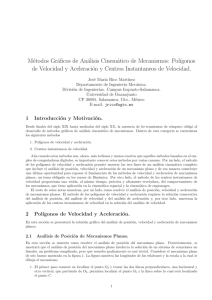
Métodos Gráficos de Análisis Cinemático de Mecanismos Planos.
Anuncio

Métodos Gráficos de Análisis Cinemático de Mecanismos
Planos.
José Marı́a Rico Martı́nez
Departamento de Ingenierı́a Mecánica
División de Ingenierı́as, Campus Irapuato-Salamanca
Salamanca, Gto. 36885, México
1
Introducción y Motivación.
Desde finales del siglo XIX hasta mediados del siglo XX, la ausencia de he-rramientas de cómputo
obligó al desarrollo de métodos gráficos de análisis cinemático de mecanismos. Dentro de esta
categoria se encuentran los siguientes métodos
1. Polı́gonos de velocidad y aceleración.
2. Centros instantaneos de velocidad.
Aún cuando estos métodos son, ahora, mas tediosos y menos exactos que aquellos métodos
basados en el empleo de computadores digitales, es importante conocer estos métodos por varias
razones. Por un lado, el método de los polı́gonos de velocidad y aceleración permite mostrar
las tres fases de un análisis cinemático completo que incluye el análisis de posición, velocidad
y aceleración de un mecanismo plano y de esa manera constituye una última oportunidad para
repasar el fundamento de los métodos de velocidad y aceleración de mecanismos planos, un tema
obligado en los cursos de Dinámica. Por otro lado, el método de los centros instantaneos de
velocidad proporciona una visión, al mismo tiempo, práctica y altamente reveladora que tiene
aplicación en la cinemática espacial y la cinemática de engranages.
El resto de estas notas muestran como resolver el análisis de posición, velocidad y aceleración
de mecanismos planos. El método de los polı́gonos de velocidad y aceleración requiere la solución
consecutiva del análisis de posición, del análisis de velocidad y del análisis de aceleración. En
la parte final de estas notas se presenta el método de los centros instántaneos de velocidad, este
método es el antecente histórico de los métodos de tornillos infinitesimales que pueden extenderse
fácilmente al análisis de velocidad, aceleración y orden superior de mecanimos planos y espaciales.
2
Análisis de Posición de Mecanismos Planos.
En esta sección se muestra como resolver el análisis de posición del mecanismo plano. Posteriormente, se mostrará que el análisis de posición del mecanismo plano involucra la solución de un
sistema de ecuaciones no lineales, un problema complicado, pero que resuelto graficamente es casi
trivial. Considere el mecanismo plano de seis barras mostrado en la figura 1. La figura muestra
las longitudes de los eslabones y la escala a la cual se dibuja el mecanismo.
1. El primer paso consiste en localizar el punto O2 y trazar las dos lı́neas perpendiculares, una
horizontal y otra vertical, que partiendo de O2 , permiten localizar el punto O6 y la lı́nea
sobre la cual está localizado el punto C.
1
Figure 1: Mecanismo Plano de Seis Barras.
Figure 2: Segundo Paso del Análisis de Posición de un Mecanismo Plano de Seis Barras.
2. El segundo paso consiste en localizar el punto A trazando una lı́nea que pasa por O2 y con
un ángulo de 45◦ con respecto al semieje positivo X, vea la figura 2.
3. El tercer paso consiste en determinar el punto C, localizando la intersección de la lı́nea
horizontal que pasa por el punto O2 y un cı́rculo con centro en el punto A y radio igual a la
longitud AC. Es evidente que la solución indicada en la parte derecha de la figura 3 no es de
interés en este problema. Además, es posible determinar la localización del punto B, situado
a la mitad del segmento AC.
4. El paso final del análisis de posición del mecanismo consiste en la determinación del punto
D, localizado en la intersección de dos cı́rculos. El primero de ellos con centro en el punto B
y radio igual a BD y el segundo con centro en el punto O6 y radio O6 D. Es evidente que la
solución indicada con lı́nea punteada, en la figura 4, no es la deseada.
El resultado de este análisis de posición es el dibujo del mecanismo mostrado en la figura 1.
Este dibujo es el punto de partida para realizar el análisis de velocidad del mecanismo.
3
Análisis de Velocidad de Mecanismos Planos.
En esta sección se muestra como, después de finalizar el análisis de posición de un mecanismo
plano, es posible resolver el análisis de velocidad del mecanismo. A continuación se presentan los
pasos necesarios para realizar el análisis de velocidad del mecanismo.
2
Figure 3: Tercer Paso del Análisis de Posición de un Mecanismo Plano de Seis Barras.
1. El primer paso del análisis de velocidad consiste en seleccionar un punto que servirá como
origen del polı́gono de velocidad, ası́ como la escala con la que se dibujarán los vectores
asociados al polı́gono de velocidad, por ejemplo 1 u.l. = 1 mm/seg.. Como regla general, se
recomienda dibujar el polı́gono y los cálculos correspondientes al análisis de velocidad en una
nueva capa —“layer”— y con otro color. Por ejemplo, en el problema a resolver se seleccionó
una escala de 100 u.l. = 1pulg./seg., vea la figura 5.
2. El segundo paso consiste en dibujar el vector que representa la velocidad del punto A, ~vA .
Debe notarse que en el punto A existen en realidad dos puntos A coincidentes, uno que forma
parte del eslabón 2, A2 , y el otro que forma parte del eslabón 3, A3 . Puesto que el punto
A está localizado en el eje de rotación del par de revoluta, ambos puntos tienen la misma
velocidad, es decir
~vA2 = ~vA3 .
Esta velocidad está calculada, como si el punto A formara parte del eslabón 2, por lo tanto
~vA = ω
~ 2 × ~rA/O2 ,
donde la magnitud de esta velocidad está dada por
| ~vA |=| ω
~ 2 || ~rA/O2 | Sen 90◦ = 2
pulg.
seg.
Puesto que la escala del polı́gono de velocidad es de 100 u.l. = 1pulg./seg., el vector que
representa ~vA es de 200 u.l. Además, la dirección de ~vA es perpendicular a ambos ω~2 , por
lo tanto en el plano del dibujo, y a ~rA/O2 . Debe notarse que para facilitar la medición de
los vectores la punta de flecha no está, como es usual, dibujada en el extremo del vector, el
extremo del vector se denomina el punto A, vea la figura 6, y corresponde a la imagen de
velocidad del punto A del mecanismo.
3
Figure 4: Cuarto Paso del Análisis de Posición de un Mecanismo Plano de Seis Barras.
3. El segundo paso consiste en determinar la velocidad del punto C, como se indicó en el primer
paso, existen dos puntos C coincidentes. C3 que forma parte del eslabón 3 y C4 que forma
parte del eslabón 4. Como ambos puntos yacen en el eje de rotación del par de revoluta
tienen la misma velocidad. Por lo tanto
~vC3 = ~vC4 .
Además, la velocidad del punto C3 , está dada por
~ 3 × ~rC/A = ~vA2 + ~vC/A
~ 3 × ~rC/A = ~vA2 + ω
~vC3 = ~vA3 + ω
(1)
Por lo tanto, se tiene la ecuación vectorial
~ 3 × ~rC/A = ~vC4 ,
~vA2 + ω
(2)
donde, además, se conoce la dirección de ~vC4 , puesto que el par cinemático que conecta los
eslabones 1 y 4 es un par prismático, entonces la dirección de ~vC4 es horizontal.
Esta ecuación vectorial (2) genera dos ecuaciones escalares y por lo tanto debe existir, como
máximo, dos incógnitas escalares. Estas incógnitas son, la magnitud de la velocidad angular
ω
~ 3 y la magnitud de la velocidad ~vC4 . De manera gráfica, la ecuación (2) se resuelve dibujando, a partir del punto A, una lı́nea en la dirección de la velocidad ~vC/A = ω
~ 3 × ~rC/A y a
partir del punto O, una lı́nea en la dirección de la velocidad ~vC4 . La intersección de ambas
lı́neas determina el punto C, vea la figura 7, que es la imagen de velocidad del punto C del
mecanismo original.
4. El tercer paso consiste en determinar la velocidad del punto B3 , a partir de la ecuación (1)
puede escribirse
~ 3 × ~rB/A
(3)
~ 3 × ~rB/A = ~vA2 + ω
~vB3 = ~vA3 + ω
4
Figure 5: Resultado del Análisis de Velocidad de un Mecanismo Plano de Seis Barras.
Figure 6: Primer Paso del Análisis de Velocidad de un Mecanismo Plano de Seis Barras.
Sin embargo, los puntos A, B y C son colineales. De manera que tomando en cuenta las
distancias entre los puntos, se tiene que
1
~rB/A = ~rC/A
2
De aquı́ que
1
1
~ 3 × ~rB/A = ~vA2 + ω
~vB3 = ~vA2 + ω
~ 3 × ~rC/A = ~vA2 + ~vC/A .
(4)
2
2
Esta ecuación puede resolverse graficamente dibujando un cı́rculo con centro en el punto A,
del polı́gono de velocidad, con radio igual a la mitad del vector ~vC/A que va del punto A
al punto C. La intersección del cı́rculo con el vector ~vC/A determina el punto B, la imagen
de velocidad del punto B del mecanismo original. El vector que va del punto O al punto B
determina la velocidad de ambos puntos B3 y B5 , denominada ~vB , vea la figura 8.
5. El cuarto paso del análisis de velocidad consiste en determinar la velocidad del punto D,
nuevamente se tiene que
~vD5 = ~vD6
Esta ecuación puede escribirse como
~ 5 × ~rD/B = ω
~ 6 × ~rD/O6 = ~vD6
~vD5 = ~vB5 + ~vD/B = ~vB5 + ω
5
(5)
Figure 7: Segundo Paso del Análisis de Velocidad de un Mecanismo Plano de Seis Barras.
Figure 8: Tercer Paso del Análisis de Velocidad de un Mecanismo Plano de Seis Barras.
De nueva cuenta, si la ecuación (5) puede resolverse debe tener como máximo dos incógnitas
escalares. En este caso, esas incógnitas son las magnitudes de las velocidades angulares
ω
~5 y ω
~ 6 . Graficamente esta ecuación se resuelve dibujando a partir del punto B una lı́nea
perpendicular al vector ~rD/B y dibujando a partir del punto O una lı́nea perpendicular al
vector ~rD/O6 . La intersección de estas dos lı́neas determina el punto D, vea la figura 5, que
es la imagen de velocidad del punto D del mecanismo original.
6. El paso final del análisis de velocidad consiste en determinar las magnitudes de los vectores del
polı́gono de velocidad y a partir de ellos determinar la magnitud y dirección de las velocidades
angulares. En ocasiones, es necesario, además, determinar la velocidad de un punto, como
cuando un eslabón está sujeto a un movimiento de traslación en cuyo caso todos los puntos
del cuerpo tienen la misma velocidad y la velocidad angular del eslabón es nula.
(a) Considere la determinación de la velocidad angular ω
~ 5 . El primer problema es el determinar cual de los vectores del polı́gono de velocidad permite determinar ω
~ 5 , la solución
es muy simple, el vector debe conectar dos puntos que pertenezcan al eslabón 5, es decir
los puntos B y D. En este caso es el vector ~vD/B , del dibujo Autocad, se tiene que la
magnitud del vector es de 152.9509 u.l., por lo que, a partir de la escala del polı́gono de
velocidad, que es de 100 u.l. = 1 pulg./seg., se tiene que
~vD/B = 1.529509 pulg./seg.
El sentido es el indicado por el polı́gono de velocidad, de izquierda a derecha y de abajo
6
hacia arriba. A partir de la ecuación (5), se tiene que
~vD/B = ω
~ 5 × ~rD/B
| ~vD/B |=| ω
~ 5 || ~rD/B | Sen 90◦ =| ω
~ 5 || ~rD/B |
Por lo tanto,
|ω
~ 5 |=
| ~vD/B |
1.529509 pulg./seg.
=
= 0.38237725 rad./seg.
| ~rD/B |
4 pulg.
El sentido se determina empleando la regla de la mano derecha, en este caso es en sentido
horario –cw clockwise–.
(b) Considere la determinación de la velocidad del punto C. Debe recordarse que ~vC3 = ~vC4 .
Mida el vector que va del punto O al punto C, del dibujo Autocad, se tiene que la
magnitud del vector es de 116.0213 u.l., por lo que, a partir de la escala del polı́gono de
velocidad, que es de 100 u.l. = 1 pulg./seg., se tiene que
~vC = ~vC3 = ~vC4 = 1.160213 pulg./seg.
El sentido de la velocidad es el indicado en el polı́gono de velocidad.
El resto de los resultados, que se emplearán como datos para el análisis de aceleración, se
determina de manera semejante.
4
Análisis de Aceleración de Mecanismos Planos.
En esta sección se muestra como, después de finalizar el análisis de posición y de velocidad de un
mecanismo plano, es posible resolver el análisis de aceleración del mecanismo. A continuación se
presentan los pasos necesarios para realizar el análisis de aceleración del mecanismo.
1. El primer paso del análisis de aceleración consiste en seleccionar un punto que servirá como
origen del polı́gono de aceleración, ası́ como la escala con la que se dibujarán los vectores
asociados al polı́gono de aceleración, por ejemplo 1 u.l. = 1 mm/seg 2 . Como regla general,
se recomienda dibujar el polı́gono y los cálculos correspondientes al análisis de aceleración
en una nueva capa –“layer”– y con otro color. Por ejemplo, en el problema a resolver se
seleccionó una escala de 100 u.l. = 1pulg./seg 2 ., vea la figura 9.
En este caso se supondrá que la velocidad angular del eslabón 2 es constante, por lo tanto
α
~ 2 = 0 rad./seg 2 .
2. El segundo paso del análisis de aceleración consiste en calcular todas las aceleraciones normales y la aceleración tangencial del punto A. Para tal fı́n, se tiene que, empleando el
concepto de placa representativa, las aceleraciones normales están dadas por
¢
¡
~ 2 |2 ~rA/O2
~anA = ω
~2 × ω
~ 2 × ~rA/O2 = − | ω
¡
¢
~anC/A = ω
~3 × ω
~ 3 × ~rC/A = − | ω
~ 3 |2 ~rC/A
¡
¢
~anD/B = ω
~5 × ω
~ 5 × ~rD/B = − | ω
~ 5 |2 ~rD/B
¢
¡
~ 6 |2 ~rD/O6
~anD = ω
~6 × ω
~ 6 × ~rD/O6 = − | ω
Las magnitudes de estas aceleraciones normales están indicadas en la figura 9. Por otro lado,
la aceleracion tangencial del punto A está dada por
~atA = α
~ 2 × ~rA/O2 = ~0 pulg./seg.2
7
Figure 9: Resultado del Análisis de Aceleración de un Mecanismo Plano de Seis Barras.
3. El tercer paso del análisis de aceleración consiste en determinar la aceleración del punto C,
vea la figura 10. De nueva cuenta debe notarse que existen dos puntos C coincidentes. C3
que forma parte del eslabón 3 y C4 que forma parte del eslabón 4. Como ambos puntos yacen
en el eje de rotación del par de revoluta tienen la misma aceleración. Por lo tanto
~aC3 = ~aC4 .
Además, la aceleración del punto C3 , está dada por
~aC3
¡
¢
~3 × ω
~ 3 × ~rC/A + α
~ 3 × ~rC/A
= ~aA3 + ~anC/A + ~atC/A = ~aA3 + ω
¡
¢
~3 × ω
~ 3 × ~rC/A + α
~ 3 × ~rC/A
= ~aA2 + ω
(6)
Por lo tanto, se tiene la ecuación vectorial
~ 3 × ~rC/A = ~aC4 ,
~aA2 + ~anC/A + α
(7)
donde, de nueva cuenta, la dirección de la aceleración ~aC4 es horizontal pues el par cinemático
que conecta los eslabones 1 y 4 es prismático.
Esta ecuación vectorial (7) genera dos ecuaciones escalares y por lo tanto deben existir,
como máximo, dos incógnitas escalares. Estas incógnitas son, la magnitud de la aceleración
angular α
~ 3 y la magnitud de la aceleración ~aC4 . De manera gráfica, la ecuación (7) se
resuelve dibujando, a partir del punto A, un vector que represente, a la escala seleccionada,
la aceleración normal ~anC/A y, a continuación, una lı́nea en la dirección de la aceleración
tangencial ~atC/A = α
~ 3 ×~rC/A y a partir del punto O, una lı́nea en la dirección de la aceleración
~aC4 . La intersección de ambas lı́neas determina el punto C, vea la figura 10.
4. El tercer paso del análisis de aceleración consiste en determinar la aceleración del punto B,
vea la figura 10, a partir de la ecuación (6) puede escribirse
¡
¢
~3 × ω
~ 3 × ~rB/A + α
~ 3 × ~rB/A
(8)
~aB3 = ~aA3 + ω
Sin embargo, los puntos A, B y C son colineales. De manera que tomando en cuenta las
distancias entre los puntos, se tiene que
1
~rB/A = ~rC/A
2
8
Figure 10: Tercer Paso del Análisis de Aceleración de un Mecanismo Plano de Seis Barras.
De aquı́ que
~aB3
¡
¢
~3 × ω
~ 3 × ~rB/A + α
~ 3 × ~rB/A
= ~aA2 + ω
¡
¢ 1
1
= ~aA2 + ω
~3 × ω
~ 3 × ~rC/A + α
~ 3 × ~rC/A
2
2
1
1
1
= ~aA2 + ~anC/A + ~atC/A = ~aA2 + ~aC/A .
2
2
2
(9)
Esta ecuación puede resolverse graficamente dibujando un vector que conecte el punto A con
el punto C, este vector representa la aceleración total del punto C respecto del punto A
~aC/A = ~anC/A + ~atC/A
A continuación se dibuja un cı́rculo con centro en el punto A, del polı́gono de aceleración,
con radio igual a la mitad del vector ~aC/A . La intersección del cı́rculo con el vector ~aC/A
determina el punto B. Si se dibujara el vector que va del punto O al punto B, este vector
determinarı́a la aceleración de ambos puntos B3 y B5 , denominada ~aB .
5. El quinto paso del análisis de aceleración consiste en determinar la aceleración del punto D,
nuevamente se tiene que
~aD5 = ~aD6
Esta ecuación puede escribirse como
~aD5
¡
¢
~5 × ω
~ 5 × ~rD/B + α
~ 5 × ~rD/B
= ~aB5 + ~anD/B + ~atD/B = ~aB5 + ω
¢
¡
~ 6 × ~rD/O6 = ~anD + ~atD = ~aD6
= ω
~6 × ω
~ 6 × ~rD/O6 + α
(10)
De nueva cuenta, si la ecuación (10) puede resolverse debe tener como máximo dos incógnitas
escalares. En este caso, esas incógnitas son las magnitudes de las aceleraciones angulares α
~5
y α
~ 6 . Graficamente esta ecuación se resuelve dibujando a partir del punto B un vector
que represente, a la escala seleccionada, la aceleración normal ~anD/B y, a continuación, una
lı́nea en la dirección de la aceleración tangencial ~atD/B = α
~ 5 × ~rD/B . Por otro lado, es
necesario dibujar, a partir del punto O un vector que represente, a la escala seleccionada, la
aceleración normal ~anD y, a continuación, una lı́nea en la dirección de la aceleración tangencial
~atD = α
~ 6 × ~rD/O6 . La intersección de estas dos lı́neas determina el punto D, vea la figura 9.
9
Figure 11: Cuarto Paso del Análisis de Aceleración de un Mecanismo Plano de Seis Barras.
6. El paso final del análisis de aceleración consiste en determinar las magnitudes de los vectores
del polı́gono de aceleración y a partir de ellos determinar la magnitud y dirección de las
aceleraciones angulares. En ocasiones, es necesario además determinar la aceleración de un
punto, como cuando un eslabón está sujeto a un movimiento de traslación en cuyo caso todos
los puntos del cuerpo tienen la misma aceleración y la aceleración angular del eslabón es nula.
(a) Considere la determinación de la aceleración angular α
~ 5 . El primer problema es el
determinar cual de los vectores del polı́gono de aceleración permite determinar α
~ 5 , la
solución es muy simple, el vector debe conectar dos puntos que pertenezcan al eslabón 5,
es decir los puntos B y D, además la magnitud del vector debe depender de la magnitud
del vector α
~ 5 . En este caso, la solución es el vector ~atD/B , del dibujo Autocad, se tiene
que la magnitud del vector es de 164.4554 u.l., por lo que, a partir de la escala del
polı́gono de aceleración, que es de 100 u.l. = 1 pulg./seg 2 ., se tiene que
~atD/B = 1.644554 pulg./seg 2 .
El sentido es el indicado por el polı́gono de aceleración, de izquierda a derecha y de
abajo hacia arriba. A partir de la ecuación (10), se tiene que
~atD/B = α
~ 5 × ~rD/B
| ~atD/B |=| α
~ 5 || ~rD/B | Sen 90◦ =| α
~ 5 || ~rD/B |
Por lo tanto,
|α
~ 5 |=
| ~atD/B |
1.644554 pulg./seg 2 .
=
= 0.4111385 rad./seg 2 .
| ~rD/B |
4 pulg.
El sentido se determina empleando la regla de la mano derecha, en este caso es en sentido
horario —cw clockwise—.
(b) Considere la determinación de la aceleración del punto C. Debe recordarse que ~aC3 =
~aC4 . Mida el vector que va del punto O al punto C, del dibujo Autocad, se tiene que
la magnitud del vector es de 140.6021 u.l., por lo que, a partir de la escala del polı́gono
de aceleración, que es de 100 u.l. = 1 pulg./seg 2 ., se tiene que
~aC = ~aC3 = ~aC4 = 1.406021 pulg./seg 2 .
El sentido de la aceleración es el indicado en el polı́gono de aceleración.
10
El resto de las aceleraciones angulares y aceleraciones puntuales se determinan de manera
semejante.
5
Centros Instántaneos de Velocidad.
Considere el mecanismo plano de cuatro barras mostrado en la figura 1. Es bien claro que el
eslabón 2 tiene un movimiento de rotación, respecto del eslabón fijo, 1, alrededor del punto O2 .
De manera semejante, el eslabón 4 tiene un movimiento de rotación, respecto del eslabón fijo, 1,
alrededor del punto O4 .1
Figure 12: Mecanismo Plano de Cuatro Barras.
Este conocimiento permite determinar de manera muy sencilla la dirección de la velocidad
absoluta; es decir respecto del eslabón fijo, como se muestra en la figura 2. En verdad,
~vM = ω
~ 2 × ~rM/O2
y ~vN = ω
~ 4 × ~rN/O4 .
(11)
Por lo tanto, la velocidad del punto M es perpendicular al vector ~rM/O2 y, por lo tanto, perpendicular a la lı́nea O2 M . Similarmente, la velocidad del punto N es perpendicular al vector ~rN/O4
y, por lo tanto, perpendicular a la lı́nea O4 N . Si se pudiera conocer, aún cuando unicamente sea
de manera instantanea, el punto alrededor del cual el eslabón 3 gira respecto al eslabón 1, entonces
se podrı́a obtener, de manera muy sencilla la dirección de las velocidades de todos los puntos del
eslabón 3.
Si este punto se conociera, se denomina el centro instantaneo de velocidad del eslabón 3 con
respecto al eslabón 1. El resto de estas notas proporcionan una definición formal del centro
instantaneo de velocidad, la teorı́a y técnica necesarias para su determinación y su empleo en
la determinación de la velocidades angulares o puntuales de un mecanismo plano.
6
Definición del Centro Instantaneo de Velocidad del Movimiento Relativo Entre Dos Eslabones.
En principio, es posible proponer un conjunto de tres definiciones equivalentes de un centro instantaneo de velocidad entre dos cuerpos rı́gidos. Esta definición requiere de la consideración de tres
cuerpos rı́gidos, uno de los cuales actua como referencia y no requiere que este cuerpo de referencia
este fijo o tenga movimiento. Mas aún, esta definición no requiere que los tres cuerpos formen parte
1 En sentido mas estricto, los eslabones 2 y 4 tienen un movimiento de rotación alrededor de un eje fijo, cuya
intersección, con el plano de movimiento, es respectivamente O2 y O4 .
11
Figure 13: Mecanismo Plano de Cuatro Barras con Direcciones de las Velocidades de los Puntos
M y N.
de un mecanismo o aun que los cuerpos estén unidos entre si. Sin embargo, la definición requiere
que el mecanismo sea plano; es decir, que todos sus eslabones se muevan en planos paralelos.
Definición 1. Centro Instantaneo de Velocidad. Considere tres cuerpos rı́gidos denominados como i, j, k y considere el movimiento relativo de los cuerpos rı́gidos i y j respecto del cuerpo
rı́gido k, entonces es posible definir el centro instantaneo de velocidad, del movimiento relativo,
entre los eslabones i y j, denotado Oij = Oji de las siguientes tres posibles maneras.
1. El centro instantaneo Oij es una pareja de puntos coincidentes, pertenecientes uno al cuerpo
i, Oi y otro al cuerpo j, Oj , tal que uno de los eslabones gira respecto al otro, respecto a un
eje perpendicular al plano de papel que pasa por el punto Oij .
2. El centro instantaneo Oij es una pareja de puntos coincidentes, pertenecientes uno al cuerpo
i y otro al cuerpo j, tal que no tienen velocidad relativa; es decir:
k
~vOi /Oj = ~0
(12)
3. El centro instantaneo Oij es una pareja de puntos coincidentes, pertenecien-tes uno al cuerpo
i y otro al cuerpo j, tal que tienen la misma velocidad; es decir:
k
~vOi = k~vOj
(13)
Notas. Debe notarse que las tres definiciones son simétricas, de manera que está claro que
Oij = Oji . Por otro lado, se preferirá escribir Oij donde i > j. Además, es perfectamente posible
que el centro instantaneo Oij este fuera de los lı́mites fı́sicos de los cuerpos, de manera que se
supondrá que los cuerpos rı́gidos tienen dimensiones infinitas. Finalmente, es costumbre numerar
los eslabones de un mecanismo a partir del número 1 que, también es costumbre, se reserva para
el eslabón fijo.
Proposición 2. Las tres posibles definiciones de un centro instantaneo son equivalentes.
Prueba: Suponga que Oi y Oj son dos puntos coincidentes en los cuerpos rı́gidos i y j y que
los movimientos de los cuerpos se observan desde el cuerpo k.
1. 1 implica 2. Suponga que el eslabón i gira con respecto al eslabón j alrededor del punto
coincidente Oij , entonces
£ i k j¤
k
~ − ω
~ × ~0 = ~0
(14)
~ i/j × ~rOi /Oj = k ω
~vOi /Oj = k ω
12
2. 2 implica 3. Si
k
entonces
~vOi /Oj = ~0
k
k
~vO
− ~vO
= ~0,
i
j
Por lo tanto
k
k
~vO
= ~vO
.
i
j
(15)
3. 3 implica 1. Si
k
k
,
= ~vO
~vO
j
i
entonces, el único movimiento relativo entre los eslabones i y j es un movimiento de rotación
que instantaneamente tiene su eje de rotación perpendicular al plano de movimiento y que
pasa por el par de puntos coincidentes Oi y Oj .
7
Ejemplos de Determinación de Centros Instantaneos de
Velocidad de un Mecanismo Plano.
En esta sección, se mostrará como determinar la localización de un centro instantaneo de velocidad
cuando se conocen diferentes datos de la velocidad de un cuerpo rı́gido. Posteriormente, se mostrará
como a partir de la localización de los centros instantaneos de velocidad de un mecanismo es posible
determinar la velocidad angular de cualquiera de los eslabones del mecanismo o la velocidad puntual
de un punto arbitrario de cualquiera de los eslabones del mecanismo.
7.1
Determinación de la Localización del Centro Instantaneo de un Eslabón Cuando se Conoce su Velocidad Angular y la Velocidad de un
Punto.
Considere el eslabón mostrado en la figura 3, el cual se mueve respecto al sistema de referencia
representado por el plano. La velocidad angular del eslabón es de ω
~ = 10 rad./seg.k̂ y la velocidad
del punto A cuyo vector de posición respecto al sistema coordenado mostrado en la figura es
~rA = 12 î + 9 ĵ, u.l. Además, su velocidad está dada por ~vA = 15 î − 6 ĵ u.l./seg.
Figure 14: Eslabón de un Mecanismo Plano de Cuatro Barras.
A fin de determinar la localización del movimiento relativo del eslabón respecto al plano, debe
recordarse que el centro instantaneo es una pareja de puntos, uno perteneciente al eslabón y el otro
perteneciente al plano, que son instantaneamente coincidentes y que tienen la misma velocidad.
13
Puesto que todos los puntos del plano están fijos, entonces el centro instantaneo O del movimiento
relativo del eslabón respecto del plano, debe tener velocidad igual a ~0.
Por lo tanto
~0 = ~vO = ~vA + ω
~ × ~rO/A
(16)
De aquı́ que
¡
¢
¡
¢
~0 = ω
~ × ~0 = ω
~ × ~vA + ω
~ × ~rO/A = ω
~ × ~vA + ω
~× ω
~ × ~rO/A
De la identidad del triple producto vectorial y notando que ω
~ y ~rO/A son perpendiculares
¡
¢ ¡
¢
ω
~× ω
~ × ~rO/A = ω
~ · ~rO/A ω
~ − (~
ω·ω
~ ) ~rO/A = − | ω
~ |2 ~rO/A
De aquı́ que
ω
~ × ~vA
(17)
|ω
~ |2
Es importante señalar que esta ecuación indica que el vector de posición del centro instantaneo O
con respecto al punto A es perpendicular al vector de la velocidad del punto A, ~vA . Numericamente
~rO/A =
~rO/A =
10 k̂ × (15 î − 6 ĵ)
3
3
ω
~ × ~vA
=
= î + ĵ.
2
2
|ω
~ |
10
5
2
Por lo tanto
¶
³
´ µ3
3
63
21
î + ĵ =
î +
ĵ.
~rO = ~rA + ~rO/A = 12 î + 9 ĵ +
5
2
5
2
7.2
(18)
Determinación de la Localización del Centro Instantaneo de un Eslabón Cuando se Conoce la Dirección de la Velocidad de Dos Puntos.
Considere el mecanismo plano de cuatro barras mostrado en la Figura 4. Los vectores de posición
de los puntos M, A, B, N son
~rM = (0, 0) ~rA = (0, 20) ~rB = (80, 20) ~rN = (50, 0).
Figure 15: Mecanismo Plano de Cuatro Barras.
Suponga además que la velocidad angular del eslabón 2 es 10 rad/seg. en sentido antihorario.
El análisis de velocidad del mecanismo plano de cuatro barras, llevado a cabo mediante métodos
analı́ticos, conduce al análisis de las siguientes ecuaciones
~vA
~vB/A
~vB
= ω
~ 2 × ~rA/M = (−200, 0, 0)
= ω
~ 3 × ~rB/A = (0, 80 ω3 , 0)
= ω
~ 4 × ~rB/N = (−20 ω4 , 30 ω4 , 0)
14
La ecuación a resolver es
~vB = ~vA + ~vB/A
o
(−20 ω4 , 30 ω4 , 0) = (−200, 0, 0) + (0, 80 ω3 , 0)
(19)
La solución de este sistema de ecuaciones está dado por
ω3 =
15
rad./seg. c.c.w.
4
ω4 = 10 rad./seg. c.c.w.
(20)
Por lo tanto, la velocidad del punto B está dada por
~vB = (−200, 0, 0) + (0, 80 ω3 , 0) = (−200, 300, 0) .
(21)
Considere ahora la determinación del centro instantaneo de velocidad del eslabón 3 con respecto
al eslabón fijo 1, entonces las velocidades que se deben considerar son las absolutas y suponga que
exclusivamente se conoce la dirección de las velocidades de los puntos A y B. Esas direcciones se
indican en la figura 5. De acuerdo con la ecuación (17) el centro instantaneo O está localizado en
la intersección de dos lı́neas. La primera pasa por el punto A y es perpendicular a la dirección de
la velocidad del punto A, ~vA , y la segunda pasa por el punto B y es perpendicular a la dirección
de la velocidad del punto B, ~vB . La construcción se muestra en la figura 5.
Figure 16: Mecanismo Plano de Cuatro Barras y la Localización de Centros Instantaneos del
Eslabón 3 a Partir de las Direcciones de las Velocidades de Dos Puntos.
7.3
Determinación de la Localización del Centro Instantaneo de un
Eslabón Cuando el Movimiento Relativo Entre los Eslabones es
Translación.
Considere nuevamente el mecanismo plano de cuatro barras mostrado en la Figura 4, en esta
sección nos interesa el movimiento relativo del eslabón 4 con respecto al eslabón 2. Entonces, se
tiene que
ω
~ 4/2 = ω
~4 − ω
~ 2 = 10 rad/seg. k̂ − 10 rad/seg. k̂ = ~0
(22)
La ecuación (22) indica que el movimiento relativo del eslabón 4, respecto del eslabón 2 es, en
ese instante, translación.
Considere ahora el punto A que pertenece al eslabón 2 y, ejerciendo un poco la imaginación,
suponga que el eslabón 4 se extiende, de manera que existe un punto A que forma parte del eslabón
4 y que en ese instante coincide con el punto A perteneciente al eslabón 2.
15
Entonces, las velocidades de los puntos A que pertenecen a los eslabones 2 y 4 son
~vA2
= ω
~ 2 × ~rA/M = 10 k̂ × 20 ĵ = (−200, 0, 0)
~vA4
= ω
~ 4 × ~rA/N = 10 k̂ × (−50 î + 20 ĵ) = (−200, −500, 0)
Por lo tanto, la velocidad relativa del punto A4 con respecto al punto A2 , en términos mas
correctos deberı́a decirse que es la velocidad del punto A que pertenece al eslabón
4 respecto a un sistema de referencia sujeto a translación y cuyo movimiento, de
translación, es igual al movimiento del punto A que pertenece al eslabón 2 está dada
por
(23)
~vA4 /A2 = ~vA4 − ~vA2 = (−200, −500, 0) − (−200, 0, 0) = (0, −500, 0)
Por lo tanto, el centro instantaneo de velocidad del eslabón 4, respecto del eslabón 2, estará
localizado en el infinito en la dirección perperdicular a la velocidad ~vA4 /A2 , como se muestra en la
figura 6.
Figure 17: Mecanismo Plano de Cuatro Barras y la Localización de Centros Instantaneos del
Eslabón 4 Respecto del Esalbón 2.
8
Clasificación de los Centros Instantaneos de Velocidad
de los Movimientos Relativos entre los Eslabones de un
Mecanismo Plano.
Los centros instantaneos de velocidad de los diferentes pares de eslabones de un mecanismo plano
pueden clasificarse en base a diferentes criterios.
1. Dependiendo si la localización del centro instantaneo pertenece fijo respecto al eslabón, o
cuerpo rı́gido seleccionado como referencia, fijo o base.
• Centros de velocidad permanentes. Si la localización del centro instantaneo respecto a
la pareja de eslabones permanece fija.
• Centros de velocidad instantaneos. Si la localización del centro instantaneo, respecto a
la pareja de eslabones, cambia durante el movimiento del mecanismo.
16
2. Dependiendo si la localización del centro instantaneo puede realizarse mediante la simple
definición de un centro instantaneo, primario, o requiere la aplicación de métodos mas elaborados como el teorema de Aronhold Kennedy, secundario.
3. Dependiendo si uno de los eslabones involucrados es el eslabón fijo, absolutos, o no, relativos.
9
El Teorema de Aronhold Kennedy.
El teorema de Aronhold Kennedy, fue formulado independiente por Aronhold, en Alemania, y
Kennedy, en el Reino Unido, en la segunda parte del siglo XIX y es la herramienta fundamental
para la localización de los centros instantaneos, secundarios, de velocidad para mecanismos planos.
Es importante señalar que la generalización espacial del teorema de Aronhold Kennedy unicamente
tiene unos 50 años de haberse conocido.
Proposición 3. Teorema de Aronhold Kennedy. Considere tres cuerpos rı́gidos i, j, k
entonces los tres centros instantaneos asociados a los tres movimientos relativos, Oik , Ojk y Oij
entre estos tres cuerpos son colineales. Es decir, los puntos Oik , Ojk y Oij yacen en una lı́nea recta.
Prueba. Considere los tres cuerpos rı́gidos i, j, k mostrados en la figura 3, donde se supondrá
que los movimientos de los eslabones i y j se observan desde el cuerpo k. Primeramente, por
definición los centros instantaneos Oik y Ojk satisfacen la condición
k
~vO
= ~0
ik
k
y ~vO
= ~0.
jk
(24)
Figure 18: Teorema de Aronhold Kennedy.
Por lo tanto
k
~vO
= ~vOkik + ω
~ ik × ~rOij /Oik
ij
k
y ~vO
= ~vOkjk + ω
~ jk × ~rOij /Ojk
ij
(25)
Sustituyendo la ecuación (24) en la ecuación (25), se obtiene que el punto Oij será el centro
instantaneo asociado a los eslabones i y j, cuando se observa desde el eslabón k, si y sólo si
k
k
~vO
= ~vO
⇐⇒ ω
~ ik × ~rOij /Oik = ω
~ jk × ~rOij /Ojk
ij
ij
Sin embargo, se tiene que
~rOij /Ojk = ~rOij /Oik + ~rOik /Ojk
por lo tanto
¤
£
ω
~ ik × ~rOij /Oik = ω
~ jk × ~rOij /Oik + ~rOik /Ojk
17
(26)
o
¤
£ k
~ jk × ~rOik /Ojk
ω
~i − ω
~ jk × ~rOij /Oik = ω
(27)
En esta ecuación hay que distinguir dos casos
1. Primer Caso ω
~ ik − ω
~ jk 6= ~0. Puesto que las dos velocidades angulares ω
~ ik ω
~ jk son paralelas, la
ecuación (27) es cierta si, y sólo si, ~rOij /Oik y ~rOik /Ojk = −~rOjk /Oik tienen la misma dirección,
y por lo tanto los centros instantaneos Oik , Ojk y Oij son colineales.
2. Segundo Caso ω
~ ik − ω
~ jk = ~0. En ese caso
ω
~ ik = ω
~ jk .
y el movimiento relativo entre los eslabones i y j es, al menos instantaneamente, traslación
pura, sin rotación alguna. Suponiendo que el plano de movimiento es el plano X − Y , la
dirección de las velocidades angulares es la del eje Z. Por lo tanto, la ecuación (27) puede
escribirse como
¤
£
k̂ ωik − ωjk × ~rOij /Oik = k̂ ωjk × ~rOik /Ojk
por lo tanto, los vectores ~rOij /Oik y ~rOik /Ojk son colineales y satisfacen la ecuación
ωjk
¤ ~rOik /Ojk
~rOij /Oik = £ k
ωi − ωjk
(28)
Además, a medida que ωik − ωjk → 0, el término
ωjk
£
ωik − ωjk
¤
tiende al infinito, como corresponde a un movimiento de traslación relativo.
10
Aplicación del Teorema de Aronhold Kennedy Para la
Localización de los Centros Instantaneos de Velocidad
Secundarios.
En esta sección, se mostrará como aplicar la teorı́a desarrollada en las secciones anteriores para la
determinación de los centros instantaneos secundarios de mecanismos planos.
Considere el mecanismo mostrado en la Figura 5. En la figura se muestran los centros instantaneos primarios; es decir, aquellos que pueden determinarse por la aplicación, correcta, de las tres
posibles definiciones de un centro instantaneo de velocidad, O21 , O32 , O43 , O41 , O53 , O65 y O61 .
A partir de la determinación de los centros instantaneos primarios, es posible determinar los
restantes centros instantaneos restantes conocidos como secundarios. Esta determinación se realiza aplicando sistematicamente el teorema de Aronhold-Kennedy, de manera especı́fica, el centro
instantaneo de velocidad Oij está localizado en la intersección de las lı́neas
Oij Oik Ojk
donde k ∈ {1, 2, 3, . . . , n}
y k 6= i, k 6= j
donde n es el número de eslabones del mecanismo. El primer paso consiste en determinar el número
de centros instantaneos de velocidad de un mecanismo plano. El argumento para esta determinación es el siguiente; puesto que Oij = Oji , es evidente que el número de centros instantaneos,
N , es el número de combinaciones de los primeros n números naturales, el número de eslabones
del mecanismo, tomados de dos en dos. Es decir
N=
n (n − 1)
n!
=
2! (n − 2)!
2
18
(29)
Figure 19: Centros Instantaneos Primarios de un Mecanismo.
La siguiente tabla muestra una lista de las posibles combinaciones que permiten determinar los
distintos centros instantaneos de un mecanismo plano de seis barras.
Tabla I. Posibles Combinaciones Para la Determinación
de los Centros Instantaneos Secundarios.
O21
O31
O41
O51
O61
O21 O31 O32 O31 O21 O32 O41 O21 O42 O51 O21 O52 O61 O21 O62
O21 O41 O42 O31 O41 O43 O41 O31 O43 O51 O31 O53 O61 O31 O63
O21 O51 O52 O31 O51 O53 O41 O51 O54 O51 O41 O54 O61 O41 O64
O21 O61 O62 O31 O61 O63 O41 O61 O64 O51 O61 O65 O61 O51 O65
O32
O42
O52
O62
O43
O32 O21 O31 O42 O21 O41 O52 O21 O51 O62 O21 O61 O43 O31 O41
O32 O42 O43 O42 O32 O43 O52 O32 O53 O62 O32 O63 O43 O32 O42
O32 O52 O53 O42 O52 O54 O52 O42 O54 O62 O42 O64 O43 O53 O54
O32 O63 O62 O42 O62 O64 O52 O62 O65 O62 O52 O65 O43 O63 O64
O53
O63
O54
O64
O65
O53 O31 O51 O63 O31 O61 O54 O41 O51 O64 O41 O61 O65 O51 O61
O53 O32 O52 O63 O32 O62 O54 O42 O52 O64 O42 O62 O65 O52 O62
O53 O43 O54 O63 O43 O64 O54 O43 O53 O64 O43 O63 O65 O53 O63
O53 O63 O65 O63 O53 O65 O54 O64 O65 O64 O54 O65 O65 O54 O64
11
Aplicación de los Centros Instantaneos de Velocidad.
Finalmente, se mostrará como aplicar el conocimiento de la localización de los centros instantaneos
de velocidad de un mecanismo plano en la solución del análisis de velocidad del mecanismo. Existen
varios métodos para realizar el análisis de velocidad de un mecanismo mediante centros instantaneos
de velocidad, aquı́ unicamente se mostrará el método directo. Es costumbre seleccionar al eslabón
fijo como el eslabón 1 y al eslabón motriz como el eslabón 2. Suponga que se desea conocer la
velocidad angular del eslabón j.2 Entonces, es necesario localizar los tres centros instantaneos
asociados a tres eslabones: El eslabón fijo 1, el eslabón motriz 2 y el eslabón de interés j. Estos
centros instantaneos son
O21 Oj1 Oj2 ,
2 O bien, si el eslabón j tiene movimiento de traslación, la velocidad del eslabón j; es decir, la velocidad de
cualesquiera de los puntos que forman parte del eslabón j.
19
Figure 20: Centros Instantaneos Primarios y Secundarios de un Mecanismo.
y de acuerdo con el teorema de Aronhold-Kennedy deben ser colineales; es decir, deben estar
localizados a lo largo de una lı́nea recta.
La clave del problema reside en la misma definición del centro instantaneo de velocidad relativo,
Oj2 . De la propia definición, se tiene que
1 2
~vOj2
j
= 1~vO
j2
(30)
La aplicación de este resultado fundamental depende de
1. El eslabón j está sujeto a movimiento plano general.
2. El eslabón j no está sujeto a movimiento plano general, si no a un caso más sencillo y especial
del movimiento plano general. Las dos alternativas son:
(a) El eslabón j está sujeto a un movimiento de rotación alrededor de un eje fijo.
(b) El eslabón j está sujeto a un movimiento de traslación.
Caso 1. Si el eslabón j está sujeto a movimiento plano general, se tiene que la ecuación (30)
puede escribirse como
j
j
2
+ω
~ j × ~rOj2 /Oj1
= 1~vO
= 1~vO
ω
~ 2 × ~rOj2 /O21 = 1~vO
j2
j1
j2
(31)
Sin embargo, de la propia definición de un centro instantaneo de velocidad absoluto, se tiene
que
1 j
~vOj1 = ~0
Por lo tanto, se tiene que
~ j × ~rOj2 /Oj1 .
ω
~ 2 × ~rOj2 /O21 = ω
La solución de esta ecuación conduce a la determinación de la velocidad angular ω
~ j.
20
(32)
Caso 2a. Si el eslabón j está sujeto a rotación alrededor de un eje fijo, se tiene que la ecuación
(30) puede escribirse como
j
2
=ω
~ j × ~rOj2 /Oj1 .
= 1~vO
ω
~ 2 × ~rOj2 /O21 = 1~vO
j2
j2
(33)
La solución de esta ecuación conduce a la determinación de la velocidad angular ω
~ j.
Caso 2b. Si el eslabón j está sujeto a traslación, el eslabón j no tiene velocidad angular; es decir
ω
~ j = ~0 y el problema se reduce a determinar la velocidad absoluta de un punto del eslabón j,
pues todos los puntos del cuerpo j tienen la misma velocidad. Tomando como base el punto
Oj2 , se tiene que la ecuación (30) puede escribirse como
1 j
~vOj2
2
= 1~vO
=ω
~ 2 × ~rOj2 /O21
j2
(34)
La solución de esta ecuación conduce a la determinación de la velocidad del punto Oj2 y, por
lo tanto, a la determinación de la velocidad de cualquiera de las partı́culas del eslabón j.
Bibliografı́a
[1] Paul, B. [1979], Kinematics and Dynamics of Planar Machinery, Englewood Cliffs, New Jersey:
Prentice-Hall.
[2] Mabie, H. H. y Reinholtz, C. F. [1986], Mechanisms and Dynamics of Machinery, 4th. Ed.,
New York: John Wiley and Sons.
[3] Uicker, J. J. Jr., Pennock, G. R. y Shigley, J. E. [2003], Theory of Machines and Mechanisms,
3rd. Ed. New York: Oxford University Press.
21