00214
Anuncio

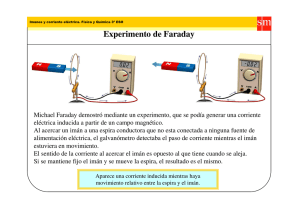
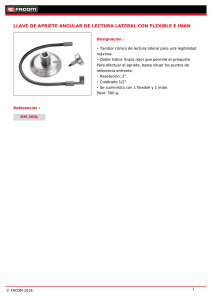
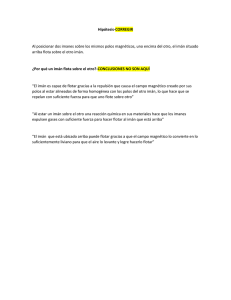
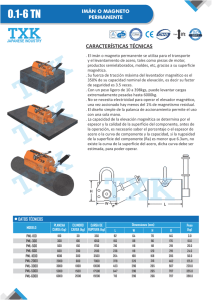
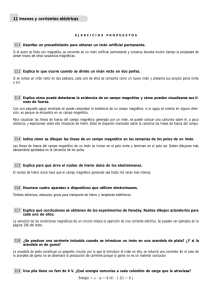
Memorias II Congreso Latinoamericano de Ingeniería Biomédica, Habana 2001, Mayo 23 al 25, 2001, La Habana, Cuba METODOLOGÍA PARA EL DISEÑO DE UN IMÁN RESISTIVO PARA RESONANCIA MAGNÉTICA DE IMÁGENES Héctor Sánchez López, Carlos Garrido Salmon, Carlos Cabal Mirabal Centro de Biofísica Médica Patricio Lumumba s/n,Universidad de Oriente,Santiago de Cuba 90500. Cuba,E-Mail: hsanchez@cbm.uo.edu.cu RESUMEN Se describe una metodología para el diseño de un imán resistivo para una máquina de Resonancia Magnética de Imágenes. Partiendo de la inversión de la corriente, asociando a cada parámetro una función fuzzy y aplicando un algoritmo de optimización estocástico se determina las dimensiones geométricas y posiciones de los enrollados de un imán para generar un campo magnético uniforme en una región de interés. Se estudia la competencia entre los parámetros y se selecciona la función objetivo más conveniente para el diseño del imán. Se analiza la estabilidad de las soluciones. El imán obtenido genera 0.1 Tesla y produce una homogeneidad de 70 ppm en 40 dvs. La metodología permite obtener un imán compacto y eficiente. Detalles de la metodología, así como la discusión de los resultados se presentan en el trabajo. Palabras clave: imán resistivo, optimización, método inverso. 1. INTRODUCCIÓN En los experimentos de Resonancia Magnética de Imágenes (RMI) es necesario la presencia de un campo magnético estable y uniforme (algunas partes por millón ppm en un volumen equivalente a la muestra en estudio). También otros requerimientos eléctricos y mecánicos se tienen que tomar en consideración para obtener un buen diseño del dispositivo magnético [1]. Alta homogeneidad, alta eficiencia, bajo campo magnético asociado al imán, amplio acceso libre a la zona del experimento, bajo costo y baja pérdida resistiva son algunos de los parámetros que caracterizan una configuración aceptable. Diseñar un imán resistivo para RMI es una tarea complicada, en la cual se trata de satisfacer todos los objetivos simultáneamente. La satisfacción de un parámetro influye en el detrimento de otro pudiendo ser incluso mutuamente exclusivos [2]. Entonces, la tarea consiste en buscar las dimensiones geométricas óptimas del sistema de bobinas de forma tal que el campo generado sea homogéneo y al mismo tiempo cumpla con los requerimientos eléctricos y mecánicos. Diversas iniciativas se han presentado para resolver este problema. Los primeros intentos fueron realizados por Garret [3]. En 1990 Lugansky utilizó optimización no lineal para encontrar un conjunto de N bobinas que minimiza el Error Cuadrático Medio (ECM) del campo magnético en la Región de Interés (RI) pero este procedimiento no incluye la optimización de los parámetros eléctricos y mecánicos del imán [4]. Otra variante ha sido emplear Target Field, donde el diseño es obtenido a partir de la especificación del campo magnético deseado dentro de una RI, sin embargo en esta aproximación se obtiene una geometría fija de la bobina y no permite optimizar los radios y las posiciones [5]. Pissaneztky introdujo un método que minimizando el ECM del campo bajo fuertes restricciones a la corriente obtiene dentro de un mismo enrollado un conjunto de espiras con corrientes similares [6]. Aunque es un método poderoso incluye un alto costo del sistema debido a la cancelación del campo producto al cambio de dirección de las corrientes. Recientemente otros autores han utilizado para el diseño de estos dispositivos algoritmos numéricos de optimización estocásticos [7]. Los objetivos se expresan a través de la suma sopesada de cada uno de los parámetros a optimizar sin realizar un análisis previo de la competencia entre ellos [7]. La selección correcta del parámetro de sopesamiento, es una tarea difícil la cual está en dependencia de la experiencia del diseñador [8]. En este trabajo se propone un procedimiento para optimizar un imán resistivo para RMI. Partiendo de la solución del método inverso se encuentran las posiciones iniciales de las bobinas, las cuales son introducidas al algoritmo de optimización estocástico como aproximación inicial. Se realizan tres etapas de diseño hasta llegar a la configuración real donde son convertidas el número de vueltas reales en entero. Utilizando lógica fuzzy cada uno de los parámetros es normalizado y asociado a una función de pertenencia [2]. Se utilizan varias funciones objetivos para realizar un estudio de la influencia de cada uno de los parámetros y seleccionar la idónea para el diseño del imán. Se realiza un análisis de la estabilidad de las soluciones. Este método permite obtener un electroimán compacto y eficiente que genera 0.1 Tesla con una homogeneidad pico-pico de 70 ppm en 40 dvs. 2. METODOLOGÍA La figura 1, muestra la geometría a utilizar en nuestro trabajo. La componente axial de la densidad de flujo magnético producido por un solenoide en la RI, expresada en coordenadas esféricas viene dada por: ∞ B z (r , θ ) = ∑ C n ⋅ r n ⋅ Pn (cos θ ) (1) n =0 donde Cn son las amplitudes de los armónicos zonales y Pn son funciones de Legendre de orden n. Por razones de simetría los armónicos de orden impar se anulan, al disponer los ciclos con corrientes simétricas. Una condición suficiente para la generación de un campo magnético homogéneo es que los coeficientes Cn sean cero. Por esta razón, el proceso de diseño teórico está centrado en minimizar o anular la mayor cantidad de armónicos zonales que están asociado al comportamiento espacial en la expansión. 950-7132-57-5 (c) 2001, Sociedad Cubana de Bioingeniería, artículo 00214 r ... 1k I2 a1 ... IK Ik a2 ak RI El problema se plantea de la siguiente manera: min F(x) aK (4) x ∈ℜn z zk Fig.1. Nomenclatura de K ciclos con corrientes simétricas. La RI se muestra con líneas discontinuas y es un región libre de fuentes de corriente. A. Metodología de diseño del imán. El primer paso que se propone en este trabajo es obtener, a través del método de la seudo-inversión matricial presentado en [9], la cantidad, posición y corriente de los ciclos de corriente para generar el campo magnético deseado. Para este fin se sitúan a un radio ak un conjunto de bobinas K, (fig. 1) de forma tal que cubran la posible longitud total del imán. Típicamente usamos de 50-100 ciclos para asegurar una resolución espacial adecuada. El campo generado por cada uno de estos ciclos se calcula a partir de la ley de Biot-Savart [1]. El campo homogéneo se especifica en puntos sobre la superficie de la RI. La localización exacta de estos puntos depende de los ceros del polinomio de orden equivalente al orden de compensación del campo [10]. El campo magnético generado por un conjunto de ciclos de corriente puede expresarse de forma matricial como: (2) B = G ⋅I invirtiendo se obtiene I = G+ ⋅B (3) donde en B se encuentra el campo magnético producido en el punto target m, en Gmn es el campo por unidad de corriente producido en el punto m por la bobina k y el vector I es la corriente en cada ciclo. La matriz G es pobremente condicionada debido a que el campo producido por los ciclos adyacentes es muy similar. La solución a este problema fue propuesta por Hoult aplicando una seudoinversión para obtener configuraciones con mínima potencia disipada [9]. Una vez determinada la corriente de cada ciclo, se obtiene a través del número de oscilaciones de I, el número de bobinas necesarias para el sistema [11]. Luego se determina la posición de los ciclos asumiendo una corriente constante. En el segundo paso se procede a formar los bloques constituidos por conductores de corriente con dimensión axial y radial finita. Debido a la discretización de la corriente obtenida y la conversión del caso ideal (ciclo de corriente) a la formación de los bloques, es preciso un proceso de reajuste de los parámetros de campo, eléctricos y mecánicos. El proceso de reajuste consiste en buscar las dimensiones y posiciones reales del sistema de bobinas determinado en el paso anterior de manera tal que los parámetros generados por el nuevo imán sean, al menos, similares a los del caso ideal determinados. Este proceso es necesario realizarlo hasta tres veces durante el proceso de diseño para obtener un imán con un número de vueltas axiales y radiales enteros [12]. donde x son las variables libres del sistema. En este trabajo se asumen las dimensiones axiales y radiales y las posiciones axiales y radiales de cada bobina como parámetro libre. En F se encuentran los distintos objetivos a optimizar. En este trabajo f1=(Co-Co target), expresa la generación de una intensidad de campo magnético específica f3 = de magnitud Co target; f2 = C 2 ⋅b 2 , Co C 4 ⋅b 4 C 6 ⋅b 6 , f4 = La minización de la amplitud Co Co de los armónicos zonales del orden dos hasta el seis, significa que la homogeneidad que se desea es la de octavo orden de compensación, como se definió en el paso de inversión, b es el radio de la RI. f 5 = 1η , se define a η como la eficiencia del sistema, la cual está dada como la razón entre η = Bo W , donde Bo es el campo constante generado por el imán y W es la potencia resistiva liberada por el sistema. f 6 = Hpp es la homogeneidad pico a pico calculada en los puntos target definidos sobre la superficie de la RI. Hpp se define como: ∆B z ∆B z (5) ) − min ( ) Bo Bo ∆B z B ( r , z ) − Bo donde , es la homogeneidad = z Bo Bo Hpp = max ( relativa al centro del imán calculada en la superficie de la RI. Para el estudio de la función objetivos se incluye el armónico correspondiente al orden de compensación, en este caso f 7 = C 8 ⋅b 8 . Co Algunos de los objetivos a minimizar están a diferentes escalas y para llegar a un compromiso óptimo entre todos hay que tratarlos de optimizar con la misma importancia. El concepto de conjunto fuzzy fue introducido por Zadeh [13] donde un planteamiento puede ser, simultáneamente, parcialmente verdadero o falso. En un conjunto fuzzy una Función de Pertenencia (FP) µ reporta el grado de veracidad de cada planteamiento, desde un rango µ=0, que indica planteamiento falso, hasta µ=1, que indica planteamiento verdadero. En lógica fuzzy los valores intermedios de µ son tomados en cuenta e indican el cumplimiento parcial del planteamiento. Si asociamos una FP µ ( f) a cada objetivo f permitirá conocer el grado de satisfacción de cada objetivo normalizado a través de µ [2]. El objetivo f5, f6 y f7 no se ven los subindices fueron asociados por separado a funciones en forma de “Z”. En el caso del objetivo f5 la FP µ( f5) será máxima (µ( f5)=1) cuando la potencia liberada sea mínima y el campo Bo sea máximo. La FP µ( f1) será igual a 1 cuando el Co de la configuración C2 ⋅ a2 C4 ⋅ a4 , µ3 , µ1(C0 ), µ2 C0 C0 OF = 1− min (6) 6 8 C a 1 C a ⋅ ⋅ 6 8 µ4 , µ , µ (ppH), µ7 C0 5 η 6 C 0 De esta manera el problema de optimización vectorial es convertido en escalar y puede ser resuelto a través de un procedimiento escalar de optimización. El problema consiste en buscar la configuración que produce el menor valor de OF. B. Algoritmo estocástico evolución diferencial Los algoritmos estocásticos han cobrado un importante auge en la última década. Las nuevas soluciones presentadas en la literatura [7] se debe a que estos procedimientos han explorado regiones de posibles soluciones ignoradas por los algoritmos deterministas. Los paradigmas de búsquedas del mínimo global de estos algoritmos se basan en simular procesos naturales relacionados con la evolución de las especies o un proceso termodinámico como el temple de metales [14]. La desventaja de estos algoritmos radica en el alto número de evaluaciones de la FO que necesitan para arribar al óptimo. Otra posible desventaja es que estos procedimientos necesitan una sintonización previa con el problema que se enfrenta, y es necesario el conocimiento al detalle de la filosofía de trabajo del método. En este artículo se seleccionó el algoritmo Evolución Diferencial (ED), creado por Storm y Price en 1996 [15]. Este algoritmo, de pocos parámetros y fácil de sintonización, consiste en generar un nuevo vector de parámetros por la adición de la diferencia sopesada de dos vectores de poblaciones a un tercer vector. Si el vector resultante produce un valor de FO más bajo que el producido por miembro de la población predeterminado, el nuevo vector generado reemplaza al vector con el cual fue comparado; en caso contrario el vector viejo es mantenido. Tres parámetros son fundamentales para controlar el método: probabilidad de cruzamiento (CR), ancho de paso (F) y el tamaño de la población (S). En este trabajo se asumió F=0.8, CR=0.9 y S=10*NV, donde NV es el número de variables libres. Los procedimientos y los cálculos fueron implementados en MatLab 5.3 en una PC Dual-Pentium a 233 MHz. 3. RESULTADOS Se aplicó la metodología con el fin de obtener un imán resistivo de bajo campo (0.1 Tesla) para RMI con una homogeneidad pico a pico en la RI menor de 80 ppm en una esfera centrada en el origen de 0.4 m de diámetro. El mínimo acceso libre a la RI fue fijado a 0.8 m. Como restricción se tiene que las dimensiones del alambre están predefinidas (0.025 m x 0.0013 m) y la fuente de corriente genera 150 A a 150 V, por lo tanto la resistencia total del electroimán, para el régimen de trabajo, tiene que ser menor o igual a 1 ohm. Para asegurar el acceso libre a la RI se extendió sobre un cilindro de radio a=0.45 m 100 ciclos de corrientes simétricas igualmente espaciados desde –0.65 m hasta 0.65 m. Los puntos targets, fueron situados en los ceros de la función de Legendre de octavo orden y mapeados en un semicírculo de radio b=0.2 m en el plano z-r. La figura 3, muestra la distribución de corriente necesaria para generar un campo homogéneo de 0.1 Tesla. Como se muestra en la figura, la solución de la corriente tiene cuatro oscilaciones que corresponde al número de bobinas a seleccionar. A una corriente constante las posiciones de estos ciclos son z1=±0.1801 m y z1=±0.5278 m. Estas posiciones y la corriente correspondiente son utilizadas para formar los enrollados de dimensión axial y radial finita. Una cuestión importante en el proceso de diseño de un dispositivo magnético es la correcta selección de la FO, pues en cierto grado determina la calidad de la configuración final. Para realizar la selección óptima de la FO y estudiar la competencia y relación entre los objetivos fueron seleccionadas varias combinaciones de los objetivos de F. En la tabla I aparecen los resultados correspondientes a cada FO. 1400 1200 1000 Corriente en proceso de diseño sea igual a Co target. La FP µ( f6) será máxima cuando la magnitud Hpp sea igual a cero. El procedimiento genera un valor fuzzy global de la función objetivo FO dado por: 800 600 400 200 0 -0.6 -0.4 -0.2 0 0.2 Posición Axial Z/m 0.4 0.6 Fig.3. En línea continua se muestra la corriente necesitada en 100 bobinas de radio 0.45 m para generar un campo magnético homogéneo en una esfera de radio 0.2 m centrada en el origen. Con marcas X se muestran las posiciones iniciales de las bobinas para obtener el imán real. Tabla I Resultados de las FO correspondiente a cada diseño FOn Co C2 C4 C6 C8 ppm Hpp η mT/m FO1 FO2 FO3 FO4 FO5 FO6 ppm ppm ppm 0.705 3.80 11.8 0.701 3.70 9.2 0.700 6.70 1.0 0.701 30.3 3.2 0.702 26.4 1.5 0.712 -0.30 0.3 39.7 33.2 33.2 0.20 0.10 0.00 -101.3 -80.3 -82.1 -71.3 -59.1 -58.2 ppm mT/A· Ω-1/2 60.1 61.8 67.9 83.9 71.3 70.0 0.715 0.714 0.714 0.714 0.714 0.718 Los objetivos que están sombreados fueron incluidos en la FO. Ejemplo: C ⋅ a8 OF1 = 1 − minµ1 (C0 ), µ6 (ppH), µ7 8 C0 Para analizar la estabilidad a errores de construcción de cada una de las soluciones presentadas en la Tabla I, se sometió cada configuración a 500 errores estocásticos sobre cada grado de libertad. El rango de variación de cada error está en el orden de la tolerancia de las máquinas de construcción del imán, este se asumió de ±1 mm. El parámetro a medir fue la homogeneidad pico a pico. En la tabla II se presenta el error medio de la Hpp perturbada respecto a la generada sin perturbación. Tabla II Error medio de cada configuración perturbada en ppm. FO1 FO2 FO3 FO4 FO5 FO6 FOn Error 1.686 1.669 1.662 1.451 2.444 1.010 muy sensible a las variaciones de las variables libres, esto se evidencia en la FO5. La configuración más estable es la determinada por la FO6. Del análisis de las configuraciones obtenidas con las distintas FO se concluye que la óptima para diseñar nuestro sistema es la FO6. En la figura 4, se muestra un esquema del imán obtenido con la FO6, es de notar la similitud entre las posiciones iniciales obtenidas y las posiciones finales del diseño. 5. CONCLUSIONES 4. DISCUSIÓN 1. El comportamiento mostrado en la figura 3 de la corriente está ausente de oscilaciones bruscas y de cambios de signos. Esto se debe a que la longitud del imán se escogió 3 veces mayor que el diámetro de la RI, además el campo homogéneo fue especificado según los ceros del polinomio que definen el orden de compensación que en nuestro caso es el octavo. La tabla I, muestra la influencia de cada uno de los armónicos en la homogeneidad total del sistema evidenciándose una notable contribución del coeficiente de orden ocho. Esto demuestra el orden de compensación del campo generado por el imán. r/m W1 2. 3. 4. REFERENCIAS W2 [1] 0.652 H2 H1 0.400 Ri1 [2] Ri2 [3] RI [4] 0.175 0.567 El método de inversión disminuye la influencia de la experiencia del diseñador en la selección de los valores iniciales de las variables libres facilitando la selección correcta del mínimo global. La introducción del objetivo Hpp compite con la minimización de los armónicos. Es recomendable disminuir la homogeneidad pico-pico a través de la minimización del armónico C8. La FO más conveniente para el diseño es la FO6, pues es donde ha sido disminuida la competencia entre los objetivos. La ausencia del parámetro Hpp en esta función permite generar una configuración estable. Se obtuvo un imán compacto que genera 0.1 Tesla y produce una homogeneidad de 70 ppm en 40 dvs, evidenciando la validez de la metodología propuesta. 0.655 z/m Fig.4. Un cuarto de la sección transversal del electroimán diseñado con la FO6. De forma esquemática se representa el paciente dentro del imán. Se muestran los grados de libertad considerados en este trabajo. La inclusión del objetivo Hpp genera configuraciones con armónicos compensados, como se observa en la FO1 de la tabla I. La compensación no implica minimización del armónico. Desde FO1 (60.1 ppm) hasta FO4 (83.9 ppm) el objetivo Hpp aumenta debido a que la posibilidad de compensar armónicos disminuye a medida que se incorporan como objetivos a minimizar. En el caso de FO5 su disminución (71.3 ppm) se debe a que se ha incluido además del Hpp la amplitud del C8 que en nuestro caso determina la amplitud de la homogeneidad pico-pico. En esta FO se produce una fuerte competencia al minimizar la amplitud de los armónicos y al incluir el objetivo Hpp, esto influye de manera negativa en velocidad de convergencia del algoritmo. La eficiencia obtenida en los diferentes diseños es my similar sugiriendo una cota máxima impuesta por los requerimientos del sistema. El uso de la homogeneidad como objetivo conspira contra la estabilidad del sistema al provocar este objetivo una combinación entre los diferentes valores de los coeficientes [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] H. Saint-Jalmes & J. Taquin , “Optimization of homogeneous electromagnetic coil systems: Application to whole-body NMR imaging Magnets”, Rev. Sci. Instrum., Vol. 52, no.10, pp.15011508, 1981. M. Chiampi, C. Ragusa and M. Repetto, ”Fuzzy Approach for Multiobjective Optimization in Magnetics,” IEEE Trasn. Magn, vol 32, pp 1234-1237, 1996. M. W. Garrett, “Thick cylindrical coil systems for strong magnetic fields with field or gradient homogeneities of the 6th to 20th order,” J. Appl. Phys., vol. 38, no. 6, pp. 2563-2586, May 1967. Lugansky L.,”On optimal synthesis of magnetic fields,” Meas Sci. Technol, no.1, pp. 53-58, 1990. R. Turner, “A target field approach to optimal coil design,” J. Phys. D.,vol. 19, no. 8, pp. 147-151, 1986. S. Pissanetzky, “Structured coils for NMR applications,” IEEE Trans. Magn., vol. 28, pp.1961-1968, 1992. S. Crozier and D. M Doddrell, “Compact MRI Magnet Design by Stochastic Optimization,” J. Magn. Reson, vol 127, pp. 233-237, 1997 H.Sánchez, “Diseño Mejorado de Bobinas de Gradientes Transversales para las Máquinas de Imágenes por RM Giroimag ” Rev, Mex. Física.,vol. 44, 470-472, 1998. D. I. Hoult & R. Deslauriers, “Accurated shim-coil design and magnetic field profiling by a power-minimization-matrix method,” J. Mag. Reson.,vol. 108, no. 1, pp. 9-20, 1994. P. N. Morgan, S. Conolly, & A. Macovski, “Resistive homogeneous MRI magnet design by matrix subset selection,” Magn. Reson. Med., vol. 41, no.6, pp. 1221-1229, 1999. H. Zhao, S. Crozier, & D. Dodrell, “Asymmetric MRI Magnet design using a hybrid numerical method,” J. Mag. Reson.,vol. 141, pp. 340-346, 1999. H. Sanchez & C Garrido “Multiobjective resistive magnet optimization using the differential evolution algorithm”, digest, 6th International workshop on OIPE, pp. 71, 2000. Zadeh. L. A, “Fuzzy sets,” Information and Control, vol. 8, pp. 338-353, 1965 P.G. Alotto et all, “Stochastic algorithms in Electromagnetics optimization,” IEEE Trans. Magn., vol. 34, pp.3674-3684, 1998. R. Storn and K Price, “Minimizing the Real Functions of the ICEC 96 Contest by Differential Evolution”, Proceeding of The International Conference on Evolutionary Computation, Nagoya, Japon , 1996. METHODOLOGY FOR DESIGNING A RESISTIVE MAGNET FOR MAGNETIC RESONANCE IMAGING ABSTRACT A methodology for designing a resistive magnet for Magnetic Resonance Imaging machine is described. From the current inversion, associating a membership function to each parameter and applying a stochastic optimization algorithm, we obtain the geometrical dimension and position of four coils in order to produce uniform magnetic field. We study the competition among parameters and we select the optimum objective function for magnet design. Are analyzed the stability of the solutions. The obtained magnet produce a magnetic field of 0.1 Tesla and generate a homogeneity of 70 ppm in 40 dvs. The methodology is useful to obtain an efficient and compact magnet. Details of the procedure and the discussion of the results are presented in the work.