17.5 Controlabilidad La propiedad de un sistema de poder mover el
Anuncio

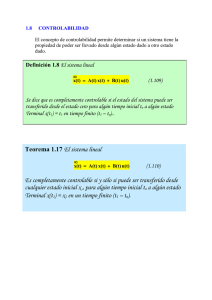
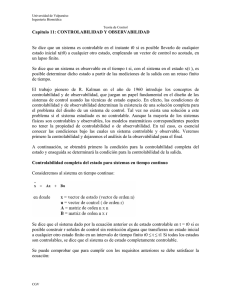
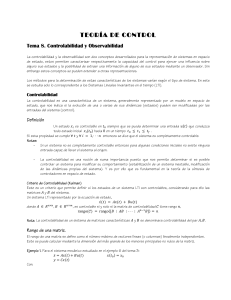
17.5 Controlabilidad La propiedad de un sistema de poder mover el estado vía la entrada de control a ciertas localizaciones en el espacio de estado se denomina CONTROLABILIDAD. Tenemos el siguiente teorema que permite determinar la controlabilidad de un sistema: Teorema 17.1 Considerar el modelo en el espacio de estado: • x(t ) = Ax(t ) + Bu(t ) y (t ) = Cx(t ) + Du(t ) i) El conjunto de todos los estados controlables es el rango de la matriz de controlabilidad: [ Γc = B AB A 2 B . . A n − 1B ii) ] El modelo es completamente controlable ssi Γc tiene rango igual al número de filas. Ejemplo: Considerar el modelo en variables de estado: - 3 1 A= - 2 0 1 B= - 1 Determinar si es completamente controlable. 17.6 Observabilidad En general, la dimensión de la variable de salida observada puede ser menor que la dimensión del estado x(t). Se podría decir que observando la salida durante un intervalo de tiempo, entonces podríamos decir algo sobre el estado. La propiedad asociada se denomina OBSERVABILIDAD ( o reconstructibilidad). El ensayo para observabilidad de un sistema se establece en el siguiente teorema: Teorema 17.2 Considerar el modelo en el espacio de estado: • x( t ) = Ax( t ) + Bu(t ) y ( t ) = Cx( t ) + Du( t ) El sistema es completamente observable ssi la matriz de observabilidad: C CA 2 Γ0 = CA . CA n − 1 Tiene rango igual al número de filas. Ejemplo: Considerar el modelo en el espacio de estado: - 3 - 2 A= 1 0 1 B= 0 C = [1 − 1] Determinar si es completamente observable.