Tutorial Ardubot
Anuncio

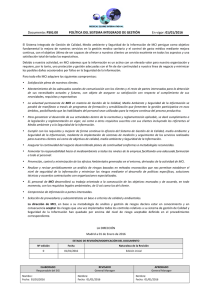
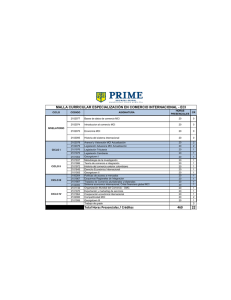
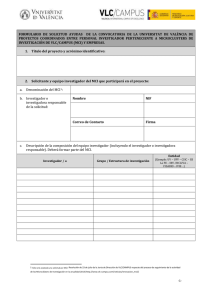
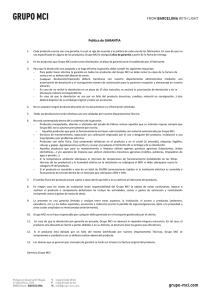
Tutorial Ardubot Este tutorial intenta mostrar al lector como construir una plataforma Ardubot. Hay varias maneras de hacer esto y en general depende mucho de la creatividad de cada uno, por lo que seremos un poco generales y mostraremos un par de ejemplos prácticos. En primer lugar, tenemos que reunir todas las partes: Figura 1: La mayor parte de las partes de la Ardubot. Figura 2: Unas pocas piezas faltantes Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 2 | T u t o r i a l A r d u b o t La lista es la siguiente: • (1) MCI‐RBT‐00545, PCB Ardubot • (1) MCI‐TDD‐00273, Placa USB Arduino • (1) MCI‐RBT‐00547, Ruedas 32 x 7 mm • (1) MCI‐RBT‐00546, Ruedecilla de bola de metal 3/8’’ • (2) MCI‐RBT‐00546, micro motor metálico 30:1 • (1) MCI‐RBT‐00212, controlador de motor puente‐H • (1) MCI‐COM‐00555, Interruptor de encendido mini SPDT • (2) MCI‐PRT‐00177, Conector pin headers También puedes usar el conector de batería polarizado que vendemos (sku: MCI‐PRT‐ 00316). Además podrías haber sustituido la placa Arduino Pro tamaño estándar 5v (sku: DEV‐ 08943) por la versión USB, haciéndolo ligeramente más barato y más pequeño. Y podríamos haber utilizado motores 100:1 (sku: ROB‐08910) en vez de 30:1, haciéndolo más lento. Estas son sólo opciones, por supuesto hay que enmarcarse en el presupuesto. Una vez que tenemos todos los materiales tenemos que soldar el puente H de la siguiente forma: Figura 3: El puente H soldado al Ardubot Luego, debemos instalar los motores con sus monturas. El kit de montaje (MCI‐RBT‐ 00554) viene con 2 monturas y sus respectivos tornillos y tuercas. Las monturas se encajan sobre Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 3 | T u t o r i a l A r d u b o t la caja de cambios del motor. Sólo inserta las tuercas en los orificios de las monturas y aprieta el perno desde el otro lado de la placa. Figura 4: El aspecto que tienen los motores una vez que se han montado en la placa. El siguiente paso son las ruedas. Tendrás que poner la goma en las llantas tú mismo, si quieres que las cosas funcionen bien tienes que hacerlas tu mismo. Ahh hemos visto que alguna de las llantas tienes algunas lengüeteas plásticas que podrías querer recortar, para un mejor ajuste. Las ruedas se deben sólo presionar en el eje del motor. Figura 5: Hasta este punto, parece más un auto, pero ¡ya lo terminaremos! Luego instalaremos la rueda pivote. La rueda viene con un par de espaciadores, tornillos y tuercas para el montaje. Apenarlo todo en el orden que prefieras. Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 4 | T u t o r i a l A r d u b o t Figura 6: La ruedecilla apernada a la placa. Ahora es un buen momento para soldar los motores a la placa. Yo usé un par de conectores machos para encajar y soldar (SKU: MCI‐PRT‐00177). Figura 7: Con unos pocos ajustes, estos conectores se ajustarán perfectamente Luego, instalamos la placa Arduino. Para esta construcción, escogí la versión USB (también conocido como Arduino Duemilanove). Hay diferentes métodos para hacer este trabajo, esta pequeña guía muestra la forma que yo utilicé. Hay dos problemas menores que he encontrado con esta configuración, los cuales los iré direccionando a medida que avancemos. Primero, corta los conectores machos que necesitarás para montar la placa (SKU: MCI‐ PRT‐00177). Necesitarás 2 de 1x8 y 2 de 1x6. Cuando los tengas cortados instálalos dentro de los conectores hembras en el Arduino. El Arduino está dado vuelta hacia arriba en la placa Ardubot. El primer problema con esta configuración es que el conector para programar le pega a uno de los Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 5 | T u t o r i a l A r d u b o t tornillos de montaje de uno de los motores. Para arreglarlo, corta alrededor de 1.5mm (o menos) de los seis pines que componen el conector. Figura 8: El Arduino “posando” con el Ardubot. Luego, instala el Arduino en la PCB Ardubot…..y deberías estar viendo el problema número 2 ahora mismo. El conector USB interfiere con una de las ruedas. La manera de arreglarlo es ajustar la rueda un poquito hacia afuera. Esto podría poner nerviosos a algunas personas, pero este robot es poco probable que lleve mucho peso como para causar una falla por esto. Aunque me gustaría animar a alguien a tratar, podría ser divertido. En cualquier caso, puedes hacer el ajuste de la rueda a tu gusto, para luego soldar los conectores en la placa Ardubot. Figura 9: El Ardubot luciendo bien. Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 6 | T u t o r i a l A r d u b o t Figura 10: Si ya estás en este punto puedes darlo vuelta y admirar tu obra Figura 11: Este robot depende de tí. Comentario adicional: Olvidé mencionar como manejar los motores con el Arduino. Para controlar el puente H se hace con líneas digitales 3, 5, 6 y 9 en el Arduino. Las líneas 9 y 6 controlan el lado izquierdo del motor, las líneas 5 y 3 controlan el lado derecho del motor. ¿Y ahora que? ¡El robot no HACE nada! Bien, este es el punto en donde avanzas y juegas al ingeniero. ¿Qué quieres que haga? Seguramente, no lo construiste sólo para ponerlo en una repisa y que se vea bonito. Entonces, como un ejemplo, esto es lo que yo hice. Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 7 | T u t o r i a l A r d u b o t El Molestoso Bien, quizás no es molestoso, pero obtuve unos pocos gestos cuando algunos compañeros de trabajo vieron esta cosa rodando en sus oficinas y mirándolos. Figura 12: ¿Qué estas mirando? Lo que estás viendo es un Ardubot que usa un BlueSMiRF (MCI‐WIR‐00121) para controlarlo, y tiene un trasmisor de video de 2.4 GHz. La idea es ir explorando desde mi escritorio. Esto tiene unos faros (un par de Led’s blancos al frente), y también un LED intermitente azul y amarillo pegado arriba en el medio que parpadea con la esperanza que en que llame la atención de la gente que accidentalmente pudiese pisarlo. La cámara está montada en un motor servo que sube y baja. También tiene un micrófono. Todas las cosas son encendidas por 2 baterías de Polímero de Litio (LiPo) de 2 celdas @ 1100mAH que puse juntas. Y mientras estoy pensando en esto…..el conector de batería del PCB Ardubot se ha establecido como uno de nuestros conectores de batería, pero de alguna manera no he tenido la previsión de poner algún tipo de indicador de polaridad en él. Habrá que arreglar esto en la serigrafía para la siguiente versión de la placa, pero por el momento aquí hay una imagen que muestra la polaridad: Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 8 | T u t o r i a l A r d u b o t Figura 13: No es la mejor serigrafía, pero sirve La tarjeta posee una pista para una batería externa Vbat, 5VDC y tierra, por lo que alimentar cualquier otro dispositivo extra es bastante sencillo. La pista 5v viene desde regulador del Arduino, si estás considerando agregar más hardware necesitarás más corriente. Siempre puedes agregar otra 7805 u otro regulador de 5v. La pista Vbat corre desde el interruptor principal. Este fue mi prototipo original, y lo hice un poco diferente que los otros. En el primer ejemplo construí todo con la PCB con la serigrafía hacia abajo, y con este estoy haciéndolo con la serigrafía hacia arriba. La principal razón es que yo quería hacerlo así, entonces podría tener el Arduino hacia arriba en vez de hacia abajo. Como beneficio adicional, el conector USB y el conector programador se pueden montar sin mayor cuidado. Instalar el Arduino de esta forma no es complejo, pero describiré como lo hice de todas formas. Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 9 | T u t o r i a l A r d u b o t Figura 14: El Arduino en toda su gloria En realidad es bastante simple. Primero, corta 2 conectores 1x8 y 1x6 machos y hembras. Pon los conectores hembras en la PCB Ardubot, soldando un pin de cada uno para que se sujeten, pero tengan un poco de movilidad. Luego suelda un pin de cada conector macho (lado corto). Posiciona el conector de modo que llegue hasta el fondo de su correspondiente conector hembra en el Arduino. Esto debería ser obvio, pero en caso de que no lo fuera, todos los pines del conector macho necesitan ser soldados de modo que la placa quede alineada hacia arriba. Como se dijo anteriormente, la cámara es uno de los nuevos productos de nuestro catálogo, lo hemos sacado de su caja y montado en un motor servo. El motor servo es alimentado desde una línea de 5V, la cámara es alimentada desde VBat. El control lo hago por el hyperterminal. Puedo ir adelante, atrás, izquierda, derecha, hacia arriba y hacia abajo con el teclado. Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589 10 | T u t o r i a l A r d u b o t Figura 15: Sólo una pequeña foto del tren de aterrizaje Rendimiento Honestamente, más o menos. Es decir, se maneja fácilmente, pero desearía que hubiera más tiempo para trabajarlo. El gran problema es el corto rango del video. Yo realmente puedo capturar sólo unas pocas oficinas más allá antes de que empiece a verse realmente mal. Me gustaría una red wi‐fi con una webcam, entonces la gente conectada podría manejarlo alrededor y salir a explorar. Pero por ahora, es un lindo juguete. Además de las deficiencias del video, la plataforma es simple y robusta, con un montón de espacio para agregar en ella. Espero que les haya servido como una idea para crear su propio robot! Nota: Este documento ha sido traducido por Jennifer Thompson S. y revisado por Paul Aguayo S. Corresponde a la traducción del documento original “Build a Robot” de Sparkfun. Ingeniería MCI Ltda. – Luis Thayer Ojeda 0115 of 402, Providencia, Santiago, Chile Fono: + 56 2 3339579 Fax: +56 2 3350589