Datos de entrada-salida
ISIS
Identificación usando Bases
Ortonormales
23
! Elección de las Bases
Se adopta una estructura de modelo con bases ortonormales de
Kautz, y se consideran solamente dos términos en la expansión en
series (2) (esto significa que identificaremos un modelo de segundo
orden, con polos complejos conjugados). Los dos primeros
elementos de las bases de Kautz resultan:
1 − c 2 ( z − a)
B0 ( z ) = 2
z − a (c + 1) z + c
(1 − c 2 )(1 − a 2 )
B1 ( z ) = 2
z − a (c + 1) z + c
Se adoptan los siguientes valores de los parámetros a y c de las
bases
a = 0.9997
c = 0.99997
ISIS
Identificación usando Bases
Ortonormales
24
Con estos valores, la estima de mínimos cuadrados del vector de
parámetros resulta:
- 0.0275
ˆ
θN =
0.4821
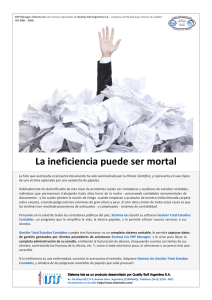
La figura (2) muestra la salida medida (en línea llena roja) y la
correspondiente salida estimada (en línea de trazos azul).
0
0
ISIS
0
0
0
0
Identificación usando Bases
Ortonormales
Figura 2: Salida medida
(línea llena roja) y salida
estimada (línea de trazos
azul).
25
Comentarios Finales
Consideremos el caso de una estructura con polos fijos, de la forma
( )
C q,θˆ
y (n ) = G (q )u (n ) + υ (n ) =
u (n ) + υ (n )
D(q )
donde los polos de D(q) son fijos y conocidos. Podemos escribir
( )
( )
1
ˆ
y (n ) = C q,θ
u (n ) + υ (n ) = C q,θˆ u~ (n ) + υ (n )
D(q )
y entonces interpretarlo como un problema de estimación de un
modelo FIR con la entrada pre-filtrada por 1
D (q )
Luego, podríamos concluir que
p Φυ (ω )
ˆ
var C e ,θ ≈
N Φ u~ (ω )
{(
ISIS
jω
)}
Identificación usando Bases
Ortonormales
26
con
Φ u~ (ω ) =
Φ u (ω )
D (e
jω
) . Es decir
2
{(
)}
var C e ,θˆ ≈
jω
( )
pD e
jω
2
N
Por lo que podríamos concluir que
{(
)}
var G e ,θˆ ≈
jω
1
( )
De
jω
2
Φυ (ω )
Φ u (ω )
p Φυ (ω )
ˆ
var C e ,θ ≈
N Φ u (ω )
{(
jω
)}
y entonces la varianza no dependería de la ubicación de los polos. Este
razonamiento es sin embargo erróneo, ya que el filtro D e jω está
cambiando a medida que el orden p se incrementa, y por lo tanto el
espectro Φ u~ ω
también está cambiando con p, y estaríamos
aplicando el resultado de Ljung para FIR que fue derivado asumiendo
un espectro fijo de la entrada.
( )
( )
ISIS
Identificación usando Bases
Ortonormales
27