Calibración de cinemómetros por simulación
Anuncio

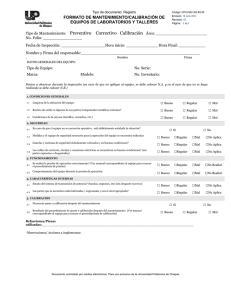
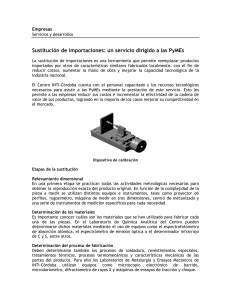
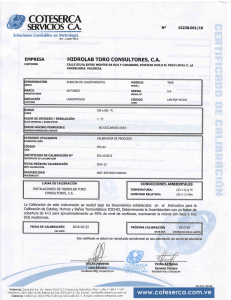
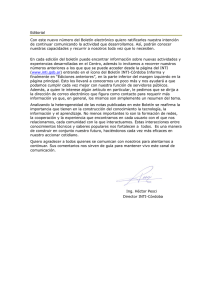
Calibración de cinemómetros por simulación Córdoba, Noviembre de 2013 Instituto Nacional de Tecnología Industrial Av. Vélez Sarsfield 1561 X5000JKC – Córdoba Teléfonos: 0351-4698304/4603974 Fax: 0351-4681021 Calibración simulada de cinemómetros ÍNDICE Punto Título Página Capítulo I I.1 I.2 I.2.a I.2.b I.2.c I.3 I.4 Capítulo II II.1 II.2 II.3 II.4 II.4.a II.4.b II.4.c II.4.d II.5 Capítulo III III.1 III.2 III.3 III.4 III.5 III.5.a III.5.b III.5.c Calibración simulada de cinemómetros con lazos inductivos Introducción a la detección mediante lazos inductivos Medición de velocidad mediante lazos inductivos Medición de velocidad con flancos ascendentes y descendentes dos lazos Medición de velocidad con flancos ascendentes de tres lazos Medición de velocidad con perfil de inductancia Calibración simulada de velocidad en cinemómetros con lazos inductivos Comentarios acerca de las limitaciones de la simulación analizada Calibración simulada de cinemómetros DOPPLER Introducción a la medición mediante efecto Doppler Calibración simulada mediante diapasón Calibración simulada mediante cámara anecoica pasiva Calibración simulada mediante reflector rotativo Introducción a la simulación mediante reflector rotativo Reflector rotativo por velocidad tangencial Reflector rotativo por frecuencia Fotografías de reflector rotativo Comentarios acerca de las limitaciones de las simulaciones analizadas Calibración simulada de cinemómetros LIDAR Introducción a la medición LIDAR Calibración simulada mediante el método de las dos distancias Calibración simulada mediante inyección de pulsos de luz Calibración simulada mediante variación simulada de distancia Comentarios acerca de las limitaciones de las simulaciones analizadas Comentarios método dos distancias Comentarios método pulsos de luz Comentarios método variación distancia 5 5 8 8 9 10 11 13 14 14 16 18 19 19 19 21 22 24 25 25 28 31 31 32 32 32 32 Página 2 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Introducción Calibración con móvil real vs. calibración simulada Necesidad de la calibración simulada Un cinemómetro puede ser calibrado con un móvil real de velocidad conocida, o también puede ser calibrado en forma simulada, utilizando diversos recursos técnicos que disparan la medición sin la presencia de un vehículo verdadero. Pero toda simulación tiene sus limitaciones, las que hacen que la evaluación que se hace del cinemómetro a través de ella nunca pueda reemplazar completamente a la calibración con móvil real. Porqué se utiliza entonces la calibración simulada? Existen básicamente dos motivos. La primera cuestión que impone la necesidad de disponer de una calibración simulada es la necesidad de ensayar los cinemómetros para la aprobación del modelo. Muchos de los ensayos a los que se debe someter a un cinemómetro a tal fin, consisten en determinar el error de medición sobre los límites de diversas variables de influencia. Así por ejemplo, se debe determinar que el error de medición esté dentro de la tolerancia establecida con la tensión de alimentación o la temperatura de operación en sus límites extremos, con condensación de humedad, bajo interferencia electromagnética, etc.. Algunos de estos ensayos pueden ser realizados en campo, midiendo la velocidad de un móvil real, pero por razones prácticas, otros no. Un ejemplo típico es el ensayo de susceptibilidad electromagnética, en el cual el cinemómetro completo debe ser sometido a un campo interferente que por razones técnicas debe ser aplicado dentro de una cámara anecoica, dentro de la cual, por razones obvias, no puede haber un vehículo real circulando. Por los motivos expuestos, algunos de los ensayos de aprobación de modelo deben realizarse en condiciones simuladas, por lo que resulta imprescindible disponer de las técnicas y el instrumental necesarios para materializar tales simulaciones. El otro motivo por el cual es necesario disponer de técnicas de simulación, es la verificación de cinemómetros de instalación fija. Los cinemómetros portátiles pueden ser transportados a un lugar adecuado para su verificación. Dicho lugar (Ej.: autódromo) presenta las condiciones necesarias para evaluar su comportamiento metrológico en todo su rango de medición. Pero los cinemómetros de instalación fija, funcionan en un lugar determinado, generalmente conectados a sensores embebidos en la calzada. El lugar de instalación tiene asociada una velocidad máxima permitida, relacionada a las condiciones del lugar. La verificación de estos equipos mediante un móvil real en todo el rango de medición del aparato es generalmente impracticable por diversos motivos. Por un lado, el móvil de prueba debería violar la máxima permitida para realizar la calibración. Si bien esta limitación podría salvarse mediante un acuerdo con la autoridad de tránsito competente y el corte del tránsito en el lugar, la existencia de un límite de velocidad no es por lo general una simple decisión administrativa, sino que está directamente relacionada a la máxima velocidad admisible de acuerdo a las condiciones de seguridad que impone la zona. Así, puede existir un abundante flujo peatonal, curvas próximas, etc., que hagan imposible o muy peligroso el tránsito de un móvil de prueba a velocidades altas. La desinstalación del cinemómetro y su transporte a un autódromo para su verificación en condiciones seguras, no es una opción válida, ya que por lo general los sensores, cuya posición y características determinan la exactitud metrológica, están embebidos en la calzada, siendo imposible su remoción y transporte a otro sitio. Por ende, en este tipo de aparatos, la solución más aceptada es la calibración con móvil real hasta la velocidad máxima permitida en el lugar de instalación y la calibración simulada de todo el rango de medición, que permite evaluar las condiciones metrológicas del aparato en la fracción del rango que no se puede alcanzar en forma segura con un móvil real. Página 3 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Limitaciones de la calibración simulada Como toda simulación de una condición real, la calibración simulada de cinemómetros tiene diversas limitaciones que se explicarán junto con el desarrollo de cada caso en el transcurso del presente trabajo. Como criterio general puede enunciarse que el cumplimiento de los límites de error permitidos como resultado de una calibración simulada, es condición necesaria pero no suficiente para concluir que el equipo es apto para ser utilizado. Página 4 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Capítulo I Calibración simulada de velocidad de cinemómetros que funcionan mediante lazos inductivos. I.1 ) Introducción a la detección de presencia vehículos por medio de lazos inductivos: El sensor es una bobina embebida en la calzada, generalmente rectangular o cuadrada, con dimensiones tales que su área suele tener un valor desde alrededor de uno, hasta varios metros cuadrados, generalmente formada por tres a cinco espiras individuales. La mencionada bobina está conectada a un módulo, generalmente denominado detector de lazo, el cual electrónicamente detecta la presencia del móvil sobre las espiras. El módulo impone a la bobina una corriente, la cual establece un campo magnético alterno en la zona de sensado. La bobina embebida en la calzada, una vez conectada al detector, pasa a formar parte de un oscilador. En ausencia de un móvil en la zona de sensado, la bobina posee una determinada inductancia, la cual da origen a una determinada frecuencia de oscilación del oscilador. Cuando hay un móvil en la zona de sensado, su masa metálica provoca una variación de la Página 5 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros inductancia de la bobina, con la consecuente variación de la frecuencia de oscilación del oscilador. Cuando la frecuencia se aparta por encima de un valor prefijado, el detector acusa la presencia del móvil en forma conveniente a los fines perseguidos, por ejemplo en base al cierre de un contacto, el cambio de estado de una salida eléctrica, o la emisión de un dato digital. El cambio que la presencia del vehículo genera en el valor de inductancia es debido principalmente a dos efectos: por un lado, el carácter predominantemente ferrromagnético de los vehículos traería aparejado un aumento de la inductancia, ya que el móvil pasa a constituir una suerte de núcleo magnético para dicha bobina. Pero por otro lado, los vehículos también son cuerpos conductores, por lo que el campo magnético alterno generado por la bobina, induce corrientes parásitas en los mismos, tales que determinan una disminución de la inductancia aparente de la bobina. Para los rangos de frecuencia normalmente utilizados por los detectores, las distancias del lazo hasta la masas metálicas, etc., el aumento de inductancia inducido por la masa ferromagnética se ve enmascarado por la disminución de la inductancia debida a las corrientes parásitas, por lo que en este tipo de sensado la presencia del móvil produce una disminución neta de la inductancia a bornes de la bobina. A los efectos de interpretar conceptualmente el fenómeno puede imaginarse que la bobina embebida en la calzada es el primario de un transformador virtual cuyo secundario está a circuito abierto cuando no hay vehículo, o está en corto-circuito cuando si lo hay. La inductancia del primario de este transformador virtual es la inductancia de la bobina embebida en la calzada. La inductancia del secundario sería la que corresponde a una espira imaginaria en corto-circuito que forma la masa metálica del vehículo. Ambas inductancias están vinculadas a través de una mutua inductancia M, cuya expresión es la siguiente: M = k L1.L 2 M = Inductancia mutua entre primario y secundario k = Factor de acoplamiento entre primario y secundario (factor adimensional que puede variar teóricamente entre 0 y 1, pero que es típicamente muy bajo en el caso presente) L1 = Inductancia del primario L2 = Inductancia del secundario Página 6 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros El circuito eléctrico equivalente de este sistema puede verse en la figura siguiente. Cuando no hay presencia de vehículo, el secundario estaría abierto y el detector de espiras vería sólo la inductancia L1 de la espira embebida. Cuando hay presencia de vehículo, la situación sería equivalente a la aparición de un secundario en corto circuito. Cuando el secundario está en corto-circuito (hay presencia de vehículo), la inductancia (L1M) queda en serie con el paralelo de M y (L2-M). El paralelo de estas dos últimas inductancias es menor que M para cualquier valor de M. Por lo tanto, la inductancia que verá el detector de espiras será menor que L1, para cualquier valor de M y de L2. Página 7 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros I.2 ) Medición de velocidad mediante lazos inductivos. En su versión más simple, la medición de la velocidad de un móvil mediante lazos inductivos, consiste en detectar la presencia del mismo en dos puntos sucesivos de su trayectoria y relacionar la distancia recorrida entre dichos puntos con el tiempo insumido. Llamando DL a la distancia entre los lazos y T al tiempo transcurrido desde la detección de presencia en el Lazo 1, hasta la detección de presencia en el Lazo 2, la velocidad media del móvil en el segmento correspondiente de su trayectoria es: V= DL/T La forma de cálculo anteriormente expuesta sólo tiene la función de apoyar la explicación. Los equipos reales utilizan diversos recursos destinados a aumentar la seguridad metrológica del resultado. Se describen a continuación algunos de ellos. I.2.a ) Medición de velocidad con flancos ascendentes y descendentes de dos lazos. Este método consiste en determinar dos velocidades, una con los flancos ascendentes de los pulsos de presencia y otra con los descendentes. En rigor, lo que se está haciendo es medir primero la velocidad de ingreso al segmento de medición y luego la velocidad de salida. Esto permite descartar las mediciones en las cuales ambos valores superan una tolerancia prefijada. La obtención de dos valores individuales, para así informar como resultado un promedio, disminuye por ese solo hecho la incertidumbre del resultado final. Pero no menos importante es la eliminación de mediciones dudosas que pueden originarse en causas imputables al móvil Página 8 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros (aceleración o frenado en zona de medición, trayectoria oblicua, etc.) o a la medición propiamente dicha (lazo dañado, baja sensibilidad de la detección, inter-modulación de los lazos, ruido, etc.). Cualquiera de estos problemas aumenta la incertidumbre de medición, pero el algoritmo de cálculo mencionado otorga la posibilidad de eliminar la mayoría de las mediciones dudosas que originan. Sólo podrían burlar el algoritmo anomalías que se reprodujeran de igual forma en ambos lazos. I.2.b ) Medición de velocidad con flancos ascendentes de tres lazos. En este caso la redundancia de la medición de velocidad se logra mediante tres lazos inductivos que el móvil estimula sucesivamente. El concepto de reaseguro metrológico de la medición es el mismo que en el caso anterior. Página 9 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros I.2.c ) Medición de velocidad con dos lazos y evaluación del perfil de inductancia. Los detectores de lazo analizados en los casos anteriores sólo tienen dos salidas posibles: presencia o ausencia de móvil. Pero en realidad la inductancia del lazo varía en forma continua a lo largo del paso del móvil. Algunos detectores de lazos almacenan dicha variación trazando una suerte de perfil de inductancia del móvil. Como ambos lazos son geométricamente iguales, los perfiles de inductancia que genera el móvil sobre los mismos son semejantes. Analizándolos digitalmente, pueden compararse puntos homólogos de ambos perfiles y realizar en base a los mismos, múltiples mediciones de velocidad como así también detectar un gran número de situaciones anómalas que conspiran contra la calidad de la medición. Algunos equipos realizan, en base a este tipo de detección, análisis complejos comparando, no sólo los dos perfiles de un mismo vehículo, sino los perfiles de numerosos vehículos a lo largo del tiempo. De esta forma, cuando por ejemplo el perfil de una espira presenta sistemáticamente una forma semejante, pero con amplitud menor que la otra espira, la electrónica puede realizar ajustes que compensan, por ejemplo, una disminución de sensibilidad. Por otro lado, si los perfiles no presentan la semejanza requerida, puede que haya más de un móvil en zona de medición, o variación de velocidad, etc. y la medición debe ser descartada. Página 10 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros I.3 ) Calibración simulada de velocidad en cinemómetros que funcionan mediante lazos inductivos. Se describe a continuación uno de varios métodos posibles para realizar la simulación. Consiste en conectar al detector de lazo un transformador, comandado por un circuito de control. El bobinado primario, que se conecta al detector, posee una inductancia igual a la inductancia nominal del lazo real embebido en la calzada. De esta forma, la condición de funcionamiento del oscilador del detector será la misma que con el lazo real. El secundario del mencionado transformador, que está normalmente abierto, se cortocircuita mediante un elemento de paso electrónico, en el momento en que se quiere simular la presencia del móvil. Este corto circuito del secundario se refleja al primario como una disminución de la inductancia, hecho que es interpretado por el detector como la presencia de un móvil sobre el lazo inductivo. En la práctica, un simulador de velocidad con capacidad de calibrar cinemómetros diversos, provistos con distinto tipo de detectores y bobinas de distinto tamaño, deberá poseer transformadores con varias derivaciones de manera de seleccionar tanto la inductancia primaria correspondiente al lazo simulado, como así también la variación de inductancia necesaria para activar correctamente el detector. Para simular una velocidad, se deberá conectar un transformador a cada una de las entradas del cinemómetro correspondientes a los lazos y aplicar a las respectivas llaves analógicas señales con duración y defasajes calculados en base a la velocidad a simular, a la distancia entre lazos, a la longitud de los lazos y a la longitud del móvil virtual. Página 11 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Ejemplo de cálculo: Sea un cinemómetro que funciona conectado a dos lazos ubicados a una distancia nominal de 5 m, con una dimensión de 2,5 m en el sentido del tránsito. Se desea simular un vehículo virtual de 5 m de longitud que transita a una velocidad de 30 km/h T1 = T2 = 5 m x 3,6 / 30 km/h = 0,6 s = 600 ms T3 = T4 = (5 m + 2,5 m) x 3,6 / 30 km/h = 0,9 s = 900 ms Página 12 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros I.4 ) Comentarios acerca de las limitaciones de método de simulación expuesto La técnica de simulación expuesta está basada en la aplicación al cinemómetro de pulsos de presencia rectangulares generados electrónicamente, perfectamente conformados para una distancia entre espiras igual a la nominal, con un ΔL/L tal (tanto en magnitud como en velocidad de crecimiento) que produce un franco cambio de estado en el detector, etc. Esto, en contraposición con la medición real, captada por espiras reales, con determinados errores geométricos (distancias entre puntos homólogos, profundidad de los lazos, alineación con la dirección del tránsito, etc.), detectando vehículos reales con distintas formas, alturas, masas metálicas, que proporcionarán flancos de crecimiento de la inductancia con pendientes menores al caso simulado, etc. El cinemómetro está conformado, desde el punto de vista metrológico, por el conjunto de los sensores, los detectores y la electrónica de cálculo de tiempos. De este conjunto, la técnica de simulación descripta evalúa completa y correctamente la electrónica de cálculo, parcialmente el funcionamiento de los detectores y directamente no evalúa los lazos inductivos. Por ende, es importante tener en cuenta las limitaciones mencionadas antes de emitir conclusiones en base a mediciones obtenidas mediante este tipo de simulación. Página 13 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Capítulo II Calibración simulada de velocidad en cinemómetros que funcionan en base a efecto Doppler II.1 ) Introducción a la medición de velocidad de vehículos por medio de efecto Doppler de radar: La tecnología de medición denominada RADAR (Radio Detecting and Ranging), según una definición general, consiste en la emisión de una onda electromagnética de muy elevada frecuencia (denominada SHF o microonda) para obtener información de presencia y posición de un blanco remoto, a través de la evaluación de la onda que el mismo refleja. Su principio de funcionamiento está basado en el efecto Doppler. El radar genera una oscilación electrónica de muy elevada frecuencia (decenas de GHz), la cual es emitida mediante una antena bajo la forma de una onda electromagnética. Cuando la radiación emitida por la antena alcanza obstáculos en su camino, se generan los consabidos fenómenos de absorción, transmisión y reflexión de la onda incidente. La magnitud relativa de los tres efectos depende de las características morfológicas y físicas del cuerpo alcanzado. El principio de funcionamiento del RADAR está basado en que parte de la radiación es reflejada por el blanco según la dirección del haz incidente, retornando por consiguiente a la antena emisora, la cual, en la mayoría de los radares modernos, también trabaja como receptora. La radiación reflejada que es captada por la antena, procesada por el equipo, permite obtener una señal relacionada a la velocidad de objetos móviles dentro del haz emitido, de la forma que a continuación se explica. Las ondas reflejadas por objetos fijos en relación a la antena, al regresar a ésta, inducen una frecuencia igual a la que poseían al ser emitidas. Página 14 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Las ondas reflejadas por objetos que se mueven en relación a la antena transmisora, al regresar a ésta, inducen una frecuencia que presenta un apartamiento de la frecuencia transmitida (efecto Doppler), que es proporcional a la componente de la velocidad relativa entre antena y móvil, según la dirección del haz de medición. Si el blanco se acerca a la antena, la onda reflejada, al inducirse en la antena, posee mayor frecuencia que la transmitida. Si el blanco se aleja de la antena, la onda reflejada, al inducirse en la antena, posee menor frecuencia que la transmitida. Por una cuestión de conveniencia técnica, la electrónica del cinemómetro no evalúa directamente la frecuencia de la onda reflejada, sino que la mezcla electrónicamente con la transmitida. Esta mezcla dará origen a un conjunto de frecuencias: las fundamentales tanto de la incidente como de la reflejada, la frecuencia suma ambas, la frecuencia diferencia, los múltiplos, como así también las armónicas de distinto orden de las mencionadas, etc.. De este conjunto se extrae por medios electrónicos la fundamental de la frecuencia diferencia o frecuencia Doppler, la cual, como resultado de la magnitud de las frecuencias de emisión habitualmente utilizadas (decenas de GHz) y los rangos de velocidad de vehículos automotores, resulta del orden de kHz y responde a siguiente expresión: FD = VB x cos α x Fe / (0,5 x VProp x 3600 ) FD : Frecuencia Doppler [Hz] VB : Velocidad del blanco [km/h] cos α: Coseno del ángulo de incidencia (Eje del lóbulo y dirección de VB) Fe : Frecuencia emitida por radar [Hz] VProp : Velocidad de propagación de la onda de radar, aproximadamente 299712,098 km/s 3600: Factor de conversión de km/h a km/s Nota: La anterior es una expresión simplificada, válida cuando VB << VProp. Página 15 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros II.2 ) Calibración simulada de velocidad con Diapasón: La onda reflejada por un objeto vibrante ubicado dentro del lóbulo del radar, posee una amplitud equivalente a la que reflejaría tal objeto sin vibrar, pero como la distancia del radar al objeto vibrante varía en forma cíclica, la fase de la onda reflejada queda modulada por la frecuencia de vibración del objeto. Si la onda incidente tiene una expresión: i (t) = I sen ωt La reflejada será del tipo: r (t) = R sen [ωt + Ф(t)] Donde Ф(t) es la variación de fase inducida en el reflejo por la vibración de diapasón, y cuya frecuencia es la frecuencia de oscilación del diapasón. Como puede observarse en el diagrama, la suma vectorial de incidente y reflejada que produce la electrónica del radar, da como resultado un vector cuya amplitud y cuya fase quedan moduladas por la frecuencia del diapasón. Como es sabido, tanto la modulación de la fase, como de la amplitud de una onda portadora, dan origen a la aparición de dos componentes espectrales, una cuya frecuencia es la de la portadora menos la frecuencia modulante, y otra cuya frecuencia es la suma de ambas frecuencias. Estas componentes cuya frecuencia está apartada de la onda emitida, independientemente de cual sea el origen del apartamiento, serán interpretadas por la electrónica del radar como frecuencias Doppler, y convertidas en velocidad equivalente para ser luego exhibidas como resultado de medición. Página 16 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Ejemplo de radar Doppler con dos diapasones para su control Cálculo de velocidad equivalente de los diapasones en función de su frecuencia de resonancia: FD = VB x cos α x Fe / (0,5 x VProp x 3600 ) VB = FD x 0,5 x VProp x 3600 / (cos α x Fe) Ambos diapasones están construidos para una frecuencia de radar de 24,150 GHz correspondiente a la banda K (24,050 a 24,250 GHz) y el cinemómetro está diseñado para trabajar con ángulo de incidencia nulo: VB1 = 4951 x 0,5 x 299712,098VProp x 3600 / (1 x 2415000000)= 110,6 km/h VB2 = 2028 x 0,5 x 299712,098VProp x 3600 / (1 x 2415000000)= 45,3 km/h Página 17 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros II.3 ) Calibración simulada de velocidad con cámara anecoica pasiva: La cámara posee un transceptor que recibe la señal emitida por el radar, la modula en amplitud con una señal de audio que se le inyecta, y la refleja nuevamente hacia el radar. El reflejo que recibe el radar posee, por lo tanto, una frecuencia igual a la emitida, pero una amplitud que está modulada según la frecuencia que se inyecta al transceptor. La onda reflejada contendrá en su composición espectral, entre otras, una frecuencia igual a la suma de la frecuencia emitida más la frecuencia de modulación y otra frecuencia igual a la diferencia de la frecuencia emitida y la frecuencia de modulación. Estas componentes cuyas frecuencias están apartadas de la frecuencia emitida, son equivalentes, para la electrónica del radar, a reflejos con frecuencia desplazada provenientes de blancos móviles. Estas últimas frecuencias serán extraídas por la electrónica del radar, el que las interpretará como frecuencias Doppler y las convertirá en velocidad equivalente para ser exhibidas como resultado de medición. Generador de audio Transceptor Cámara anecoica Cinemómetro a verificar Abertura de ingreso de señal Para simular una velocidad determinada, se debe calcular la frecuencia Doppler correspondiente, la que es función de la velocidad a simular y de la frecuencia emitida por el radar a verificar, e inyectar esta frecuencia al transceptor. Página 18 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros II.4 ) Calibración simulada de velocidad mediante reflector rotativo II.4.a ) Introducción: El reflector rotativo es un disco dotado de un conjunto de pernos en su periferia, paralelos al eje de giro, formando una suerte de “jaula de ardilla”. El disco funciona dentro de un gabinete, el que presenta una abertura que expone sólo un sector del disco, por ejemplo: Con esta configuración, ubicando la antena de radar en posición adecuada en el mismo plano de giro del disco, el haz emitido por la antena impactará sólo sobre el conjunto de pernos que emergen del gabinete, los cuales, al girar el disco, presentan una componente de velocidad neta según la dirección de medición. II.4.b ) Calibración simulada de velocidad mediante reflector rotativo por velocidad tangencial: Si el disco está construido de forma tal que la distancia entre pernos sea igual a la longitud de onda correspondiente a la frecuencia incidente, los reflejos individuales de los pernos se suman en fase, dando un reflejo resultante de amplitud suficiente como para que el radar pueda detectarlo como un objeto móvil que se desplaza a una velocidad igual a la velocidad tangencial de los pernos: Página 19 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Ejemplo de cálculo: Sea un simulador para un radar Doppler con frecuencia de emisión de 24,125 GHz (contenido en la banda K, de 24,050 a 24,250 GHz), con un ángulo de incidencia α = 20º: La longitud de onda responde a la siguiente expresión: VProp = λ x Fe → λ = VProp/ Fe λ =299712,098 km/s /24,125 GHz = 0,299712098 x 1012 mm/s / 24,125 x 109 Hz = 12,423 mm λ: Longitud de onda correspondiente a la portadora [mm] VProp : Velocidad de propagación de la onda de radar, aproximadamente 299712,098 km/s Fe : Frecuencia de emisión del radar [Hz] Por consiguiente, los pernos del disco deben estar distanciados a 12,423 mm. Suponiendo que los pernos están ubicados en el disco, según una circunferencia de 190 mm diámetro: Vpernos = π x D x Vang La velocidad angular necesaria para simular una velocidad determinada resulta: Vang = Vpernos / π x D Vpernos = Velocidad tangencial de los pernos D = Diámetro de giro de los pernos Vang = Velocidad angular del disco Ajustando unidades: Vang [r.p.s] = Vpernos [km/h]/ 3,6 x 3,14 x 190 mm x 10-3 = 0.465 x Vpernos [km/h] Vang [r.p.m] =60 x 0.465 x Vpernos [km/h] = 27,92 x Vpernos [km/h] 3,6: Factor de conversión de km/h a m/s 10-3: Factor de conversión de mm a m Por otro lado debe tenerse en cuenta el ángulo de incidencia. Cuando el radar está diseñado para operar con ángulo de incidencia cero, la velocidad que el mismo exhibe como resultado de medición es directamente la velocidad que corresponde a la frecuencia Doppler detectada. Pero cuando el radar está diseñado para operar con un ángulo de incidencia distinto de cero, no mide la velocidad real del móvil, sino la componente de la misma según la dirección de medición. Por lo tanto, la frecuencia Doppler que mide, no es la correspondiente a la velocidad real del blanco, sino a la componente de la misma según la dirección de medición, la cual es la velocidad real multiplicada por el coseno del ángulo de incidencia. Por este motivo, el radar no exhibe directamente la velocidad sensada, sino el resultado de dividir la velocidad sensada por el coseno del ángulo de incidencia. Por este motivo, en un simulador destinado a este tipo de aparatos, la velocidad tangencial de los pernos no se hace igual a la velocidad simulada del blanco, sino a la velocidad del blanco que se desea simular, multiplicada por el coseno del ángulo de incidencia. Dicho de otra forma, la velocidad de los pernos debe ser igual a la componente que tendría la velocidad del blanco que se desea simular, proyectada sobre la dirección de medición, tal como ocurre en el funcionamiento real del aparato. Vpernos = VB x cos α Reemplazando en la fórmula correspondiente la velocidad angular del simulador debe ser: Vang [r.p.s] = 0,465 x Vpernos [km/h] = 0,465 x cos α x VB= 0,437 x VB Vang [r.p.m] = 27,92 x Vpernos [km/h] = 27,92 x cos α x VB [km/h] = 26,22 x VB VB : Velocidad del blanco [km/h] Página 20 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros II.4.c ) Calibración simulada de velocidad mediante reflector rotativo por frecuencia: En este caso los pernos no están distanciados a la longitud de onda, sino a una distancia adecuada como para que vistos desde un punto ubicado a una cierta distancia y coplanar con el disco rotante, el espacio aparente entre algunos de los pernos más próximos al observador sea suficiente como para que por dicho espacio se puedan ver los pernos más lejanos: Con una distancia adecuada entre pernos, diámetros adecuados de pernos y disco, y una adecuada ubicación del radar, en una posición determinada del disco el mismo presenta a la onda incidente una vista como la que muestra el siguiente esquema, donde por los espacios entre los pernos más próximos pueden verse los pernos más alejados: Y en otra posición del disco, los pernos más próximos ocultan a los más alejados: Al girar el disco, en el lóbulo del radar alternativamente “aparecen” y “desaparecen” los pernos más alejados. Cuando el disco gira un paso (es decir un ángulo de 360º dividido por el número de pernos en toda la circunferencia) los pernos más alejados aparecen y desaparecen dos veces. Esto se debe a que cuando los pernos más cercanos “suben” los pernos más alejados “bajan” en la misma proporción (o viceversa), por lo que basta un giro de medio paso para que los pernos más alejados pasen del estado totalmente tapado a totalmente descubierto. El efecto descripto induce una alternancia combinada de amplitud y fase en el reflejo, lo que el radar detecta como una frecuencia Doppler igual a la frecuencia de alternancia. Como por cada paso hay dos cambios, en cada revolución del disco se producirá un número de cambios igual al doble del número de pernos. La frecuencia en Hz asociada al fenómeno físico es, por consiguiente, dos veces el número de pernos, por la velocidad angular del disco expresada en r.p.s.: FD = 2 x Número de pernos x Vang [r.p.s.] Página 21 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Por otro lado la frecuencia Doppler para un radar responde a la siguiente expresión: FD = VB x cos α x Fe / (0,5 x VProp x 3600 ) FD : Frecuencia Doppler [Hz] VB : Velocidad del blanco [km/h] cos α: Coseno del ángulo de incidencia (Eje del lóbulo y dirección de VB) Fe : Frecuencia de emisón del radar [Hz] VProp : Velocidad de propagación de la onda de radar, aproximadamente 299712,098 km/s 3600: Factor de conversión de km/h a km/s Igualando ambas expresiones se obtiene la velocidad de giro que debe tener el disco en función de la velocidad simulada: Vgiro= VB x cos α x Fe / ( VProp x 3600 x Número de pernos ) Vgiro = Velocidad de giro del disco [r.p.s.] Ejemplo de cálculo: Sea un simulador con 72 pernos, destinado a un radar con portadora de 34,3 GHz y ángulo de incidencia α = 22º: FD [Hz]= VB [km/h] x 0,92718 x 34,3 x 109 / (0,5 x 299712,098 x 3600) = 58,95 x VB [km/h] Vgiro [r.p.s] = VB [km/h] x 0,92718 x 34,3 x 109 / (299712,098 x 3600 x 72) = 0,40937 x VB [km/h] Vg [r.p.m.] = 24,563 x VB [km/h] II.4.d ) Fotografías de un simulador con reflector rotativo: Página 22 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Vista del reflector en la posición en la que los pernos cercanos dejan ver los pernos lejanos: Vista del reflector en la posición en la que los pernos cercanos tapan los pernos lejanos: Página 23 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros II.5 ) Comentarios acerca de las limitaciones de los métodos de simulación Doppler II.5.a ) Diapasón Si un radar Doppler emite un resultado correcto al ser evaluado con un diapasón, esto implica que hay emisión y recepción de onda y que la conversión de frecuencia Doppler a velocidad que realiza la electrónica es correcta. Pero si la frecuencia de emisión estuviera apartada del valor nominal, este hecho no podría ser detectado por el diapasón. La conversión de frecuencia Doppler a velocidad que realiza la electrónica, está suponiendo que la frecuencia de emisión es la nominal. Si esto no es cierto, el resultado de medición presentaría un error porcentual idéntico al error porcentual de la frecuencia emitida. Por otro lado, si la potencia de emisión está muy baja por problemas técnicos del aparato, es posible que la verificación con diapasón arroje un resultado correcto, pero que la medición real no cumpla la tolerancia por una mala relación señal ruido. II.5.b ) Cámara anecoica pasiva En este caso las limitaciones son las mismas que con el diapasón. II.5.c ) Reflector rotativo por velocidad tangencial En este caso, como se está midiendo la velocidad real de un cuerpo físico, una medición correcta implica que hay emisión y recepción de onda, que son correctas tanto la frecuencia de emisión como la conversión de frecuencia Doppler a velocidad del blanco. Esta es la simulación más representativa de la medición real. La única limitación es que dada la proximidad del reflector, podría obtenerse un resultado correcto aún con una potencia de emisión baja, la cual podría arrojar mediciones incorrectas sobre blancos verdaderos por una baja relación señal ruido. II.5.d ) Reflector rotativo por frecuencia Las mismas consideraciones que los casos a y b. Página 24 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Capítulo III Calibración simulada de velocidad en cinemómetros que funcionan en base a tecnología LIDAR III.1 ) Introducción a la medición de velocidad de vehículos por medio de láser Para la medición de velocidad del blanco estos cinemómetros utilizan la técnica denominada LIDAR (Light Detecting And Ranging), la cual, según una definición general, consiste en la obtención de información de presencia y posición de un blanco remoto mediante la emisión de luz y la posterior captación y evaluación del reflejo de la misma, proveniente del mencionado blanco. Estos cinemómetros calculan la distancia al blanco en base al tiempo transcurrido entre la emisión de un breve pulso de luz, y la recepción del reflejo de dicho pulso proveniente del blanco, basándose en que la velocidad de la luz puede considerarse, a estos efectos, una constante. Dicho tiempo se denomina “tiempo de vuelo” y es el tiempo que le toma al haz ir hasta el blanco y volver, es decir, el tiempo que le insume a la luz recorrer una distancia igual al doble de la que existe desde el cinemómetro al blanco. A los efectos de otorgar a la medición una serie de atributos necesarios como selectividad, alcance, inmunidad a interferencias, etc., estos cinemómetros emplean como luz emitida un haz LASER (Light Amplification by Stimulated Emission of Radiation). La utilización de la tecnología LASER permite emitir un haz muy estrecho de luz coherente y monocromática. La estrechez y coherencia hacen que, aún luego de haber recorrido distancias considerables en relación a la finalidad de la medición, el haz emitido siga poseyendo una apertura compatible con las dimensiones físicas del blanco a ser evaluado, lo cual permite que la medición sea todavía selectiva. Por otro lado, la mencionada coherencia determina una baja atenuación en función de la distancia, no requiriéndose, por tal motivo, potencias grandes de emisión para alcanzar blancos distantes. El carácter monocromático de la luz emitida permite obtener una gran inmunidad a la posible interferencia proveniente de otras fuentes, como la luz ambiente, faros de los vehículos, etc., utilizando, en la recepción, filtros de banda estrecha, Página 25 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros tales que permiten el pasaje del angosto espectro del LASER, pero impiden el sensado de toda otra longitud de onda. Las emisiones LASER de estos cinemómetros poseen una longitud de onda tal que los sitúa en el rango del infrarrojo cercano resultando, por lo tanto, invisibles al ojo humano, con el fin de no producir efectos indeseados sobre las personas, especialmente, sobre los conductores de los vehículos. La medición de velocidad del blanco se obtiene en base a sucesivas mediciones de distancia, realizadas según intervalos de tiempo conocidos. Relacionando el incremento o decremento de la distancia al blanco, con el tiempo entre mediciones, el aparato calcula la magnitud de la componente de la velocidad del blanco según la dirección de medición y también determina su sentido. Nota: los diagramas temporales anteriores tienen por única finalidad exponer didácticamente el funcionamiento y presentan escalas totalmente distorsionadas. En la realidad tanto la duración de los pulsos (del orden de decenas de ns), como los tiempos de vuelo (Ej.: 1 μs para 150 m), son extremadamente breves en relación al período entre pulsos (Ej.: 10 ms). Página 26 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Los pulsos de láser son emitidos según una frecuencia que varía según los diseños, pero que es del orden de 100-200 pulsos por segundo. El tiempo típico que insume una medición de velocidad es del orden de 0,4 s, por lo que también típicamente, un resultado de medición de velocidad se obtiene en base a varias decenas de mediciones individuales de tiempos de vuelo. Como el blanco está en movimiento, y como el aparato se apunta por lo general manualmente, el haz láser impacta en puntos distintos del blanco lo que introduce ruido a la medición. Por tal motivo en la práctica no se emite resultado en función de mediciones individuales, sino que se analiza un conjunto de mediciones a lo largo del tiempo, aplicando diversos algoritmos de corrección. Por ejemplo, se calcula la desviación standard del conjunto de mediciones, y se descartan aquellas mediciones individuales que se aparten más de dos desviaciones standard del promedio. Luego se obtiene el resultado en función del método de los cuadrados mínimos. Por otro lado, si no obtiene un número mínimo de mediciones coherentes, el aparato no emite resultado. Esto hace que cuando la condición de medición es desfavorable (lluvia, polvo, movimiento del operador por viento, móvil transitando camino irregular, etc.) el aparato demore más de 0,4 s en emitir el resultado, o directamente no arroje medición alguna. Página 27 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros III.2 ) Calibración simulada de velocidad en cinemómetros LIDAR en base al método fr la medición de distancia Como se dijo, el LIDAR calcula la velocidad en base a sucesivas mediciones de distancia efectuadas según tiempos conocidos y a un procesamiento matemático posterior de los resultados. Por razones obvias, la complejidad tecnológica asociada al proceso completo de medición está concentrada en las mediciones de distancia y frente a esto, el proceso posterior de cálculo es de poca trascendencia tecnológica. Por tal motivo, si bien una correcta medición de distancia es condición necesaria pero no suficiente para una correcta medición de velocidad, existe una alta probabilidad de que si el aparato mide correctamente la distancia, la medición de velocidad sea también correcta. En esto se basa el método de simulación por medición de distancia. El método consiste en dejar el cinemómetro en punto fijo del espacio, y hacer que mida dos distancias, adecuadamente elegidas para que la simulación sea representativa de las condiciones normales de uso del aparato. A tal efecto se eligen dos blancos que presentan al cinemómetro caras planas y verticales, que se ubican de forma que queden perpendiculares al haz de medición: Se utilizan dos blancos en lugar de uno por las razones que se analizan a continuación. Como se explicó anteriormente el aparato no emite resultado en base a dos mediciones de distancia, sino que procesa varias decenas de mediciones sucesivas. La realización de estas mediciones insume un tiempo (el tiempo típico es de 0,4 s) durante el cual el móvil se desplaza una distancia que depende de su velocidad. O sea que la medición comienza cuando el móvil se encuentra a una distancia, y termina 0,4 s después, cuando el móvil ya se encuentra a otra distancia del cinemómetro. La utilización de dos blancos simula las dos posiciones extremas que el móvil ocupa al comienzo y al final de la medición. Pero hay un motivo más importante que conduce a utilizar para la simulación la diferencia de distancia entre blancos y no la distancia absoluta a un solo blanco. Como los cinemómetros no están diseñados específicamente para medir distancia sino variación de distancia, el punto de origen de dicha medición suele ser incierto. Como el cinemómetro en sí mismo tiene una cierta longitud según la dirección de medición, cuando se mide una sola distancia, no está claro si el origen de la medición es el emisor láser, la posición de las ópticas, el centro del gabinete, etc. Para evitar este error de simulación el método utiliza la distancia de blanco a blanco, es decir la diferencia entre las distancias medidas desde el cinemómetro hasta cada blanco, como forma de cancelar la indefinición del punto de origen de la medición. Página 28 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros En resumen, la distancia de blanco a blanco se elige de forma tal que sea representativa de la distancia recorrida por el móvil en el transcurso de una medición: V = Velocidad del blanco en m/s D12 = V .0,4 s Por ejemplo, para V=150 km/h, D12=16,7 m Por otro lado, la distancia al primer blanco se elige de forma que sea representativa de la distancia habitual de trabajo (Ej.: 70 m cuando se realiza captura fotográfica del blanco además de la medición de velocidad). El tamaño del blanco debe ser tal que cumpla dos condiciones. Por un lado, debe ser compatible con el diámetro del haz a la distancia de trabajo. La divergencia típica de los láseres que se usan para este fin es de 3 miliradianes, lo que implica que el haz puede tener, por ejemplo, un diámetro de unos 30 cm a 100 m de distancia. El tamaño del blanco debe ser tal que contenga al haz de medición. Pero no debe ser mucho mayor, ya que si excede demasiado el tamaño del haz, se enmascaran problemas de alineación de la pistola. Las pistolas láser proyectan en un semi-espejo una marca que indica al operador la zona de impacto de haz sobre el blanco. Si esta marca no está correctamente alineada, el operador apunta una zona y el haz impacta en otra. Esto puede traer como consecuencia que una parte de haz impacta fuera del blanco, condición ésta que lleva a una medición de baja calidad. Si el blanco que se usa en la simulación tiene un tamaño parecido al de haz a la distancia de trabajo, el desalineamiento se hará evidente durante los trabajos de simulación e indicará la necesidad de alinear la óptica. Finalmente, el método consiste en lo siguiente: se miden D1 y D12 mediante un elemento de referencia (Ej.: cinta métrica calibrada). Seguidamente, se miden D1 y D2 mediante el cinemómetro. Mediante estos valores se realizan los siguientes cálculos: δD e[%] = 100 12 D12 R e[%] = Error porcentual de la medición de incremento de distancia del cinemómetro δD12 = D12 M − D12 R = Error de medición de la distancia entre blancos cometido por el cinemómetro. D12 R = Distancia de blanco a blanco, medida con el elemento de referencia D12 M = D2 M − D1M = Distancia de blanco a blanco, medida con el cinemómetro D1M = Distancia del cinemómetro al blanco 1 medida por el cinemómetro D2 M = Distancia del cinemómetro al blanco 2 medida por el cinemómetro Página 29 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros Tomando como cierto que el error porcentual de velocidad será del mismo orden que el error porcentual de distancia: δD e[%] = V 12 e[Velocidad ] = V . 100 D12 R Si se utiliza una distancia entre blancos tal que: D12 R = V .TM V = Velocidad simulada TM = Tiempo mínimo de medición del cinemómetro Resulta que: δD e[m / s ] = 12 TM D12 [m] TM [s ] δD12 D12 [m] TM [s ] TM Por lo tanto si la distancia entre blancos utilizada para cada velocidad simulada se calcula con la fórmula D12 R = V .TM , el error en unidades de velocidad es función solamente del error de distancia y el tiempo de medición. e[km / h] = 3,6 Ejemplo: V = 100 km/h TM = 0,4 s D12 R = 11,11 m D12 M = 11,0 m 11,11 − 11,0 e[%] = 100 = 0,99% 11,11 e[%] e[km / h] = 100km / h. = 0,99km / h 100 11,11 − 11,0 e[km / h] = 3,6 = 0,99km / h 0,4 16,8 − 16,66 e[m / s ] = = 0,35m / s 0,4 s Observación: Por lo general, la digitalización de los tiempos de vuelo del haz es tal que los cinemómetros presentan una resolución de 0,1 m para la medición de distancia. Algunos aparatos más sofisticados pueden resolver hasta 0,01 m. Por otro lado algunos aparatos exhiben la medición de distancia con una resolución de 1 m. Pero estos últimos aparatos, en su procesamiento interno necesariamente tienen el dato de la distancia con una resolución mejor, ya que como se observa a partir del resultado de los cálculos realizados, es necesaria una incertidumbre de distancia de 0,1 m para que la incertidumbre de velocidad sea del 1 %. Esta incertidumbre de medición de distancia está obviamente relacionada a la incertidumbre de medición del tiempo de vuelo, que está relacionada a su vez con el período de digitalización de dicho tiempo. Para resolver 0,1 m en la distancia cinemómetro-blanco, hay que resolver 0,2 m en el camino cinemómetro-blanco-cinemómetro que recorre la luz. Para que una cuenta del contador de tiempo de vuelo represente 0,2 m, el período del oscilador debe ser de: 0,2m 0,2m c=velocidad de la luz Per = = = 0,66ns c 300000000m / s Página 30 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros III.3 ) Método en base a la estimulación con pulsos de luz generados externamente. Este método consiste en la recepción de los pulsos emitidos desde la óptica emisora del cinemómetro, y la generación pulsos de luz según una relación temporal adecuada, tales que aplicados a la óptica receptora del cinemómetro, sean interpretados por éste como el reflejo de un móvil a una velocidad determinada. III.4 ) Método de la variación simulada de distancia. Si en lugar de apuntar hacia un blanco móvil con el cinemómetro láser, se apunta hacia una superficie plana y se mueve el cinemómetro de forma que la distancia medida hasta el punto de impacto del haz sea continuamente creciente o decreciente, el cinemómetro arrojará un resultado de velocidad. Esto ocurre moviendo el cinemómetro, o moviendo un espejo que cambie convenientemente la trayectoria del haz. En resumen, este método consiste en apuntar el cinemómetro a un espejo que refleja el haz emitido sobre una superficie plana de tamaño suficiente. El espejo comandado por un servomotor, varía gradualmente el ángulo de incidencia del haz láser, de forma tal que el haz impacta la superficie plana en puntos cada vez más alejados o más cercanos. El espejo es comandado electrónicamente de forma tal que la variación de la distancia del cinemómetro al punto de impacto sea lineal, para que el cinemómetro interprete que la velocidad es constante. Página 31 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013 Calibración simulada de cinemómetros III.5 ) Comentarios acerca de las limitaciones de los métodos de simulación expuestos. III.5.a ) Método de la medición de dos distancias. Es un método de fácil implementación, evalúa tanto la alineación como la correcta medición de distancia y en ambos casos, en forma representativa de las distancias usuales de operación. Pero el método es estático por lo que no simula la verdadera magnitud medida. Por otro lado, en ciertos aparatos su implementación choca con algunas dificultades prácticas. Si bien todos los cinemómetros láser determinan la velocidad en base a mediciones de distancia, no todos los aparatos pueden ser programados para que la medición de distancia sea exhibida en el display y quede así accesible al operador. Además, en algunos casos la medición de distancia es exhibida con una resolución insuficiente como para que sirva para determinar si el aparato mide con una incertidumbre adecuada a las exigencias. Una forma de salvar estos problemas es utilizar la salida digital del cinemómetro, que cuando el aparato la posee, suele brindar el dato de la distancia de la forma necesaria para aplicar el método. En otros casos, programando adecuadamente el aparato, es posible obtener por la salida digital ya sea el tiempo de vuelo del haz, o el número de cuentas del contador de tiempo de vuelo, dato que permite a través de los cálculos correspondientes, obtener la magnitud deseada. III.5.b ) Método de la aplicación de pulsos de luz. Este método tiene la virtud de simular la verdadera magnitud que se quiere evaluar, que es la velocidad, pero la implementación es costosa. Por otro lado, no pone a prueba la alineación ni el alcance del aparato. Un aparato con poco alcance podría arrojar resultados correctos al ser sometido a esta simulación, aunque midiera fuera de tolerancia con vehículos reales. III.5.c ) Método de la variación de distancia simulada. Este método también simula la verdadera magnitud a controlar, pero no evalúa la alineación y su implementación de forma que represente distancias normales de trabajo es complicada. Por otro lado, la simulación de velocidades altas implica la necesidad de disponer de superficies planas grandes. Para simular una velocidad de 100 km/h, la superficie que se utiliza para blanco debe tener más de 10 m. Página 32 Información técnica elaborada en INTI-Córdoba – Ing. Roberto L. Muñoz- rmunoz@inti.gob.ar Noviembre 2013