Control Digital de velocidad de un Motor DC
Anuncio

Control de Velocidad Digital PID de un Motor DC de Escobillas
Autor: Ing. Carlos Narváez
Universidad de Oriente
email: cnarvaez@udo.edu.ve
Introducción
En el presente trabajo se desarrolla un Control de velocidad en lazo cerrado de un motor DC de
Escobillas aplicando el conocido algoritmo de control PID. El objetivo es mantener constante la
velocidad ante variaciones de la carga (perturbaciones), de manera automática.
El sistema se realizó usando un motor DC de escobillas extraído de una impresora de
inyección de tinta, el cual es controlado por un H-bridge basado en un chip LMD18200 que
permite usando la técnica PWM variar la velocidad del motor y su sentido de giro. Como unidad
de realimentación, se utiliza un tacómetro construido como se detalla más adelante y todo el
sistema es controlado por un microcontrolador PIC18F452.
Sistema de Control de Lazo Cerrado
Tal como se muestra en la fig. 1, el sistema consta de un pequeño motor DC de escobillas,
cuya sección de potencia la constituye un H-Bridge que permite, por un lado, definir la dirección
de giro y por otro, controlar la velocidad con la aplicación de una señal PWM. El lazo de control
es cerrado usando un tacómetro construido con un disco de acetato codificado colocado en el
eje del motor y el cual se hace pasar por un foto interruptor, para producir así pulsos cuya
cantidad por unidad de tiempo es proporcional a la velocidad de giro del motor.
Fig. 1 Control de Lazo Cerrado
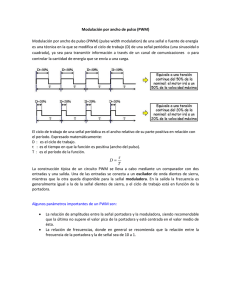
Modulación de Ancho de Pulso (PWM)
Es el mecanismo utilizado para variar la velocidad de un motor DC de escobillas. Consiste en
variar la anchura de pulso o el duty cycle en un ciclo de PWM de manera de variar el average
de la tensión DC aplicada al motor, tal como muestra la fig. 2.
Carlos A. Narváez V, 2008
Fig. 2 Modulación de Ancho de Pulso
PWM es una manera eficiente, para simular un rango de valores análogos usando circuitos
digitales. Switchando rápidamente entre cero voltios y el voltaje nominal del motor, se obtiene
un valor promedio comprendido entre esos dos límites. Tres señales son presentadas en la
figura arriba, todas tienen la misma frecuencia, pero el ancho de los pulsos son diferentes.
Variando la duración del tiempo “on”, el motor puede ver un promedio de cualquier valor entre
0V y +V. Frecuencias recomendadas para PWM están entre 20 y 30 Khz.
H-Bridge
El H-Bridge es básicamente un mecanismo para hacer girar un motor DC en dirección hacia
adelante y en reversa. Un H-Bridge típico de motores DC de escobillas es el integrado
LMD18200 de Nacional Semiconductors el cual puede suministrar continuamente hasta 3 Amp
VS
.1uf
10nf
Vs
Dir
PWM
Brake
Ground
Sense
B1
Out1
Out2
B2
TFO
LMD18200
1
2
10
11
A
9
-
+
10nf
2
6
3
5
4
7
8
1
U1
MOTOR DC
Fig. 3 H-Brigde LMD18200
Carlos A. Narváez V, 2008
y opera con suministro de voltaje de hasta 55 Voltios. Tiene protección contra sobrecarga, sus
entradas son compatibles TTL y CMOS. Usa PWM para regular la velocidad del motor y tienes
pines para las funciones de: freno, dirección, sensor de corriente y señal de advertencia de
temperatura.
El pin sense sirve de sensor de corriente de salida. Tiene una sensibilidad de 377
microamperio por amperio de corriente de salida. Usando una resistencia de 2.7K se tiene
0.999 Voltios por amperio de salida. El pin TOF es una señal de advertencia de temperatura.
Es una salida colector abierto que se vuelve ¨0¨ a 145 grados centígrados. El pin Brake realiza
un freno de emergencia del motor cuando este pin pasa a ¨1¨y el pin PWM también.
El LMD18200 puede manejar señales PWM del tipo Signo-Magnitud y Locked-antiphase las
cuales se describen a continuación.
PWM Locked-antiphase
La Señal PWM de tipo Locked-antiphase, consiste en un única señal de anchura de pulso
variable en la cual se codifica tanto la información de dirección como la de amplitud. El 50% de
la anchura de pulso representa cero. Valores por debajo del 50% representan dirección reversa
y valores por encima del 50% representan dirección hacia adelante del motor. Para el
LMD18200 el uso de este tipo de señal PWM implica usar el pin 3 (DIR) como entrada de la
señal PWM, mientras el pin 5 (PWM) se lleva a valor lógico 1.
Una de las grandes ventajas de usar señales PWM del tipo locked-antiphase es que sólo se
necesita una línea I/O para controlar completamente el motor. Si se tiene restricciones de
líneas I/O, esta puede ser una buena opción.
PWM Signo Magnitud
Si se usa señal PWM del tipo signo-magnitud, el microcontrolador establece la dirección de giro
del motor a través de un pin del H-Brigde destinado para tal fin (Dir) y varia la cantidad de
potencia aplicada al motor o duty-cicle con otro pin del H-Brigde denominado PWM. La
ausencia de pulso o lógica 0 en forma continua representa cero y lógica 1 en forma continua
representa 100%. Este tipo de señal, por su sencillez, se ha usado en la realización del
presente trabajo.
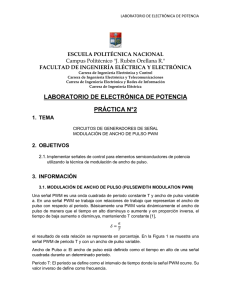
Implementando Modulación de Ancho de Pulso (PWM) en un PIC
Para obtener una señal PWM, se usa el timer2, el cual establece la frecuencia de la señal
PWM cargando un valor en el registro PR2. El ciclo se inicia con un reset, donde timer2 pasa a
cero, luego se va incrementando hasta que su valor iguale a PR2, momento en que ocurre un
nuevo reset y así sucesivamente. La anchura del pulso ó el tiempo que la señal permanece a 1
(duty cycle), viene dado por el valor cargado en el registro CCPR1L:CCP1CON<5:4> (8bits ó
10bits). Así cuando ocurre un reset del timer2, el pin de salida PWM pasa a 1, luego cuando
timer2 iguale el valor cargado en el registro CCPR1L:CCP1CON<5:4>, el pin de salida PWM
pasa a 0. El timer2 continua su conteo hasta que iguale a PR2 y un nuevo reset ocurre.
Carlos A. Narváez V, 2008
Fig. 4 Ciclo PWM
La fig. 4 muestra un ciclo de una señal PWM. La instrucción setup_ccp1(CCP_PWM) configura el
módulo CCP1 como PWM, entonces la patita RC2/CCP1, funciona como salida PWM. El
periodo de duración de un ciclo de PWM esta determinado por el valor cargado en PR2 según
la fórmula:
PWM_Periodo=(1/clock)*4*t2div*(PR2+1)
PR2=((PWM_periodo*clock)/(4*t2div))-1
y la anchura de pulso (duty cycle) o tiempo que la señal PWM esta alta durante cada ciclo,
viene dada por la formula:
Duty_cycle= value*t2div*(1/clock)
si value es LONG INT y
Duty_cycle= value*t2div*4*(1/clock)
si value es INT.
Donde value es el valor cargado en CCPR1L:CCP1CON<5:4> (8bits ó 10bits).
El Duty Cycle puede se establecido usando la instrucción:
set_pwm1_duty(value);
La instrucción:
Setup_timer_2(mode, P, postscale)
permite establecer el periodo del PWM dado un valor de PR2 entre 0 y 255. Este valor
determina cuando timer2 se resetea iniciando así un ciclo de PWM. Postscale es un número
entre 1 y 16 que determina cuantas veces el timer2 se resetea antes de ocurrir una
interrupción.
Carlos A. Narváez V, 2008
Ejemplo:
Si clock = 20MHZ y PR2 = 127, entonces, un ciclo de PWM dura:
Periodo = 1/20000000)*4*1*128 =
25.6 us
Luego usando la instrucción:
setup_timer_2(T2_DIV_BY_1, 127, 5);
Tenemos que Timer2 se incrementa cada 200nseg, reset cada 25.6 useg y genera una
interrupción cada 25.6 * 5 = 128 useg.
Además si hacemos PR2 igual a 100, un valor de 45 en CCPR1L crea un duty cycle de 45%,
un valor de 65 en CCPR1L crea un duty cycle de 65%.
Tacómetro digital
El tacómetro se construyó usando un foto-interruptor CNZ1021 a través del cual se hace pasar
un disco de acetato codificado colocado en la parte posterior del eje del motor. La fig. 5
muestra un disco codificado de 12 pulsos/rev. Los pulsos emitidos se hacen pasar por el Smithtrigger 7414 y realimentados al microcontrolador para así calcular la velocidad de rotación del
motor.
Fig. 5 Disco Codificado 12 Pulsos/revolución
La fig. 6, muestra el circuito del tacómetro construido utilizando un foto-interruptor CNZ1021 y
un acondicionador de señal Smith Trigger 7414.
+5VDC
180
10K
7414
1
2
Señal
CNZ1021
Fig. 6 Tacómetro
Carlos A. Narváez V, 2008
Implementando un Control PID
La acción de control PID en controladores analógicos esta dada por:
t
de(t )
1
u (t ) = K e(t ) + ∫ e(t )dt + Td
Ti 0
dt
(1-1)
Donde e(t) es la entrada al controlador (señal de error), u(t) es la salida del controlador, K es la
ganancia proporcional, Ti es el tiempo integral (o tiempo de reajuste) y Td es el tiempo
derivativo (o tiempo de adelanto).
Para obtener la función de pulso del controlador PID digital, se puede discretizar la ecuación
1.1 aproximando el término integral mediante la sumatoria trapezoidal y el término derivativo
mediante diferencias de dos puntos, así se obtiene:
T
T
(1 − Z −1 )
+
+ Td
U ( Z ) = K 1 −
E (Z )
−1
T
2Ti Ti (1 − Z )
(1.2)
ó
U (Z )
Ki
= Kp +
+ Kd (1 − Z −1 )
−1
E (Z )
1− Z
(1.3)
donde:
Kp = K −
Ki =
KT
Ki
=K−
2Ti
2
KT
Ti
Kd =
KTd
T
Ganancia Proporcional
Ganancia Integral
Ganancia Derivativa
y T es el periodo de muestreo.
Carlos A. Narváez V, 2008
Nótese que la ganancia proporcional para el controlador PID digital es más pequeña que la
ganancia K para el controlador PID analógico por un factor de Ki/2.
La ecuación 1.3 puede ser realizada utilizando programación paralela como indica la figura 7.
Ki
p(kT)
+
+
T
+
e(kT)
u(kT)
Kp
+
+
Kd
T
-
q(kT)
Fig. 7 Realización paralela de un controlador PID
Se puede implementar en un computador digital usando el siguiente seudo-código:
BEGIN
DO FOREVER
END
Obtenga el set point:
Obtenga la salida del sistema:
Calcule el error:
Calcule el término I:
Calcule el término D:
Calcule la Salida PID:
Envíe control al motor
r(kT)
y(kT)
e(kT)=r(kT)–y(kT)
P(kT)=Ki.e(kT)+p(kT-T)
q(kT)=Kd.e(kT)–Kd.e(kT-T)
u(kT)=p(kT)+Kp.e(kt)+q(kT)
Guarde variables:
p(kT-T)=p(kT)
e(kT-T)=e(kT)
Espere hasta próximo periodo de muestreo
ENDDO
Carlos A. Narváez V, 2008
Sintonización de los parámetros del PID
Conociendo el modelo matemático del motor, es decir su función de transferencia de lazo
abierto, podemos aplicar numerosos métodos que incluye la representación de Bode, método
de Laplace, respuesta en frecuencia, criterio de Nyquist, lugar geométrico de la raíces y otros
para hallar los parámetros del PID adecuados. Como criterio de diseño general, se escogen los
parámetros de tal manera que el sistema en lazo cerrado sea estable, de respuesta rápida y
sin sobrepaso. Como herramienta de trabajo se pueden usar programas como MATLAB.
Existen también, métodos experimentales tales como el ideado en 1942 por John G. Ziegler y
Nathaniel B. Nichols que partiendo de la respuesta del proceso a un escalón unitario en lazo
abierto, se pueden obtener los parámetros del PID. Ziegler y Nichols también describieron una
técnica de ajuste en lazo cerrado.
En casos donde no tenemos el modelo del motor, ni podamos aplicar métodos experimentales
como Ziegler y Nichols, se puede utilizar un método de prueba y error basado en el
conocimiento de lo que cada acción de control (proporcional, integral y derivativa) aporta a la
acción de control general del sistema. Por simplicidad utilizaremos esta técnica en el presente
trabajo, la cual se describe a continuación:
1) Se requiere de una manera de variar instantáneamente el valor de referencia (set-point) de
cero al máximo de la velocidad esperada. Esto es equivalente aplicar un escalón a la entrada
del controlador.
2) Teniendo la ganancia integral y derivativa a cero. Aplique un escalón repetidamente
variando cada vez la ganancia proporcional hasta obtener un valor razonable de Kp. Esto es
que la respuesta se aproxime a la entrada y oscile continuamente alrededor de la entrada con
una pequeña cantidad de amortiguamiento. Si la oscilación no decrece gradualmente en su
amplitud, entonces el sistema es considerado inestable.
3) Luego que se encuentre un valor razonable para Kp, se trabaja con el ajuste de Kd. Aplique
un escalón repetidamente variando cada vez la ganancia derivativa hasta obtener un valor
razonable de Kd. Esto es que la respuesta se amortigue rápidamente eliminando las
oscilaciones alrededor de la entrada y permaneciendo en un valor ligeramente menor que el
valor de la entrada. Esto es lo que se denomina error de estado estable y que puede ser
corregido con el ajuste de Ki.
4) Luego que se encuentre un valor razonable para Kd, se trabaja con el ajuste de Ki. Aplique
un escalón repetidamente variando cada vez la ganancia integral hasta obtener un valor
razonable de Ki. Esto es eliminar el error de estado estable tal que la respuesta sigue a la
entrada. Este parámetro debe ajustarse cuidadosamente pues puede introducir inestabilidad en
el sistema.
Periodo de Muestreo
Como periodo de muestreo se toma normalmente 1/10 del tiempo de subida del sistema en
lazo cerrado. El tiempo de subida se define como el tiempo necesario para que el sistema pase
del 10% al 90% del valor final de la respuesta.
Otro criterio que se puede usar es 1/10 de la constante de tiempo del sistema. La constante de
tiempo de un sistema se define como el tiempo necesario para que la respuesta a un escalón
unitario alcance el 63% del valor final de la respuesta. Para un sistema que logra su valor final
a los 2 seg. se toma como periodo de muestreo T igual a 0.12 seg. que es 1/10 de la
constante de tiempo del sistema.
Carlos A. Narváez V, 2008
Hardware
La fig. 8 muestra el prototipo desarrollado que consta de: Motor DC de escobillas 25 Voltios,
tacómetro, H-Bridge basado en el LMD18200 y fuente de poder 5VDC para la lógica TTL. La
alimentación de 25VDC para el motor se obtuvo de una fuente de poder variable de laboratorio.
El microcontrolador y el resto del circuito se implementó en un break-board separado.
Motor DC
Fuente Poder
+5VDC
Tacómetro
Control LMD18200
Fig. 8 Prototipo Control Motores DC de escobillas
La fig. 9 muestra el diagrama esquemático utilizado en este trabajo. En el podemos observar lo
siguiente: Se utiliza cuatro potenciómetros conectados a cuatro canales del convertidor
analógico digital del PIC18F452, los tres primeros representan los parámetros del controlador
digital (Kp, Ki y Kd) y el último establece la velocidad referencia o setpoint. Se utiliza una
pantalla LCD de 16X2 caracteres, comandada por dos interruptores (push-botton) los cuales
permiten desplegar información variada, uno de ellos despliega la información en sentido hacia
delante y el otro en reversa.
El LMD18200 ha sido configurado para ser utilizado en modo PWM signo-magnitud. La
dirección de giro se escogió de manera arbitraria, en este caso colocando el pin Dir a “1” y el
freno (pin Brake) se deshabilitó colocando este pin a “0”.
La señal PWM se obtiene configurando el módulo CCP1 del microcontrolador en modo PWM y
los pulsos generados por el tacómetro son realimentados al microcontrolador y contados
configurando el TIMER1 en modo contador. El microcontrolador trabaja a 10Mhz.
Carlos A. Narváez V, 2008
+5VDC
+5VDC
Kd
+5VDC
Ki
100
Kp
100
10K
0.1uf
0.1uf
100
10K
0.1uf
+5VDC
RPM
100
10K
10K
0.1uf
+5VDC
10nf
33
34
35
36
37
38
39
40
.1uf
LED
13
14
1K
1
10Mhz
11
32
PIC18F452
22pf
8
9
10
1
Vs
Dir
PWM
Brake
Ground
9
Sense TFO
A
180
10K
1
-
7414
2
Señal
2
LMD18200
+5VDC
19
20
21
22
27
28
29
30
+5VDC
+
10nf
MOTOR DC
CNZ1021
10K
+5VDC
14
13
12
11
10
9
8
7
6
5
4
3
2
1
.1uf
15
16
17
18
23
24
25
26
1
B1 2
Out1 10
Out2 11
B2
D7
D6
D5
D4
D3
D2
D1
D0
E
R /W
RS
VEE
VC C
VSS
VDD
RC0/T1OSO/T1CKI
RA0
RC1/T1OSI
RA1
CCP1/RC2
RA2
RC3/SCK/SCL
RA3
RC4/SKI/SDA
RA4/TOCKI
RC5/SDO
RA5/SS
RC6/TX/CK
RC7/RX/DT
INT0/RB0
INT1/RB1
RD0/PSP0
INT2/RB2
RD1/PSP1
CCP2/RB3
RD2/PSP2
RB4
RD3/PSP3
RB5
RD4/PSP4
RB6
RD5/PSP5
RB7
RD6/PSP6
RD7/PSP7
OSC1/CLKIN
OSC2/CLKOUT
RE0/RD
MCLR/VPP
RE1/WR
RE2/CS
VDD
VDD
VSS
VSS
2
3
4
5
6
7
U4
12
31
10K
+5VDC 25VDC
6
3
5
4
7
8
LCD-Display
+5VDC
4.7K
Fig. 9 Diagrama Esquemático del Sistema
Carlos A. Narváez V, 2008
Software
El Software fue escrito utilizando el compilador C de CCS inc. Los valores de los parámetros
del PID se obtienen a través de canales del convertidor analógico digital de 10bits. Estos
valores son puestos a formato q7, para que estén en un rango de 0 a 1. El rango de los
parámetros del PID se modifican, cambiando el valor de esta variable. Toda la aritmética se
realiza utilizando formato q7 a fin de evitar overflow.
El lazo PID se realiza cada 26 miliseg y la actualización del duty cicle del módulo PWM se
realiza cada 408 microseg. El despliegue de información en la pantalla LCD se refresca cada
segundo.
///////////////////////////////////////////////////////////////////////////
////
MAESTRO_PID.C
////
////
Control PID de Velocidad de un Motor DC
////
////
Versión Aritmetica Fixed Point
////
///////////////////////////////////////////////////////////////////////////
#include <18f452.h>
#device ADC=10
#fuses HS,PUT,BROWNOUT,WDT128,NOLVP
#use fast_io(A)
#use fast_io(B)
#use fast_io(C)
#use fast_io(D)
#use fast_io(E)
#use delay(clock=10000000,RESTART_WDT)
#use rs232(baud=19200,parity=N,xmit=PIN_C6,rcv=PIN_C7)
#zero_ram
#define TIMER3_DIV 120
#byte
#byte
#byte
#byte
PORTA
PORTB
PORTC
PORTE
=
=
=
=
0xF80
0xF81
0xF82
0xF84
#bit SYSLED = PORTB.4
#define LEDTIME 10
#byte TMR1L
#byte TMR1H
= 0xFCE
= 0xFCF
/* definitions for Timer1 module */
#define ALL_OUT 0
#define ALL_IN 0xff
/**************************************************************************
* Variables Globales
**************************************************************************/
int tickcount, t;
unsigned ledticks;
unsigned int16 wheel_counts, wheel_test, last_counts;
unsigned int16 delta_counts;
signed int16 pwmSet;
unsigned int16 Driver_pwm;
signed int16 error;
unsigned int16 iPrev;
signed int8 error_S8, ePrev;
Carlos A. Narváez V, 2008
//definiciones para motor trabajando a 25 Voltios DC
#define MIN_PULSES 1
/* Mínimo pulsos por periodo de muestreo */
#define MAX_PULSES 21
/* Máximo pulsos por periodo de muestreo */
#define MAX_PWM 1015
/* Maximo PWM (100%) del controlador */
#define MIN_PWM
40
/* Minimo PWM del controlador */
unsigned int channel;
unsigned int16 P_Term, I_Term, D_Term;
signed int8 P_Term_q7, I_Term_q7, D_Term_q7;
unsigned int16 Vel, P_GAIN, I_GAIN, D_GAIN;
signed int8 P_GAIN_S8, I_GAIN_S8, D_GAIN_S8;
#include "lcd-pd.h"
/**************************************************************************
* Leer Velocidad Motor
**************************************************************************/
void read_Vel(void)
{
SET_ADC_CHANNEL(0);
delay_us(10);
Vel = READ_ADC();
// Motor Velocidad, escala0-1023
}
/**************************************************************************
* Leer Ganancias PID
**************************************************************************/
void read_pid_Gain(void)
{
SET_ADC_CHANNEL(1);
delay_us(10);
P_GAIN = READ_ADC();
// Ganancia Proporcional
P_GAIN_S8 = P_GAIN>>3;
// Formato q7
SET_ADC_CHANNEL(2);
delay_us(10);
I_GAIN = READ_ADC();
// Ganancia Integral
I_GAIN_S8 = I_GAIN>>3;
SET_ADC_CHANNEL(3);
delay_us(10);
D_GAIN = READ_ADC();
// Ganancia derivativa
D_GAIN_S8 = D_GAIN>>3;
}
/**************************************************************************
* desplegar datos segun channel
**************************************************************************/
void desplegar_datos(int channel)
{
switch(channel) {
case 0:
printf(displays,"\r
P
printf(displays,"\n%D %D
break;
case 1:
printf(displays,"\rVel.
printf(displays,"\n%04LU
break;
case 2:
printf(displays,"\rError
printf(displays,"\n%5ld
break;
case 3:
printf(displays,"\rPwmSet
printf(displays,"\n%5ld
break;
}
I
D ");
%D ",P_GAIN_S8, I_GAIN_S8, D_GAIN_S8);
Counts
%04LU
");
",Vel, Delta_counts);
");
",error);
");
",pwmSet);
}
Carlos A. Narváez V, 2008
/**************************************************************************
* Enviar datos puerto Serial
**************************************************************************/
void rs232(void) {
//
printf("%05LU,", conta0);
//
printf("%03LU,", timer0);
//
printf("%01.4f,", vout0);
//
printf("%01.4f,", vout1);
//
printf("%01.4f,", vout2);
//
printf("%01.4f,", vout3);
// printf("\n\r");
}
/**************************************************************************
* Actualiza el contador tick, retorna no-cero si cambia
**************************************************************************/
short geticks(void)
{
static BYTE tc, lastc=0;
tc = ((get_timer3()>>8) - lastc);
if (tc >= TIMER3_DIV)
{
tickcount++;
lastc += TIMER3_DIV;
return 1;
}
return 0;
}
/***************************************************************************
* Chequea si timeout usando el contador tick dado
***************************************************************************/
short timeout(int &var, int tout)
{
short ret=0;
if (!tout || tickcount-var>=tout)
{
var = tickcount;
ret = 1;
}
return(ret);
}
/**************************************************************************
* Interrupcion INT0
**************************************************************************/
#INT_EXT
// Switch Display UP
void EXT0_isr(void)
{
if(channel == 3)
channel = 0;
else
channel++;
}
Carlos A. Narváez V, 2008
/**************************************************************************
* Interrupcion INT1
**************************************************************************/
#INT_EXT1
// Switch Display Down
void EXT1_isr(void)
{
if(channel == 0)
channel = 3;
else
channel--;
}
/**************************************************************************
* Actualiza PWM Duty Cycle
**************************************************************************/
#int_TIMER2
void TIMER2_isr(void)
// 408 microseg - 2450.98 Hz.
{
// update PWMs during rollover for
// glitch-free operation
set_pwm1_duty(Driver_pwm);
// put x% duty on Drive Signal
}
/***************************************************************************
* Lazo PID
***************************************************************************/
#int_timer3
void timer3_isr(void)
// Periodo de muestreo cada 26 miliseg
{
t = t + 1;
Wheel_counts = TMR1H;
wheel_counts = wheel_counts<<8;
Wheel_counts += TMR1L;
Wheel_test = TMR1H;
wheel_test = wheel_test<<8;
Wheel_test += TMR1L;
if(Wheel_test != Wheel_counts)
{
Wheel_counts = TMR1H;
wheel_counts = wheel_counts<<8;
Wheel_counts += TMR1L;
}
//velocidad del motor en pulsos/periodo de muestreo
delta_counts = (Wheel_counts - last_counts);
last_counts = Wheel_counts;
read_vel();
//Velocidad Referencia (Setpoint) Escala 0-1023
// Escale delta_counts a valores PWM (0-1023) para usar la misma
// escala y calcule el Error
error = (vel - ((delta_counts*MAX_PWM) / MAX_PULSES));
error_S8 = error>>3; // rango -128 a 127
//multipicación 8x8 con signo utilizando formato q7
I_Term = iprev + ((signed int16)I_GAIN_S8 * (signed int16)error_S8);
D_term = ((signed int16)D_GAIN_S8 * ((signed int16)error_S8 - (signed int16)ePrev));
p_term = (signed int16)P_GAIN_S8 * (signed int16)error_s8;
P_term_q7 = P_term >>7;
I_term_q7 = I_term >>7;
D_term_q7 = D_term >>7;
// repone formato q7
pwmSet = pwmSet + (P_Term_q7 + I_Term_q7 + D_term_q7) ;
//Acción de control
Carlos A. Narváez V, 2008
if(pwmSet > MAX_PWM) {
//Evita Windup
I_term = iprev;
pwmSet = MAX_PWM;
}
else if(pwmSet < MIN_PWM)
{
I_term = iprev;
pwmSet = MIN_PWM;
}
// Guarde el
//usado como
ePrev
iPrev
error actual y el término integral actual para se
valores previos en el próximo periodo de muestreo
= error;
= I_Term;
Driver_pwm = (int16) pwmSet;
}
/**************************************************************************
* Programa Principal
**************************************************************************/
void main() {
setup_adc_ports(ALL_ANALOG);
// Configura los 8 Convertidores
setup_adc(ADC_CLOCK_DIV_32);
// A/D
setup_wdt(WDT_ON);
// Perro guardian ON
setup_timer_1(T1_EXTERNAL|T1_DIV_BY_1); // Contador eventos Externos
setup_ccp1(CCP_PWM);
// Configura modulos CCP1 como PWM
setup_timer_2(T2_DIV_BY_4, 255, 1);
// PWM 2.44Khz, interrupción 40 mseg
setup_timer_3(T3_INTERNAL|T3_DIV_BY_1); // Real time interval 26 milliseg
set_tris_A(ALL_IN);
set_tris_B(0x0F);
set_tris_c(0x01);
set_tris_D(ALL_OUT);
LCD_SETUP();
disp_serial = FALSE;
disp_lcd = TRUE;
timeout(ledticks,0);
port_b_pullups(false);
read_pid_Gain();
// Leer ganancias PID
set_pwm1_duty(0);
enable_interrupts(INT_EXT);
ext_int_edge(0,H_TO_L);
enable_interrupts(INT_EXT1);
ext_int_edge(1,H_TO_L);
enable_interrupts(INT_TIMER2);
enable_interrupts(INT_TIMER3);
enable_interrupts(GLOBAL);
while(1) {
restart_wdt();
geticks();
if(timeout(ledticks, LEDTIME)){
}
if(t > 38)
{
// Una vez por segundo....
read_pid_Gain();
SYSLED = !SYSLED;
rs232();
desplegar_datos(channel);
t = 0;
}
}
}
Carlos A. Narváez V, 2008
Conclusiones
La realización de un control PID es una tarea sencilla, pero la entonación de los parámetros es
compleja. Partiendo del conocimiento del efecto de cada parámetro sobre la acción de control
total y experimentando con diferentes valores, se puede obtener un rendimiento satisfactorio
del sistema.
Carlos A. Narváez V, 2008