Máquinas en acción
Anuncio

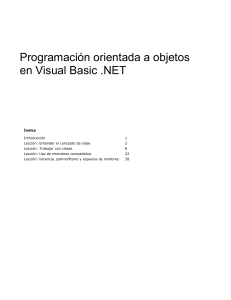
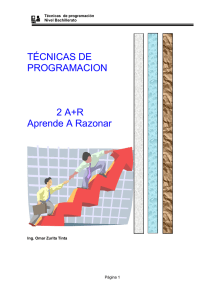
Máquinas en acción NIVELES: ROBOT QUE NO SE CAE DE UNA MESA 4.º DE LA ESO Y 1.º BACHILLERATO YO CONTROLO... PROFESORES: FRANCISCO GALLEGO CAMPOS ÁNGEL ARCADIO MENÉNDEZ FERNÁNDEZ M.ª TRINIDAD RAMÍREZ MORENO CENTRO: I. E. S. JORGE MANRIQUE JUSTIFICACIÓN Y OBJETIVOS Mostrar las actividades que realiza el departamento de Tecnología con los alumnos de 4.º de la ESO y 1.º de Bachillerato de Informática relacionadas con la robótica, tanto programable como no programable. Los alumnos de 4.º de la ESO muestran sus pequeños robots móviles, controlados por un circuito electrónico básico, que reaccionan ante estímulos de su entorno. Los de 1.º de Bachillerato muestran sus robots programados en Visual Basic. De esta manera se pretende: • Profundizar en contenidos de electrónica. • Elaborar circuitos impresos. • Tomar contacto con el mundo de la Robótica. • Introducir a la programación mediante Visual Basic. ROBOT QUE NO SE CAE DE UNA MESA Material necesario • Dos motores con reductora, tornillo sinfín, engranaje y ruedas. • Dos juegos de componentes electrónicos (ver circuito). • Chapa, tornillos y cable. Aplicación didáctica El robot tiene un motor para cada rueda motriz: uno a la derecha y otro a la izquierda. También tiene dos finales de carrera (FC), uno a cada lado, que actúan como sensores del borde de la superficie en la que se mueve el robot. Cuando uno de los sensores detecta el borde de la superficie, manda una señal al motor del lado contrario, a través de un circuito temporizado, para que dicho motor gire hacia atrás durante un tiempo determinado. Mientras que dura el temporizado tenemos un motor girando hacia delante y otro girando hacia atrás, por lo tanto el coche gira sobre sí mismo retirándose del borde. Cuando ha pasado el tiempo fijado en el temporizado el motor que giraba hacia atrás vuelve a girar hacia delante, con lo cual el robot avanza en otra dirección. M 57 K BD-135 1K 6V FC 330 µF YO CONTROLO... Material necesario • • • • Una tarjeta de control que haremos nosotros mismos. Cable de conexión entre el ordenador y la tarjeta. Un programa de control que realizaremos con Visual Basic. El esquema eléctrico de la tarjeta de control es el que puede verse en la figura adjunta. El pin n° 2 del TILL 111 lo conectaremos a la masa del puerto paralelo (pines 18 al 25). • El relé inferior es el que encenderá o apagará al motor y el superior el que invertirá el sentido de giro. LED Pin N.o 3 del puerto paralelo R = 330 Masa (pines 18 al 28) Salida MOTOR R = 470 Diodo 1N4148 TILL 111 Pin N.o 2 del puerto paralelo Relé Masa (pines 18 al 28) BC337 (NPN) Masa 8 V Tensión del motor Aplicación didáctica En esta actividad tratamos de controlar el funcionamiento de un motor a través de un ordenador. Programa de control (realizado con Visual Basic) Para realizar el programa con Visual Basic necesitamos una librería de enlace dinámico (archivo dll) para gestionar el puerto paralelo. Hemos utilizado la librería Puertos32.dll (libro de Informática para 1° de Bachillerato). Debemos copiar esta librería en la carpeta Windows. Iniciamos un proyecto EXE y agregamos el siguiente módulo: Option Explicit Declare Function Out Lib "Puertos32.dll" (ByVal Puerto As Integer, ByVal dato As Integer) As Integer Public Puerto As Integer Public dato As Integer Public Salida As Integer Public Const LPT1 = &H378 '888 Creamos 4 botones y les asignamos los códigos que se pueden ver en la tabla: Botón Derecha Private Sub Command1_Clic() Salida Out(LPT1, 1) End Sub Botón Izquierda End Sub Private Sub Command2_Click() Salida=Out(LPT1,3) End Sub Botón Paro Private Sub Command3_Click() Salida Out(LPT1,0) End Sub Botón Salir Private Sub Command4_Click() Salida Out(LPT1,0) End End Sub