Entendiendo los Fundamentos del Equilibrio 101
Anuncio

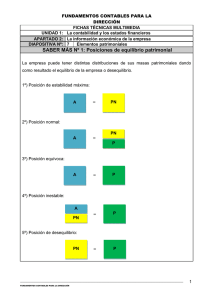
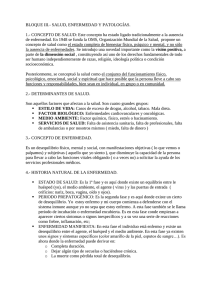
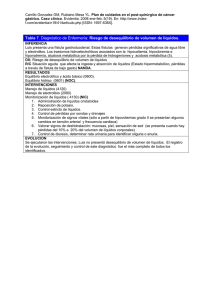
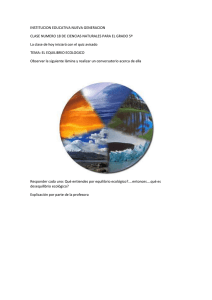
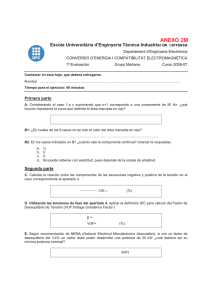
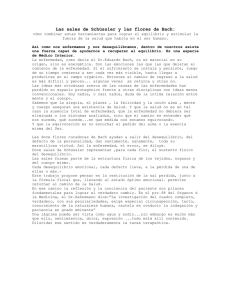
Entendiendo los Fundamentos del Equilibrio y de las Técnicas de Medición Gary K. Grim Bruce J. Mitchell Derechos de © 2014 Balance Technology Inc. No se distribuya ni se duplique sin el consentimiento Escrito de BTI (Balance Technology Inc.) EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Acerca de Nosotros Con la sede cerca de Ann Arbor, Michigan (EEUU), Balance Technology Inc BTI es una empresa de equipo y servicios precisos de medición y de prueba que prospera y tiene una gran presencia doméstica e internacional. Desde 1968, BTI ha establecido el estándar en sistemas industriales de medición y de prueba precisas. Con más de 13.000 sistemas distribuidos globalmente, la dedicación de nuestro equipo a la satisfacción de nuestros clientes y a innovaciones técnicas ha construido nuestra reputación como líder de la industria y socio fiable. La Sede de BTI. Nuestro equipo siempre se diseña y se fabrica en los EEUU. BTI diseña y fabrica una línea completa de equipo de medición y de prueba de precisión industrial, incluyendo equipo de equilibrio estático y dinámico, calibres dimensionales, equipo de centrado de masa, sistemas de detección de grietas por corriente de Foucault, equipo de medición del acabado de superficies, equipo de NVH (Ruido, Vibración, y Dureza), bancos de pruebas funcionales, giradores, equipo de prueba de motores, y sistemas de medición de frecuencias de resonancia. También diseñamos y fabricamos sistemas de pruebas especiales, incluyendo torsión para girar, retraso, juego axial, y equipo de pruebas destructoras. Además, la capacidad única que tiene BTI de combinar las tecnologías susodichas en un solo sistema totalmente integrado les permite a nuestros clientes reducir inversión de capital, mejorar la calidad de productos, y minimizar requisitos de espacio. Permita que nuestro equipo de más de 50 ingenieros diseñe una solución única para sus requisitos específicos. Además, nuestro equipo de servicio de medición y pruebas (M & T Services) le puede ayudar con todo desde pruebas de prototipos, trabajo de investigación y desarrollo (R&D), y certificación de maestra hasta corriendo producción a niveles pequeños y medianos. Nuestro departamento de servicio está disponible las 24 horas, 365 días del año. También ofrecemos diagnósticos remotos para actualizaciones de software a “tiempo real” EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 3 of 15 Lo que hacemos… Diseñamos equipo único para todos sus requisitos de Medición y de Pruebas Precisas Máquinas de equilibrio Calibres Dimensionales Medición del acabado superficial NVH (Ruido, Vibración, y Dureza) y Sistemas Especializados Detección de Grietas Equipo Combinado EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 4 of 15 ENTENDIENDO LOS FUNDAMENTOS DEL EQUILIBRIO Y DE LA TÉCNICA DE MEDICIÓN Gary K. Grim, Bruce J. Mitchell ¿Por qué equilibrar? Todos los componentes giratorios disfrutan de mejoras significativas en calidad y en rendimiento si se equilibran. Equilibrar es el proceso de minimizar vibración, ruido y desgaste a cuerpos giratorios. Esto se logra al reducir las fuerzas centrífugas a través de alinear el eje de inercia principal al eje geométrico por medio de agregar o remover material. Para entender los fundamentos del equilibrio, se necesita definir los siguientes términos fundamentales: TÉRMINOS FUNDAMENTALES CENTRO DE GRAVEDAD Donde a es la aceleración debida a la gravedad, la fuerza resultante es el peso del cuerpo. Por esta razón el término centro de gravedad se puede considerar como el centro de masa. Su alineamiento diferiría sólo en cuerpos grandes donde la fuerza gravitacional de la tierra no es la misma para todos los componentes del cuerpo. Considerando que los puntos susodichos aplican para la mayoría de los cuerpos, hace sentido que los equilibradores estáticos (los que no giran), los cuales sólo pueden medir el centro de gravedad, pueden localizar el centro de masa. Información adicional sobre el equilibrio estático se revisará en las páginas siguientes. CENTRO DE MASA El centro de masa es el punto en un cuerpo donde, si toda la masa estuviera concentrada en un punto, el cuerpo actuaría igual para cualquier dirección o aceleración lineal. Si un vector de fuerza pasa a través de este punto, el cuerpo se moverá en una línea recta, sin girar. La segunda ley del movimiento de Newton describe este movimiento como F = ma, donde la suma de fuerzas F, actuando sobre un cuerpo de masa m, multiplicado por su aceleración es: F = ma EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 5 of 15 EJES GEOMÉTRICOS El eje geométrico se refiere también como el eje de la barra o el eje dirigido de rotación. Este eje de rotación se determina por la superficie de los rodamientos rotatorios, la cual existe en la pieza de trabajo, o por la superficie del montaje. Una superficie de montaje adecuada establece el centro de rotación en el plano del centro de masa (el punto en el cual el centro de masa está localizado). EJE DE INERCIA PRINCIPAL Cuando una parte no tiene forma de disco y tiene longitud por el eje de rotación, gira sobre un espacio libre sobre una línea. Esta línea se llama “eje principal de inercia”, y el centro de masa es un punto sobre esta línea. La parte requiere energía para hacerle mover y causarle que gire sobre otro eje de inercia. Un ejemplo sería lanzar correctamente un balón de fútbol americano o disparar una bala desde un rifle. Cuando el eje de inercia principal coincide con el eje de rotación, la parte gira sin fuerzas de desequilibrio. Es decir que el desequilibrio estático y de acoplamiento serán iguales a cero. Para resumir, un estado de equilibrio es una condición física que existe si hay una distribución de masa totalmente uniforme. El equilibrio estático existe si el centro de masa está sobre el eje de rotación. Además, el equilibrio estático y de acoplamiento existe si el eje principal de inercia coincide con el eje de rotación. TIPOS DE DESEQUILIBRIO La localización del centro de masa y del eje principal de inercia se determina por el efecto de contrapeso de cada elemento de la parte. Sin embargo, cualquier condición de desequilibrio se puede corregir añadiendo o quitando peso a radios y ángulos particulares. De hecho, la cantidad de desequilibrio, U, se puede definir correctamente como un peso w, multiplicado por un radio r: U = wr El desequilibrio estático también se puede determinar sabiendo el peso de la parte y el desplazamiento del centro de masa del eje geométrico. En este caso U es igual al peso w de la pieza de trabajo multiplicado por el desplazamiento e: U = we EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 6 of 15 DESEQUILIBRIO ESTÁTICO Es una condición que existe si el centro de masa no está sobre el eje de rotación. También se puede explicar cómo la condición que existe si el eje principal de inercia es paralelo al eje de rotación. El desequilibrio estático típicamente se mide y se corrige con partes en forma de disco muy estrechas como un disco volador. Para corregir el desequilibrio estático se requiere sólo una corrección. La cantidad de desequilibrio es el producto del peso por el radio. Este tipo de desequilibrio es un vector, y por eso, se debe corregir con un peso conocido a un ángulo particular. Fuerza de desequilibrio es otro nombre para el desequilibrio estático. Como se discutió anteriormente, una pieza de trabajo está en equilibrio si el centro de masa está sobre el eje de rotación. Cuando estas condiciones existen, la parte puede girar sobre este eje sin crear fuerza inercial sobre el centro de masa. Partes como punteros de velocímetro o movimientos de medición analógicos se benefician al estar en equilibrio estático porque la fuerza de gravedad no creará un momento más grande a un ángulo que a otro, y entonces su movimiento será lineal. El siguiente dibujo representa un ejemplo de desequilibrio estático. C.G. Eje principal de Inercia Eje del eje DESEQUILIBRIO DE ACOPLAMIENTO Es una condición específica que existe si el eje principal de inercia no es paralelo con el eje de rotación. Para corregir el desequilibrio de acoplamiento, 2 pesos iguales se deben añadir o remover de la pieza de trabajo en ángulos de separación de 180 grados en 2 planos de corrección. La distancia entre estos 2 planos se llama el “brazo del acoplamiento”. El desequilibrio del acoplamiento es un vector que describe la corrección. Es común para los equilibradores desplegar el vector del desequilibrio izquierdo de una corrección de acoplamiento para aplicarlo en ambos planos (izquierdo y derecho). El desequilibrio del acoplamiento se expresa como U = wrd, donde U es la cantidad de desequilibrio, w es el peso, r es el radio, y d es la longitud del brazo del acoplamiento. El desequilibrio del acoplamiento se defina como la masa por su longitud al cuadrado. Unidades comunes para el desequilibrio del acoplamiento son g-mm2 u oz-in2. El ángulo de corrección está en el plano izquierdo (por favor notar que en mecánica, el ángulo es perpendicular al plano del radio del vector y el vector del brazo de acoplamiento. Es un ángulo de 90 grados en relación a la localización del peso). El desequilibrio de acoplamiento EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 7 of 15 se puede corregir en cualquiera de los 2 planos, pero primero la cantidad tiene que ser dividida por la distancia entre los planos escogidos. Mientras el desequilibrio estático se puede medir con un equilibrador que no gira, es necesario que se mida el desequilibrio de acoplamiento con uno que gire. Una combinación de fuerza completamente especifica todo el desequilibrio que exista en una parte. Especificar el desequilibrio de esta manera requiere 3 correcciones de peso individuales. El siguiente dibujo representa un ejemplo de desequilibrio de acoplamiento. Principal Eje de Inercia Eje del eje DESEQUILIBRIO EN 2 PLANOS También se defina como el desequilibrio dinámico. Es una suma vectorial de fuerza y desequilibrio de acoplamiento. Para corregir 2 planos de desequilibrio se requieren 2 pesos de corrección desiguales en 2 planos distintos a 2 ángulos desiguales. La especificación de desequilibrio solamente está completa si se sabe el lugar del eje axial del plano de corrección. El desequilibrio dinámico o desequilibrio en 2 planos especifica todo el desequilibrio que exista en una pieza de trabajo. Este tipo de desequilibrio sólo se puede medir en un equilibrador giratorio que detecte la fuerza centrífuga debida al componente de acoplamiento de desequilibrio. DESEQUILIBRIO DINÁMICO Es el término que especifica un equilibrador que gira y mide fuerza centrífuga. Es necesario usar este tipo de equilibrador cuando se mide el acoplamiento, o 2 planos de desequilibrio. Típicamente esto se usa para dar más sensibilidad a la medición estática o fuerza de desequilibrio. El siguiente dibujo representa un ejemplo de desequilibrio dinámico. Principal Eje de Inercia Eje del eje EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 8 of 15 UNIDADES DE DESEQUILIBRIO El desequilibrio se puede definir como el peso de la masa que se tiene que agregar o remover a un radio de corrección. Las unidades de peso pueden ser cualquier unidad conveniente de medición que toma en cuenta el peso del equipo disponible y el tamaño de toda la unidad de medición. Gramos (g), onzas (oz) y kilogramos (kg) son las unidades más comunes. De vez en cuando los Newton (N) se usan, pero para uso práctico se deben convertir en unidades de peso disponibles. Las unidades de longitud usualmente corresponden a las unidades de longitud de los dibujos de los estándares de los fabricantes. Las más comunes son pulgadas (in), milímetros (mm), centímetros (cm) y metros (m). Las unidades más comunes para especificar desequilibrio son onza-pulgada (oz-in), gramopulgada (g-in), gramo-milímetro (g-mm), gramo-centímetro (g-cm) y kilogramo-metro (kg-m). MOVIMIENTO DE PARTES DESEQUILIBRADOS ¿Cuál es el efecto de desequilibrio en una parte rotatoria? Por un lado, si está montada sobre una superficie rígida, una fuerza dañina puede existir en su plano de soporte o superficie de montaje para restringir la parte. Por otro lado, si el montaje es flexible, la parte y el montaje sentirán vibración significativa. En una aplicación normal, hay una combinación de ambas. Considerar un desequilibrio sobre un disco delgado montado sobre una suspensión de un resorte sencillo. El resorte responderá diferente dependiendo de la velocidad con la cual el disco gira. A velocidades muy bajas (menos de la mitad de la frecuencia resonante) el desequilibrio del disco genera muy poca fuerza centrífuga, causando una menor detección del resorte y un movimiento pequeño de la masa. Con cuerpos rígidos el desequilibrio se mantiene igual aunque un incremento de velocidad causa incrementos en fuerza y movimiento. La fuerza incrementa exponencialmente por el cuadrado del cambio en velocidad; 2 veces la velocidad es igual a 4 veces la fuerza y 4 veces el movimiento. En otras palabras, la fuerza es proporcional al cuadrado de la velocidad de rotación. Un cálculo para estimar la fuerza es: F = 1.77 U (rpm / 1000)2 FUERZA CENTRÍFUGA Causada por 0.001 oz-in de desbalance a varias velocidades. EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 9 of 15 La fuerza centrífuga del desequilibrio es hacia fuera del centro de la parte, en donde se localiza el peso. En un equilibrador de suspensión dura la fuerza dobla un resorte rígido causando que el punto alto de vibración ocurra en donde se localiza el peso. A velocidades 2 veces o más grandes que la frecuencia de la masa del resorte, la fuerza de desequilibrio es mucho más grande que la del resorte. El movimiento de la parte de desequilibrio se limita por su propia inercia. La parte gira sobre el centro de la masa a cualquier velocidad en este rango. El punto máximo de la dislocación es igual al centro de masa excéntrica, e, y es por eso Xp = e, la fórmula para el punto máximo de dislocación Xp es el desequilibrio dividido por el peso de la parte. Xp = U / peso de la parte A velocidades cerca de la frecuencia de resonancia, la amplitud de movimiento puede ser mucho más grande que la a velocidades más altas aunque la fuerza de desbalance es menor. La resonancia existe cuando la fuerza resistente de la inercia de la parte es igual y opuesta a la fuerza resistente del resorte. La única fuerza resistente se debe a la amortiguación mecánica. Cuando la amortiguación mecánica está baja, la amplitud de vibración puede ser 50 veces más grande en resonancia. En el pasado algunas empresas de equilibrio corrían sus equilibradores a esta velocidad para ganar sensibilidad. De cualquier forma, con la gran mejora de la electrónica que tenemos hoy en día, este rango de velocidad se considera impredecible y típicamente se evita. Las partes que tienen longitud por el eje de rotación, también responden similares cuando se soporta su rotación en un sistema de suspensión a cada lado. A velocidades menores de la resonancia (en una suspensión dura), la fuerza generada por la fuerza centrífuga se divide entre los 2 puntos de la suspensión; no obstante, una carga estática simplemente se divide entre 2 puntos del fulcro. A velocidades mayores de las de la resonancia (en una suspensión suave) la parte gira, no sólo sobre el centro de masa, pero también sobre el eje principal de inercia. El punto más alto de dislocación en cualquier punto a lo largo de la parte es igual a la distancia entre el eje de inercia principal y el eje geométrico. Se debe anotar que puede haber varias velocidades de resonancia. La resonancia de la masa total sobre un sistema de resorte causará que la parte se traslade. A una velocidad diferente, la inercia rotacional de la parte y el sistema del resorte causarán que gire sobre su eje vertical. Esto es otra razón para evitar este rango de velocidad. Los equilibradores estáticos no giran la parte para medir desequilibrio. En vez, su operación se basa en la gravedad que genera una fuerza hacia abajo del centro de gravedad. Un EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 10 of 15 ejemplo de una forma vieja de un equilibrador estático es un sistema de formas de nivelación. Aunque consume mucho tiempo, este método sigue siendo eficaz en reducir al máximo el desequilibrio estático. La fuerza hacia abajo del centro de gravedad hará que la pieza gire hasta que el centro de gravedad esté directamente debajo de la superficie donde se mide, lo que identifica la localización del punto que pesa más. Típicamente con el equilibrio de formas de nivelación la cantidad de desequilibrio no se sabe y la parte se corrige por ensayo y error hasta que la parte ya no gire más. Sin embargo, es posible medir la cantidad de desequilibrio sobre un equilibrador de formas de nivelación. Esto se logra al rotar el punto que pesa más 90 grados, y entonces medir el momento de la torsión. Históricamente, esto comúnmente se lograba al usar una escala de gancho para determinar la fuerza a un radio conocido. Los equilibradores estáticos modernos miden partes con el eje rotatorio de las piezas en orientación vertical, directamente sobre el punto del eje. Este tipo de medidor puede detectar rápidamente la cantidad de desequilibrio y ángulo asociado con ello. La gravedad que actúa en el centro de masa crea un momento en la pieza, lo que inclina al medidor. Los equilibradores pueden ser divididos en 2 tipos dependiendo de cómo reaccionan a este momento de desequilibrio: aquellos con eje libre donde la cantidad de inclinación se mide como una indicación directa de la cantidad de desequilibrio, y aquellos que restringen la cantidad de inclinación y miden el momento del desequilibrio. Los equilibradores estáticos que tienen eje libre no ofrecen resistencia a la fuerza hacia debajo del centro de gravedad. Es necesario que el centro de gravedad de la pieza de trabajo y del herramental juntos estén a propia distancia por debajo del punto del eje. La distancia del centro de gravedad que está debajo del punto del eje determina la sensibilidad el equilibrador. Esta distancia típicamente se determina por un contrapeso ajustable conectado a los herramentales por debajo del eje. Sin una parte situada sobre un sistema nivelado de herramientas, el centro de gravedad está inicialmente por debajo del punto del eje. Cuando una parte desequilibrada está puesta sobre el herramental, causa que el centro de gravedad se eleve y cambie lejos del centro en la dirección del desequilibrio. El momento causado por la gravedad sobre un nuevo centro de gravedad causa que el herramental se incline, hasta que el nuevo centro de gravedad esté directamente por debajo del eje mientras se inclina el brazo del momento y, como resultado el momento se reduce a cero. La cantidad de inclinación se determina al medir la distancia entre el brazo extendido del herramental y la base de la máquina. La cantidad de inclinación es proporcional a la cantidad de desequilibrio de la parte. EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 11 of 15 Medir el desequilibrio con un equilibrador estático generalmente se logra con dos LVDTs orientados a 90 grados con respeto al otro. Un eje típico consiste en puntos en una ranura, una bola sobre un yunque, una flexión en forma de cilindro baja tensión, rodamiento esféricos hidráulicos y rodamientos esféricos neumáticos. Cada uno tiene problemas asociados con mantener el eje libre: el sistema de punto de contacto mecánico debe ser mecánicamente protegido para prevenir planos rectos en la bola, o un punto de abolladura en el yunque; la flexión del alambre se puede doblar o romper si no se protege bien; los soportes esféricos deben estar perfectamente limpios para evitar que se arrastren. Dos preocupaciones adicionales son que la sensibilidad depende del peso de la parte y que el eje debe ser protegido para prevenir daño que pueda afectar el funcionamiento del equilibrador. Sin embargo, hay una mejor alternativa que supera estos problemas que se llama el equilibrador de eje rígido. Con este tipo de equilibrador, el eje es un poste que actúa como un resorte rígido. El momento debido al desequilibrio dobla el poste una pequeña cantidad y la inclinación se mide para determinar la cantidad de desequilibrio. Con un equilibrador de eje rígido la calibración no es afectada por el peso de la parte y el equilibrador es exacto, sencillo y súper robusto. EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 12 of 15 EQUILIBRADORES DINÁMICOS Los equilibradores estáticos susodichos dependen totalmente de la fuerza de gravedad en el centro de gravedad. Consecuentemente, con un equilibrador estático, no es posible medir el desequilibrio del componente de acoplamiento. Para detectar el desequilibrio del acoplamiento, hay que girar la parte. Tal equilibrador se llama centrífugo o dinámico. Los equilibradores dinámicos consisten de 2 tipos: suspensión suave y suspensión rígida. Los equilibradores dinámicos más comunes sujetan la pieza de trabajo con una barra como eje horizontal. Existen, sin embargo, equilibradores suaves y rígidos verticales también. Por favor ver el diagrama en la página siguiente, el cual tiene un comparativo de un sistema de suspensión suave y rígida. EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 13 of 15 SUSPENSIÓN DURA vs. SUSPENSIÓN SUAVE S u s p e D I S L O C A C I Ó N n s Soporte rígido i Soporte suave o n R e s o n a n c i a .5 1 2 3 4 5 6 7 VELOCIDAD NORMALIZADA DISLOCACIÓN DE SUSPENSIÓN DE MÁQUINA DE EQUILIBRIO EXCITADA POR UN DESEQUILIBRIO CONSTANTE A VARIAS VELOCIDADES EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 14 of 15 EQUILIBRADORES DINÁMICOS DE SUSPENSIÓN SUAVE También se refieren como equilibradores de soporte suave. Los equilibradores de suspensión suave operan a frecuencias mayores de las de resonancia de la suspensión del equilibrador. Con este tipo de equilibradores la parte no tiene fuerzas en el plano horizontal y gira sobre el eje principal de inercia. La amplitud de la vibración se mide en el punto de soporte para determinar la cantidad de desequilibrio. Hay problemas con usar la información medida para corregir el equilibrio de una parte. Cada parte individual tiene su propio factor de calibración y su propia interferencia de información de corrección. Es decir que, si una parte equilibrada tiene un peso de desequilibrio agregado en un plano de corrección, la información necesaria para predecir la nueva línea de eje vertical no está disponible. Un peso causa vibración en ambas suspensiones y la amplitud y el radio de estas 2 vibraciones no se saben. Cuando la influencia de un peso en un segundo plano se agrega, no es posible separar la información de los 2 pesos. Para determinar la calibración y el factor de interferencia, los pesos de ensayo deben ser agregados individualmente en cada plano, y la reacción medida. Cuando se usa una parte desequilibrada el efecto de desequilibrio inicial se debe remover de las mediciones de peso de ensayo. Una vez que se determinen estos factores, cada canal lee sólo el desequilibrio en el plano de la corrección correspondiente. Estos 2 canales entonces tienen lo que se llama separación de plano. La desventaja principal de los equilibradores de suspensión suaves es el requerimiento de giros extras de configuración para calibrar tamaños y pesos distintos de piezas de trabajo. EQUILIBRADORES DINÁMICOS DE SUSPENSION RÍGIDA También se definen como equilibradores de soporte rígidos. Los equilibradores de suspensión rígida operan a velocidades menores de las de la frecuencia de resonancia de las suspensiones. La amplitud de la vibración es pequeña, y la fuerza centrífuga generada por el desequilibrio se mide en la base del soporte. Con un equilibrador de suspensión dura es solamente necesario calibrar la fuerza medida una vez. Esta única calibración típicamente se realiza por el fabricante del equilibrador en su propia planta. Usando la fuerza medida y la velocidad exacta medida, la electrónica del equilibrador puede calcular las correcciones que se requieren en los planos de la base del soporte. Sin embargo, como las correcciones no se pueden medir en los planos de soportes, la información de desequilibrio debe ser traducida a los 2 planos de corrección. Para calcularlo, la localización de los planos de corrección relacionada a los planos de soporte se introduce por el operador cuando se configura el equilibrador para una parte en particular. EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com Page 15 of 15 Aún más ventajas que vienen con calibrar intrínsecamente, los equilibradores de suspensión rígida son: fáciles de usar, seguros de usar, y proveen soporte de trabajo rígido. Con los equilibradores de suspensión rígida es posible proveer soportes que restringen el movimiento de la carga negativa que se puede generar cuando una parte se corre fuera de la base de los soportes. Todos los equilibradores descritos se implementan con electrónicos análogos. Sin embargo, los cálculos básicos requeridos para la separación de planos y traslación de planos requieren circuitos complicados, los cuales alternadamente requieren ajuste y configuración. Los ordenadores electrónicos son ideales para estas aplicaciones. Adicionalmente, los ordenadores pueden memorizar configuraciones de partes para volver a llamarlas fácilmente, recoger datos de desequilibrio, proveer información estadística, y mandar los datos a una impresora o disco duro. RESÚMEN: Virtualmente todos los componentes rotatorios gozan de mejoras significativas en calidad si se equilibran. En el mercado global hoy en día los consumidores buscan los mejores productos disponibles por su dinero. Ellos demandan productos de desempeño máximo, de tamaño mínimo, y de coste bajo. Adicionalmente todo debe ser más pequeño, más eficiente, más poderoso, más ligero, de corrida suave y de mayor duración. Mientras la demanda del consumidor continúa incrementando, los componentes equilibrados mantendrán los ingredientes esenciales para satisfacerla. Equilibrar siempre será una de las maneras más rentables para proveer calidad a los productos de los clientes. EQUIPO Y SERVICIOS PRECISOS DE MEDICIÓN Y DE PRUEBA Balance Technology Inc • 7035 Jomar Drive, Whitmore Lake, MI 48189 • 734-769-2100 • USA www.balancetechnology.com