examen de fundamentos físicos de la ingeniería.curso 05/06
Anuncio

EXAMEN DE FUNDAMENTOS FÍSICOS DE LA INGENIERÍA.CURSO 05/06.
PRIMERO INGENIERO DE TELECOMUNICACIÓN. EXAMEN DE JUNIO
SOLUCIÓN DETALLADA
Todas las unidades están en el Sistema Internacional. En aquellas cuestiones donde sea necesario cuantificar el módulo
de la aceleración de la gravedad (g), tómese éste igual a 10. En las cuestiones de Relatividad c es la velocidad de la luz. La
configuración estándar de dos sistemas de referencia, S y S 0 , es aquella en la que los ejes homónimos son paralelos, S 0 se
traslada con respecto a S con velocidad constante ~v = v~ı, y los orı́genes O y O 0 coinciden en t = t0 = 0.
PRIMERA PARTE
1. Un sistema de partı́culas se mueve respecto a cierto sistema de referencia inercial S de modo que su centro de masas
se encuentra en reposo indefinidamente. En general, podemos afirmar que:
La energı́a cinética del sistema es nula.
No actúan fuerzas externas sobre ninguna de las partı́culas del sistema.
× La cantidad de movimiento del sistema es constante.
Respuesta:
Si el centro de masas del sistema se encuentra en reposo indefinidamente, esto implica que no tiene velocidad ni
aceleración. Como la cantidad de movimiento de un sistema es igual al producto de la masa total del sistema por la
velocidad del centro de masas, deducimos que la cantidad de movimiento es nula para todo instante de tiempo. En
conclusión, la cantidad de movimiento del sistema es constante.
Nótese que la primera respuesta no es correcta, pues no es cierto que la energı́a cinética de un sistema sea igual a la
que llevarı́a un punto cuya masa fuese la masa del sistema, y que se moviese con la velocidad de su centro de masas.
Un ejemplo es el caso de un disco homogéneo que gira respecto a su eje de revolución. Evidentemente, la energı́a
cinética del sistema no es nula, y sin embargo su centro de masas permanece en reposo.
PN
Tampoco es correcta la segunda respuesta. Aplicando el teorema del centro de masas ( i=1 f~iext = M~aCM ) se deduce,
teniendo en cuenta que su aceleración es nula, que la suma de las fuerzas externas al sistema es cero. Pero esto no
significa que las partı́culas del sistema no estén afectadas por fuerzas externas. Es la suma de todas ellas la que, si es
cero, da lugar a que el centro de masas se mueve con velocidad constante (teorema del centro de masas), y a que la
cantidad de movimiento del sistema no cambie con el tiempo (teorema de la cantidad de movimiento).
2. Una partı́cula P se mueve respecto a cierto sistema de referencia inercial OXY Z sometida a una fuerza no nula F~ (t),
−→
siendo t el tiempo. Sea ~r(t) ≡ OP (t) el vector de posición de la partı́cula. Se sabe que F~ (t) y ~r(t) son paralelos. Sea
~ O el momento cinético de la partı́cula respecto a O. En general,
dA el área barrida por ~r entre t y t + dt, y sea L
podemos afirmar que:
× dA/dt es constante en el transcurso del tiempo.
La partı́cula realiza un movimiento circular.
~ O cambia con el tiempo.
L
Respuesta:
Aplicaremos el teorema del momento cinético al movimiento de la partı́cula. El momento cinético en O es, por
definición:
~ O = ~r ∧ m~v ,
L
(1)
y su derivada respecto al tiempo respecto a un sistema de referencia inercial es (teorema del momento cinético):
~O
dL
= ~r ∧ F~ .
dt
Ahora bien, según el enunciado el vector de posición y la fuerza son paralelos, de modo que su producto vectorial
(momento de la fuerza en el origen) es nulo. En conclusión, el momento cinético no cambia en el transcurso del
tiempo. Por tanto, la tercera respuesta es incorrecta.
Analicemos a continuación la primera respuesta. El área (dA) barrida por ~r entre t y t + dt es (ver figura):
1
|~r ∧ d~r|
.
2
Teniendo en cuenta que d~r = ~v dt, y multiplicando y dividiendo por la masa de la partı́cula, se tiene:
dA =
dA =
|~r ∧ m~v |dt
2m
dA
|~r ∧ m~v |
=
.
dt
2m
⇒
Comparando con (1) vemos que
~ O|
dA
|L
=
.
dt
2m
Como el vector momento cinético es constante, también lo es su módulo. Por tanto dA/dt no cambia en el transcurso
del tiempo. Ası́, la respuesta correcta es la primera.
Z
dr
r
dA
Y
O
X
La segunda respuesta es obviamente falsa. Pensemos por ejemplo en un movimiento rectilı́neo en el eje OX. En esta
situación, el vector de posición (x~ı) y la fuerza (F~ = F~ı) son paralelos.
3. El vector de posición de un punto P es ~r(t) = 3t~ı−(t2 /2)~, siendo t el tiempo. ¿Cuánto vale el módulo de la aceleración
tangencial de P para t = 1?
√
√
√
1/ 37 ; × 1/ 10 ;
1/ 82
Respuesta:
Calcularemos en primer lugar el módulo de la velocidad (celeridad) en función del tiempo, y posteriormente derivaremos
respecto al tiempo para obtener, tomando el valor absoluto, el módulo de la aceleración tangencial. Tenemos:
~v =
Sustituyendo t = 1, se obtiene
p
d~r
= 3~ı − t ~ ⇒ v = 9 + t2 ;
dt
dv |t|
|~aT | = = √
.
dt
9 + t2
1
|~aT (t = 1)| = √ .
10
4. Una partı́cula de masa m que se mueve inicialmente por el suelo horizontal, sube por una semicircunferencia vertical
fija de radio R (no hay√rozamiento y la unión entre el suelo horizontal y la semicircunferencia es suave). Sabiendo que
la celeridad inicial es 6gR, ¿cuánto vale el módulo de la reacción normal de la semicircunferencia para φ = 60 ◦ ?
5mg/2
× 11mg/2
g
4mg
Respuesta:
Las fuerzas que actúan sobre la partı́cula son el peso y la reacción normal, dado que no existe rozamiento. Aplicando
la segunda Ley de Newton y proyectando en la dirección normal a la semicircunferencia, tenemos:
N − mgcosφ = m
v2
R
⇒ N = mgcosφ + m
2
v2
.
R
(2)
N
g
mg
Necesitamos conocer v en función de φ para poder calcular la reacción normal en función del ángulo. Para ello,
aplicaremos el teorema de la energı́a cinética. Teniendo en cuenta que el peso es una fuerza conservativa y que
la reacción normal no realiza trabajo porque es perpendicular al desplazamiento de la partı́cula, deducimos que se
conserva la energı́a mecánica de la partı́cula. Tomando
√ como referencia de energı́a potencial nula el suelo, y teniendo
en cuenta que la celeridad en el punto más bajo es 6gR, tenemos:
1 p
1
m( 6gR)2 = mv 2 + mgR(1 − cosφ).
2
2
(3)
A partir de las ecuaciones (2) y (3) se puede obtener N (φ). Realizando operaciones sencillas se llega al siguiente
resultado:
N (φ) = mg(4 + 3cosφ).
Finalmente, sustituyendo φ = 60◦ queda:
N (φ = 60◦ ) =
11mg
.
2
5. Una partı́cula A, de masa mA , se mueve libremente por el eje inercial OX (no hay rozamiento). Otra partı́cula B, de
masa desconocida, se encuentra en reposo sobre OX. En un instante dado A choca inelásticamente con B, quedando
las dos partı́culas pegadas en su movimiento posterior. Si la energı́a cinética final del sistema A + B dividida por la
energı́a cinética inicial es 1/2, ¿cuánto vale la masa de B?
3mA
;
2mA
;
× mA
Respuesta:
Según el enunciado, el cociente entre la energı́a cinética final del sistema y la inicial es 1/2. Es decir:
1
2
2 (mA + mB )v
1
2
2 mA v 0
= (1 +
mB
)
mA
v
v0
2
=
1
,
2
(4)
donde v0 es la celeridad inicial de A, y v es la celeridad del sistema en la situación final, en la que los dos objetos se
quedan pegados (en la situación inicial la energı́a cinética del sistema es la de A, dado que B está en reposo).
Nótese que podemos conocer el cociente entre v y v0 aplicando la conservación de la cantidad de movimiento horizontal
del sistema, dado que no hay rozamiento. Inicialmente la cantidad de movimiento del sistema es la que lleva A puesto
que B no tiene velocidad; su valor es mA v0~ı, y la igualaremos a la que lleva el sistema en la situación final, (mA −mB )v~ı.
Tenemos
mA v0 = (mA + mB )v ⇒
v
mA
=
.
v0
mA + m B
Ahora, sustituyendo (5) en (4)
mB
(1 +
)
mA
1
B
1+ m
mA
!2
=
1
2
⇒ 1+
3
mB
=2 ⇒
mA
m B = mA .
(5)
6. Una partı́cula de masa m se mueve en el eje inercial OX, sin rozamiento, ligada a un muelle ideal de constante k.
Éste a su vez se encuentra unido a otro muelle ideal de constante k, cuyo otro extremo se encuentra fijo en el origen
(los dos muelles están asociados en serie). En el instante inicial
p la partı́cula se encuentra en el semieje OX negativo, a
una distancia d del origen, y con una velocidad de módulo d k/m dirigida hacia el sentido positivo de OX. ¿A qué
distancia del origen el módulo de la aceleración alcanza su valor máximo?
√
2d ; × 3 d ;
3d
Respuesta:
En primer lugar obtendremos la constante equivalente del sistema de muelles. Para ello, haremos uso de la expresión
siguiente que permite calcular la constante equivalente de un sistema de dos muelles en serie de constantes k 1 y k2 1 :
1
1
1
=
+ .
keq
k1
k2
(6)
En este caso k1 = k2 = k. Ası́:
1
1
1
= +
keq
k
k
⇒ keq =
k
.
2
El módulo de la aceleración será máximo cuando lo sea el módulo de la fuerza elástica que actúa sobre la partı́cula,
es decir, cuando el sistema de muelles alcance su máxima elongación (A) y por tanto la distancia de la partı́cula al
origen sea máxima. Aplicando la conservación de la energı́a mecánica, y teniendo en cuenta que la celeridad es nula
para la situación de elongación máxima, tenemos:
1
m d
2
⇒
r
k
m
!2
1
1
+ keq d2 = keq A2
2
2
1
k
1
1
md2 + kd2 = kA2 ⇒
2
m 4
4
A=
√
3 d.
7. Una partı́cula realiza oscilaciones libres amortiguadas en el eje OX. Se sabe que la partı́cula realiza 600 oscilaciones
antes de que la amplitud decaiga a una fracción 1/2 de su valor inicial. ¿Cuánto vale el decremento logarı́tmico?
× ≈ 1.16 × 10−3
;
≈ 2.68 × 10−3
≈ 1.83 × 10−3
;
Respuesta:
La amplitud de las oscilaciones amortiguadas está dada por la expresión:
γt
A(t) = A(0)e− 2 ,
1
Vamos a deducir la ecuación (6). Llamaremos x a la posición de la partı́cula, la cual es igual a x 1 + x2 , donde x1 (x2 ) es la
elongación del muelle de constante k1 (k2 ). La fuerza que actúa sobre la partı́cula está dada por
F = k 2 x2 ,
dado que es el muelle de constante k2 el que actúa sobre ésta. Ahora, aplicando el teorema del centro de masas al sistema de muelles,
y teniendo en cuenta que al ser muelles ideales (sin masa), la suma de fuerzas externas al sistema debe anularse, esto implica que las
fuerzas en los extremos, k1 x1 y k2 x2 , deben igualarse, es decir:
k1 x 1 = k 2 x 2
⇒ x1 =
k2
x2 .
k1
Por tanto:
x1 + x 2 = x ⇒ (
k2
+ 1)x2 = x ⇒ F =
k1
1
k1
x
+
1
k2
.
En consecuencia, el efecto del sistema de muelles sobre la partı́cula es equivalente al de un muelle de constante
keq =
1
k1
1
+
1
k2
4
=
k1 k2
.
k1 + k 2
donde γ es la constante de amortiguamiento, y el decremento logarı́tmico es
∆ ≡ ln
A(t)
γTa
=
,
A(t + Ta )
2
siendo Ta el periodo de las oscilaciones libres amortiguadas. Teniendo en cuenta que la partı́cula realiza 600 oscilaciones
antes de que la amplitud decaiga a la mitad de su valor inicial, esto significa que:
γ600Ta
A0
= A 0 e− 2 .
2
Tomando logaritmos neperianos y operando, se tiene:
γ600Ta
= ln2 ⇒
2
∆=
ln2
≈ 0.00116.
600
8. Sea A1 la amplitud de oscilación en régimen permanente de un oscilador sometido a una fuerza excitadora armónica
de frecuencia angular ω1 . Sea ωr la frecuencia de resonancia en amplitud, siendo ω1 > ωr . Si se aumenta la frecuencia
angular de la fuerza excitadora, a otro valor ω2 > ω1 , la nueva amplitud en régimen permanente será:
Mayor que A1 .
× Menor que A1 .
Igual que A1 .
Respuesta:
Esta pregunta se resuelve fácilmente acudiendo a la curva de resonancia, que describe la dependencia de la amplitud en
régimen permanente con la frecuencia excitadora. Esta curva es creciente para valores de ω inferiores a ω r y decreciente
para valores de ω superiores a ωr . Según el enunciado ω1 > ωr , luego estamos en la zona decreciente de la curva.
En consecuencia, si se aumenta la frecuencia angular de la fuerza excitadora a otro valor ω 2 > ω1 , concluimos que
A(ω2 ) < A(ω1 ).
9. Una onda armónica plana tiene sus frentes de onda paralelos al plano 2x + 2y + z − 4 = 0. En un instante dado, la
diferencia de fase (en valor absoluto) entre los puntos ~r1 = (0, 0, 1) y ~r2 = (1, 0, 0), es igual a π/3. Se sabe también
que el tiempo que tarda un frente de onda en ir del punto (1, 1, 0) al punto (2, 2, 0), es 4. ¿Cuánto vale la frecuencia
angular de la onda?
× π/3 ;
4π
;
2π
Respuesta:
~ · ~r − ωt + φ) la expresión de la onda armónica plana, donde K
~ es el vector de onda, cuyo
Sea g(x, y, z, t) = Acos(K
módulo es 2π/λ y cuya dirección es perpendicular a los frentes de onda. Como los frentes son paralelos al plano
2x + 2y + z − 4 = 0 esto implica que
~ = ± 2π ~u,
K
λ
siendo
2
2
1
~u = ~ı + ~ + ~k,
3
3
3
siendo ~u un vector unitario perpendicular al plano 2x + 2y + z − 4 = 0. El valor absoluto de la diferencia de fase, en un
~ · (~r2 − ~r1 )|. Teniendo en cuenta los datos del enunciado, podemos
instante dado, entre dos puntos ~r1 y ~r2 es igual a |K
calcular la longitud de onda:
2π 2
± ( ~ı + 2 ~ +
λ 3
3
π
1~
~
k) · (k −~ı) =
3
3
⇒ λ = 2.
Por otro lado, como el tiempo que tarda un frente de onda en ir del punto ~r3 = ~ı + ~ al punto ~r4 = 2~ı + 2~ es 4, esto
significa que:
~ · ~r3 − ωt + φ = K
~ · ~r4 − ω(t + 4) + φ ⇒ K
~ · (~r3 − ~r4 ) + 4ω = 0
K
⇒ ±
2π 2
2
1
2π 4
( ~ı + ~ + ~k) · (−~ı − ~) + 4ω = 0 ⇒ ± (− ) + 4ω = 0.
λ 3
3
3
2
3
5
~ = (2π/λ)~u. El resultado final para
Como ω > 0 hemos de coger el signo positivo, de modo que el vector de onda es K
ω es:
ω=
π
.
3
10. La función g(x, t) = 2x2 + 8t2 :
Es una onda viajera de celeridad 2.
No verifica la ecuación de ondas.
× Es una superposición de ondas viajeras de sentidos distintos.
Respuesta:
Estudiaremos en primer lugar si g(x, t) verifica o no la ecuación de ondas
∂2g
1 ∂2g
= 2 2.
2
∂x
v ∂t
Un cálculo sencillo nos da:
∂g
∂2g
= 4x ;
= 4;
∂x
∂x2
∂2g
∂g
= 16t ;
= 16.
∂t
∂t2
4=
16
v2
⇒ v = 2.
Por tanto, g(x, t) verifica la ecuación de ondas para v = 2, de modo que descartamos la segunda respuesta.
Ahora estudiaremos si se trata o no de una onda viajera. Si es una onda viajera debe satisfacer una de las ecuaciones:
∂g
1 ∂g
=±
,
∂x
2 ∂t
donde el signo “+” (“−”) se tiene cuando la onda se desplaza en el sentido negativo (positivo) del eje OX. Observando
las expresiones de las derivadas de primer orden vemos que dicha ecuación no se cumple para ninguno de los dos signos.
Por tanto, g(x, t) no es una onda viajera.
Otra forma de ver esto último es la siguiente: si se trata de una onda viajera, entonces g(x, t) debe ser función,
exclusivamente, de la variable z = x + αt, donde α = 2 ó α = −2. Despejando x en función de z y t, y sustituyendo
en la expresión de la onda, el carácter viajero de la misma significa que el resultado de dicha sustitución debe ser que
se quede sólo la dependencia en z. Veamos:
g = 2(z − αt)2 + 8t2 = 2z 2 + (2α2 + 8)t2 − 4αzt 6= g(z).
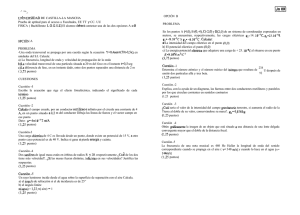
11. Los sistemas de referencia S y S 0 están en la configuración estándar con v = c/2. En t = t0 = 0 se emite desde el
origen O de S un pulso luminoso hacia un espejo E, ligado a S, que se encuentra en la posición x E = d, siendo d una
constante positiva. ¿En qué instante, medido por S 0 , llegará el pulso reflejado en E al origen O 0 ?
√
√
√
2d/(c 5) ;
2 d/c ; × 2d/(c 3)
Respuesta:
Si llamamos t1 al instante en que el pulso llega a O 0 (medido por S), la posición de O 0 será x1 = vt1 (espacio recorrido
por O0 entre t = 0 y t = t1 ). Aplicando la transformación de Lorentz del tiempo tenemos:
t01
v
v2
= γ(t1 − 2 x1 ) = γt1 (1 − 2 ) = t1
c
c
r
1−
v2
.
c2
(7)
Nótese que la expresión anterior podrı́a haberse deducido directamente dado que t 01 es un intervalo de tiempo propio,
al ser el intervalo de tiempo entre dos sucesos (coincidencia entre O y O 0 , y llegada de la luz a O 0 ) que suceden en la
misma posición respecto a S 0 (x0 = 0). Aplicando la dilatación del tiempo se tiene que t1 = γt01 , expresión que coincide
con (7).
6
Y’
Y’
Y
Y
E
E
t=t’=0
t=t1
O’
X’
X
O’
X’
X
O
O
d
vt1
d
Nos queda por calcular t1 . Para ello, tendremos en cuenta que el espacio recorrido por el pulso luminoso respecto a S,
ct1 , tiene que ser igual a la distancia entre O y E, la cual es igual a d, más lo que recorre el pulso desde que se refleja
en E hasta que llega a O 0 , que es igual a d − vt1 (ver figura). Es decir:
ct1 = d + d − vt1
2d
.
c+v
⇒ t1 =
(8)
Ahora, sustituyendo (8) en (7) tenemos
t01
2d
=
c+v
r
v2
2d
1− 2 =
c
c
s
1−
1+
v
c
v
c
.
(9)
El resultado que nos pide el enunciado se obtiene sustituyendo v = c/2 en (9):
2d
t01 = √ .
c 3
12. Los sistemas de referencia S y S 0 se encuentran en la configuración estándar, con v = c/2. Dos sucesos, A y B, ocurren
en las posiciones x0A = d y x0B = 2d, en instantes t0A = 0 y t0B = d/c. ¿Qué intervalo de tiempo, medido por S, hay
entre los dos sucesos?
√
√
√
11d/(3c 3) ;
5d/(2c 3) ; × 3 d/c
Respuesta:
Aplicando la transformación de Lorentz del tiempo, tenemos:
∆t = γ(∆t0 +
v
∆x0 ),
c2
p
√
siendo v = c/2 y γ = 1/ 1 − (1/4) = 2/ 3. Ası́:
1
2
∆t = √ (∆t0 + ∆x0 ).
2c
3
Quedan por obtener los intervalos ∆t0 y ∆x0 :
∆t0 = t0B − t0A =
d
; ∆x0 = x0B − x0A = 2d − d = d.
c
Sustituyendo queda finalmente:
∆t =
7
√
3d
.
c
13. Sean A y E dos magnitudes fı́sicas de una partı́cula cuántica, siendo E la energı́a. Se mide E en un instante t y,
transcurrido un intervalo de tiempo finito ∆t desde la medida, se mide A. Finalmente, transcurrido otro intervalo de
tiempo finito ∆t0 desde la segunda medida, se vuelve a medir E. No se realiza ninguna otra medida entre t y t + ∆t,
ni entre t + ∆t y t + ∆t + ∆t0 . En general, podemos afirmar que:
El resultado de la tercera medida coincide con el de la primera, sea cual sea la magnitud fı́sica A.
El resultado de la tercera medida no coincide nunca con el de la primera, sea cual sea la magnitud fı́sica A.
× El resultado de la tercera medida coincide con el de la primera siempre que el operador asociado a la magnitud A
conmute con el operador asociado a la energı́a.
Respuesta:
Llamaremos t = 0 al instante en que se mide E por primera vez. Sea Eα el autovalor obtenido en esta medida. El
estado inmediatamente después será
ψ(x, 0) = fαE (x).
A continuación transcurre un cierto intervalo de tiempo ∆t desde la primera medida hasta la segunda, en la que se
mide A. El estado cuántico en el instante ∆t, justo antes de la medida, es
ψ antes (x, ∆t) = e−i
Eα ∆t
h̄
fαE (x).
Si el autovalor obtenido en la medida de A es el Aβ , entonces el estado inmediatamente después de la medida será:
ψ desp (x, ∆t) = gβA (x),
donde gβA (x) es el autoestado correspondiente al autovalor Aβ . Consideremos a continuación los casos siguientes:
• Los operadores asociados a A y a E conmutan.
En este caso, las dos magnitudes son compatibles y poseen una base común de vectores propios (teorema de
compatibilidad). Es decir, el estado gβA (x) coincide con fαE (x). Si este es el caso, el estado justo antes de la
tercera medida serı́a
ψ antes (x, ∆t + ∆t0 ) = e−i
Eα ∆t0
h̄
fαE (x).
Está claro que en este caso el resultado de la tercera medida será E α , es decir, coincide con el de la primera
medida, puesto que la probabilidad de obtener Eα es igual a la unidad:
P (Eα ) = |e−i
Eα ∆t0
h̄
|2 = 1.
• Los operadores asociados a A y a E NO conmutan.
En este caso, las dos magnitudes NO son compatibles y NO poseen una base común de vectores propios. Si
expresamos el estado gβA (x) en la base de la energı́a:
gβA (x) =
N
X
ci fiE (x),
1=1
el estado inmediatamente antes de la tercera medida es
ψ antes (x, ∆t + ∆t0 ) =
N
X
ci e−i
Ei ∆t0
h̄
fiE (x).
i=1
La probabilidad de obtener Eα viene dada por:
P (Eα ) = |cα e−i
Eα ∆t0
h̄
|2 = |cα |2 ,
que en general es diferente de 1.
En conclusión, la respuesta correcta es la tercera:
El resultado de la tercera medida coincide con el de la primera siempre que el operador asociado a la magnitud A
conmute con el operador asociado a la energı́a.
8
14. Sean Iˆ el operador identidad, x̂ el operador posición y p̂x el operador cantidad de movimiento. Y sean los operadores
 ≡ x̂p̂x y B̂ ≡ p̂x x̂. ¿Son compatibles  y B̂?
ˆ
Nota: Si se estima útil puede hacerse uso de la igualdad [x̂, p̂x ] = ih̄I.
× Sı́, son compatibles.
No, no son compatibles.
Se necesitan más datos.
Respuesta:
Esta cuestión se reduce a calcular el conmutador de  y B̂, ya que de acuerdo con el teorema de compatibilidad dos
operadores son compatibles si conmutan.
ˆ as¡ como la propiedad general2 :
Para calcular el conmutador vamos a utilizar el dato que nos sugieren ([x̂, p̂ x ] = ih̄I),
[âb̂, ĉ] = â[b̂, ĉ] + [â, ĉ]b̂.
(10)
Tenemos:
[Â, B̂] = [x̂p̂x , p̂x x̂] = x̂[p̂x , p̂x x̂] + [x̂, p̂x x̂]p̂x = x̂ {p̂x [p̂x , x̂] + [p̂x , p̂x ]x̂} + {p̂x [x̂, x̂] + [x̂, p̂x ]x̂} p̂x = −ih̄x̂p̂x + ih̄x̂p̂x = 0.
[Â, B̂] = 0
⇐⇒
S¡ son compatibles.
15. Sean f1E (x) y f2E (x) las dos primeras autofunciones del operador asociado a la energı́a (hamiltoniano) de una partı́cula
cuántica, a las que corresponden los autovalores πh̄ y 2πh̄ respectivamente. Sea  el operador asociado a la magnitud
A, y f1A (x) y f2A (x) sus dos primeras autofunciones, verificándose las relaciones:
f1E (x)
√
√
1 A
2 A
2
1
E
= √ f1 (x) + √ f2 (x) ; f2 (x) = √ f1A (x) − √ f2A (x)
3
3
3
3
Si la partı́cula se encuentra inicialmente (t = 0) en el estado ψ(x, 0) = f1A (x), ¿cuál es la probabilidad de obtener el
primer autovalor de  al medir A en el instante t = 1/2?
1/9 ;
× 5/9 ;
7/9
Respuesta:
De acuerdo con uno de los postulados de la mecánica cuántica, la probabilidad que nos piden viene dada por:
P rob[A = A1 ]t=1/2 = |f1A (x) ψ(x, t = 1/2)|2 .
(11)
Pero para poder usar este resultado necesitamos conocer la función de onda en el instante t = 1/2, mientras que el
dato que nos facilita el enunciado es la función de onda en el instante t = 0:
ψ(x, 0) = f1A (x).
(12)
Ahora bien, el postulado de evolución temporal3 nos permite obtener la función de onda en cualquier instante, t, si la
conocemos inicialmente:
X
ψ(x, t) =
(13)
cj e−iEj t/h̄ fjE (x).
j
Aqu¡ los Ej y fjE (x) son los autovalores y autofunciones del hamiltoniano (operador asociado a la energ¡a), y los c j
son las componentes de la función de onda inicial en la base de la energ¡a; es decir:
X
ψ(x, 0) =
cj fjE (x).
(14)
j
Por tanto, para poder usar (13) debemos poner nuestra función de onda inicial (12) en la forma (14). Para ello
invertimos4 las ecuaciones que nos dan de la base de energ¡a en la de autofunciones de Â, obteniendo:
√
1
f1A (x) = √ (f1E (x) + 2f2E (x))
3
2
;
1 √
f2A (x) = √ ( 2f1E (x) − f2E (x)).
3
Ver problema 3 de la colección de problemas del £ltimo cap¡tulo de los apuntes.
Más precisamente, la solución de la ecuación de Schrödinger.
4
Es decir, resolvemos el sistema de dos ecuaciones, con incógnitas las fjA (x) en función de las fkE (x).
3
9
(15)
Sustituyendo (15) en (13) obtenemos:
√
1
ψ(x, t) = √ (e−iθ1 f1E (x) + 2f2E (x)),
3
donde hemos usado la notación θj ≡ Ej t/h̄.
Finalmente, llevamos (15) y (16) a (11):
√
√
1
P rob[A = A1 ]t = | (f1E + 2f2E ) (e−iθ1 f1E + 2e−iθ2 f2E )|2 =
3
1
1
1
= | (e−iθ1 + 2e−iθ2 )|2 = (5 + 4 cos(θ2 − θ1 )) = (5 + 4 cos(πt)).
3
9
9
Y particularizando para t = 1/2 obtenemos el resultado:
P rob[A = A1 ]t=1/2 = 5/9.
10
(16)
SEGUNDA PARTE
16. Sobre un sistema constituido por N partı́culas no actúan fuerzas externas, y las fuerzas internas son conservativas.
Entonces, respecto a un sistema inercial, si la energı́a cinética aumenta:
La celeridad del centro de masas también lo hace.
× La energı́a potencial disminuye.
El momento cinético respecto al centro de masas aumenta.
Respuesta:
Nos dicen que no act£an fuerzas externas. Por tanto, su suma es nula y el teorema del centro de masas nos asegura
que la aceleración del centro de masas respecto de cualquier sistema inercial es nula. Es decir, la velocidad del centro
de masas permanecerá constante, por lo que concluimos que la primera afirmación es falsa.
Nos dicen que la energ¡a cinética aumenta (∆T > 0). Entonces el teorema de la energ¡a nos dice que:
∆T = W ext + W int = 0 − ∆EPint ,
Es decir, la energ¡a potencial disminuye.
Finalmente, para comprobar que la tercera afirmación es falsa, apliquemos el teorema del momento cinético en el
centro de masas (G) a nuestro sistema:
~G
dL
~ ext = 0.
=M
G
dt
~ G ) respecto al centro de masas ha de permanecer constante, en contra de la tercera
Es decir, el momento cinético (L
afirmación.
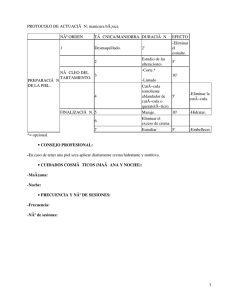
17. El bloque A, de masa MA , puede deslizar sin rozamiento por la varilla OB, de masa MB , que a su vez puede girar sin
rozamiento alrededor del origen O de los ejes inerciales “1” (el eje OX es horizontal). Sobre el extremo B de la varilla
~ , que la varilla ejerce
actúa la fuerza F~ , perpendicular a la misma. En la figura también se ha dibujado la reacción N
sobre el bloque. Entonces, la expresión matemática del teorema del centro de masas aplicado al bloque es:
F
y
~ + (MA + MB )~g = MA~aA
N
1
~ + (MA + MB )~g + F~ = MA~aA
N
1
~ + MA~g = MA~aA
× N
1
B
N
g
A
1
O
0
x
Respuesta:
El teorema del centro de masas dice que la suma de todas las fuerzas exteriores que actúan sobre el sistema es igual a
la masa total del mismo por la aceleración de su centro de masas respecto a un sistema inercial. En nuestro caso, las
fuerzas exteriores al bloque son la gravitatoria (que actúa a distancia) y la reacción de la varilla (que es de contacto).
Por tanto, la expresión matemática del teorema del centro de masas aplicado al bloque dice:
~ + MA~g = MA~aA
N
1.
(17)
18. Un punto P se mueve con celeridad v = sen2 (πt/12), y el radio de curvatura de su trayectoria vale ρ = 1/(1 − t 2 )2 ,
siendo t el tiempo. ¿Cuánto vale el módulo de la aceleración de P cuando ésta es paralela a la velocidad?
√
π/4 ;
π 2/16 ; × π/24
Respuesta:
Puesto que nos dan el radio de curvatura de la trayectoria, hemos de pensar en las componentes intr¡nsecas de la
aceleración:
~.
~a = aT T~ + aN N
11
(18)
Nos piden |~a| en el instante (t = τ ) en que ~a k, ~v ; es decir en el instante en que a N = 0. Pero aN = v 2 /ρc . Por tanto,
puesto que si v = 0 no tiene sentido hablar de un vector paralelo a la velocidad, ha de ocurrir que:
ρc (τ ) ≡ 1/(1 − τ 2 )2 = ∞
=⇒
τ = ±1.
(19)
Por otra parte, puesto que aN (τ ) = 0, tendremos:
|~a(τ )| = |aT (τ )| = |
dv(t)
π
πt
π
±π
π
|t=τ = |2 sen(πt/12) cos(πt/12)π/12|t=τ = | sen( )|t=τ = | sen(
)| =
.
dt
12
12
12
6
24
19. Una partı́cula se lanza verticalmente desde la superficie de la Tierra, alcanzando una altura máxima R T , siendo RT el
radio de la Tierra. ¿Con qué celeridad se lanzó?
Nota: considérese que el sistema de referencia ligado a Tierra es inercial y despréciese la resistencia del aire ası́ como
la influencia de otros astros. G es la constante de gravitación universal y M T es la masa de la Tierra.
p
p
p
2GMT /(5RT ) ;
3GMT /(2RT ) ; ×
GMT /RT
Respuesta:
Teniendo en cuenta las condiciones del enunciado, según las cuales se puede despreciar el rozamiento con el aire y la
influencia de otros astros, la única fuerza que actúa sobre el objeto es la gravitatoria ejercida por la Tierra. Como
esta fuerza es conservativa, podemos aplicar la conservación de la energı́a mecánica entre la situación inicial y la final
(donde la velocidad es cero). La expresión de la energı́a potencial gravitatoria es:
mMT
,
r
donde m es la masa del objeto y r su distancia al centro de la Tierra. En la situación inicial r = R T y en la situación
final r = 2RT . Por tanto:
EP = −G
mMT
1
mMT
−G
+ mv 2 = −G
RT
2
2RT
⇒
v=
r
GMT
.
RT
20. Una varilla OA, sin masa y de longitud L, puede girar libremente alrededor de un eje vertical fijo que pasa por su
extremo O. La varilla está unida al eje de modo que siempre forma 90◦ con el mismo. Inicialmente (t = 0) la varilla
gira con velocidad angular de módulo Ω mientras un insecto puntual de masa m permanece en A. En cierto instante
el insecto comienza a caminar por la varilla, deteniéndose respecto a ésta a la distancia L/2 de O. ¿Cuál es el módulo
de la velocidad angular de la varilla una vez que el insecto se ha detenido respecto a ésta?
× 4Ω ;
9Ω ;
9Ω/4
Respuesta:
Z
t=0
A
X
O
L
Mg
Tomaremos un eje OX que coincide con la varilla, y un eje OZ en la dirección del eje de rotación, y cuyo sentido
positivo coincide con el de la velocidad angular (ver figura). Aplicaremos el teorema del momento cinético (en el punto
O) al sistema formado por la varilla y el insecto:
~O
dL
~ Oext ,
=M
dt
~ ext es el momento en O de las fuerzas externas. La componente según el eje de rotación es:
donde M
O
dLO,z
ext
= MO,z
.
dt
12
Nótese que la única fuerza externa que produce momento en O es el peso del insecto, pero dicho vector es perpendicular
al eje OZ. Por tanto, se conserva la componente según OZ del momento cinético del sistema 5 . Inicialmente
~ iO,z = L~ı ∧ M ΩL~ = M ΩL2~k,
L
y el momento cinético una vez que el insecto se ha detenido a una distancia L/2 (realizando operaciones similares):
2
~ f = M L ω ~k.
L
O,z
4
Igualando:
LiO,z = LfO,z
⇒
ω = 4Ω.
21. El sistema de la figura está constituido por dos resortes idénticos, de constante elástica 2k, y el bloque, de masa m.
¿Cuál es su frecuencia angular natural (ω0 )?
p
×
k/m
p
g
k/(2m)
p
k/(4m)
Respuesta:
Los dos resortes equivalen a un £nico resorte, cuya constante elástica viene dada por 6 :
1
1
1
=
+
ke
2k 2k
=⇒
ke = k.
Por tanto, nuestro sistema equivale a un oscilador armónico de constante elástica k y masa m; y su frecuencia angular
natural será:
ω0 =
p
k/m.
22. Considérese un oscilador forzado sin rozamiento de masa unidad. La amplitud de la fuerza excitadora también es
unitaria. Denomı́nese A(ω) a la amplitud en régimen estacionario del oscilador cuando la frecuencia angular de la
fuerza excitadora es ω. Denominando ω0 a la frecuencia angular natural, y sabiendo que A(ω)/A(2ω) = 2, ¿cuánto
vale el cociente ω0 /ω?
p
√
√
×
2 ;
7/2 ;
8/5
Respuesta:
La amplitud en régimen permanente del oscilador forzado sin amortiguamiento viene dada por:
A(ω) =
F0 /m
.
|ω02 − ω 2 |
(20)
Por tanto:
A(ω̄)
=2
A(2ω̄)
⇐⇒
|
ω02 − 4ω̄ 2
|=2
ω02 − ω̄ 2
(21)
Denominando x ≡ ω0 /ω̄ al cociente que nos piden que calculemos, la ecuación (21) equivale a las siguientes dos
ecuaciones en x:
x2 − 4
= ±2.
x2 − 1
√
La ecuación con el signo positivo conduce a soluciones imaginarias, mientras que la de signo negativo lleva a x = ± 2.
Por tanto, la solución con sentido f¡sico es:
ω0 /ω̄ =
5
6
√
2.
Hay otra fuerza externa aplicada en O, cuyo efecto es que dicho punto permanezca fijo. Pero dicha fuerza no produce momento
Véase la solución a la cuestión 6.
13
23. Una onda viajera, g(x, t), se propaga en el sentido positivo del eje OX con celeridad v = 1. Sabiendo que g(x, 0) =
1/(1 − x2 )2 , ¿cuánto vale g(1, 1)?
× 1 ;
1/9 ;
1/64
Respuesta:
Como g(x, t) es una onda viajera que viaja en el sentido positivo del eje OX con celeridad v = 1; esto quiere decir que
haciendo el cambio de variable ξ = x − t nuestra onda se transforma en una función de la £nica variable ξ:
g(x, t) = f (ξ).
(22)
g(x, 0) = 1/(1 − x2 )2 .
(23)
Por otra parte, nos dicen que:
Pero para t = 0 nuestra nueva variable coincide con la variable espacial: ξ = x para t = 0. Y llevando esto a (23):
g(x, 0) = g(ξ, 0) = 1/(1 − ξ 2 )2 = f (ξ) para t = 0.
(24)
Pero como f (ξ) no depende de t, (24) es válida para cualquier otro instante:
f (ξ) = f (x − t) = 1/[1 − (x − t)2 ]2 .
(25)
Y particularizando (25) obtenemos el resultado pedido:
g(1, 1) = 1/[1 − (1 − 1)2 ]2 = 1.
24. Dos ondas armónicas de amplitud unidad, de la misma frecuencia y longitud de onda, se propagan en el mismo sentido
del eje OX. Si la diferencia entre las fases de ambas vale (en valor absoluto) 2π/3, ¿cuánto vale la amplitud de la onda
superpuesta?
√
√
× 1 ;
2 ;
3
Respuesta:
La superposición de ondas armónicas de la misma amplitud, frecuencia, longitud de onda, y que se propagan en el
mismo sentido ha sido estudiada teóricamente. Sabemos que el resultado es otra onda armónica, con las mismas
caracter¡sticas, y cuya amplitud viene dada por 2A cos(φ/2). Donde A es la amplitud de las ondas que se superponen,
y φ su diferencia de fase. En nuestro caso:
2A cos(φ/2) = 2 cos(2π/6) = 1.
25. Los frentes de onda de una onda armónica plana llegan simultáneamente a los puntos P = (0, 1, 2) y Q = (0, 3, 2), y
son paralelos al vector ~a = (1, 1, 2). Sabiendo que un frente de onda tarda en ir del punto A = (0, 1, 0) al B = (0, 1, 1)
un tiempo τ = 1, ¿cuánto vale la celeridad de la onda?
√
1/5 ; × 1/ 5 ;
1
Respuesta:
−→
Si los frentes de onda llegan simultáneamente a P y a Q significa que el vector P Q es paralelo a dichos frentes. Como
~a = (1, 1, 2) también lo es, podemos obtener la dirección de propagación de la onda (normal a los frentes de onda):
−→
~u k ~b ≡ P Q ∧ ~a = (4, 0, −2).
(26)
Por otra parte, el espacio recorrido (d) por un frente de onda para ir del punto A = (0, 1, 0) al B = (0, 1, 1) será la
−→
distancia |AB| proyectada en le dirección de propagación del frente:
−→
d = |AB · ~u|.
Y la celeridad de propagación será:
v = d/τ =
√
|(0, 0, 1) · (4, 0, −2)|
p
= 1/ 5.
2
2
1 · 4 + (−2)
14
26. Un tren viaja en lı́nea recta con velocidad constante. Ligados a la vı́a existen sendos dispositivos puntuales, A y B,
−→
tales que el vector AB tiene el mismo sentido del movimiento del tren. Según el tren, la parte delantera del mismo
(cabeza) pasa por B en el mismo instante en que la parte trasera (cola) pasa por A. Entonces, para un observador
ligado a la vı́a, la cabeza del tren pasa por B:
Antes de que la cola pase por A.
Al mismo tiempo que la cola pasa por A.
× Después de que la cola pase por A.
Respuesta:
Como casi siempre ocurre, este problema se puede resolver de distintas maneras. Empezaremos por la más sistemática,
que también es la más formal. Luego veremos otras posibilidades que no requieren cuentas, aunque s¡ un mayor control
de la materia.
Vamos con el procedimiento sistemático, que consiste en la aplicación de las transformaciones de Lorentz. Tomamos
los sistemas S y S 0 en la configuración estándar. S está ligado a las v¡as, con origen an A, y el eje AX pasando por
−→
B y con el sentido de AB.
S 0 está ligado al tren, con su origen en la cola de éste, y el eje X 0 dirigido desde la cola hacia la cabeza. Consideremos
los dos sucesos:
(1) Cola pasa por A.
(2) Cabeza pasa por B.
Por estar los sistemas en le configuración estándar deducimos que las coordenadas del suceso 1 son nulas en ambos
sistemas.
Si denotamos por L a la longitud propia del tren, entonces para el suceso 2 tenemos:
x02 = L ;
t02 = 0.
Y usando la transformación de Lorentz encontramos las coordenadas del suceso 2 en S:
x2 = γ(x02 + vt02 ) = γL
t2 = γ(t02 +
v 0
v
x ) = γ(0 + 2 L) > 0
c2 2
c
⇐⇒
Para S la cabeza pasa por B después que la cola pasó por A.
Investiguemos ahora procedimientos menos formales de resolver el problema. Imaginemos que en A (B) hubiera un
dispositivo tal que al pasar la cola (cabeza) del tren emitiera un pulso de luz. Como para el tren ambos pulsos se
emiten simultáneamente, se encontrarán en el centro del tren. ¿Cómo se ve este “encuentro de luces” desde las v¡as?
Evidentemente, desde las v¡as se ve que el encuentro ocurre en el centro del tren. Pero desde las emisiones de los
−→
pulsos el tren (visto desde las v¡as) se ha desplazado en el sentido AB. Por tanto, el encuentro se produce más cerca
de B que de A; lo que significa que el dispositivo de B emitió después que el de A. Es decir, que la cabeza del tren
pasó por B después de que la cola pasara por A.
Veamos un £ltimo procedimiento. Consideremos el tramo de v¡a AB. Para el tren la longitud de este tramo es la
longitud propia (L), puesto que el extremo A coincide con la cola al mismo tiempo (del tren) que la cabeza coincide
con B. Pero para el tren el tramo AB viaja, y por tanto está contraido: Si llamamos L AB a la longitud propia del
tramo ocurrirá que LAB > L.
Veamos ahora las cosas desde las v¡as. Desde éstas la longitud del tren está contraida, siendo L/γ < L < L AB . Por
tanto, cuando la cabeza coincide con B la cola está a la derecha7 de A. Es decir, la cola ha debido pasar antes por A.
√
27. S y S 0 se encuentran en la configuración estándar, con v = 3 c/2. Según S, cuando el origen O 0 de S 0 coincide con
el de S un punto P se encuentra en la posición del eje OX de coordenada x = L, viajando con velocidad constante
~vSP = v~ı/2. ¿En qué instante (según S 0 ) pasará P por O 0 ?
√
√
× 2L/(c 3) ;
2L/c ;
2L 3/c
Respuesta:
Podemos resolver el problema trabajando en S o en S 0 .
−→
Suponiendo que el sentido AB es de izquierda a derecha. Cosa que siempre podemos suponer, pues es cuestión de mirar el
movimiento desde el lado adecuado.
7
15
Empecemos
por S. Tenemos dos puntos móviles (O 0 y P ) que se mueven por el eje OX, persiguiendo O 0 (celeridad
√
v = c 3/2) a P (celeridad v/2).
Inicialmente (t = 0) O 0 se encuentra en le posición xO0 (0) = 0, y P se encuentra en la posición xP (0) = L.
Si llamamos t = τ al instante en que O 0 alcanza a P , tendremos:
√
(27)
xO0 (τ ) = vτ = cτ 3/2
√
v
xP (τ ) = L + τ = L + cτ 3/4.
2
Igualando ambas coordenadas obtenemos el tiempo del encuentro:
√
τ = 2L/v = 4L/(c 3).
(28)
(29)
Pero nos piden el instante del encuentro medido por S 0 . Como también conocemos la posición del encuentro en S
(basta sustituir (29) en (27) o (28)), podemos usar la transformación de Lorentz:
√
v
v
t0 = γ(t − 2 x) = γ(τ − 2 xO0 (τ )) = 2L/(c 3).
(30)
c
c
También podr¡amos habernos dado cuenta de que el tiempo que nos piden es el tiempo propio para S 0 . Por tanto,
podr¡amos obtener la respuesta usando la fórmula de dilatación del tiempo:
∆t = γ · ∆t0
=⇒
∆t0 = ∆t/γ =
√
√
4L/(c 3)
= 2L/(c 3).
2
√
28. S y S 0 se encuentran en la configuración estándar, con v = c/ 2. S 0 observa como un punto P se aleja de su origen
de coordenadas (O 0 ) en lı́nea recta que forma 45◦ con el eje O0 X 0 , y con celeridad constante de magnitud c/2. ¿Cuál
es la celeridad de P respecto de S?
√
√
√
c 39/9 ; × c 19/5 ;
c 61/8
Respuesta:
Este es un simple ejercicio de composición relativista de velocidades. Nos dan la velocidad de P en S 0 :
√
c √
~vSP0 = ( 2/2, 2/2, 0) = (u0x , u0y , u0z ).
2
(31)
Y nos piden |~vSP |. Si usamos la notación ~vSP = (ux , uy , uz ), entonces la ley de composición de velocidades toma el
aspecto:
√
√
√
u0x + v
c 2/4 + c 2/2
ux =
=
= 3c 2/5
0
2
1 + ux v/c
1 + 1/4
√
u0y
c 2/4
uy =
=√
= c/5
γ(1 + u0x v/c2 )
2(1 + 1/4)
uz =
u0z
= 0.
γ(1 + u0x v/c2 )
Finalmente,
|~vSP | =
q
(ux )2 + (uy )2 + (uz )2 =
√
c√
9 · 2 + 1 + 0 = c 19/5.
5
29. Sabiendo que
ψ(x) =
af1A (x)
+
r
2 −iθ A
e f2 (x)
3
está normalizada, que θ es una constante real, y que las fiA (x) son autofunciones normalizadas de cierto observable,
¿cuánto vale |a|?
p
√
√
× 1/ 3 ;
2/3 ;
3/2
16
Respuesta:
Impongamos que ψ(x) está normalizada:
||ψ(x)|| = 1
=⇒
ψ(x) ψ(x) = 1 =
(af1A (x)
2
= a∗ a · 1 + eiθ e−iθ · 1 = |a|2 + 2/3
3
+
r
2 −iθ A
e f2 (x)) (af1A (x) +
3
=⇒
|a| =
r
2 −iθ A
e f2 (x)) =
3
p
√
1 − 2/3 = 1/ 3.
Donde hemos tenido en cuenta que las fiA (x) están normalizadas y son ortogonales.
30. Sean f1E (x) y f2E (x) las dos primeras autofunciones del operador asociado a la energı́a (hamiltoniano) de una partı́cula
cuántica, a las que corresponden los autovalores 1 y 2 respectivamente. Sea  el operador asociado a la magnitud A,
y f1A (x) y f2A (x) sus dos primeras autofunciones, verificándose las relaciones:
√
√
1
2
2
1
f1E (x) = √ f1A (x) + √ f2A (x) ; f2E (x) = √ f1A (x) − √ f2A (x)
3
3
3
3
Si la partı́cula se encuentra inicialmente (t = 0) en el estado ψ(x, 0) = f1A (x), ¿cuál es el valor medio de la energı́a en
el instante t = 2?
4/3 ;
× 5/3 ;
7/3
Respuesta:
Sabemos que el valor medio de una magnitud f¡sica F cuyo operador asociado es F̂ , cuando el estado está determinado
por la función de onda ψ(x), viene dado por:
< F >ψ = ψ(x) (F̂ ψ(x)).
(32)
En nuestro caso el operador es el hamiltoniano, Ĥ, y el estado es el del instante t = 2, que no conocemos. Pero
conocemos el estado en el instante inicial:
ψ(x, 0) = f1A (x).
(33)
< E >ψ(x,2) = ψ(x, 2) (Ĥψ(x, 2)).
(34)
Y el valor medio que nos piden será:
Vemos que todo se reduce a calcular ψ(x, 2) conociendo ψ(x, 0). Pero esto ya lo hemos hecho en la cuestión 15,
obteniendo:
√
1
ψ(x, 2) = √ (e−iθ1 f1E (x) + 2e−iθ2 f2E (x)),
3
(35)
donde θj = Ej · 2/h̄ y Ej son los autovalores del hamiltoniano (en nuestro caso 1 y 2, respectivamente).
Sustituyendo (35) en (34):
< E >ψ(x,2) =
√
1 −iθ1 E √ −iθ2 E
(e
f1 + 2e
f2 ) (e−iθ1 f1E + 2 2e−iθ2 f2E ).
3
Donde hemos prescindido de escribir expl¡citamente la dependencia de las fjE de la variable x. Ahora podemos operar,
teniendo en cuenta la ortonormalidad de las fjE y que |e−iθj | = 1, obteniendo:
< E >ψ(x,2) =
17
1
(1 + 4) = 5/3.
3