1.- INTRODUCCIÓN GENERAL ARAN Cada ARAN puede ser
Anuncio

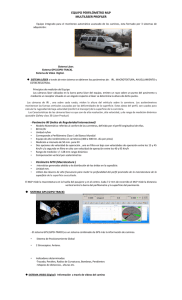
1.- INTRODUCCIÓN GENERAL ARAN Cada ARAN puede ser equipado con una combinación de siete tipos de equipos que se comunican y trabajan juntos a través de una red. La mayoría de los subsistemas son opcionales, pero el CDAC es un componente necesario en el ARAN. Computador de Adquisición de Datos Central (CDAC) El CDAC es el componente central de una red de ARAN. Recolecta, organiza y almacena los datos recogidos por los siguientes subsistemas: Computador Central de Adquisición de Datos (CDAC) – Obligatorio (ARAN DLNV) Computador Controlador Smart Video (SVC) – Registro Fotográfico Nodo de Textura – Macrotextura (ARAN DLNV) Nodo de Rugosidad o Laser SDP – IRI (ARAN DLNV) Digital Video sub-sistema (DVS) – Registro Video Digital Posición y orientación del sub-sistema para vehículos – GPS Computador LRMS Smartbar – Ahuellamiento (ARAN DLNV) 2.- PARÁMETROS MEDIDOS POR ARAN LNV 2.1 IRI Dos láseres, uno sobre cada rueda, miden la altura del vehículo sobre la carretera. Los acelerómetros monitorean las fuerzas verticales causadas por las deformidades de la superficie. Estos datos del perfil, son usados para calcular la rugosidad de baja-velocidad (confort al manejar) de la superficie de la carretera. El Índice Internacional de Rugosidad (IRI) y otros índices son calculados instantáneamente, una característica que aminora significativamente tiempo y esfuerzo a la hora de procesar la información en la oficina. Los datos son también grabados para cualquier procesamiento posterior si se desea. El Láser también cumple o excede las especificaciones para una clasificación de Clase I de la ASTM (American Society for Testing Materials), el cual es, nuevamente, el mas alto nivel de rendimiento posible. 2.2 Ahuellamiento El láser perfilador transversal es un subsistema montado sobre el vehículo que utiliza dos láseres de lectura para medir con exactitud el perfil transversal del pavimento. El perfil transversal es medido para calcular la profundidad de las deformaciones del camino. Al medir el perfil completo en vez de apenas de las roderas, el efecto ambulatorio del vehículo en los valores medidos de roderas es eliminado. El láser utiliza dos dispositivos laser-basados sincronizados para medir el perfil transversal de un solo carril de 4 metros (13pies) de ancho. El subsistema del láser XVP tiene una resolución lateral de aproximadamente 1.280 puntos y una frecuencia de muestreo de 20hertzios (E.j.: el perfil transversal del camino se muestrea cada 1.1 m a una velocidad de 80 kilómetros/hora o 3.7 pies a una velocidad de 50 mph.) Los 1.280 puntos registrados de la información bruta se filtran para producir un perfil transversal de 40 puntos. Los puntos de la información bruta pueden también ser registrados separadamente. 2.3 Macrotextura El subsistema de Smart Texture es un módulo montado en el vehículo que utiliza láseres de alta frecuencia para medir la profundidad del perfil promedio de la macrotextura de la superficie de la carretera. Los datos de la textura son una medida importante para el drenaje y la resistencia al deslizamiento de la superficie del pavimento. Durante el proceso de colección de información, el operador puede revisar los datos de textura en tiempo real. El procesamiento de la estación de trabajo permite revisar detalladamente los perfiles de la textura o resúmenes estadísticos de aplicaciones de manejo de pavimentos. El modulo de Smart Texture consiste de uno o mas láseres de 64 kHz, de un sistema electrónico de condicionamiento de señal y de un computador. El sistema puede adquirir la macrotextura a velocidades de hasta 100 km/h (60mph).