CONTROL VECTORIAL DE UN MOTOR SÍNCRONO PARA UN
Anuncio

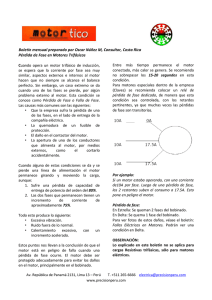
European Technological Center Departament d’Enginyeria Electrònica, Elèctrica i Automàtica Proyecto final de carrera: CONTROL VECTORIAL DE UN MOTOR SÍNCRONO PARA UN AUTOMÓVIL CON TECNOLOGÍA HÍBRIDA Titulación: Enginyeria en Automàtica i Electrònica Industrial Autor: Tutor URV: Tutor LEAR: Fecha: Antonio Fornos Navarro Dr. Javier Maixé Altés Dr. Ignacio Álvarez Troncoso Junio 2006 El trabajo que se presenta en el siguiente proyecto final de carrera se ha realizado mediante la segunda edición del “Premi LEAR a la innovació tecnològica” durante el curso académico 2005/06 convocado por la Fundació Ciutat de Valls y la empresa Lear Corporation, siendo premiado con un accésit de 1000 euros. El trabajo se ha desarrollado en el European Technological Center (ETC) de LEAR en Valls con el apoyo y supervisión de un tutor por parte de la empresa, el Dr. Ignacio Álvarez, y un tutor por parte de la Universidad Rovira i Virgili, el Dr. Javier Maixé, que forma parte del departamento de Enginyeria Electrònica, Elèctrica i Automàtica. Debido a que este proyecto contiene información confidencial, según la normativa de proyectes fi de carrera (ETI-E, ETI-EI, EAEI) (aprovat en Junta de Centre el 30 de maig del 2003) se han tendido que redactar dos tipos de documentos. A continuación, se muestra la versión reducida que se presentará en la biblioteca de la universidad la cual consta de una introducción en la que se presenta el contenido del documento original. También se añade un anexo en el que se recoge íntegramente el índice del documento original. El documento original es propiedad de Lear Corporation y la dirección de contacto es la siguiente: Lear Automotive (EEDS) Spain S.L. C/Fusters nº 54-56 C.P. 43800 Valls (Tarragona) Tlf. 977617100 Capítulo 1 Introducción Capitulo 1: Introducción 1.1 Descripción general del proyecto Debido a la mayor conciencia social medioambiental, el empleo de energías alternativas para la tracción de vehículos ha experimentado un fuerte impulso en los últimos años. Siguiendo esta misma línea, son ya numerosos los fabricantes que cuentan con uno o varios modelos de vehículos híbridos en el mercado. Estos vehículos híbridos combinan un motor convencional de combustión interna con una máquina eléctrica. Esta tecnología se ha adoptado debido a los problemas de peso, económico, de rendimiento e infraestructura (puntos de recarga) que supone, por el momento, el vehículo exclusivamente eléctrico. El eje principal de este estudio, es determinar o establecer un tipo de motor junto con una estrategia de control que se adapte a las necesidades y requerimientos del motor eléctrico del vehículo híbrido. En los últimos años, se han considerado a las máquinas de alterna más eficientes que las de continua para los vehículos híbridos y también para los eléctricos de media y gran potencia. Dentro de los motores AC, los que reúnen unas mayores prestaciones en cuanto a robustez son los motores síncronos como los de imanes permanentes, los de rotor bobinado o los de reluctancia conmutada. Por este motivo, en el presente estudio se tratará la máquina síncrona de rotor bobinado de polos salientes y excitación rotórica DC (WRSM) y la máquina síncrona de imanes permanentes (PMSM). Esta última, a grandes rasgos, puede considerarse un caso particular de la primera. Esto es debido a que los modelos que definen ambas máquinas son similares. La principal diferencia es que en la primera, el campo magnético en el rotor de la máquina se crea gracias a la corriente de excitación DC, y por tanto, es variable. En el caso de la PMSM, el campo creado es constante ya que esta determinado por los imanes montados en el rotor y viene fijado por construcción. La estrategia de control implementada para ambas máquinas será el control vectorial o control orientado a campo, o en inglés, field oriented control (FOC) mediante una primera etapa en la que los modelos se implementarán sobre Matlab/Simulink para que posteriormente, en una segunda fase se implemente en una DSP de la familia TMS320C28x™ de Texas Instruments. Esta DSP va montada sobre una placa que forma parte de un kit de desarrollo suministrado por Spectrum Digital que incluye también el software Code Componer Studio. Éste es un kit diseñado para el control de motores y con numerosos bloques encaminados a la implementación del control vectorial así como la generación de pulsos PWM. La utilización del control vectorial permite extrapolar la técnica de control de motores de corriente continua al ámbito de los motores de alterna, pudiendo desacoplar el modelo matemático de la máquina y controlar las componentes responsables de flujo magnético y del par motriz de forma independiente. De esta forma, controlando la componente responsable del par se podrá realizar un lazo de control sobre la velocidad o el par de la máquina. En el caso de la máquina WRSM, hay un parámetro de control adicional, con respecto al de imanes permanentes, que es la corriente de excitación del rotor. -1- Control vectorial de un motor síncrono para un automóvil con tecnología híbrida 1.2 Objetivos del proyecto En este trabajo se pretende realizar un estudio comparativo entre dos posibles soluciones para la implementación del control vectorial sobre los motores síncronos en los vehículos con tecnología híbrida. Como se ha comentado anteriormente, las dos posibles soluciones son el motor de imanes permanentes y el de rotor bobinado. De forma más concreta, los objetivos de este proyecto son los siguientes: • Implementar el control vectorial sobre la máquina síncrona de imanes permanentes (PMSM) mediante Matlab/Simulink. • Implementar el control vectorial sobre la máquina síncrona de rotor bobinado (WRSM) mediante Matlab/Simulink. • Controlar consignas de velocidad y par para ambas máquinas. • Realizar un análisis técnico-económico de ambos sistemas: benchmarking. • Llevar a cabo una primera toma de contacto con el DSP TMS320F28xx y el entorno de trabajo Code Composer Studio (CCStudio) y marcar unas pautas para la implementación del control. 1.3 Marco actual en el sector del automóvil: vehículo híbrido Los vehículos eléctricos ya son familiares al público, pero su precio, corta autonomía y bajas prestaciones han limitado siempre su aceptación. Por otro lado, los motores de combustión interna se han utilizado durante más de un siglo, pero la creciente demanda de vehículos con un menor consumo y menos contaminantes preparan el terreno a un nuevo enfoque y desarrollos futuros. La combinación inteligente de estas dos fuentes de potencia en un sistema híbrido tecnológicamente avanzado, puede conseguir unos ahorros de combustible notables y un considerable recorte en la emisión de gases con la autonomía y las prestaciones de un vehículo convencional. Actualmente, los sistemas híbridos serán el enlace entre los vehículos híbridos de gasolina de hoy y los vehículos con células de combustible del mañana. El la figura 1.1, se presenta una gráfica de las ventas de diferentes modelos de vehículos híbrido durante los años 2004-2005 en Estados Unidos, donde se puede apreciar el creciente interés de los usuarios en adquirir un vehículo con esta nueva tecnología. Figura 1.1 Ventas de vehículos híbridos en US en 2004-2005. -2- Capítulo 1 Introducción Hoy en día, la referencia dentro del sector del automóvil en cuanto a tecnología híbrida es el Toyota Prius. El Prius fue el primer vehículo con tecnología híbrida que se comercializó en el año 1997, de aquí el nombre de Prius, que en latín significa “adelantado a su tiempo”. Desde la aparición de este primer modelo, Toyota ha ido evolucionando y mejorando esta tecnología dando lugar al nuevo sistema híbrido de segunda generación del Prius. Éste es el primer sistema en desarrollarse según un concepto revolucionario denominado ‘Hybrid Synergy Drive’. Este principio se basa en una sinergia homogénea entre las inquietudes y la sensibilidad medioambientales, que se pueden traducir en prestaciones u otras áreas atractivas al cliente. La generación actual de sistemas híbridos depende del motor de gasolina para generar las máximas prestaciones, llevando el motor eléctrico de forma auxiliar. El concepto ‘Hybrid Synergy Drive’ confiere al motor eléctrico un papel más importante en el suministro de potencia al vehículo tanto para alcanzar un menor consumo como para obtener el máximo de prestaciones, intensificando la sinergia entre la potencia eléctrica y de gasolina. Dado que el motor eléctrico tiene bastante más rendimiento que el de gasolina, esto también se traducirá en un menor consumo, atendiendo también a la mejora de las prestaciones. La distinción de una conducción dinámica no se trasladará únicamente a las cifras de prestaciones básicas, sino que también lo hará a otras áreas como el funcionamiento suave y silencioso y la aceleración lineal, capítulos en los que los motores de combustión interna tendrán muchas dificultades para mantenerse al mismo nivel de esta nueva generación de sistemas híbridos. Cuando el motor de combustión experimente un rendimiento pobre, el vehículo funcionará únicamente con la potencia generada por el motor eléctrico. Bajo condiciones normales, el motor de alto rendimiento funciona como la fuente principal de potencia y el dispositivo divisor de potencia distribuye la potencia del motor de combustión entre la generación de electricidad y la transmisión del vehículo. El sistema selecciona el dominio del motor de combustión eficiente para impulsar el vehículo y controla continuamente la relación eficiente de generación de energía eléctrica y la distribución de potencia de transmisión. El nuevo Toyota Prius cumple cómodamente con las normas de emisión de gases EURO IV, así como con la japonesa I-ULEV y la norteamericana AT-PZEV (con transmisión automática), siendo el Prius el primer vehículo del mundo en cumplir al mismo tiempo con estas estrictas normas sobre emisión de gases. Los vehículos híbridos que siguen la filosofía ‘Hybrid Synergy Drive’ son los primeros en el mundo en basarse en un paquete de seguridad activa completamente eléctrica y electrónica, incluyendo la servodirección eléctrica y el primer sistema de frenado por cable del mundo con un sistema completamente eléctrico. El ABS, EBD y VSC también van incorporados en él y funcionan con un circuito totalmente eléctrico/electrónico. Un cerebro electrónico central coordina estos sistemas para crear una sinergia perfecta entre ellos. Esto permite que todos los sistemas de seguridad activa, incluida la dirección eléctrica, puedan actuar como uno solo cuando se produzca una situación peligrosa. Esto sólo es posible usando un sistema VSC de 2ª generación que, por primera vez, incorpora el control del sistema de servodirección eléctrica. La adopción de un sistema de frenado completamente eléctrico (una evolución del sistema ECB original del Estima Hybrid) también mejora el rendimiento global del sistema híbrido, permitiendo una recuperación de energía superior gracias al frenado -3- Control vectorial de un motor síncrono para un automóvil con tecnología híbrida regenerativo. Aunque la 1ª generación del Prius ya dispone de un sistema de frenado regenerativo, la nueva aplicación por cable permite una mayor recuperación de energía. Figura 1.2 Panel de control sobre el tablero frontal del Toyota Prius 2ª generación. En resumen, se pueden destacar las siguientes ventajas del vehículo híbrido sobre el vehículo tradicional: • Son capaces de conseguir una eficiencia doble, lo que se consigue por la supresión de la mayor parte de las pérdidas de potencia que se producen en los vehículos tradicionales. Esto es debido a que la máxima eficiencia de un motor se obtiene en unas determinadas condiciones de funcionamiento, con una carga y una velocidad de giro fijas. Cuando una de éstas o las dos varía, este rendimiento baja sensiblemente. Como quiera que en un recorrido convencional las condiciones de velocidad y carga de un vehículo deben variar necesariamente, es necesario sobredimensionar ampliamente el motor, para que sea capaz de responder a estos cambios sin que disminuyan drásticamente las prestaciones. • El motor se dimensiona solo para una potencia promedio, ya que los picos de potencia los proporciona la fuente de energía alternativa. Esto, además, permite que el motor funcione siempre en su punto óptimo o muy cerca de él. Por ello su eficiencia resulta doblada, pudiéndose aligerar el peso y volumen hasta en un 90%. • El sistema de frenado tiene a su vez capacidad regenerativa de la potencia absorbida, lo que reduce las perdidas de eficiencia. • El motor puede desactivarse durante la marcha cuando no se necesita • La eficiencia en el consumo de combustible se incrementa notablemente, lo que se traduce en reducción de las emisiones. En cuanto a las ventajas que presenta la tecnología híbrida frente al vehículo exclusivamente eléctrico, se pueden destacar las siguientes: • Incremento de autonomía, ya que esta depende del combustible almacenado en el tanque. • Alto y uniforme rendimiento incluso a bajas temperaturas. • La unidad auxiliar no funciona automáticamente cuando no es necesaria. continuamente, ya que se • Se elimina la necesidad de recargar las baterías cuando estas se agotan. -4- desactiva Capítulo 1 Introducción • El motor de combustión interna funciona bajo un estrecho margen de carga y velocidad, lo que incrementa su eficiencia. • Este sistema de propulsión pesa alrededor de una cuarta parte de lo que pesa un vehículo de baterías eléctricas, que debe arrastrar media tonelada de baterías. Los vehículos híbridos ofrecen así las ventajas de la propulsión eléctrica sin las desventajas de las baterías. Para finalizar con este breve repaso sobre la tecnología híbrida, a continuación se presenta una tabla comparativa que proporciona el Departamento de Energía del gobierno de Estados Unidos, entre distintos vehículos convencionales y con tecnología híbrida. Los modelos que se muestran son el Honda Civic 2006 (versión convencional e híbrida) y el Toyota Prius. Tabla 1.1 Tabla comparativa entre vehículos convencionales y con tecnología híbrida. En la tabla 1.1 se puede apreciar el ahorro de combustible y el menor nivel de contaminación que proporcionan los modelos de vehículos híbridos. Si comparamos las dos versiones del Honda Civic, podemos ver que el consumo combinado del híbrido supone un ahorro de unos dos litros de combustible a los 100 Km. Esto supone una mayor eficiencia y autonomía del vehículo, ya que a pesar de tener un tanque de combustible de menor capacidad, el modelo híbrido posee una autonomía de 240 Km. más que su homólogo convencional. En cuanto a las emisiones de ambos vehículos, los datos revelan una reducción de prácticamente dos toneladas en el vehículo híbrido. Por otro lado, también se debe destacar el consumo del Toyota Prius, que con un consumo combinado de 4.3 l/100 Km. se puede comparar al de un pequeño utilitario. Esta reducción del consumo esta estrechamente ligado con la notable reducción de emisiones, que se sitúa en torno a tres toneladas al año, frente a las cinco del Honda Civic. -5- Control vectorial de un motor síncrono para un automóvil con tecnología híbrida Por último, se debe recalcar que estas tecnologías híbridas no suponen una reducción en las prestaciones en cuanto a motorización, seguridad o confort del vehículo. En el caso del modelo híbrido del Honda Civic, ofrece una potencia de 115 cv, 95 procedentes del motor de combustión y 20 del motor eléctrico síncrono de imanes permanentes, con una velocidad máxima de 185 Km/h. En el caso del Toyota Prius, los 78 cv de potencia del motor de combustión junto con los 68 cv del motor de imanes permanentes ofrecen una potencia total de 146 cv de potencia y una velocidad máxima de 180 Km/h. Por otro lado, ambos modelos están equipados con sistemas como ABS, ESP, ASR, etc. al igual que sus modelos homólogos convencionales. 1.4 Estado de las máquinas eléctricas en el vehículo híbrido En este apartado se realizará un repaso a las posibles máquinas eléctricas que son candidatas a formar parte del sistema en el vehículo híbrido y sus principales características. En primer lugar, si nos fijamos en las máquinas de corriente continua, se puede decir que son un tipo de motores tradicionalmente utilizados en sistemas de propulsión. En el caso de este tipo de motores con escobillas hay un problema evidente de mantenimiento, que en el sector del automóvil se trata de evitar, y también puede generar gran cantidad de ruido electromagnético a la vez que posee ciertas limitaciones en cuanto a velocidad y al incremento de peso para altas potencias. Sin embargo, hoy en día hay un gran avance en motores sin escobillas (brushless) con un aumento en robustez, eficiencia y densidad de potencia. Por otro lado, en cuanto a los motores de inducción asíncronos, al no poseer escobillas no hay ningún requerimiento respecto al mantenimiento. Éstos son motores que han adquirido una gran madurez, robustez y fiabilidad en los últimos años y que gracias al aumento de aplicaciones que se adaptan a este tipo de motores su precio ha disminuido. Sin embargo, en este tipo de motores se producen muchas pérdidas en el rotor y el “speed ratio”, es decir, la velocidad que se puede alcanzar respecto la velocidad nominal en este tipo de motores sin que se produzca una disminución en el par, es de aproximadamente 1:3, cuando los requeridos en este tipo de sistemas es de aproximadamente 1:7. Este hecho provocaría un sobredimensionamiento de la parte de electrónica asociada (inversor). También se puede tratar como posible solución los motores de reluctancia conmutada. Este tipo de motores poseen un speed ratio de 1:6 a 1:8, es robusto y de simple construcción. En contrapartida, este tipo de motores poseen un estator y una electrónica diferente de la establecida en otras máquinas. Además, la controlabilidad del sistema es bastante pobre y se produce altos niveles de ruido y vibraciones. Finalmente, se encuentran los motores que se han decidido tratar en el presente trabajo: la máquina síncrona de imanes permanentes y la de rotor bobinado. La primera, permitirá adquirir un “know how”, es decir, un conocimiento y un primer contacto con el control vectorial sobre este tipo de máquinas ya que es la más utilizada actualmente en vehículos con tecnología híbrida (alrededor 80%). Este tipo de máquinas son de menor tamaño y más baratas respecto a las de rotor bobinado aunque el sobredimensionamiento de la electrónica asociada hace que el conjunto final sea más voluminoso y caro. En el caso de la máquina de rotor bobinado, había un especial interés por parte de Lear Corporation en su estudio debido a las ventajas que puede presentar este tipo de máquinas en el control de la corriente de excitación del rotor en las zonas de pico de potencia y ya que no es una opción muy estudiada hasta el momento. -6- Anexo: Índice Anexo: Índice Capítulo 1: Introducción ................................................................................................... 1 1.1 Descripción general del proyecto......................................................................... 1 1.2 Objetivos del proyecto ......................................................................................... 2 1.3 Marco actual en el sector del automóvil: vehículo híbrido .................................. 2 1.4 Estado de las máquinas eléctricas en el vehículo híbrido .................................... 6 Capítulo 2: Descripción de las máquinas eléctricas y los modelos .................................. 7 2.1 La máquina síncrona de imanes permanentes (PMSM)....................................... 7 2.1.1 Introducción ............................................................................................... 7 2.1.2 Modelos de la PMSM ................................................................................ 8 2.1.2.1 Ecuaciones de tensiones................................................................ 8 2.1.2.2 Ecuaciones de flujos...................................................................... 8 2.1.2.3 Ecuación del par electromagnético ............................................... 9 2.1.3 Esquemático ............................................................................................... 9 2.1.3.1 Esquema para la consigna de velocidad........................................ 9 2.1.3.2 Esquema para la consigna de par ................................................ 10 2.1.4 Análisis del modelo.................................................................................. 10 2.2 La máquina síncrona de rotor bobinado (WRSM) ............................................. 12 2.2.1 Introducción ............................................................................................. 12 2.2.2 Modelos de la WRSM.............................................................................. 14 2.2.2.1 Ecuaciones de tensiones.............................................................. 14 2.2.2.2 Ecuaciones de flujos.................................................................... 14 2.2.2.3 Ecuación del par electromagnético ............................................. 14 2.2.3 Esquemático ............................................................................................. 15 2.2.3.1 Esquema para la consigna de velocidad...................................... 15 2.2.3.2 Esquema para la consigna de par ................................................ 15 2.2.4 Análisis del modelo.................................................................................. 16 Capítulo 3: Control vectorial y aplicación sobre las máquinas eléctricas....................... 19 3.1 Control vectorial................................................................................................. 19 3.1.1 Introducción ............................................................................................. 19 3.1.2 Controladores PI ...................................................................................... 19 3.1.3 Snubbers................................................................................................... 20 3.1.4 Consigna de par........................................................................................ 20 3.1.5 Consigna de velocidad ............................................................................. 35 3.2 Control vectorial sobre la PMSM....................................................................... 36 -7- Control vectorial de un motor síncrono para un automóvil con tecnología híbrida 3.2.1 Estrategia Id-Iq......................................................................................... 36 3.2.2 Picos de potencia en la zona de iso-potencia ........................................... 36 3.3 Control vectorial sobre la WRSM...................................................................... 37 3.3.1 Estrategia para Id, Iq e If.......................................................................... 37 3.3.2 Consigna de par........................................................................................ 38 3.3.3 Consigna de velocidad ............................................................................. 39 Capítulo 4: Estudio de las Dos Soluciones mediante Matlab/Simulink ......................... 41 4.1 Bloques funcionales ........................................................................................... 41 4.1.1 Motor........................................................................................................ 41 4.1.2 Puente inversor: IGBT’s .......................................................................... 42 4.1.3 Drivers...................................................................................................... 42 4.1.4 Sensores de corriente ............................................................................... 43 4.1.5 Condensadores del bus DC ...................................................................... 43 4.2 Ajustes del sistema ............................................................................................. 43 4.2.1 Ajustes del control: PI’s........................................................................... 43 4.2.2 Filtrado/eficiencia: snubber...................................................................... 44 4.3 Respuesta dinámica de la máquina de imanes permanentes .............................. 46 4.3.1 Desarrollo del par requerido .................................................................... 46 4.3.2 Rango de velocidades .............................................................................. 48 4.3.3 Respuesta a un cambio en la consigna de velocidad................................ 48 4.3.4 Respuesta a un cambio en el par resistente .............................................. 50 4.3.5 Zona iso-par e iso-potencia ...................................................................... 51 4.4 Respuesta dinámica de la máquina síncrona de rotor bobinado......................... 53 4.4.1 Rango de velocidades .............................................................................. 53 4.4.2 Respuesta a un cambio en la consigna de velocidad................................ 55 Capítulo 5: Implementación básica del control vectorial en un DSP ............................. 57 5.1 Elección del DSP................................................................................................ 57 5.2 Pasos a seguir en la implementación del software ............................................. 59 5.3 Ejemplo de implementación del control vectorial sobre la PMSM mediante el kit de desarrollo del DSP TMS320F2812 ...................................................... 60 Capítulo 6: Análisis técnico-económico ......................................................................... 71 Capítulo 7: Conclusiones ................................................................................................ 73 Capítulo 8: Trabajo futuro .............................................................................................. 75 Capítulo 9: Bibliografía .................................................................................................. 77 -8-