Correcciones Correcciones
Anuncio

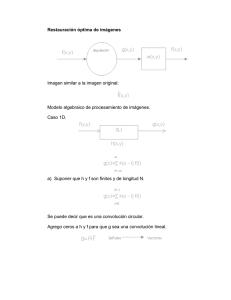
Correcciones Septiembre de 2013 Correcciones Geométricas: Sistemáticas: esfericidad, movimiento de rotación, inclinacion de la órbita. No sistemáticas: relieve, movimientos de la plataforma, proyección cartográfica. Radiométricas: Eliminar ruidos en los ND. Corrección atmosférica. 1 Tipos de errores geométricos Sistemáticos: Esfericidad, Movimiento de rotación, Ángulo de observación, Inclinación de la órbita. Proyección cartográfica. corrección orbital No sistemáticos: Relieve, Movimientos de la plataforma corrección geométrica proyección cartográfica. Errores no sistemáticos C a be ceo (P itc h ) A la b e o (R o ll) G iro L a te ra l (Y aw ) T ra y e c to ria A ltu ra V e lo c id a d Fuente: Chuvieco (1996) 2 Esencia de la corrección geométrica Generar funciones que permitan convertir coordenadas de imagen a coordenadas de mapa: F(c’) = f1 (c,l). F(l’) = f2 (c,l). Referencia puede ser un mapa o una imagen de otra fecha. GEORREFERENCIACION : es el proceso de registrar o “ajustar” los píxeles de una imagen digital a una proyección geográfica determinada, haciendo que los elementos en la imagen estén asociados o referenciados a posiciones verdaderas en tierra, respecto de algún sistema de referencia. 3 FLUJO DEL PROCESO DE CORRECCION GEOMETRICA O Georreferenciación: Selección, identificación y captura de puntos de control GCP’s Cálculo de las funciones de transformación de coordenadas en base al modelo elegido y a las coordenadas fuente y de referencia. Cálculo de nueva estructura de grid (si hay resample), asignación de nuevas coordenadas, y transferencia de los números digitales a cada pixel de la imágen Fuente: Chuvieco (1996) Corrección con puntos de control Col. Col. est. Resid 992,00 990,96 1,04 936,00 936,65 -0,65 923,00 923,34 -0,34 810,00 810,02 -0,02 651,00 650,79 0,21 653,00 653,33 -0,33 677,00 676,56 0,44 464,00 465,04 -1,04 253,00 252,31 0,69 Fila Fila Est. Resid Error 102,00 102,60 -0,60 1,20 195,00 194,05 0,95 1,15 431,00 431,33 -0,33 0,47 498,00 497,90 0,10 0,10 453,00 453,16 -0,16 0,27 264,00 263,31 0,69 0,76 117,00 117,85 -0,85 0,95 230,00 229,50 0,50 1,16 512,00 512,30 -0,30 0,75 Fuente: Chuvieco (1996) 4 PUNTOS DE CONTROL TERRESTRE (GCP’s – Ground Control Points) Son píxeles específicos en una imagen cuyas coordenadas de referencia son conocidas. Estas coordenadas pueden ser 2D o 3D. Consisten de dos tipos de coordenadas: •Coordenadas fuente: en el sistema en que se encuentra la imagen. •Coordenadas de referencia: en el sistema al que se desea transformar la imagen. Búsqueda de puntos de control Localización: Comunes imagen - mapa (GPS). Lugares estables. Distribución: Que cubran toda la zona. Número: Depende del orden del ajuste. 5 Modelo de ajuste Funciones de transformación: imagenmapa o mapa-imagen: sˆ j 0,m k 0,m j a j ,k X jY k Tipo de función: orden del ajuste. Valoración del error: RMS general y en cada punto. Verificación a posteriori. Tipos de funciones Lineales: ci = a0 + a1 Xi + a2 Yi li = b0 + b1 Xi + b2 Yi Cuadráticas: ci = a0 + a1 Xi + a2 Yi +a3 Xi2 + a4 Yi2 + a5 XiYi 6 Ejemplo de funciones TRANSLACIÓN INCLINACIÓN CAMBIOS DE ESCALA x = a + x' 0 x = x' + a 2 y' x = a x' 1 y = b0 + y' y = y' y = b y' 2 ROTACION x = a x1' + a 2 y' y = b x'1 + b 2y' a = b = cos 1 PERSPECTIVA x = a x' y' 3 2 a = -b = sen 2 1 Fuente: Chuvieco (1996) y = y' Valoración del error Global: residual Mean Square RMS = i 1,n ( cˆi - ci )2 + ( lˆi - l i )2 n En cada punto: EL ELi = ( cˆi - c i )2 + ( lˆi - l i )2 7 Error RMS (Root Mean Square) Las ecuaciones polinómicas son utilizadas para obtener la posición de cada GCP de la imagen a corregir en las coordenadas X’ e Y’ de la proyección cartográfica del mapa o imagen referencia. El error RMS es la distancia entre la ubicación en el espacio de la imagen del GCP en coordenadas INPUT (xi, yi) y la ubicación del mismo GCP en las coordenadas retransformadas (x’i, y’i). En otras palabras, es la diferencia entre la coordenada retransformada deseada para un GCP y la coordenada real obtenida como salida. La diferencia (X-X’) e (Y-Y’) permite estimar que tan bien esta ajustando la función polinómica elegida a la solución del problema (o sea, corregir la imagen), esto se hace mediante cuadrados mínimos y se obtiene un error RMS total, para toda la imagen. El error esta dado en magnitudes de píxel, es decir, un error de 0.5 significa un error de medio píxel para toda la imagen. En el caso particular de ERDAS, se puede dejar la opción de calcular el resultado de la función polinómica a medida que se incorpora cada nuevo GCP, o calcular la función y su error RMS luego de haber obtenido un numero coherente (entre 25-50) de GCP. Idealmente, el valor de error RMS por referencia para corregir una imagen debe ser aproximadamente 0.5, y en lo posible nunca superar la unidad. No obstante, el error RMS obtenido indica un valor ‘promedio’ para toda la imagen, este valor puede ser menor en ciertas zonas de la imagen con alta densidad de GCP y mayor en otros lugares. 8 Residual de cada punto X X X X X L EL L X X C C Observado X Estimado Residuales Col. Col. est. Resid 992,00 990,96 1,04 936,00 936,65 -0,65 923,00 923,34 -0,34 810,00 810,02 -0,02 651,00 650,79 0,21 653,00 653,33 -0,33 677,00 676,56 0,44 464,00 465,04 -1,04 253,00 252,31 0,69 Fila Fila Est. Resid Error 102,00 102,60 -0,60 1,20 195,00 194,05 0,95 1,15 431,00 431,33 -0,33 0,47 498,00 497,90 0,10 0,10 453,00 453,16 -0,16 0,27 264,00 263,31 0,69 0,76 117,00 117,85 -0,85 0,95 230,00 229,50 0,50 1,16 512,00 512,30 -0,30 0,75 Col. = 15.177,79 + 0,032452 X - 0,006443 Y Lin = 147.365,5 - 0,006590 X - 0,032202 Y 9 Criterios de interpolación IMAGEN ORIGINAL VECINO MAS PRÓXIMO IMAGEN CORREGIDA INTERPOLACIÓN BILINEAL CONVOLUCIÓN CÚBICA Fuente: Chuvieco (1996) Remuestreo de la imagen (‘resampling’) Es la reproyección de los datos de la imagen dentro del sistema cartográfico del mapa. Para ello se utilizan las funciones polinómicas antes definidas. Cada punto en las coordenadas de proyección cartográfica es ‘buscado’ en la imagen original de acuerdo con la función que los relaciona y ese píxel de la imagen original es puesto en una nueva grilla “vacía” que tiene el mismo sistema de proyección cartográfica que el mapa. Aquellos valores del mapa para los cuales no exista píxel en la imagen son rellenados con cero o algún valor background dado en la nueva grilla. 10 Métodos de Remuestreo Vecino más cercano: Asigna a cada píxel de la imagen salida (rectificada) el valor del píxel mas cercano en la imagen source. Tiene como ventaja que transfiere los valores originales de los datos, sin promediarlos. Esto es importante cuando se discriminan tipos de vegetación o se determinan distintos niveles de turbidez o temperaturas en el agua. Es bueno para utilizarlos antes de un proceso de clasificación y útil para imágenes temáticas (cualitativas). Las desventajas son que crea un efecto de “escalones” en los bordes cuando se remuestrea desde un tamaño de grilla grande a uno chico. Además pueden perderse algunos valores (que no se asignan a ningún nuevo píxel) y otros duplicarse. Interpolación Bilineal Considera el valor de los 4 píxeles mas cercanos en la imagen INPUT para asignar el nuevo valor al píxel de la imagen salida. Las ventajas son que no existe el efecto de “escalones” en los bordes que puede aparece en nearest neighbor y además hay mejor exactitud espacial. Se usa a menudo cuando se cambia el tamaño de las celdas en los datos. La desventaja es que como los píxeles son promediados tiene el efecto de una baja frecuencia de convolución. Es decir, algunos extremos de los valores de los datos pueden perderse. 11 Convolución Cúbica Es similar al anterior, solo que considera los 16 píxeles mas cercanos y además se aplica una aproximación de una función de convolución sobre los datos, mas que una lineal. La ventaja es que en la mayoría de los casos la media y varianza de los píxeles salida coincide con la media y varianza de los píxeles entrada mas que en cualquier otro método. También puede tanto mejorar la forma de la imagen como remover ruido, aunque esto depende de los datos que se estén usando. Este método es recomendado cuando se esta cambiando mucho el tamaño de las celdas en los datos. Las desventajas son que los datos son alterados y que debido a sus características constituye el método mas lento de todos. Entonces, sobre los métodos de remuestreo… Los mas usados son el primero (Vecino más cercano) y el tercero (Convolución Cúbica). El vecino mas cercano es el que mas conserva la radiometría original de la imagen (los valores), pero genera un efecto de corrimiento de geometrías locales en cuanto al posicionamiento de los píxeles. La convolución cúbica conserva mejor la geometría local pero cambia los valores radiométricos y además insume mucho mas tiempo de procesamiento. La utilización de uno u otro depende de las necesidades particulares de la aplicación y del tipo de imagen a procesar. En radar, por ejemplo, debido a las características de la señal SAR, no sirve utilizar el método del vecino más cercano. 12 Vecino más próximo + No modifica los valores. + Es el más rápido - Aparecen elementos lineales en “escalera” - Pueden perderse valores Fuente: Chuvieco (1996) Convolución cúbica - Interpola valores. - Es el más lento. + Se suavizan las transiciones lineales. + Mejor aspecto visual. 13 ORIGINAL VECINO Efecto del tipo de interpolación INTERPOLACIÓN CONVOLUCIÓN Fuente: Chuvieco (1996) LANDSAT ETM… Notar el efecto de “escalones” que genera el método del vecino mas cercano, visible mayormente en los caminos Convolución Cúbica Vecino más cercano 14 15