dise\321o detallado de un banco para el an\301lisis de vibraciones
Anuncio

DISEÑO DETALLADO DE UN BANCO PARA EL ANÁLISIS DE VIBRACIONES
EN UNA ESTRUCTURA ALAR
CAROL ROCÍO ARIAS HERNÁNDEZ
LEIDY VIVIANA COLORADO CARRILLO
LAURA FERNANDA MATEUS RODRÍGUEZ
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA AERONÁUTICA
BOGOTÁ DC.
2007
1
DISEÑO DETALLADO DE UN BANCO PARA EL ANÁLISIS DE VIBRACIONES
EN UNA ESTRUCTURA ALAR
CAROL ROCÍO ARIAS HERNÁNDEZ
LEIDY VIVIANA COLORADO CARRILLO
LAURA FERNANDA MATEUS RODRÍGUEZ
Proyecto final para optar por el título de
Ingeniero Aeronáutico
Asesor
Carlos Bohórquez Ávila
Ingeniero Mecánico
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA AERONÁUTICA
BOGOTÁ DC.
2007
2
Nota de aceptación:
________________________________
________________________________
________________________________
________________________________
________________________________
Firma del presidente del jurado
________________________________
Firma del jurado
________________________________
Firma del jurado
Bogotá 30 de Mayo de 2007
3
A Dios que me dio la fortaleza y sabiduría necesaria para llevar a cabo este
trabajo, a mis padres y hermano que siempre han estado a mi lado durante toda
mi formación académica apoyándome para que cumpliera con lo que algún día me
propuse que fue ser Ingeniería Aeronáutica y a todas las personas que de una u
otra forma contribuyeron a que esta mi primera meta se hiciera realidad.
Laura Fernanda Mateus Rodríguez
A Dios por permitirme dar un paso más en el camino de la vida que me regaló. A
mis padres Luis y Flor Porque me han infundado la perseverancia que los
caracteriza, por el valor y coraje mostrado para salir adelante y por su amor. A mis
hermanos Wilson y Alberto por ayudarme a vivir un mundo diferente; a todas
aquellas personas que creyeron en una Ingeniera y a todas aquellas que no lo
hicieron.
Leidy Viviana Colorado Carrillo
A Dios por brindarme la paciencia necesaria para hacer cada parte de este trabajo
con mucha dedicación y esfuerzo, para que todo saliera de la mejor manera
posible y por darme la fuerza para levantarme cada día a trabajar en mi proyecto
de grado; a mi tirito por sus sabios consejos y por empacarme el almuerzo en la
lonchera cada mañana y no dejarme salir de mi casa sin antes haber comido, por
escuchar atentamente cada una de mis anécdotas del día y por ser un ejemplo a
seguir durante toda mi vida a causa de su alegría, responsabilidad y entrega al
trabajo; a mi papito por hacer el sacrificio de levantarse de madrugada a trabajar,
para así lograr ofrecerme una formación profesional adecuada, por estar
pendiente de mí, guiarme, corregirme, enseñarme y apoyarme siempre y en
general les agradezco a mis padres por su valiosa orientación en el transcurso de
mi vida, por todos los valores y principios que me ayudaron ser la persona que soy
hoy, por creer en mí y por quererme tanto. A mis siete sobrinos por que con cada
uno de ellos he compartido innumerables momentos felices en mi vida, por que
cada vez que los abrazo y los molesto me contagian de una inexplicable e
inmensa alegría que hace parte fundamental de mí existir. A mis hermanos
Emilse, César y Gadier por que a pesar de las distancias siempre están ahí cada
vez que los necesito. A mis compañeras de proyecto de grado por sobrellevar
todas las discusiones que se presentaron a lo largo de este trabajo y en general
de toda la carrera, por aprender a ser un grupo, a tomar decisiones y apoyarnos
mutuamente para cumplir así con nuestras metas. A todos mis amigos por el
apoyo incondicional y a cada uno de los profesores que fueron parte de mi
formación como ingeniera aeronáutica.
Carol Rocío Arias Hernández
4
AGRADECIMIENTOS
Los autores expresan sus agradecimientos a:
Carlos Bohórquez Ávila, ingeniero mecánico y director del proyecto por el aporte
de elementos fundamentales que fueron adquiridos a través de sus enseñanzas,
por su paciencia, comprensión y respaldo incondicional.
Ricardo Ríos Lineros, ingeniero mecánico por su interés en el proyecto y el aporte
de amplios conocimientos en el manejo de los software SOLID EDGE, ANSYS y
ANSYS WORKBENCH.
Iván Darío Gómez, ingeniero mecánico por su orientación acerca de los conceptos
básicos necesarios para comprender el análisis de vibraciones.
Alejandro García Rubiano, ingeniero mecánico por su contribución profesional y
colaboración para hacer posibles las visitas en AEROANDES, que fueron de gran
ayuda para nuestro proyecto.
John Daved Fuentes Mariscal, estudiante de ingeniería mecánica de la
Universidad Nacional por sus asesorías en cuanto a conceptos de diseño de
máquinas y mecanismos.
Y a todos los profesores, familiares y amigos que de una u otra manera
contribuyeron a la realización de este proyecto.
5
CONTENIDO
pág.
INTRODUCCIÓN
20
1. PLANTEAMIENTO DEL PROBLEMA
21
1.1 ANTECEDENTES
21
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
22
1.3 JUSTIFICACIÓN
23
1.4 OBJETIVOS
23
1.4.1 Objetivo general
23
1.4.2 Objetivos específicos
23
1.5 DELIMITACIÓN DEL PROBLEMA
24
1.5.1 Alcances
24
1.5.2 Limitaciones
24
2. MARCO DE REFERENCIA
26
2.1 MARCO CONCEPTUAL
26
6
2.2 MARCO LEGAL O NORMATIVO
27
2.3 MARCO TEÓRICO
28
2.3.1 Vibraciones
28
2.3.2 Características de la vibración
29
2.3.3 Método Rayleigh’s
32
2.3.4 Fatiga
34
3. METODOLOGÍA
38
3.1 ENFONQUE DE LA INVESTIGACIÓN
38
3.2 LÍNEA DE INVESTIGACIÓN
38
3.3 HIPÓTESIS
39
3.4 VARIABLES
39
3.4.1 Variables independientes
39
3.4.2 Variables dependientes
39
4. DESARROLLO INGENIERIL
40
4.1 ESTUDIO ALTERNATIVAS PARA EL DISEÑO DE LA ESTRUCTURA
BASE
40
7
4.1.1 Alternativas de diseño de la estructura base
41
4.2 DISEÑO DE LA ESTRUCTURA BASE
44
4.2.1 Estructura alar
44
4.2.2 Determinación de la carga que soporta la estructura alar
46
4.2.3 Selección del material para el diseño de la estructura base
55
4.2.4 Análisis estático
56
4.2.5 Selección del espesor para la estructura base
58
4.2.6 Cálculo de soldadura
63
4.2.7 Selección de pernos de la estructura base
64
4.3 ESTUDIO DE ALTERNATIVA PARA EL DISEÑO DEL MECANISMO
SIMULADOR DE VIBRACIONES
70
4.3.1 Alternativas de diseño del mecanismo
71
4.4 DISEÑO DEL MECANISMO
74
4.4.1 Cálculo de fuerzas que actúan en el mecanismo
75
4.4.2 Cálculos por fatiga del mecanismo
86
4.4.3 Selección de pernos del mecanismo
97
8
4.4.4 Sistema de sujeción ala-mecanismo para estructuras alares con piel
98
4.5 DISPOSITIVO DE MEDICIÓN DE LAS CARACTERÍSTICAS DE
VIBRACIÓN
99
4.6 ESTUDIO ANALÍTICO
102
4.6.1 Frecuencia natural viga en C
102
4.6.2 Deformación viga en C
104
4.7 ANÁLISIS MODAL
107
4.7.1 Estructura alar 1
107
4.7.2 Estructura alar 2
110
4.7.3 Estructura alar 3
114
4.8 TUTORIAL
117
4.8.1 Tutorial en ANSYS para análisis modal en una estructura alar
117
4.9 ESTUDIO ECONÓMICO
129
4.9.1 Costos materiales
129
4.9.2 Costos de manufactura con suministro de material
130
CONCLUSIONES
134
9
RECOMENDACIONES
136
BIBLIOGRAFÍA
137
ANEXOS
139
10
LISTA DE TABLAS
pág.
Tabla 1 Criterios de selección para la estructura base
44
Tabla 2 Configuración de las vigas en la estructura alar 1
45
Tabla 3 Configuración de las vigas en la estructura alar 2
46
Tabla 4 Configuración de las vigas en la estructura alar 3
46
Tabla 5 Análisis de resultados para determinación de la carga de diseño
52
Tabla 6 Especificaciones de instalación para la varilla HIT-TZ
70
Tabla 7 Criterios de selección para el mecanismo simulador de vibraciones
73
Tabla 8 Selección de materiales del mecanismo
74
Tabla 9 Resultados análisis para posición 0º
82
Tabla 10 Resultados análisis para posición 180º
84
Tabla 11 Resultados análisis para posición 270º
86
Tabla 12 Cálculo del momento de inercia de la viga principal en C
105
Tabla 13 Frecuencias de la estructura alar 1
107
Tabla 14 Frecuencias de la estructura alar 2
111
Tabla 15 Frecuencias de la estructura alar 3
114
Tabla 16 Costos materiales
129
Tabla 17 Costos estructura base
130
Tabla 18 Costos mecanismo
131
Tabla 19 Costos estructura alar
132
11
Tabla 20 Costo total de la construcción del banco
12
132
TABLA DE FIGURAS
Pág.
Figura 1 Aero-structures test wing
21
Figura 2 (AAW) F/A-18 aeronave de prueba
22
Figura 3 Vibración armónica de una masa
29
Figura 4 Velocidad de vibración de una masa
30
Figura 5 Aceleración de la vibración de una masa
30
Figura 6 Frecuencia de la vibración de una masa
31
Figura 7 Fase de una masa en vibración
32
Figura 8 Curva de la deflexión de vigas en voladizo
33
Figura 9 Funciones típicas esfuerzo – tiempo
36
Figura 10 Comparación de los Criterios de fatiga
37
Figura 11 Estructura base 1
42
Figura 12 Estructura base 2
42
Figura 13 Estructura base 3
43
Figura 14 Dimensiones estructura alar 1
45
Figura 15 Dimensiones estructura alar 2
45
Figura 16 Dimensiones estructura alar 3
46
Figura 17 Esfuerzo admisible con carga 500N
47
Figura 18 Deformación con carga 500 N
48
Figura 19 Esfuerzo admisible con carga 120 N
48
13
Figura 20 Deformación con carga 120 N
49
Figura 21 Esfuerzo admisible con carga 150 N
49
Figura 22 Deformación con carga 150 N
50
Figura 23 Esfuerzo admisible con carga 200 N
50
Figura 24 Deformación con carga 200 N
51
Figura 25 Esfuerzo admisible con carga 250 N
51
Figura 26 Deformación con carga 250 N
52
Figura 27 Análisis por fatiga con carga de 250 N (Ansys Workbench)
53
Figura 28 Análisis por fatiga con carga de 150 N (Ansys Workbench)
54
Figura 29 Amplitud constante con carga totalmente alternante
55
Figura 30 Criterio de Goodman
55
Figura 31 Diagrama cuerpo libre viga principal
56
Figura 32 Diagrama cuerpo libre con momentos viga principal
57
Figura 33 Esfuerzo máximo de la estructura base con espesor de 12.7 mm
58
Figura 34 Deformación de la estructura base con espesor de 12.7 mm
59
Figura 35 Diagrama S-N
59
Figura 36 Diagramas S-N acero A36
60
Figura 37 Vida útil de la estructura base con espesor de 12.7 mm
61
Figura 38 Esfuerzo máximo de la estructura base con espesor de 9.525 mm
62
Figura 39 Deformación de la estructura base con espesor de 9.525 mm
62
Figura 40 Vida útil de la estructura base con espesor de 9.525 mm
63
Figura 41 Platina sujetadora
65
Figura 42 Disposición del perno M12
67
14
Figura 43 Anillos (LUGS)
67
Figura 44 Disposición del perno M10
69
Figura 45 Mecanismo 1
72
Figura 46 Mecanismo 2
72
Figura 47 Partes principales del mecanismo
75
Figura 48 Posiciones de la biela
76
Figura 49 Diagrama de velocidades posición 90º
76
Figura 50 Diagrama de aceleraciones posición 90º
77
Figura 51 Diagrama de fuerzas posición 90º
78
Figura 52 Diagrama de velocidades posición 0º
81
Figura 53 Diagrama de aceleraciones posición 0º
81
Figura 54 Diagrama de fuerzas posición 0º
82
Figura 55 Diagrama de velocidades posición 180º
83
Figura 56 Diagrama de aceleraciones posición 180º
83
Figura 57 Diagrama de fuerzas posición 180º
83
Figura 58 Diagrama de velocidades posición 270º
85
Figura 59 Diagrama de aceleraciones posición 270º
85
Figura 60 Diagrama de fuerzas posición 270º
85
Figura 61 Sección transversal de la biela
89
Figura 62 Diagrama de cortante de la biela para 90º
89
Figura 63 Diagrama de momento de la biela para 90º
90
Figura 64 Diagrama de cortante de la biela para 270º
90
Figura 65 Diagrama de momento de la biela para 270º
91
15
Figura 66 Disposición de pernos M5 para la unión ala – mecanismo
98
Figura 67 Disposición de pernos M6 para acople mesa – motor
98
Figura 68 Sujeción para estructuras alares con piel
99
Figura 69 Partes del VIBSCANNER
100
Figura 70 Desplazamiento Vs frecuencia natural
101
Figura 71 Velocidad Vs frecuencia natural
101
Figura 72 Aceleración Vs frecuencia natural
102
Figura 73 Disposición de la viga
102
Figura 74 Frecuencia natural de la viga en C
104
Figura 75 Sección transversal de la viga en C
105
Figura 76 Deformación de la viga en C
106
Figura 77 Estructura alar 1
107
Figura 78 Primer modo de vibración de la estructura alar 1
108
Figura 79 Segundo modo de vibración de la estructura alar 1
108
Figura 80 Tercer modo de vibración de la estructura alar 1
109
Figura 81 Cuarto modo de vibración de la estructura alar 1
109
Figura 82 Quinto modo de vibración de la estructura alar 1
110
Figura 83 Estructura alar 2
110
Figura 84 Primer modo de vibración de la estructura alar 2
111
Figura 85 Segundo modo de vibración de la estructura alar 2
112
Figura 86 Tercer modo de vibración de la estructura alar 2
112
Figura 87 Cuarto modo de vibración de la estructura alar 2
113
Figura 88 Quinto modo de vibración de la estructura alar 2
113
16
Figura 89 Estructura alar 3
114
Figura 90 Primer modo de vibración de la estructura alar 3
115
Figura 91 Segundo modo de vibración de la estructura alar 3
115
Figura 92 Tercer modo de vibración de la estructura alar 3
116
Figura 93 Cuarto modo de vibración de la estructura alar 3
116
Figura 94 Quinto modo de vibración de la estructura alar 3
117
17
TABLA DE ANEXOS
Pág.
Anexo A Propiedades mecánicas del aluminio 2024-T3
139
Anexo B Propiedades de los aceros ASTM
140
Anexo C Propiedades del metal soldante
141
Anexo D Características de los electrodos
142
Anexo E Características de la rosca de paso fino y de paso basto
143
Anexo F Dimensiones de tuercas
144
Anexo G Dimensiones de pernos de cabeza cuadrada o hexagonal
145
Anexo H Propiedades del material para HY-150 adhesivo curado
146
Anexo I Factor de concentración de esfuerzos geométricos Kt a tensión
axial.
147
Anexo J Constante de Neuber para aceros
148
Anexo K Factor de concentración de esfuerzos geométricos Kt a flexión
149
Anexo L Coeficiente para la ecuación del factor superficial
150
Anexo M Manual de operación y mantenimiento
151
Anexo N Cálculos de la potencia
168
Anexo O Planos estructura base y mecanismo
169
18
GLOSARIO
NODO: Cada uno de los puntos que permanecen fijos en un cuerpo vibrante
PANDEO: Torcerse o combarse una cosa alabeándose por el medio.
ENMALLADO: Tipo de división usada en el preproceso del programa de
elementos finitos ANSYS.
BORDE DE SALIDA: borde posterior del ala por donde el flujo de aire perturbado
por el ala retorna a la corriente libre.
BORDE DE ATAQUE: borde delantero del ala, o sea la línea que une la parte
anterior de todos los perfiles que forman el ala; o dicho de otra manera es la parte
del ala que primero toma contacto con el flujo del aire.
CICLO: periodo después del cual se repiten los mismos fenómenos en el mismo
orden.
19
INTRODUCCIÓN
Este proyecto consiste en el diseño detallado de un banco para el análisis de
vibraciones en estructuras alares con fines académicos, ya que en el campo
aeronáutico este efecto puede ocasionar el aumento de esfuerzos y tensiones así
como daños por fatiga en los materiales, lo cual afecta la seguridad en cualquier
aeronave.
La realización de este diseño pretende ampliar los conocimientos acerca del
fenómeno de vibraciones y a la vez proporcionar herramientas, que faciliten el
desarrollo de nuevos proyectos de investigación.
La fase inicial de este proyecto consiste en la recopilación de información teórica
acerca del estudio de vibraciones, a partir de la cual se determinan las alternativas
de diseño y se selecciona la más adecuada. La siguiente fase consiste en el
diseño detallado del banco, seguido de un proceso analítico y un modelamiento
experimental basado en el software de elementos finitos ANSYS. Finalmente se
proporcionan tutoriales para dicho modelamiento, con los cuales se pueden
obtener unos resultados de gran utilidad para el análisis de vibraciones en
estructuras alares.
Teniendo en cuenta lo mencionado anteriormente, el documento suministra planos
detallados, que no presentarán mayores dificultades para cualquier entidad o
persona que desee realizar su eventual construcción.
20
1. PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES
A partir de las investigaciones realizadas acerca de los bancos de análisis de
vibraciones existentes a nivel internacional, encontramos diferentes métodos para
realizar estudios tanto en componentes mecánicos como en estructuras, más
específicamente en alas. Los cuales son:
•
El Banco para el análisis de vibraciones paramétricas que fue construido por
Carlos Sandoval Mercado, puede ser utilizado para: “Vibraciones en ejes
rotativos con sección transversal no circular, péndulo excitada, circuito eléctrico
con inducción variable, pandeo por excitación variable, disco excitado
angularmente, comportamiento dinámico en vibración tubular por flujo inducido,
control vibratorio en rotor de helicóptero”1.
•
El Aero-structures Test Wing (ATW) fue un experimento efectuado por la
NASA mediante el cual; actuadores piezoeléctricos fueron movidos a diferentes
magnitudes y niveles de frecuencia, para inducir vibraciones en el ala durante
el vuelo con el fin de determinar las propiedades de estabilidad de la aeronave
y predecir así la aparición del flutter”2.
Figura 1. Aero-structures Test Wing
Fuente: http://www.nasa.gov/
1
SANDOVAL MERCADO, Carlos, Diseño y construcción de un banco para el análisis de
vibraciones paramétricas. Puebla México 2003
2
http://nctn.hq.nasa.gov/innovation/innovation94/5-aerotech2.html
21
•
El VIBSCANNER es un instrumento que mediante la medición de vibraciones
permite diagnosticar el desgaste de las partes móviles de una máquina o
estructura y también guardar datos de manera periódica3.
•
El ensayo de vibración en tierra e integración de modo estructural en el Active
Aeroelastic Wing (AAW) F/A-18A de la aeronave de prueba consiste en:
El F-18 descansa sobre tres grandes bolsas de aire, mientras que
agitadores electromecánicos inducen vibraciones en el ala variando
amplitudes y frecuencias. Los instrumentos de ensayo miden como
reacciona la estructura cuando dichas vibraciones se propagan a través
de la aeronave para “Determinar si los efectos adversos son
amortiguados de la manera esperada” dice Besette. “Los datos son
utilizados para confirmar los modelos de flutter y la integración de los
sistemas de control de vuelo con la elasticidad estructural de la
aeronave”4
Figura 2. (AAW) F/A-18 aeronave de prueba
Fuente: http://www.nasa.gov/centers/dryden/news/NewsReleases/2002/02-50.html
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
Es de vital importancia para un ingeniero aeronáutico, saber cuales son las
consecuencias que se generan en el diseño de una aeronave, al no tener en
cuenta el estudio de vibraciones. Por este motivo surge la necesidad de plantear el
diseño de un banco para el análisis de vibraciones y así contribuir con el desarrollo
del programa de ingeniería aeronáutica en la institución
3
4
www.pruftechnik.com
http://www.nasa.gov/centers/dryden/news/NewsReleases/2002/02-50.html
22
1.3 JUSTIFICACIÓN
La realización de este proyecto busca implementar nuevos conocimientos en el
tema de vibraciones, puesto que la universidad no cuenta con los elementos
apropiados para la profundización del tema mencionado; afectando directamente
tanto a docentes como a estudiantes.
Para lograr un diseño apropiado se cuenta con algunas fuentes primarias de
información que se pueden conseguir con facilidad y la información que requiera
especificaciones detalladas se podrá investigar con los recursos humanos
disponibles en la institución y fuera de ella. Adicionalmente se cuenta con
herramientas técnicas, físicas y económicas; como las licencias académicas de
ANSYS y ANSYS WORKBENCH con caducidad de tres meses, haciendo que el
proyecto sea viable.
Todos los conocimientos adquiridos en el desarrollo del proyecto, se dirigen hacia
la implementación de un laboratorio, con el cual toda la comunidad universitaria se
beneficia, ya que pueden suplir las falencias que se presentan en el transcurso de
la formación académica, acerca del fenómeno de vibraciones en estructuras.
1.4 OBJETIVOS
1.4.1 Objetivo general
Diseñar un banco para el análisis de vibraciones en una estructura alar
1.4.2 Objetivos específicos
Investigar los antecedentes nacionales y mundiales.
Proponer las alternativas de diseño.
Analizar las alternativas de diseño.
Diseñar la alternativa seleccionada.
Desarrollar analíticamente los ejemplos a trabajar en el banco
Realizar los ejemplos en el software ANSYS y comparar los resultados.
23
Desarrollar los tutoriales para emplear el software que permita el análisis de
vibraciones.
Realizar la evaluación económica del proyecto.
Realizar los manuales de mantenimiento y operación del banco.
Realizar los planos de fabricación del banco.
1.5 DELIMITACIÓN DEL PROBLEMA
1.5.1 Alcances El diseño detallado del banco se realiza únicamente para fines
pedagógicos de la universidad. Si este se construye, las pruebas que se lleven a
cabo en el mismo, no tendrán validez para el proceso de certificación de
aeronaves.
Se proporciona el manual de operación y mantenimiento del banco, sujeto a
modificación en la etapa de construcción.
Finalizado el trabajo de investigación, se presentan los planos detallados, los
resultados analizados mediante un programa de elementos finitos ANSYS y los
cálculos necesarios para el diseño detallado del banco.
El impacto que se tendrá con el diseño de este banco será de carácter científico,
tecnológico y social, ya que aumenta el nivel de conocimientos de todas aquellas
personas que deseen aplicarlo en nuevas investigaciones o en su construcción.
1.5.2 Limitaciones En esta investigación sólo se contempla el diseño detallado
del banco, quedando a criterio de la universidad la construcción del mismo.
El diseño se realizará para tres estructuras alares rectas sin cuerpos de control,
con envergadura de tres metros y un perfil específico.
Las dimensiones del banco están delimitadas teniendo en cuenta el espacio
sugerido por la universidad (7.40 m X 4.15 m), para la posible ubicación del
mismo.
24
En el banco sólo se simulan los movimientos vertical y rotacional, debido a que el
espacio es reducido para desplazar el mecanismo que simula el movimiento
horizontal del elemento a estudiar.
25
2. MARCO DE REFERENCIA
2.1 MARCO CONCEPTUAL
• Estructura alar: Es el elemento primordial de cualquier aeronave. En
ellas es donde se originan las fuerzas que hacen posible el vuelo.
Consisten básicamente en largueros o vigas, costillas y algunas veces
de larguerillos. Los largueros o vigas son los elementos estructurales
que soportan en última instancia la carga del ala, estas se extienden a lo
largo de la envergadura del ala. La mayoría de las alas tienen dos vigas,
delantera y trasera pero algunas alas pueden tener hasta cinco.
Las costillas cruzan las vigas y se extienden entre los bordes de ataque
y de salida del ala. Las costillas de formación apoyan la cubierta del ala
y le dan la forma. Los larguerillos se encuentran en algunos planos,
cruzan la longitud del ala y pueden estar encima o debajo de las vigas o
de las costillas.
• Ala en voladizo: Consigue su fijación mediante elementos
estructurales internos. Es un ala limpia desde su encastre en el fuselaje
hasta su extremo, sin soporte visible alguno y se usa en la mayor parte
de los aviones.
• Perfil: Es la forma de la sección de ala, es decir lo que veríamos si
cortáramos esta transversalmente. Salvo en el caso de las alas
rectangulares en que todos los perfiles son iguales, lo habitual es que
los perfiles que componen un ala sean diferentes; se van haciendo más
pequeños y estrechos hacia los extremos del ala.
• Cuerda: Es la línea recta imaginaria trazada entre los bordes de
ataque y de salida de cada perfil.
• Envergadura: Distancia entre los dos extremos de las alas. Por
simple geometría, si multiplicamos la envergadura por la cuerda media
debemos obtener la superficie alar5.
5
http://inicia.es/de/vuelo/PBV/PBV14.html
26
• Solid Edge: Es un sistema de diseño asistido por ordenador (CAD) para el
modelado de conjuntos y piezas mecánicas y la producción de planos6.
• Agujeros Aligeradores: “Estos agujeros se encuentran a lo largo de las
costillas y su función principal es la de aligerar el peso; aumentar la rigidez de la
estructura y además sirven para distribuir las líneas hidráulicas, neumáticas y
cableado en general a través de los mismos”7.
• Modo de Vibración: Es un patrón o forma característica en el que
vibrará un sistema mecánico. La mayoría de los sistemas tienen muchos
modos de vibración y es la tarea del análisis modal determinar la forma
de esos modos. La vibración de una estructura es siempre una
combinación o una mezcla de todos los modos de vibración. Pero no
todos están excitados al mismo grado. Por ejemplo, si se toca una
campana suavemente, lo primero que se va oír es el modo fundamental
de vibración, pero si se la toca más fuerte, otros modos son excitados y
se oyen los parciales superiores del tono.
• Frecuencia Natural: Es la frecuencia a la que un sistema seguirá
vibrando, después de que se quita la señal de excitación.
• Resonancia: La resonancia es un estado de operación en el que una
frecuencia de excitación se encuentra cerca de una frecuencia natural
de la estructura. Una estructura típica tendrá muchas frecuencias
naturales. Cuando ocurre la resonancia, los niveles de vibración que
resultan pueden ser muy altos y pueden causar daños muy
rápidamente8.
2.2 MARCO LEGAL O NORMATIVO
Respecto a las estructuras, existen normativas, tales como ASA 95-1990 ó ANSI
S2.47: "American National Standard. Vibration of Buildings. Guidelines for
the measurement of vibrations and evaluation of their effects on buildings".
6
Software Solid Edge versión 19
FLABEL, Jean Claude, Practical Stress Analisys for Desing Engineers 1997. p553
8
http://www.dliengineering.com/vibman-spanish/queesvibracin.htm
7
27
Esta normativa no da valores numéricos que permitan la evaluación de la
severidad de la vibración, es solamente cualitativa; indica los diferentes factores
que deben ser considerados para su evaluación; como tomar en cuenta los
diferentes tipos de estructuras o edificios existentes; las magnitudes y métodos de
medición que pueden ser usados y los diferentes procedimientos de cálculo a
utilizar para evaluar la vibraciones medidas.
Respecto a las personas, la norma más importante es la ISO 2631: "Mechanical
vibration and shock.Evaluation of human exposure to whole-body vibration”.
Este estándar define y da valores numéricos para los límites de exposición a los
que puede estar sometido un ser humano, los cuales permiten cuantificar
diferentes efectos de las vibraciones sobre el individuo:
- Daño en la salud o seguridad de las personas.
- Disminución de la eficiencia en el trabajo.
- Disminución del confort de la persona.
Además se utiliza para evaluar la severidad vibratoria, la aceleración RMS entre 1
y 80 (Hz) medida en tres direcciones mutuamente ortogonales.
Ya que este es un diseño mecánico con fines pedagógicos y teniendo en cuenta
que las frecuencias que se generan al desarrollar cualquier prueba, se encuentran
dentro de un rango muy bajo, por este motivo las normas citadas anteriormente no
rigen el desarrollo del diseño.
2.3 MARCO TEORICO
2.3.1 Vibraciones La vibración es el cambio de posición en el tiempo de una
máquina hacia un lado y otro con respecto a su posición de reposo, en otras
palabras es una forma de energía que se desperdicia.
En la práctica la vibración ocurre como producto de la transmisión normal
de fuerzas cíclicas a través de los mecanismos. Los elementos de una
máquina reaccionan unos contra otros y disipan energía a través de la
estructura en forma de vibración; un buen diseño produciría bajos niveles
de vibración, sin embargo, como las estructuras se desgastan y las partes
se deforman esto genera cambios en sus propiedades dinámicas, y se ve
reflejado en el incremento de las tolerancias.
28
2.3.2 Características de la vibración: El uso de la medición de vibración
como una herramienta requiere la comprensión de amplitud, frecuencia y
fase.
•
Amplitud: La amplitud de vibración puede ser descrita de tres
maneras: desplazamiento, velocidad y aceleración.
- Desplazamiento: Es el concepto que describe la distancia que viaja
un objeto. Como se ve en la figura 3 el peso describe un
desplazamiento pico a pico, es decir que viaja desde su posición limite
superior hasta su posición limite inferior; su representación gráfica en
el tiempo corresponde a una vibración armónica o curva sinusoidal.
Figura 3. Vibración armónica de una masa
Fuente: Documento de Mantenimiento Predictivo Basado en Vibraciones. p6
- Velocidad: Es la rata de cambio del desplazamiento con respecto al
tiempo. Como se ve en la figura 4 la velocidad máxima del objeto se tiene
cuando él pasa por su posición de referencia o posición normal. Cuando el
objeto alcanza sus límites superior e inferior es cero; en medición de
vibraciones, normalmente se usa la velocidad pico.
29
Figura 4. Velocidad de vibración en una masa
Fuente: Documento de Mantenimiento Predictivo Basado en Vibraciones. p6
- Aceleración: Es la rata de cambio de la velocidad con respecto al tiempo.
En la figura 5 se observa que la aceleración no es constante sino que varia
a través del ciclo en forma sinusoidal; cuando el objeto pasa por su posición
de referencia su aceleración es cero, mientras que en los extremos de su
recorrido la aceleración es máxima y es donde ocurre físicamente los
máximos esfuerzo en la estructura.
Figura 5. Aceleración de la vibración de una masa
Fuente: Documento de Mantenimiento Predictivo Basado en Vibraciones. p7
30
Frecuencia: Es el número de ciclos por unidad de tiempo, usualmente descrita
por ciclos por segundos (Hz) o ciclos por minuto (CPM) figura 6, la ecuación
característica de este parámetro es:
fn =
1
2π
k m
(1)
Donde:
f n = Frecuencia natural
k = Constante de rigidez
m = Masa del objeto
El periodo (T) es el tiempo necesario para completar un ciclo de movimiento.
T=
1
= 2π
fn
(m / k )
(2)
Figura 6. Frecuencia de vibración de una masa
Fuente: Documento de Mantenimiento Predictivo Basado en Vibraciones. p12
•
Fase: Se define como la posición de una pieza que vibra en un
instante dado, con relación a un punto fijo o a otra pieza que vibra, en
otras palabras es la manera de comparar un movimiento vibracional
con otro como se ve en la figura 7, en donde se encuentran dos
31
cuerpos vibrando a la misma frecuencia y desplazamiento pero
desfasados 180º9.
Figura 7. Fase de una masa en vibración
Fuente: Documento de Mantenimiento Predictivo Basado en Vibraciones. p13
2.3.3 Método Rayleigh’s Aplicando este método de energía para sistemas con
masas distribuidas, tal como las vigas o resortes donde la masa no es
despreciable, la deflexión del sistema es necesaria para la evaluación de la
energía cinética y potencial. Rayleigh’s mostró que la frecuencia fundamental
de tales sistemas puede ser determinada con gran precisión asumiendo alguna
curva de deflexión razonable... Aunque el método Rayleigh’s es aplicado a
sistemas de más de un grado de libertad sólo la frecuencia fundamental puede
ser encontrada de tal modo. La frecuencia calculada nunca puede ser más
baja que la verdadera frecuencia fundamental del sistema. En un determinado
procedimiento el método de energía es usado para colocar la masa distribuida
en un punto particular donde la rigidez es conocida.
Así en efecto el sistema distribuido es reducido a un sistema equivalente
de un sólo grado de libertad10.
9
Asociación Colombiana de Ingenieros (ACIEM), Mantenimiento Predictivo Basado en Vibraciones.
Bogotá, Colombia Febrero 2005. p5
10
THONMSON, William T., Vibration Theory and Aplications, United States of America 1965. p13
32
El método de Rayleigh’s para vibraciones en vigas cuenta con el siguiente
procedimiento: primero se determina la energía cinética con la ecuación;
TMAX =
1 .2
1
y dm = w 2 ∫ y 2 dm
∫
2
2
(3)
Donde:
y= Amplitud de la curva de la deflexión asumida
m= Masa por unidad de longitud
w= Frecuencia fundamental en rad/seg
Después, la energía potencial es determinada por un trabajo hecho sobre
la viga, el cual es almacenado como energía elástica, así:
U=
1
Mdθ
2∫
(4)
Donde:
M= Momento de flexión
θ = Pendiente de la curva elástica
Entonces la deflexión en vigas es generalmente pequeña, y de la figura 8
se pueden establecer las siguientes ecuaciones:
Figura 8. Curva de deflexión de vigas en voladizo
Fuente: Libro,Vibration Theory and Aplications.p17
33
1 dθ d 2 y
dy
1 M
Y
donde
=
= 2 ; Por teoría de vigas se sabe que
=
dx
R dx dx
R EI
EI es la rigidez de flexión de una viga y R es el radio de curvatura.
Sustituyendo dθ y 1 , en U se obtiene:
R
θ=
2
d2y
1 M2
1
U MAX = ∫
dx = ∫ EI 2 dx
(5)
2 EI
2
dx
Y por ultimo de las ecuaciones de energía potencial y cinética, la
frecuencia fundamental de una viga es determinada por la ecuación11:
2
2
EI d y 2 dx
∫
dx
w2 =
2
∫ y dm
(6)
2.3.4 Fatiga
• Mecanismo de la falla por fatiga
Las fallas por fatiga siempre empiezan en una grieta. La grieta pudiera
haber estado presente en el material desde su manufactura o haberse
presentado a lo largo del tiempo, por causa de las deformaciones cíclicas
cerca de las concentraciones de esfuerzos. Hay tres etapas de fallas por
fatiga, la iniciación de la grieta, la propagación de la grieta y la fractura
súbita causada por el crecimiento inestable de la grieta. La primera etapa
puede ser de corta duración, la segunda etapa implica la mayor parte de
la vida de la pieza y la tercera etapa es instantánea.
• Modelos de falla por fatiga
Actualmente hay en uso tres modelos de falla por fatiga y cada uno de
ellos tiene su sitio y objetivo: el procedimiento de esfuerzo-vida (S-N), el
procedimiento de vida deformación (ε-N) y el procedimiento de mecánica
de fracturas elásticas lineales (LEFM).
- Procedimiento de esfuerzo-vida (S-N)
Se trata del más antiguo de los tres modelos y es el que más se utiliza
para aplicaciones de fatiga de alto ciclaje (HCF), donde se espera que
el conjunto deba durar 103 ciclos de esfuerzo. Funciona mejor cuando
11
Ibid., p17
34
la amplitud de la carga es previsible y consistente durante la vida de
la pieza.
Es un modelo basado en esfuerzo, que busca determinar una
resistencia a la fatiga y/o un límite de resistencia a la fatiga para el
material, de forma que los esfuerzos cíclicos se puedan mantener por
debajo de este nivel y evitar que falle durante el número de ciclos
requeridos.
La meta de diseño es que los esfuerzos y deformaciones por todos
lados se mantengan en la región elástica, sin que ocurra ninguna
fluencia plástica local que pueda iniciar una grieta.
- El procedimiento deformación – vida (ε-N)
Dado que la iniciación de una grieta implica fluencia, un procedimiento
con base en esfuerzo no puede modelar de manera adecuada esta
etapa del proceso. Un modelo basado en deformación da una imagen
razonablemente exacta de la etapa de iniciación de grietas. También
puede tomarse en consideración el daño acumulado por variaciones
en la carga cíclica a lo largo de la vida útil de la pieza, como
sobrecargas que pudieran introducir esfuerzos residuales favorables o
desfavorables en la zona de falla.
Este procedimiento se aplica a menudo a problemas de fatiga de bajo
ciclaje (LCF), de vida finita, donde los esfuerzos cíclicos son lo
bastante elevados para causar fluencia plástica local. Es el uso más
complicado entre los tres modelos, requiriendo solución por
computadora.
- El procedimiento de la mecánica de fracturas elásticas lineales
(LEFM)
La teoría de mecánica de fractura proporciona el mejor modelo de la
etapa de propagación de grietas del proceso. Este método se aplica a
problemas de fatiga de bajo ciclaje (LCF), de vida finita, donde se
sabe que los esfuerzos cíclicos son lo bastante elevados para causar
la formación de grietas y es muy útil para predecir la vida restante de
piezas agrietadas.
35
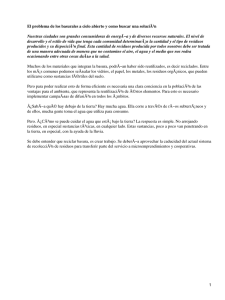
•
Cargas típicas en maquinaria
Las funciones típicas esfuerzo-tiempo experimentadas por maquinaria se
pueden modelar como se observa en la figura 9, mostrada de manera
esquemática como ondas sinusoidales. La figura 9a ilustra el caso
totalmente alternante, en el cual el valor medio es igual a cero. La figura
9b muestra el esfuerzo repetido, en el cual la onda va desde cero hasta
un máximo, con un valor medio igual al componente alterno, y la figura 9c
muestra una versión del caso más general (llamado esfuerzo fluctuante),
en que todos los valores de los componentes son distintos de cero.
Figura 9 Funciones típicas esfuerzo – tiempo
Fuente: Libro, Diseño de máquinas. p356. Figura 6-6
Cualquiera de estas formas de onda se puede caracterizar mediante dos
parámetros, sus componentes medio y alternante, sus valores máximo y
mínimo o la relación entre estos valores12.
• Factor de Seguridad a Fatiga
El factor de seguridad a fatiga (FSF) predice si la estructura fallará debido
a cargas cíclicas. El FSF se calcula primero identificando todos los ciclos
de carga (tensiones medias y tensiones variables) y luego mediante el
diagrama de Goodman se obtienen los ciclos más desfavorables. El
criterio de Goodman proporciona una estimación más conservadora del
FSF, lo que significa que utilizando Goodman se tiende a
sobredimensionar el diseño.
12
NORTON, Robert L., Diseño de máquinas. México, 1999. p343 - 357
36
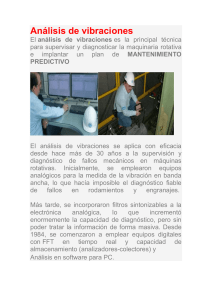
Un ejemplo del criterio de Goodman se tiene en la figura 10 donde el eje
X es la tensión media y el eje Y es la tensión variable (alterna o amplitud
de tensión).
Figura 10. Comparación de los criterios de fatiga
Fuente: http://www.iberisa.com/soporte/fatiga/intro.htm
Comportamiento de los criterios de fatiga existentes, con relación a la línea
de rendimiento del material.
37
3. METODOLOGÍA
El procedimiento que se utiliza para llevar a cabo el buen desarrollo de los
objetivos propuestos, tiene como primera medida la investigación de los bancos de
análisis de vibraciones existentes a nivel mundial, los cuales sirven como base
para proponer alternativas de diseño reales, que se ajusten a los recursos
tecnológicos de la industria colombiana.
Después se analizan parámetros como esfuerzos, deformaciones y fatiga en los
componentes críticos por medio del programa de elementos finitos ANSYS, para
garantizar que el diseño cuente con altos niveles de seguridad.
De esta manera se entrega como resultado final un documento que cumple con
los requerimientos del proyecto.
3.1 ENFOQUE DE LA INVESTIGACIÓN
Este proyecto se enfoca en la investigación empírica-analítica la cual se
fundamenta en dos componentes: “uno de naturaleza formal…, compuesto de
principios que permiten explicar los hechos y que son formulados con ayuda del
lenguaje lógico-matemático, [el cual se desarrollará manualmente] y otro de
naturaleza empírica, que radica en las condiciones de control experimental y
verificación de las formulaciones teóricas, con base en condiciones de experiencia
[mediante un programa de elementos finitos (ANSYS)]”13.
3.2 LÍNEA DE INVESTIGACIÓN
Según las líneas de investigación propuestas por la Universidad de San
Buenaventura este proyecto se sitúa en:
Línea institucional: Tecnologías actuales y sociedad
Sublínea de la facultad: instrumentación y control de procesos
Campo de investigación: Diseño y construcción de aeronaves
13
ED. Bonaventuriana, Caracterización del sistema de Investigación Bonaventuriano, 2005. p78
38
3.3 HIPÓTESIS
El diseño del banco para análisis de vibraciones está conformado por una
estructura rígida, la cual busca simular la unión ala-fuselaje que asegure de
manera eficiente las condiciones de trabajo reales; un mecanismo para la
obtención de un movimiento oscilatorio continuo y un dispositivo que permita la
medición de vibraciones producidas en el elemento a analizar.
Tras el estudio de costos que se realiza, se observa que la construcción de este
banco para fines pedagógicos es viable y puede ser efectuado a corto plazo.
3.4 VARIABLES
3.4.1 Variables independientes
Selección del material
Sujeciones
Dispositivo de medición
Mecanismo generador de vibraciones
3.4.2 Variables dependientes
Diseño sobredimensionado
Dificultad en el maquinado de las partes
Rigidez de la estructura
Condiciones de operación
39
4. DESARROLLO INGENIERIL
4.1 ESTUDIO DE ALTERNATIVAS PARA EL DISEÑO DE LA ESTRUCTURA
BASE
Para la creación del banco se inicia con la concepción de una estructura base, que
cumpla de manera eficiente y práctica, con los parámetros más significativos para
la obtención de un diseño adecuado, los cuales se listan en la tabla 1.
La manera en la que son evaluadas las alternativas propuestas, está determinada
por una calificación de 1 a 10 en donde:
De 1 a 6 Corresponde a la calificación más baja y por ende a la opción que menos
se acomoda a los requerimientos del diseño.
De 6.1 a 8 Corresponde a una calificación que cumple con los requisitos
necesarios pero presenta falencias bajo ciertos parámetros.
De 8.1 a 10 Corresponde a la calificación más adecuada para cumplir los objetivos
del diseño.
Teniendo en cuenta la relevancia de cada una de las características a analizar se
da un porcentaje, que posteriormente se multiplica con la calificación dada a cada
uno y así se determina finalmente cual es la alternativa seleccionada.
SEGURIDAD 13%: Este parámetro es importante ya que el banco tiene fines
didácticos y las personas que lo van a manejar son en su mayoría estudiantes, a
los cuales se les debe garantizar unas condiciones de trabajo ideales.
SIMULACIÓN ALA-FUSELAJE 16%: Este parámetro es de gran relevancia ya que
de ello depende la exactitud de las mediciones en la estructura a analizar.
FACILIDAD DE FABRICACIÓN 12%: Teniendo en cuenta que se deja abierta la
posibilidad para la construcción, se debe garantizar que el fabricante no encuentre
mayor dificultad para llevar a cabo este proceso.
40
FACILIDAD DE OPERACIÓN 9%: El banco no debe requerir de personal
altamente capacitado ni de esfuerzos exagerados, por el contrario debe facilitar el
aprendizaje de los estudiantes.
COSTO DE FABRICACIÓN 8%: Este parámetro depende de los mecanismos a
utilizar, de los materiales en general y de los procesos industriales que se escojan
para su construcción.
COSTO DE OPERACIÓN Y MANTENIMIENTO 8%: Se busca que el banco tenga
un periodo de tiempo largo entre mantenimientos; que se vean afectados la menor
cantidad de elementos posibles y que el número de materiales consumibles para
su operación sea reducido.
DIMENSIONES 10%: Se requiere que el banco se adapte al espacio asignado por
la universidad para su posible construcción.
ASPECTO ATRACTIVO 7%: Se pretende que el diseño seleccionado sea un
modelo que además de su utilidad, cumpla con las expectativas de la universidad
y el alumnado.
RIGIDEZ ESTRUCTURAL 17%: Es de vital importancia para la exactitud de los
análisis que se van a realizar en el banco, que la estructura se adapte
correctamente a los movimientos que se generen y cumpla con un factor de
seguridad elevado.
4.1.1 Alternativas de diseño de la estructura base
ESTRUCTURA BASE 1: Esta consiste en dos perfiles en I de acero, dispuestos
sobre dos rieles que les permite desplazarse lateralmente para adaptarse a
estructuras alares de diferente distancia entre vigas, adicionalmente posee dos
conectores fijos, estos tienen la función de simular la sujeción ala-fuselaje y un
módulo en donde están dispuestos los mecanismos que simulan los modos de
vibración.
41
Figura 11. Estructura base 1
Fuente: Elaborada en este trabajo
1. Perfil en I
2. Conector
3. Rieles para desplazamiento
4. Módulo para disposición del mecanismo
ESTRUCTURA BASE 2: Esta consiste en una placa de concreto unida por medio
de pernos a un perfil en I, tiene adicionalmente dos placas sujetadoras que se
desplazan a lo largo de la longitud del perfil, cada una de estas tiene dos
conectores fijos para sostener el ala y un módulo en donde están dispuestos los
mecanismos que simulan los modos de vibración.
Figura 12. Estructura base 2
Fuente: Elaborada en este trabajo
42
1. Perfil en I
2. Placa de Concreto
3. Placa sujetadora
4. Conectores
5. Módulo para disposición del mecanismo
ESTRUCTURA BASE 3: Es una estructura de acero rectangular sujeta al piso, la
cual en su interior posee una lámina que se ajusta por medio de soldadura; dos
placas, cada una con dos sujetadores fijos para sostener el ala, que se desplazan
a lo largo de la longitud de dicha lámina, y un módulo en donde están dispuestos
los mecanismos que simulan los modos de vibración.
Figura 13. Estructura base 3
Fuente: Elaborada en este trabajo
1. Estructura Rectangular
2. Lámina principal
3. Placa sujetadora
4. Conectores
5. Módulo para disposición del mecanismo
43
Tabla 1. Criterios de selección para la estructura base
ESTRUCTURA
BASE 1
%
ESTRUCTURA
BASE 2
EVALUACIÓN ACUMULADO
ESTRUCTURA
BASE 3
EVALUACIÓN
ACUMULADO
EVALUACIÓN
ACUMULADO
SEGURIDAD
13
6
0,78
7
0,91
9
1,17
SIMULACIÓN
ALA-FUSELAJE
16
5
0,8
7
1,12
8
1,28
FACILIDAD DE
FABRACACIÓN
12
8
0,96
8
0,96
7
0,84
FACILIDAD DE
OPERACIÓN
9
5
0,45
9
0,81
8
0,72
COSTO DE
FABRICACIÓN
8
8
0,64
8
0,64
6
0,48
COSTO DE
OPERACIÓN Y
MANTENIMIENTO
8
7
0,56
7
0,56
7
0,56
DIMENSIONES
10
5
0,5
7
0,7
8
0,8
ASPECTO
ATRACTIVO
7
6
0,42
6
0,42
8
0,56
RIGIDEZ
ESTRUCTURAL
17
7
1,19
7
1,19
9
1,53
TOTAL
100
6,3
7,31
7,94
Fuente: Elaborada en este trabajo
Por los resultados arrojados se escoge la alternativa numero 3 ya que esta es la
que cumple de manera más estricta y satisfactoria con las características de
selección mencionadas en la tabla 1.
4.2 DISEÑO DE LA ESTRUCTURA BASE
4.2.1 Estructura alar Para los análisis que se van a realizar durante todo el
proyecto se escogen tres estructuras alares de aluminio 2024-T3, cuyas
propiedades mecánicas están especificadas en el Anexo A y su configuración es
de 118.43in (3008 mm) de longitud cada una, las cuales están conformadas por
44
seis costillas separadas a una distancia de 24 in (609,6 mm) una de la otra; un
perfil NACA 2412 de cuerda 42in (1066.8 mm) y dos vigas (principal y trasera).
Estas estructuras no tienen piel ya que el software de elementos finitos ANSYS no
cuenta con el número de nodos suficientes para enmallar la estructura con piel,
dificultando la realización de los estudios de deformación, esfuerzo, vida útil y
análisis modal; por esta razón tanto a las costillas como a las vigas se les aumenta
el espesor de 1,6 mm a 5 mm para garantizar el peso total de la estructura como si
esta tuviera piel como se muestra en las siguientes figuras:
Figura 14. Dimensiones estructura alar 1
Fuente: Elaborada en este trabajo
Tabla 2. Configuración de las vigas en la estructura alar 1
VIGA PRINCIPAL
VIGA TRASERA
h1= 138.73 mm
h2= 128.73 mm
b1= 25.4 mm
b2= 20.4 mm
t= 5 mm
h1= 77.7 mm
h2= 67.7 mm
b1= 25.4 mm
b2= 20.4 mm
t= 5mm
Fuente: Elaborada en este trabajo
Figura 15. Dimensiones estructura alar 2
Fuente: Elaborada en este trabajo
45
Tabla 3. Configuración de las vigas en la estructura alar 2
VIGA PRINCIPAL
VIGA TRASERA
h1= 138,7 mm
h2= 128.7 mm
b1= 25.4 mm
b2= 10.2 mm
t= 5 mm
h1= 80.63 mm
h2= 70.63 mm
b1= 25.4 mm
b2= 10.2 mm
t= 5mm
Fuente: Elaborada en este trabajo
Figura 16. Dimensiones estructura alar 3
Fuente: Elaborada en este trabajo
Tabla 4. Configuración de las vigas en la estructura alar 3
VIGA PRINCIPAL
VIGA TRASERA
h1= 78.6 mm
h2= 68.6 mm
b1= 25.4 mm
b2= 20.4 mm
t= 5mm
h1= 138.7 mm
h2= 128.7 mm
b1= 25.4 mm
b2= 20.4 mm
t= 5 mm
Fuente: Elaborada en este trabajo
4.2.2 Determinación de la carga que soporta la estructura alar Para
determinar la carga inicial de diseño se toma la estructura alar 1, la cual se carga
con la misma fuerza en un nodo centrado en el extremo final de cada una de las
46
vigas, hasta el momento en que la deflexión máxima sea menor o igual a 100mm.
Adicionalmente se tiene en cuenta que las estructuras alares están sometidas a
diferentes cargas, por este motivo se establece que el factor de seguridad óptimo
es mayor o igual a 4, mediante la siguiente relación:
FS =
σ Ul
σ Ad
(7);
σ Ul = Esfuerzo ultimo del material (325MPa). Anexo A
σ Ad = Esfuerzo admisible obtenido en ANSYS
El procedimiento se realiza a ensayo y error mediante el software de elementos
finitos ANSYS, obteniendo los siguientes resultados:
•
Resultados estructura cargada con 500 N
Figura 17. Esfuerzo admisible para con carga de 500 N
Fuente: Obtenida en este trabajo
En la figura se observa que el esfuerzo admisible máximo de la estructura alar 1
es de 164.48Mpa, el cual se presenta cerca de la raíz de la viga trasera.
47
Figura 18. Deformación con carga de 500 N
Fuente: Obtenida en este trabajo
Induciendo una carga de 500 N a la estructura alar 1, se tiene una deflexión
máxima de 166.84mm en el borde de salida del perfil que muestra la figura.
FS =
•
345Mpa
= 2.04
164.481Mpa
Resultados estructura cargada con 120 N
Figura 19. Esfuerzo admisible con carga 120 N
Fuente: Obtenida en este trabajo
48
En la figura se observa que el esfuerzo admisible máximo de la estructura alar 1
es de 39.47Mpa, el cual se presenta cerca de la raíz de la viga trasera.
Figura 20. Deformación con carga de 120 N
Fuente: Obtenida en este trabajo
Induciendo una carga de 120 N a la estructura alar 1, se tiene una deflexión
máxima de 40.043 mm en el borde de salida del perfil que muestra la figura.
FS =
•
345Mpa
= 8.73
39.475Mpa
Resultados estructura cargada con 150 N
Figura 21. Esfuerzo admisible con carga de 150 N
Fuente: Obtenida en este trabajo
49
En la figura se observa que el esfuerzo admisible máximo de la estructura alar 1
es de 49.34Mpa, el cual se presenta cerca de la raíz de la viga trasera.
Figura 22. Deformación con carga de 150 N
Fuente: Obtenida en este trabajo
Induciendo una carga de 150 N a la estructura alar 1, se tiene una deflexión
máxima de 50.054 mm en el borde de salida del perfil que muestra la figura.
FS =
•
345Mpa
= 6.99
49.344Mpa
Resultados estructura cargada con 200 N
Figura 23. Esfuerzo admisible con carga de 200 N
Fuente: Obtenida en este trabajo
50
En la figura se observa que el esfuerzo admisible máximo de la estructura alar 1
es de 65.79Mpa, el cual se presenta cerca de la raíz de la viga trasera.
Figura24. Deformación con carga de 200 N
Fuente: Obtenida en este trabajo
Induciendo una carga de 200 N a la estructura alar 1, se tiene una deflexión
máxima de 66.73 mm en el borde de salida del perfil que muestra la figura.
FS =
•
345Mpa
= 5.24
65.792Mpa
Resultados estructura cargada con 250 N
Figura 25. Esfuerzo admisible con carga de 250 N (Pág. 48)
Fuente: Obtenida en este trabajo
51
En la figura se observa que el esfuerzo admisible máximo de la estructura alar 1
es de 82.24Mpa, el cual se presenta cerca de la raíz de la viga trasera.
Figura 26. Deformación con carga de 250 N
Fuente: Obtenida en este trabajo
Induciendo una carga de 250 N a la estructura alar 1, se tiene una deflexión
máxima de 83.42 mm en el borde de salida del perfil que muestra la figura.
FS =
345Mpa
= 4.19
82.241Mpa
Tabla 5. Análisis de resultados para la determinación de la carga de diseño
ENSAYO
1
2
3
4
5
CARGA
120 N
150 N
200 N
250 N
500 N
ESFUERZO DEFORMACION
39,475 Mpa
40,043 mm
49,344 Mpa
50,054mm
65,792 Mpa
66,739 mm
82,241 Mpa
83,423 mm
164,48 Mpa
166,847 mm
Fuente: Elaborada en este trabajo
52
FS
8,73
6,99
5,24
4,19
2,04
Analizando la tabla anterior, el valor de la carga que se debe tomar por factor de
seguridad es de 250N con una deformación máxima de 80mm; adicionalmente se
realiza un análisis por fatiga para determinar el número de ciclos al cual la
estructura alar 1 fallaría, como se muestra en la figura 27.
Figura 27. Análisis por fatiga con carga de 250N (Ansys Workbench)
Fuente: Obtenida en este trabajo
El número de ciclos a los cuales la estructura alar presenta ruptura es de 3.15e+5
ciclos.
Teniendo en cuenta que el número de ciclos presentes en la estructura alar con
una carga de 250N es bajo (3.15e+5 ciclos) como se muestra en la figura 27, se
decide realizar el análisis por fatiga con una carga de 150N para garantizar un
mayor número de ciclos, así:
53
Figura 28. Análisis por fatiga con carga de 150N (Ansys Workbench)
Fuente: Obtenida en este trabajo
La estructura alar 1 presenta vida infinita con una carga de 150N.
Al comparar los análisis por fatiga de las figuras 27 y 28, se determina que la
carga y la deformación óptima de diseño es de 150N y 50mm respectivamente
obteniendo una mayor vida útil en la estructura alar 1.
•
Todos los análisis por fatiga que se realizan en el programa de elementos
finitos ANSYS, tanto para la estructura base como para la estructura alar 1,
cumplen con los siguientes parámetros:
- La carga a la que esta sometida la estructura alar es totalmente alternante como
se ve en la figura 29.
54
- El procedimiento esfuerzo-vida
- El criterio de Goodman, figura 30
Figura 29. Amplitud constante con carga totalmente alternante
Fuente: ANSYS WORKBENCH
Figura 30. Criterio de Goodman
Fuente: ANSYS WORKBENCH
4.2.3 Selección del material para el diseño de la estructura base Los aceros
estructurales están designados por la ASTM (American Society for Testing and
Materials) y presentan características de alto rendimiento para construcciones de
55
ingeniería como: resistencia mecánica, tenacidad a la fractura, resistencia a la
fatiga, formabilidad, mejor comportamiento de la unión soldada, entre otras.14
En la tabla del anexo B se presentan las especificaciones de los aceros A36, A242
y A572 los cuales se preseleccionaron para analizar sus propiedades mecánicas y
elegir el más apropiado.
Los materiales que tienen mayor esfuerzo de fluencia son los que presentan mejor
resistencia estructural, por esta razón se debe seleccionar el A572 o el A242, pero
teniendo en cuenta que estos no son aceros que se encuentran con facilidad en la
industria nacional, se opta por el acero A36 el cual presenta una resistencia
aceptable para la aplicación que se requiere.
4.2.4 Análisis estático La sujeción ala-fuselaje convencional esta conformada
por dos anillos (LUGS), que se encuentran dispuestos tanto en la viga principal
como en la trasera, asegurando una posición fija para la estructura alar.
El análisis estático mostrado a continuación se realiza teniendo en cuenta un sólo
anillo y se asume que la carga en cada uno es la mitad del valor obtenido.
• Viga principal
Figura 31. Diagrama de cuerpo libre viga principal
Fuente: Elaborada en este trabajo
Donde:
14
MANGONON, Pat L. Ciencias de Materiales: Selección y Diseño, México, 2001. p.754-757
56
P= carga determinada (150N)
W= peso de la estructura ( 186.88 N / 2 = 93.443N )
Ax ;Ay = reacciones
L= longitud total (3 m)
Se realiza un análisis estático del sistema
∑ Fx = 0
(8)
Ax= 0
∑ Fy = 0
(9)
Ay – 150N – 93.443N= 0
Ay – 243.44N = 0
Ay = 243.44N
El momento que se genera en la unión ala- fuselaje es el resultado de trasladar las
cargas, como sigue:
∑M
A
=0
(10)
Figura 32. Diagrama de cuerpo libre con momentos viga principal
Fuente: Elaborada en este trabajo
MA- (150N*3m) - (93.443N *1.5m) = 0
MA – 450Nm – 140.16Nm = 0
57
MA–590.16 = 0
MA = 590.16Nm
Los cálculos anteriores son iguales para la viga trasera.
4.2.5 Selección del espesor para la estructura base Se determinan dos
espesores del Acero A36 que se encuentran con facilidad en la industria nacional
y con cada uno de estos, se estudia la influencia que tienen las cargas de la
estructura alar en la estructura base por medio del programa de elementos finitos
ANSYS WORKBENCH obteniendo los siguientes resultados:
•
Acero A 36 ½”
- El esfuerzo máximo al cual la estructura base esta sometida se muestra en la
figura 33, la relación entre este valor y el esfuerzo de fluencia del material con el
cual es construida la estructura base, da como resultado el factor de seguridad de
este componente:
250Mpa
FS =
= 1.9
130.8Mpa
Figura 33. Esfuerzo máximo de la estructura base con espesor de 12.7 mm
Fuente: Obtenida en este trabajo
El esfuerzo máximo se presenta en la lámina principal de la estructura base, con
un valor de 130.8 MPa.
58
- Deformación
Figura 34. Deformación de la estructura Base con espesor de 12.7 mm
Fuente: Obtenida en este trabajo
La deformación máxima se presenta en la parte superior de la lámina principal de
la estructura base, con un valor de 0.000563mm.
- Para saber el número de ciclos a los cuales la estructura falla, se realiza un
diagrama S-N (esfuerzo último vs. Ciclos) de la siguiente manera:
Figura 35. Diagrama S-N
Fuente: Libro, Diseño de máquinas. p384
Donde:
59
SU= Esfuerzo último del material
Sm= 0.9*SU; Resistencia del material a N= 103
Se= 0.5*SU; Resistencia del material para N= Infinito.15
El diagrama S-N en este caso para el acero A36, se obtiene de la siguiente
manera:
SU= 400 MPa
Sm= 0.9*400 MPa = 360 MPa
Se= 0.5*200MPa = 200 MPa
Figura 36. Diagrama S–N acero A36
Fuente: Elaborada en este trabajo
El número de ciclos de la estructura base es de 1*106, lo cual indica que
teóricamente tiene vida infinita, figura 37.
15
NORTON, Robert L., Diseño de máquinas. México, 1999. p383 - 386
60
Figura 37. Vida útil de la estructura Base con espesor de 12.7 mm
Fuente: Obtenida en este trabajo
•
Acero A36 3/8”
Se analiza en ANSYS la estructura base con el espesor de 9.525 mm (3/8”),
teniendo en cuenta los criterios (esfuerzo, deformación, fatiga y factor de
seguridad) que se usaron para el análisis de la estructura con un espesor de 12.7
mm (½”), obteniendo los siguientes resultados:
- El esfuerzo máximo es de 195.9 MPa con un factor de seguridad de:
FS =
250 Mpa
= 1.27
195.9 Mpa
61
Figura 38. Esfuerzo máximo de la estructura base con espesor de 9.525 mm
Fuente: Obtenida en este trabajo
El esfuerzo máximo se presenta en la lámina principal de la estructura base, con
un valor de 195.9MPa.
- Deformación
Figura 39. Deformación de la estructura Base con espesor de 9.525 mm
Fuente: Obtenida en este trabajo
62
La deformación máxima se presenta en la parte superior de la lámina principal de
la estructura base, con un valor de 0.00125mm.
- El número de ciclos antes de la falla es 27680 ciclos como se muestra en la
figura 40.
Figura 40. Vida útil de la estructura Base con espesor de 9.525 mm
Fuente: Obtenida en este trabajo
Comparando los análisis que se realizan para ambos espesores, se establece que
la estructura base debe estar diseñada con acero A36 de ½”, porque presenta
mejores características a la fatiga ya que el número de ciclos es 1e+6, mientras
que para el espesor de 3/8” el número de ciclos es 2.7e+4 y puede presentar fallas
en un menor tiempo.
4.2.6 Cálculo de Soldadura Para llevar a cabo la unión entre las láminas que
conforman la estructura base, se compara la resistencia última y el límite de
fluencia, tanto del electrodo E60XX (anexo C) como del acero A36 previamente
seleccionado (Anexo B), de este modo se observa que los valores del electrodo
son mayores que los del material.
Los tipos de juntas para cada una de las láminas se muestran en los plano 8, 9 y
10 (Anexo N)
63
Para el cálculo de la soldadura se selecciona la lámina que soporta la mayor carga
(lámina principal), plano 2 Anexo N.
Para garantizar la unión se debe encontrar el esfuerzo que actúa en la junta de la
siguiente manera:
σ=
F
h*l
(11)
Donde:
σ
F
h
l
= Esfuerzo de la unión
= Fuerza total soportada por la lámina principal
= Altura del cordón
= longitud del cordón
σ=
466,88 N
= 816.93KPa
0.00317m * 0.18m
Este resultado es menor comparado con la resistencia de fluencia del electrodo
(345 MPa) asegurando que la soldadura soporta las cagas que se presentan en
el banco.
De acuerdo a las características que provee el metal soldante E60XX, se
seleccionan dos electrodos específicos para el trabajo, E6010 y E6013 estos se
deben aplicar de la siguiente manera:
- Primero se suelda con E6010 el cual es un electrodo celulósico con polvo de
hierro de penetración profunda y se usa en trabajos estructurales; luego se suelda
con E6013 el cual tiene una penetración media o baja, pero el metal que se
deposita produce una capa uniforme y lisa dejando cordones de muy buena
presentación. Ver especificaciones (Anexo D)
4.2.7 Selección de pernos de la estructura base
• Pernos para la platina sujetadora: para este cálculo se toman pernos de clase
5.8, con diámetro (d = 12 mm), cabeza hexagonal Para establecer un parámetro
de selección se halla la carga resultante en cada perno y el esfuerzo cortante
máximo de los mismos de la siguiente manera:
64
- La platina sujetadora esta conformada por cuatro pernos como se muestra en la
figura 41.
Figura 41. Platina sujetadora
Fuente: Elaborada en este trabajo
- La Carga cortante primaria por perno es F =
P
n
(12)
Donde:
P= fuerza total soportada por la platina sujetadora
n = número de pernos por platina
Entonces
F=
243.44 N
= 60.68 N
4
- El esfuerzo cortante máximo para cada perno es:
τ=
F
At
(13)
65
Donde:
F = carga cortante primaria por perno
At = Área de esfuerzo de tensión, para serie de paso fino con un diámetro mayor
nominal de 12 mm, según el Anexo E es de 92.1 mm2
Por lo tanto
τ=
60.68 N
= 658.85KPa
9.21e −5 m 2
- la longitud total del perno es igual a:
LT = LTUERCA + L ARANDELA + LSUJECION + LHOLGURA
(14)
LTUERCA= de acuerdo al diámetro del tornillo (12 mm) y teniendo en cuenta que es
hexagonal, este valor es de 10.8 mm según Anexo F.
LARANDELA = 2 mm dimensión estándar.
LSUJECIÒN = 25.4 mm, sumatoria del espesor de las láminas a unir
LHOLGURA = 4 mm
Por consiguiente:
LT= 10.8 + 2 + 25.4 + 4 = 42.2 mm
- Para calcular la parte lisa del perno se determina un L1 que posteriormente se
resta a LT de la siguiente manera:
L1 = d + 6 mm entonces
(15)
L1 = 12 mm + 6 mm= 18 mm
LT - L1= parte lisa, este valor es igual a:
42.2 mm – 18 mm= 24.2 mm.
- Las dimensiones de la cabeza del tornillo para tamaño nominal M12, se
determinan según el Anexo G.
66
Figura 42. Disposición del perno M12
Fuente: Elaborada en este trabajo
• Pernos para la sujeción de la estructura alar dispuestos en la platina sujetadora:
para este cálculo se toman pernos de clase 5.8, con diámetro (d = 10 mm), cabeza
hexagonal.
En cada platina sujetadora se encuentran dos anillos (LUGS), los cuales sirven
para colocar dos pernos que mantendrán la estructura alar en una posición fija
como se muestra en la figura 43
Figura 43. Anillos (LUGS)
Fuente: Elaborada en este trabajo
67
Se calcula la carga resultante en cada perno y el esfuerzo cortante máximo, de la
misma manera que se realizó para los pernos de la platina sujetadora.
- Carga cortante primaria por perno es F =
243.44 N
= 121.72 N
2
- Esfuerzo cortante máximo para cada perno τ =
121.72 N
= 1.98MPa
6.12e −5 m 2
Para evitar una falla por aplastamiento en la unión, se realiza el cálculo de
esfuerzo de aplastamiento de la siguiente manera:
Debido a que los valores exactos de las fuerzas que actúan sobre el perno se
desconocen, se establece que las componentes de estas fuerzas están
distribuidas de manera uniforme sobre el área de contacto del perno.
- Esfuerzo de aplastamiento σ =
F
Ab
(16)
Donde:
F = carga cortante primaria 121.72 N
Ab = t * d; t es el espesor del anillo y d es el diámetro del perno.
Por lo tanto σ =
121.72 N
= 2.43MPa
(0.005m)(0.01m)
- la longitud del tornillo es:
LT = LTUERCA + L ARANDELA + LSUJECION + LHOLGURA
LTUERCA= 8.4 mm ver Anexo F
LARANDELA = 2 mm dimensión estándar.
LSUJECION = 30.4 mm, sumatoria del espesor de las láminas a unir
LHOLGURA = 4 mm
68
Por consiguiente:
LT= 8.4 + 2 + 30.4 + 4 = 44.8 mm
- Para calcular la parte lisa del perno se determina un L1 que posteriormente se
resta a LT de la siguiente manera:
L1 = d + 6 mm entonces
L1 = 10 mm + 6 mm= 16 mm
LT - L1= parte lisa, este valor es igual a:
44.8 mm – 16 mm= 28.8 mm
Figura 44. Disposición del perno M10
Fuente: Elaborada en este trabajo
• Pernos de sujeción entre el soporte inferior de la estructura base y el cimiento de
concreto.
Para garantizar que la estructura base va a estar completamente empotrado al
piso y que este no va a influir en los resultados de las pruebas; se utiliza un
anclaje adhesivo de inyección de referencia HIT HY 150, el cual esta compuesto
de una resina de metacrilato, endurecedor, cemento y agua, posteriormente a esta
mezcla se coloca una varilla roscada HIT-TZ de 5/8” que posee una total
capacidad en tensión para fijaciones en agujeros perforados.
69
Las especificaciones que se deben cumplir para la correcta instalación de este tipo
de anclaje, se muestran en la tabla 6.
Tabla 6. Especificaciones de instalación para la varilla HIT-TZ
Fuente: Catálogo técnico HILTI
Las características que proporciona este tipo de unión son:
-
Resistente a movimientos sísmicos
Excelente resistencia a diferentes tipos de climas
Resistencia a altas temperaturas
Tiene la capacidad de soportar grandes cargas como se muestra en el Anexo H
4.3 ESTUDIO DE ALTERNATIVAS PARA EL DISEÑO DEL MECANISMO
SIMULADOR DE VIBRACIONES
Después de diseñar la estructura base que sostiene el elemento a analizar, se
procede a determinar el mecanismo que simula los modos de vibración (vertical y
rotacional) en la estructura alar como se muestra a continuación:
La manera en la que van a ser evaluadas las alternativas propuestas, está
determinada por una calificación de 1 a 10 como se estableció para la tabla 1.
De acuerdo a los requerimientos del mecanismo de simulación, se escogen las
características relevantes de diseño, a las cuales se les asigna un porcentaje, que
70
posteriormente se multiplica con la calificación dada a cada uno y así se determina
finalmente cual es la alternativa seleccionada.
FACILIDAD DE FABRICACIÓN 10%: teniendo en cuenta los elementos con los
que se cuentan en la industria nacional se debe garantizar que el fabricante no
encuentre mayor dificultad para llevarla a cabo.
SIMULACIÓN DEL MOVIMIENTO ARMÓNICO 30%: el mecanismo debe
proporcionar exactitud en el movimiento durante el tiempo que este se utilice.
FACILIDAD DE OPERACIÓN 15%: el dispositivo no debe requerir de personal
altamente capacitado ni de esfuerzos exagerados.
COSTO DE FABRICACIÓN 10%: se debe tener en cuenta que todos los
elementos utilizados en el mecanismo sean tanto eficientes como efectivos,
generando el menor costo posible.
INFLUENCIA EN EL ELEMENTO A ANALIZAR 20%: el mecanismo no debe
modificar las propiedades físicas (peso, forma, etc.) de la estructura alar.
DIMENSIONES 8%: Se requiere que la dimensión del mecanismo sea
proporcional respecto a la configuración de la estructura base ya diseñada.
REEMPLAZO DE COMPONENTES 7%: el dispositivo debe tener el menor
número posible de piezas reemplazables.
4.3.1 Alternativas de diseño del mecanismo
MECANISMO 1: Este consiste en un disco circular el cual está conectado al motor
mediante un eje de giro, en este disco se encuentra otro eje que está situado
paralelo al eje de giro llamado eje excéntrico y este a su vez esta conectado a una
biela para transformar un movimiento giratorio en movimiento armónico simple con
la ayuda de una sujeción directa a la estructura alar.
71
Figura 45. Mecanismo 1
Fuente: Elaborada en este trabajo
1. Mesa
2. Motor
3. Disco
4. Eje de giro
5. Eje excéntrico
6. Biela
MECANISMO 2: consiste en un conjunto conformado por una leva y un seguidor,
en donde la leva está conectada a un motor, quien le imprime el movimiento
rotativo y el seguidor está acoplado a la estructura alar.
Figura 46. Mecanismo 2
Fuente: http://www.emc.uji.es/d/IngMecDoc/Mecanismos/Levas/LevaRodillo.html
72
Donde:
1. Seguidor
2. Rodillo
3. Leva
Tabla 7. Criterios de selección para el mecanismo simulador de vibraciones
MECANISMO 1
MECANISMO 2
%
EVALUACIÓN
ACUMULADO
EVALUACIÓN
ACUMULADO
FACILIDAD DE FABRICACIÓN
10
9
0.9
6
0.6
SIMULACIÓN DEL MOVIMIENTO
ARMÓNICO
30
10
3
5
1.5
FACILIDAD DE OPERACIÓN
15
8
1.2
8
1.2
COSTO DE FABRICACIÓN
10
8
0.8
6
0.6
INFLUENCIA EN EL ELEMENTO
A ANALIZAR
20
7
1.4
7
1.4
DIMENSIONES
8
8
0.64
8
0.64
REEMPLAZO DE
COMPONENTES
8
9
0.72
7
0.56
TOTAL
100
8.66
6.5
Fuente: Elaborada en este trabajo
De acuerdo a los datos arrojados en la tabla 7 se observa que la alternativa que
más se ajusta a las necesidades es el mecanismo 1, por la exactitud en la
simulación del movimiento deseado.
73
4.4 DISEÑO DEL MECANISMO
Para el diseño del mecanismo se toman unas dimensiones iniciales, se selecciona
un motor de 900 RPM`S y 5HP (cálculo de la potencia en el ANEXO N), teniendo
en cuenta que debe generar un desplazamiento de 5cm a la estructura alar; se
realizan cálculos de fuerzas, velocidades, aceleraciones y análisis por fatiga, para
determinar el factor de seguridad de cada una de las piezas y así comprobar que
las dimensiones asumidas son las indicadas.
Los materiales utilizados para cada elemento se especifican a continuación:
Tabla 8. Selección de materiales del mecanismo
Componente del
mecanismo
Biela
Pasadores A y B
Chaveta
Lamina de unión
ala mecanismo
Material
Descripción
Acero AISI 1020
laminado en
caliente
Acero AISI 1010
laminado en
caliente
Se selecciona este material ya
que cumple con las propiedades
mecánicas
necesarias
para
garantizar un factor de seguridad
mayor a 5, además se utiliza en
elementos que requieren gran
tenacidad y es el más utilizado en
la industria nacional para este
tipo de aplicaciones.
Especial para piezas de pequeño
tamaño y forma sencilla, en las
cuales no sean necesarios altos
valores de resistencia mecánica
Debido a que es un material muy
dúctil
puede
acoplarse
perfectamente a la costilla de la
estructura alar, además transmite
bien las cargas y no deteriora la
estructura a analizar.
Aluminio 1100
Fuente: Libro, Ciencias de Materiales: Selección y Diseño. p754
74
4.4.1 Cálculo de fuerzas que actúan en el mecanismo
Figura 47. Partes principales del mecanismo
Fuente: Elaborada en este trabajo
1. Placa de unión ala-mecanismo
2. Pasador A
3. Biela
4. Motor
5. Chaveta
6. Pasador B
7. Eje del motor
8. Disco
El primer paso para el diseño del mecanismo se basa en el cálculo de fuerzas,
velocidades y aceleraciones que actúan en la biela.
Según la disposición del disco excéntrico y la biela se realizan los cálculos para
0º,90º,180º y 270º
75
Figura 48. Posiciones de la Biela
Fuente: Elaborada en este trabajo
• Análisis para posición 90º
Figura 49. Diagrama de velocidades posición 90º
Fuente: Elaborada en este trabajo
Datos:
Radio entre ejes (r) = 0.05m
Longitud biela (l) = 0.35846m
Ángulo manivela con la vertical θ = 90
RPM = 900
76
Masa de la lámina de unión ala - mecanismo (mp) = 0.687Kg
Masa biela (mb) = 1.172Kg
Radio de giro (k) = 0.10899m
Fuerza aplicada (F’) = 93.58N
- Ángulo biela con la vertical α :
sin θ sin α
r
0.05
=
⇒ α = arcsin sin θ = arcsin
sin(90) = 8.02º
l
r
l
0.35846m
(17)
- Velocidad angular:
w = 900
rev 2πrad 1 min
rad
= 94.25
min 1rev 60 seg
s
(18)
- Velocidad en el pasador B:
υ B = wr = 94.25
rad
m
(0.05m) ⇒ υ B = 4.71
s
s
(19)
- Velocidad en el pasador A:
υ A = υ B + υ A / B ⇒ υ A = υ B + 0 ⇒ υ A = 4 .71
m
s
(20)
- Velocidad angular de la biela
wbiela =
υ A/ B
l
=0
(21)
Figura 50. Diagrama de aceleraciones posición 90º
Fuente: Elaborada en este trabajo
77
Figura 51. Diagrama de fuerzas posición 90º
Fuente: Elaborada en este trabajo
- Aceleración en el pasador B
2
rad
m
a B = (a B ) n + (a B ) t ⇒ a B = (a B ) n + 0 ⇒ a B = rw 2 = (0.05m) 94.25
= 444.13 2 (22)
s
s
- Aceleración normal de A con respecto a B
2
(a A / B ) n = lwbiela
=0
(23)
- Aceleración tangencial de A con respecto a B
m
a
s 2 ⇒ (a ) = 448.52 m
(a A / B ) t = B =
A/ B t
cos α cos(8.02)
s2
444.13
(24)
- Aceleración total de A con respecto a B
a A / B = (a A / B ) n + (a A / B ) t ⇒ a A / B = 0 + (a A / B ) t ⇒ a A / B = 448.52
m
s2
(25)
- Aceleración en el pasador A
a A =a B tan α = 444.13
m
m
(tan(8.02)) ⇒ a A = 62.56 2
2
s
s
- Aceleración angular de la biela
78
(26)
(a )
= A/ B t
l
α biela
m
rad
s2 ⇒ α
=
biela = 1251.23
s2
0.35846m
448.52
(27)
- Placa de unión ala – mecanismo:
Para la reacción A en la dirección de la vertical A x
∑F
x
= m p a A ⇒ Ax − F ' = m p a A − m p g ⇒ Ax = F '+ m p (a A − g )
(28)
m
m
Ax = (93.58 N ) + 0.687 Kg 62.56 2 − 9.81 2
s
s
A x = 129.82 N
- Biela
m
m B a A = 1.172 Kg 62.56 2 = 73.32 N
s
2
m B lwbiela = 0
(29)
(30)
rad
l
0.35846m
m B lα biela = m B α biela = 1.172 Kg
1251.23 2 = 262.83N
2
s
2
(31)
2
rad
Iα biela = m B k α biela = 1.172 Kg (0.10899m) 2 1251.23 2 = 17.42 N
s
(32)
Para la reacción en A en dirección perpendicular a la vertical AY
∑M
B
Ay =
= Iαbiela + mB ad ⇒ Ay l cosα − Axl sinα = Iαbiela + mB aA I sinα − mB gl sinα −mB lαbiela
Iα biela + (m B a A )l sin α − m B g l sin α − (m B lα biela )l + ( Ax )l sin α
l cos α
Donde:
__
l = l/2
__
I=
Momento de inercia de la biela
mB =Masa de la biela
aA = Aceleración en A
79
(33)
m 0.35846m
0.35846m
(17.42 N ) + (73.32)
sin(8.02º ) − 1.172 Kg 9.81 2
sin(8.02º )
2
2
s
Ay =
(0.35846m) cos(8.02º )
0.35846
− (262.83N
+ (129.82 N )(0.35846m) sin(8.02º )
2
AY = - 60.995 N esta reacción va en sentido contrario al ilustrado.
- Para la reacción en B en dirección del eje de la biela BN:
∑F
n
= ma n ⇒ B N − Ax cos α − Ay sin α = m B a A cos α − m B g cos α
(34)
B N = Ax cos α + Ay sin α + m B a A cos α − m B g cos α = Ax cos α + Ay sin α + m B cos α (a A − g )
m
m
B N = 129.82 N cos(8.02º ) + ( −60.995 N ) sin(8.02º ) + 1.17 Kg (cos(8.02º )) 62.56 2 − 9.81 2
s
s
BN = 181.26 N
Para reacción en B en dirección perpendicular al eje de la biela (BT)
∑F
t
= ma t ⇒ BT + Ax sin α − Ay cos α = m B lα biela − m Bα A sin α − m B g sin α
(35)
BT = m B lα biela − m B a A sin α − m B g sin α + Ay cos α − Ax sin α
BT = m B (lα biela − a A sin α − g sin α ) + Ay cos α − Ax sin α
0.35846m
rad
m
m
BT = 1.17 Kg
1251.23 2 − 62.56 2 sin(8.02º ) − 9.81 2 sin(8.02º ) +
2
s
s
s
(−60.995 N ) cos(8.02º ) − (129.82 N ) sin(8.02º )
BT = 172.49 N
- Reacción total en A
A=
Ax2 + Ay2 = (129.82 N ) 2 + (−60.995 N ) 2
A = 143.44 N
80
(36)
- Reacción total en B
B = B N2 + BT2 = (181.26 N ) 2 + (−172.49 N ) 2
(37)
B = 250.22 N
De la misma manera se realizan los cálculos para las posiciones 0º, 180º y 270º;
los resultados se resumen en las tablas 9,10 y 11 respectivamente.
• Análisis para posición 0º
Datos:
Radio entre ejes (r) = 0.05m
Longitud biela (l) = 0.35846m
Ángulo manivela con la vertical θ = 0º
RPM = 900
Masa de la lámina de unión ala - mecanismo (mp) = 0.687Kg
Masa biela (mb) = 1.172Kg
Radio de giro (k) = 0.10899m
Fuerza aplicada (F’) = 300N
Figura 52. Diagrama de velocidades posición 0º
Fuente: Elaborada en este trabajo
Figura 53. Diagrama de aceleraciones posición 0º
Fuente: Elaborada en este trabajo
81
Figura 54. Diagrama de fuerzas posición 0º
Fuente: Elaborada en este trabajo
Tabla 9. Resultados análisis para posición 0º
SÍMBOLO
Α
W
vB
vA
wbiela
aB
(aA/B)n
(aA/B)t
aA/B
aA
αbiela
Ax
Ay
BN
BT
A
B
NOMBRE
Ángulo de la biela con la vertical
Velocidad Angular
Velocidad en el pasador B
Velocidad en el pasador A
Velocidad Angular de la biela
Aceleración en el pasador B
Aceleración normal de A respecto a B
Aceleración tangencial de A respecto a B
Aceleración total de A respecto a B
Aceleración en el pasador A
Aceleración angular de la biela
PLACA UNIÓN ALA-MECANISMO Reacción
A en dirección vertical Ax
BIELA Reacción A en dirección
perpendicular a la vertical Ay
Reacción B en dirección del eje de la biela
Reacción B en dirección perpendicular al eje
de la biela
Reacción total en A
Reacción total en B
Fuente: Elaborada en este trabajo
82
VALOR
0º
94.25 rad/s
4.71m/s
4.71m/s
13.15rad/s
444.13m/s2
61.95 m/s2
0
61.95 m/s2
506.08 m/s2
0
- 54.416N
0
- 622.72
0
54.416N
622.72N
• Análisis para posición 180º
Datos:
Radio entre ejes (r) = 0.05m
Longitud biela (l) = 0.35846m
Ángulo manivela con la vertical θ = 180º
RPM = 900
Masa de la lámina de unión ala - mecanismo (mp) = 0.687Kg
Masa biela (mb) = 1.172Kg
Radio de giro (k) = 0.10899m
Fuerza aplicada (F’) = 300N
Figura 55. Diagrama de velocidades posición 180º
Fuente: Elaborada en este trabajo
Figura 56. Diagrama de aceleraciones posición 180º
Fuente: Elaborada en este trabajo
Figura 57. Diagrama de fuerzas posición 180º
Fuente: Elaborada en este trabajo
83
Tabla 10. Resultados análisis para posición 180º
SÍMBOLO
α
w
vB
vA
wbiela
aB
(aA/B)n
(aA/B)t
aA/B
aA
αbiela
Ax
Ay
BN
BT
A
B
NOMBRE
Ángulo de la biela con la vertical
Velocidad Angular
VALOR
0º
94.25 rad/s
Velocidad en el pasador B
Velocidad en el pasador A
- 4.71m/s
Velocidad Angular de la biela
13.15rad/s
Aceleración en el pasador B
Aceleración normal de A respecto a B
444.13m/s2
4.71m/s
61.95 m/s2
Aceleración tangencial de A respecto a B
Aceleración total de A respecto a B
61.95 m/s2
Aceleración en el pasador A
382.18 m/s2
Aceleración angular de la biela
PLACA UNIÓN ALA-MECANISMO Reacción A
en dirección vertical Ax
BIELA Reacción A en dirección perpendicular a
la vertical Ay
Reacción B en dirección del eje de la biela
0
0
44.18N
0
- 428.56N
Reacción B en dirección perpendicular al eje de
la biela
Reacción total en A
44.18N
Reacción total en B
428.56N
Fuente: Elaborada en este trabajo
• Análisis para posición 270º
Datos:
Radio entre ejes (r) = 0.05mLongitud biela (l) = 0.35846m
Ángulo manivela con la vertical θ = 270º
RPM = 900
Masa de la lámina de unión ala - mecanismo (mp) = 0.687Kg
Masa biela (mb) = 1.172Kg
Radio de giro (k) = 0.10899m
Fuerza aplicada (F’) = 93.5N
84
0
Figura 58. Diagrama de velocidades posición 270º
Fuente: Elaborada en este trabajo
Figura 59. Diagrama de aceleraciones posición 270º
Fuente: Elaborada en este trabajo
Figura 60. Diagrama de fuerzas posición 270º
Fuente: Elaborada en este trabajo
85
Tabla 11. Resultados análisis para posición 270 º
SÍMBOLO
NOMBRE
VALOR
α
Ángulo de la biela con la vertical
w
vB
Velocidad Angular
Velocidad en el pasador B
Velocidad en el pasador A
94.25 rad/s
4.71m/s
wbiela
aB
(aA/B)n
Velocidad Angular de la biela
Aceleración en el pasador B
Aceleración normal de A respecto a B
0 rad/s
444.13m/s2
61.95 m/s2
(aA/B)t
aA/B
aA
Aceleración tangencial de A respecto a B
Aceleración total de A respecto a B
Aceleración en el pasador A
αbiela
Aceleración angular de la biela
448.52 m/s2
448.52 m/s2
62.56 m/s2
1251.23
rad/s2
vA
8.02º
4.71m/s
Ax
PLACA
UNION
ALA-MECANISMO
Reacción A en dirección vertical Ax
129.82N
Ay
BIELA Reacción A en
perpendicular a la vertical Ay
159.15 N
BN
Reacción B en dirección del eje de la
biela
167.57 N
BT
Reacción B en dirección perpendicular al
eje de la biela
-78.505 N
A
Reacción total en A
205.38N
B
Reacción total en B
185.05N
dirección
Fuente: Elaborada en este trabajo
4.4.2 Cálculos por fatiga del mecanismo Estos cálculos se realizan para los
elementos críticos del mecanismo de la siguiente manera:
•
BIELA
Material: ACERO AISI 1020, laminado en caliente
86
Esfuerzo último a tensión:
S ut = 379Mpa
Esfuerzo a tensión:
σ=
P
A
(38)
Donde:
P= Es la fuerza resultante en dirección del eje de la biela
A= Es el área transversal perpendicular al eje de la biela
σ0 =
622.72 N + 54.42 N
= 1693KPa
4e − 4 m
(39)
σ 90 =
181.3N + 129.8 N cos 8.02 − 61N sin 8.02
= 753.3KPa
4e − 4 m
(40)
σ 180 =
428.6 N + 44.2 N
= 961KPa
4e − 4 m
(41)
σ 270 =
167.6 N + 129.8 N cos 8.02 − 159.15 N sin 8.02
= 685KPa
4e − 4 m
(42)
Por lo tanto:
σ max = 1693KPa
(43)
σ min = 685 KPa
(44)
- Esfuerzo alternante nominal:
σ anom =
σ mnom =
σ max − σ min
2
σ max + σ min
2
=
1693KPa − 685 Pa
= 504 Pa
2
(45)
=
1693KPa + 685Pa
= 1189 Pa
2
(46)
- Concentración de esfuerzos geométricos:
87
Según el Anexo I el valor del esfuerzo geométrico Kt, para una barra plana con
perforación transversal a tensión axial es:
K t = 2.71 para d/w= 0.5
(47)
Teniendo en cuenta que el esfuerzo último de tensión del acero AISI 1020 es de
379 MPa (55 ksi) se toma la constante de Neuber según el anexo J.
a = 0.118 para S ut = 55ksi
Entonces, la sensibilidad a la muesca del material es igual a:
1
q=
1+
a
r
=
1+
1
0.118
= 0.842
(48)
10 / 25.4
Donde:
r = Es el radio de perforación de la biela en pulgadas (in).
Para determinar el factor de concentración de esfuerzo a la fatiga dinámico (Kf), se
utiliza el esfuerzo teórico estático (Kt), como se muestra a continuación:
K f = 1 + q( K t − 1) = 1 + 0.842(2.71 − 1) = 1.985
(49)
- Esfuerzo alternante:
σ a = K f σ anom = 1.985(504 KPa) = 1000.5KPa
(50)
- Esfuerzo medio:
K fm = K f porque K f σ max ≤ S y
3.36MPa ≤ 207 MPa
σ m = K fmσ mnom = 1.985(1189KPa) = 2360Pa
(51)
(52)
Esfuerzos por flexión:
σ=
Mc
I
(53)
88
Figura 61. Sección transversal de la biela
Fuente: Elaborada en este trabajo
c = 20mm = 20e −3 m
b = 10mm = 10e −3 m
h = 40mm = 40e −3 m
I=
bh 3 10e −3 m(40e −3 m) 3
=
= 5.33e −8 m 4
12
12
(54)
- Para 90º:
σ=
Mc (−31.55 Nm)(20e −3 m)
=
= −11.84MPa
I
5.33e −8 m 4
Figura 62. Diagrama de cortante de la biela para 90º
Fuente: Elaborada en este trabajo
89
(55)
Figura 63. Diagrama de momento de la biela para 90º
Fuente: Elaborada en este trabajo
- Para 270º:
σ=
Mc (31.55 Nm)(20e −3 m)
=
= 11.84MPa
I
5.33 −8 m 4
(56)
Figura 64. Diagrama de cortante de la biela para 270º
Fuente: Elaborada en este trabajo
90
Figura 65. Diagrama de momento de la biela para 270º
Fuente: Elaborada en este trabajo
σ anom =
σ max − σ min
2
=
11.84 MPa − (−11.84 MPa)
= 11.84MPa
2
(57)
σ mnom = 0
(58)
- Concentración de esfuerzos geométrico:
Según el Anexo K, el valor del esfuerzo geométrico Kt, para una barra plana con
perforación transversal a flexión es:
K t = 1.45 para d / w = 0.5 y d / h = 2
(59)
a = 0.118 para S ut = 55ksi
q = 0.842
Entonces el factor de concentración de esfuerzo a la tensión dinámico (Kf) es:
K f = 1 + q ( K t − 1) = 1 + 0.842(1.45 − 1) = 1.38
(60)
- Esfuerzo alternante:
σ a = K f σ anom = 1.38(11.84MPa) = 16.4 MPa
(61)
- Esfuerzo alternante total:
σ ' a = σ atension + σ aflexion = 1MPa + 16.4MPa = 17.4MPa
91
(62)
- Esfuerzo medio total:
σ ' m = 2.36MPa
(63)
Límite a la fatiga:
El límite de resistencia a la fatiga del material es:
S ' e = 0.5S ut = 0.5(379MPa) = 189.5MPa
(64)
El límite de resistencia a la fatiga corregido, consiste en la multiplicación entre una
serie de factores de reducción y la estimación teórica como se muestra a
continuación:
S e = C c arg a xC tam xCsup xC temp xC conf xS ' e
(65)
Donde:
C c arg a = 0.7 ; Es el factor de carga para una carga combinada
C tam = 1.189d −0.097 = 0.8788 ; Es el factor de tamaño, para el cual se debe tomar el
diámetro equivalente que es:
d=
(b * h) * 4
π
= 22.57mm
(66)
C sup = AS utb = 2.7(55) −0.2615 = 0.947 ; Es el factor de superficie, el cual para un
acabado superficial con maquinado esta determinado según el Anexo L.
C tem = 1 ; Es el factor de temperatura cuando T≤450ºC
C conf = 0.814 ; Es el factor de confiabilidad (99%)
Entonces:
S e = 0.7(0.8788)(0.947)(1)(0.814) x189.5MPa = 89.86MPa
Finalmente el factor de seguridad para este elemento es de:
92
S e S ut
(89.86)(379)
=
=5
σ ' a S ut + σ ' m S e (17.4)(379) + (2.36)(89.86)
Nf =
(67)
Nf = 5
•
PASADORES A y B
Debido a que estos pasadores son del mismo diámetro el cálculo tiene el mismo
factor de seguridad.
Material: ACERO AISI 1020, laminado en caliente
Diámetro= 20mm mostrados en la figura 47. Numerales 2 y 6
Esfuerzo último a tensión:
S ut = 379MPa
Esfuerzo límite al cortante:
S us = 189.5MPa
F0= Ax = 54.4 N
F90= Ax = 129.8 N
F180= Ax = 44.2 N
F270= Ax = 129.8 N
Fmáx= Ax = 54.4 N
Fmín= Ax = 129.8 N
- Fuerza alternante:
Fa =
Fmax − Fmin 54.4 N − (−129.8 N )
=
= 92.1N
2
2
(68)
- Fuerza media:
Fm =
Fmax − Fmin 54.4 N + (−129.8 N )
=
= −37.69 N
2
2
- Esfuerzo medio:
93
(69)
τm =
Fm
4 Fm
2F
2(37.69 N )
=
= m2 =
= 0.96 MPa
2
2 A 2πd
πd
π (0.005m) 2
(70)
- Esfuerzo alternante:
τa =
2 Fa
2(92.1N )
=
= 2.34 MPa
2
πd
π (0.005m) 2
(71)
- Esfuerzos equivalentes:
σ ' a = 3τ a2 = 3(2.34 MPa) 2 = 4.1MPa
(72)
σ ' m = 3τ m2 = 3(0.96 MPa) 2 = 1.7 MPa
(73)
- Límite de resistencia a la fatiga:
S ' es = 0.5S us = 0.5(189.5MPa) = 94.75MPa
(74)
S es = C c arg a xCtam xC sup xCtemp xC conf xS ' e
(75)
C c arg a = 0.7 ; Para carga axial
C tam = 1 ; Para diámetro menor a 8mm
C sup = AS utb = 2.7(55) −0.265 = 0.9336 ; Para maquinado
C tem = 1
C conf = 0.814 ; Para 99% de confiabilidad
Entonces:
S es = 0.7(1)(0.9336)(1)(0.814) x94.75MPa = 50.4 MPa
Finalmente el factor de seguridad para este elemento es de:
Nf =
S es S us
(50.4 MPa)(189.5MPa)
=
σ ' a S us + σ ' m S es (4.1MPa)(189.5MPa) + (1.7 MPa)(50.4MPa)
Nf = 11
94
(76)
• CHAVETA
El material que se utiliza para el diseño es: Acero 1010 laminado en caliente y sus
propiedades son:
S ut = 324 MPa
S y = 179MPa
F90 = B x = B N cos 8.02 − BT sin 8.02 = 155.5 N
(77)
Torque para el conjunto eje, Chaveta y del pasador B
T = B x r = 155.5 Nx0.05m = 7.775 Nm
(78)
- Fuerza en la chaveta
P=
T 7.77 Nm
=
= 277.5 N
d
0.028
(79)
- Fuerza alternante
Fa = P = 277.5 N
(80)
- Fuerza media
Fm = Fa = 277.5 N
(81)
Esfuerzo cortante
τa =
Fa
277.5 N
=
= 3.5MPa
Acorte (0.008m)(0.01m)
(82)
- Esfuerzo equivalente
σ ' a = 3τ a2 = 3(3.5MPa) 2 = 6.1MPa = σ ' m
(83)
Limite de resistencia a la fatiga
S ' e = 0.5S ut = 0.5(324MPa) = 162MPa
(84)
95
S e = C c arg a xC tam xC sup xC temp xC conf xS ' e
(85)
C c arg a = 0.7 Para carga combinada
C tam = 1.189d −0.097 = 0.86 Diámetro de 28 mm
C sup = AS utb = 2.7(47) −0.265 = 0.973 Para maquinado
C tem = 1
C conf = 0.814 Para 99%
Por lo tanto:
S e = 0.7(0.86)(0.973)(1)(0.814) x162 MPa = 77.2 MPa
Factor de seguridad
Nf =
1
σ 'a
Se
+
σ 'm
=
S ut
1
(86)
6.1MPa
6.1MPa
+
77.2 MPa 324 MPa
Nf = 10.2
Esfuerzo de aplastamiento
σ max =
Fm + Fa
(277.5) + (277.5 N )
=
(0.005)(0.01)
(0.004m)(0.01)
(87)
σ màx = 13.9MPa
Factor de seguridad
Nf =
Sy
σ max
=
179 MPa
13.9 MPa
(88)
Nf = 12.9
• LAMINA DE UNIÓN ALA-MECANISMO
Material: Aluminio 1100 (recocido en hoja): S y = 34MPa
F0= F - Ax = 300 N – 54.4 N = 245.6N
96
F90= Ax – F’ = 129.8 N – 93.6 N = 36.2 N
F180= F + Ax = 300 N + 44.2 N = 344.2 N
F270= F’ - Ax = 93.6 N - 129.8 N = -36.2 N
Este elemento siempre estará a compresión por lo que se trata como un análisis
estático tomando el esfuerzo máximo para cálculos:
- Fuerza alternarte:
Fa =
Fmax − Fmin 344.2 N − 36.2 N
=
= 154 N
2
2
(89)
- Fuerza media:
Fm =
Fmax − Fmin 344.2 N + 36.2 N
=
= 190.2 N
2
2
(90)
Esfuerzo máximo de aplastamiento:
σ max =
Fm + Fa
Fm + Fa
(154 N ) + (190.2 N )
=
=
ld
(0.008m)(0.02m) (0.008m)(0.002m)
(91)
σ max = 2.15MPa
Factor de seguridad:
Nf =
Sy
σ max
=
34 MPa
2.15MPa
(92)
Nf = 15.8
4.4.3 Selección de pernos del mecanismo Teniendo en cuenta el estudio de
pernos que se realizó anteriormente para la estructura base, se seleccionan
pernos con las mismas propiedades mecánicas para los requerimientos del
mecanismo, teniendo en cuenta que la resistencia última a la tensión para pernos
de clase 5.8 soporta perfectamente las cargas en el acople mesa-motor y en la
lámina de unión ala-mecanismo.
97
Figura 66. Disposición del perno M5 para lámina de unión ala- mecanismo
Fuente: Elaborada en este trabajo
Figura 67. Disposición del perno M6 para acople mesa – motor
Fuente: Elaborada en este trabajo
4.4.4 Sistema de sujeción ala-mecanismo para estructuras alares con piel Si
la estructura alar que se va a estudiar en el banco esta cubierta con piel, se
propone un dispositivo de sujeción ideal para dichas estructuras (Figura 68). Este
tipo de sujeción requiere de una protección adicional de caucho para prevenir que
el elemento a analizar sufra deformaciones en el momento de su adaptación al
mecanismo.
98
Figura 68. Sujeción para estructuras alares con piel
Fuente: Elaborada en este trabajo
1. Soporte
2. Pernos de sujeción
3. Pasador A
4. Biela
4.5 DISPOSITIVO DE MEDICIÓN DE LAS CARACTERÍSTICAS DE VIBRACIÓN
En el transcurso del proyecto se adquirieron conocimientos acerca del dispositivo
de medición VIBSCANNER, el cual resulta ser el elemento más adecuado para
medir vibraciones tanto en estructuras alares como cualquier otro tipo de
estructura o máquina.
El VIBSCANNER es un sistema portátil que es ideal para la supervisión periódica
de cualquier componente, evitando una falla súbita.
Los principales componentes de este son:
99
Figura 69. Partes del VIBSCANNER
Fuente: www.pruftechnik.com
Donde:
1. Sensores e interfaces: mide directamente los parámetros más importantes.
2. Despliegue de alarmas: esta conformado por cuatro LED’S que de acuerdo al
color indican lo siguiente;
- Verde = preadvertencia
- Amarillo = advertencia
- Rojo = alarma
- Azul = todo esta bien.
3. Despliegue gráfico retroalimentado: símbolos de medición claros.
4. Navegador joystick.
5. Batería: esta es recargable de cambio rápido en la parte inferior del
instrumento garantizando ocho horas de operación.
El VIBSCANNER se complementa con un software, en donde se descargan los
datos almacenados en el dispositivo y de esta manera se realiza su respectivo
análisis por medio de gráficas que relacionan velocidad, desplazamiento y
aceleración vs. Frecuencia natural.
100
A continuación se muestran algunos ejemplos de las gráficas que arroja el
Software OMNITREND, realizadas a un rodamiento de bola de carga media (SKF6202) con un eje interno de 12.7mm de diámetro.
Figura 70. Desplazamiento vs. Frecuencia natural
Fuente: Software OMNITREND
Figura 71. Velocidad vs. Frecuencia natural
Fuente: Software OMNITREND
101
Figura 72. Aceleración vs. Frecuencia natural
Fuente: Software OMNITREND
4.6 ESTUDIO ANALÌTICO
Por facilidad de cálculos se tomo un sólo elemento para el desarrollo analítico,
siendo este la viga principal en C, a la cual se le determinará la frecuencia natural
y deflexión total en el extremo de la viga, así:
4.6.1 Frecuencia Natural viga en C Para calcular la frecuencia natural o
fundamental se utiliza el siguiente procedimiento:
La viga esta empotrada como se ve en la siguiente figura:
Figura 73. Disposición de la viga
Fuente: Elaborada en este trabajo
102
Se asume que la amplitud de la viga en cualquier punto x esta dada por la curva
estática de deflexión de una viga con una carga concentrada en el extremo, en
otras palabras:
2
3
1 x x
y = y 0 3 −
2 l l
(93)
Donde y0 = Pl 3 3EI y k = P y 0 = 3EI l 3 es la amplitud o deflexión y la rigidez
en el extremo de la viga respectivamente; por tanto la energía potencial es igual al
trabajo hecho:
U max =
1
3EI
k * y 02 = 3 y 02
2
2l
(94)
La energía cinética es:
TMAX
w
=
2g
l
w wy 0
(
)
wy
dx
=
∫0
2g 2
2
2
x 2 x 3
1 33wl 2 2
w y 0
3
−
dx
=
∫0 l l
2
140
g
2 l
(95)
Uniendo las ecuaciones tanto de la energía cinética como de la potencial, la
frecuencia fundamental en radianes por segundo es:
ω1 = 3.515 gEI wl 4
(96)
Entonces con esta ecuación se calcula la frecuencia fundamental para la viga con
perfil en C:
E = 73.1 Gpa
Iy = 3.41*10-8 m4
L=3m
w = 2.495467 Kg / l
g = 9.8 m/s2
Por tanto:
103
ω1 = 3.515 (9.8m / s 2 )(73.1Gpa)(3.41 *10−8 m 4 ) (2.4954kg / l )(3) 4
ω1 = 6.15 Hz
Al calcular la frecuencia natural por medio del programa de elementos finitos
ANSYS el valor es:
ω1 = 0.0617 Hz
Figura 74. Frecuencia natural viga en C
Fuente: Obtenida en este trabajo
4.6.2 Deformación viga en C Para determinar la deflexión se realiza el siguiente
procedimiento:
La ecuación pertinente para establecer la deflexión en una viga de sección
transversal uniforme es:
(PL )
y=
3
(97)
3EI
104
La deflexión establecida fue de 0.08m y para generarla se necesita una carga P;
el momento de inercia de la sección transversal C se calculó de la siguiente
manera:
Figura 75. Sección transversal de la viga de perfil en C
Fuente: Elaborada en este trabajo
Tabla 12. Cálculo del momento de inercia de la viga principal en C
Fuente: Elaborada en este trabajo
Donde:
El Ix= Icx +Ay2
El Iy= Icy+Ax2
El Icx= (1/12) b*h3
El Icy= (1/12) b3*h
(98)
(99)
(100)
(101)
Inercia Total Ix m4=4.45E-6
Inercia Total Iy m4= 3.41E-08
(102)
(103)
Teniendo en cuenta que el material es Aluminio 2024-T3 y desarrollando la
ecuación 97
E=
73.1Gpa
105
L=
3m
(y) = 0.08 m
y=
(PL )
3
3EI
P = -22,1521 N
Figura 76. Deformación de la viga en C
Fuente: Obtenida en este trabajo
Al comparar los datos obtenidos, se ve que en la deflexión, tanto el resultado
analítico como experimental es el mismo ya que el análisis para un elemento en
este caso la viga en C de sección uniforme es simple y no requiere un desarrollo
complicado; pero para llevar a cabo un estudio de vibraciones en cualquier
componente, se recomienda realizar éste en un programa de elementos finitos
como ANSYS, puesto que manualmente no se logra la exactitud necesaria como
se observa en los resultados mostrados anteriormente, la diferencia es muy
grande para tenerlo en cuenta en cualquier diseño ingenieril.
106
4.7 ANALISIS MODAL
Para conocer las frecuencias a las cuales
las tres estructuras alares
seleccionadas pueden presentar resonancia se realiza el análisis modal
correspondiente, en el programa de elementos finitos ANSYS.
Se obtienen los siguientes resultados:
4.7.1 Estructura alar 1
Figura 77. Estructura alar 1
Fuente: Elaborada en este trabajo
Tabla 13. Frecuencias de la estructura alar 1
Modo
1
2
3
4
5
Frecuencia Hz
0.8769E-01
0.23647
0.37487
0.37610
0.92950
Frecuencia RPM
5.2614
14.1882
22.4922
22.566
55.77
Fuente: Elaborada en este trabajo
Se deduce de la tabla 13 que la frecuencia de resonancia para el primer modo es
menor comparado con la frecuencia para el quinto modo, ya que la complejidad
del movimiento es mayor a medida que el modo de vibración incrementa.
107
A continuación se nuestra las gráficas correspondientes a cada modo de vibración.
Figura 78. Primer modo de vibración de la estructura alar 1
Fuente: Obtenida en este trabajo
Este modo presenta un movimiento horizontal alrededor del eje Z, sin presentar
cambios en la geometría de las vigas.
Figura 79. Segundo modo de vibración de la estructura alar 1
Fuente: Obtenida en este trabajo
El movimiento comienza en una posición de reposo, gira alrededor del eje Y hacia
al lado positivo del eje Z y regresa a su posición inicial.
108
Figura 80. Tercer modo de vibración de la estructura alar 1
Fuente: Obtenida en este trabajo
El movimiento comienza en una posición de reposo, gira alrededor del eje Y hacia
al lado negativo del eje Z y regresa a su posición inicial.
Figura 81. Cuarto modo de vibración de la estructura alar 1
Fuente: Obtenida en este trabajo
Describe un movimiento horizontal en el eje X, presentando un pandeo
significativo en las vigas
109
Figura 82. Quinto modo de vibración de la estructura alar 1
Fuente: Obtenida en este trabajo
Describe un movimiento irregular en el plano X-Z, presentado una deformación
total tanto en las vigas como en las costillas de la estructura.
4.7.2 Estructura alar 2
Figura 83. Estructura alar 2
Fuente: Elaborada en este trabajo
110
Tabla 14. Frecuencias de la estructura alar 2
Modo
Frecuencia Hz
Frecuencia RPM
1
0.75335E-01
4.5201
2
3
0.24847
0.29134
14.9082
17.4804
4
0.36969
22.1814
5
0.67001
40.2006
Fuente: Elaborada en este trabajo
Al comparar la tabla 13 con la tabla 14 se observa que la estructura alar 2 entra en
resonancia a más bajas RPM’S debido a la configuración de las vigas.
A continuación se muestran las gráficas correspondientes a cada modo de
vibración
Figura 84. Primer modo de vibración de la estructura alar 2
Fuente: Obtenida en este trabajo
111
Este modo presenta un movimiento horizontal alrededor del eje Z, sin presentar
cambios en la geometría de las vigas.
Figura 85. Segundo modo de vibración de la estructura alar 2
Fuente: Obtenida en este trabajo
El movimiento comienza en una posición de reposo, gira alrededor del eje Y hacia
al lado positivo del eje Z y regresa a su posición inicial.
Figura 86. Tercer modo de vibración de la estructura alar 2
Fuente: Obtenida en este trabajo
112
Describe un movimiento horizontal en el eje X, presentando un pandeo
significativo en las vigas.
Figura 87. Cuarto modo de vibración de la estructura alar 2
Fuente: Obtenida en este trabajo
El movimiento comienza en una posición de reposo, gira alrededor del eje Y hacia
al lado negativo del eje Z y regresa a su posición inicial.
Figura 88. Quinto modo de vibración de la estructura alar 2
Fuente: Obtenida en este trabajo
113
Describe un movimiento irregular en el plano X-Z, presentado una deformación
total tanto en las vigas como en las costillas de la estructura.
4.7.3 Estructura alar 3
Figura 89. Estructura alar 3
Fuente: Elaborada en este trabajo
Tabla 15. Frecuencias de la estructura alar 3
Modo
Frecuencia Hz
Frecuencia RPM
1
0.83438E-01
5.0063
2
0.24328
14.5968
3
0.34307
20.5842
4
0.37563
22.5378
5
0.82597
49.5582
Fuente: Elaborada en este trabajo
Esta estructura presenta valores de frecuencia similares a la estructura alar 1 y
debido a la configuración de las vigas se generan algunos cambios en los modos
de vibración 3 y 4.
114
A continuación se muestran las gráficas correspondientes a cada modo de
vibración.
Figura 90. Primer modo de vibración de la estructura alar 3
Fuente: Obtenida en este trabajo
Este modo presenta un movimiento horizontal alrededor del eje Z, sin presentar
cambios en la geometría de las vigas.
Figura 91. Segundo modo de vibración de la estructura alar 3
Fuente: Obtenida en este trabajo
115
El movimiento comienza en una posición de reposo, gira alrededor del eje Y hacia
el lado positivo del eje Z y regresa a su posición inicial.
Figura 92.Tercer modo de vibración de la estructura alar 3
Fuente: Obtenida en este trabajo
Describe un movimiento horizontal en el eje X, presentando un pandeo
significativo en las vigas
Figura 93. Cuarto modo de vibración de la estructura alar 3
Fuente: Obtenida en este trabajo
116
El movimiento comienza en una posición de reposo, gira alrededor del eje Y hacia
al lado negativo del eje Z y regresa a su posición inicial.
Figura 94. Quinto modo de vibración de la estructura alar 3
Fuente: Obtenida en este trabajo
Describe un movimiento irregular en el plano X-Z, presentado una deformación
total tanto en las vigas como en las costillas de la estructura.
Del análisis mostrado anteriormente se llega a la conclusión, que para las tres
estructuras propuestas el valor al cual debe empezar a funcionar el mecanismo
debe ser mayor o igual a 60 rpm’s, pero debido a que se debe garantizar que el
elemento a estudiar no entre en resonancia se establece que el mecanismo debe
empezar a vibrar con una velocidad mínima de 100 rpm’s.
4.8 TUTORIAL
4.8.1 Tutorial en ANSYS para análisis modal de una estructura alar El
elemento a analizar es la estructura convencional de un ala de una longitud de
3000 mm, de ALUMINIO 2024 T3 cuyas propiedades son:
Modulo de elasticidad: 7,31e+10 Pa (73100 N/mm2)
Coeficiente de poisson: 0.33
Densidad: 2780 Kg/m3 (2.78e-6 Kg/mm2)
117
El objetivo de este tutorial es la simulación de los PRIMEROS 5 MODOS de
vibración en una estructura alar y conocer la frecuencia natural para cada uno de
ellos.
1. ESTABLECER GEOMETRÍA
Posterior a este paso el estudiante puede dibujar su estructura en un programa
como Solid Edge o cualquiera que le permita guardar el archivo como una
extensión .IGES o cualquiera compatible con ANSYS.
Nota: tenga en cuenta que para todo tipo de estudios en ANSYS las unidades
deben ser consistentes para efectos de este tutorial se utilizara (Kg; mm; N/mm2).
1. FILE > Import > IGES
Busque el archivo y espere unos minutos para que este sea abierto por ANSYS
118
2. DEFINIR MATERIALES
1. Main Menu>Preferentes
2. (seleccione) “structural”
3. OK
119
Definir las propiedades del material
1.
2.
3.
4.
5.
6.
7.
8.
Main Menu> Preprocessor> Material Props> Material Models
“DOBLE CLICK “ structural” > “linear” >”Elastic> “isotropic
“EX” = 73100
“PRXY”= 0.33
OK
(doble click) = “Density”
“DENS”= 2.78e-6
OK
9. Material> Exit
3. GENERAR MALLA
Defina el tipo de elemento
1.
2.
3.
4.
5.
6.
Main Menu> Preprocessor> Element Type> Add/Edit/Delete
{Add…}
“Structural Solid” (columna izquierda)
“Tet 10node 187” (columna derecha)
OK
Close
120
Enmallado
1. Main Menu>Preprocessor>Meshing>Mesh Tool
2. (Seleccione) “Smart Size”
3. (Desplace la barra hasta 3)” Mesh”
121
4. “Pick All”
122
5. Cierre la advertencia
4. APLICAR RESTRICCIONES
1. Main Menu> Preprocessor> Loads> Define Loads> Apply> Structural>
Displacement> On Areas
2. Seleccione las áreas en las cuales hay restricción (en este caso la sección
transversal de las vigas)
3. “DOFs to be contrained”= ALL DOF
4. OK
123
5. OBTENER SOLUCIÓN
Especifique el tipo de análisis y las opciones del mismo
1. Main Menu>Solution>Analysis Type > New Analysis
2. (Seleccione) “Modal”
3. OK
4.
5.
6.
7.
8.
9.
Main Menu>Solution>Analysis Tipe> Analysis Option
(Seleccione) “Block Lanczos”
“No. of modes to extract”= 5
“No. of modes to expand”= 5
(OK)
(OK)
124
Solución
1.
2.
3.
4.
Main Menu>Solution>Solve>Current LS
(OK)
(Yes )
(Yes)
125
6. REVISAR RESULTADOS
Lista de frecuencias Naturales
1. Main Menu>General Postproc>Result Summary
2. Observe la lista y cierre
126
Animación de las formas de los 5 modos
Animación del primer modo
1. Main Menu> General Postproc> Read Results> First Set
2. Utility Menu> PlotCtrls> Animate> Mode Shape
3. OK
Observe la forma del primer modo
127
Animación del segundo modo
1. Main Menu> General Postproc> Read Results> Next Set
2. Utility Menu> PlotCtrls> Animate> Mode Shape
Repita los dos últimos pasos para visualizar los siguientes modos
7. GUARDAR
Para que no encuentre ningún inconveniente en abrir su trabajo en cualquier
versión de ANSYS guarde de la siguiente manera:
1. Main Menu> Session Editor
2. Copie el contenido
128
3. Péguelo en un documento nuevo de Microsoft Word y guárdelo
2. para abrir de nuevo su trabajo en ANSYS. Abra el documento de Microsoft
Word y copie su contenido de nuevo en Session Editor >OK.
4.9 ESTUDIO ECONÓMICO
Este se divide en costos de materiales y en costos de manufactura con suministro
de material, de la siguiente manera:
4.9.1 Costos materiales
Tabla 16. Costos materiales
DECRIPCIÓN
ESPECIFICACIÓNES
CANT
VALOR
UNITARIO
VALOR
TOTAL
PROVEEDOR
PERNOS
CLASE 5.8 M12 -1.25
X 42.2
8
$ 495
$ 3.960
TORNILLOS
7777777
PERNOS
CLASE 5.8 M10 -1.25
X 48.8
4
$ 353
$ 1.412
TORNILLOS
7777777
129
Continuación tabla 16
PERNOS
PERNOS
CLASE 5.8 M 6 -1.25
X 20
CLASE 5.8 M 5 -1.25
X30
4
$ 250
$ 1.000
4
$ 230
$ 920
TORNILLOS
7777777
TORNILLOS
7777777
TORNILLOS
7777777
TORNILLOS
7777777
TORNILLOS
7777777
TORNILLOS
777777
TORNILLOS
777777
TORNILLOS
777777
TUERCAS
CLASE 5.8 M6
4
$ 70
$ 280
TUERCAS
CLASE 5.8 M5
4
$ 65
$ 260
TUERCAS
CLASE 5.8 M12
8
$ 120
$ 960
TUERCAS
CLASE 5.8 M10
4
$ 87
$ 348
ARANDELA
M12
8
$ 50
$ 400
ARANDELA
M10
4
$ 50
$ 200
VARILLA DE
ANCLAJE
5/8" X 6"
16
$ 2.000
$ 32.000
HILTI
MOTOR 1LA7 1618YB70
900RPM y 5HP
1
$ 1.696.800
$ 1.696.800
SIEMENS
NIVEL 1
SUBTOTAL
1
$ 36.000.000
$ 36.000.000
PRUFTECHNIK
VIBSCANNER
$ 37.738.540
Fuente: Elaborada en este trabajo
4.9.2 Costos de manufactura con suministro de material
- Estructura base
Tabla 17. Costos estructura base
DECRIPCIÓN
CORTE SOPORTES
VERTICALES
CORTE COLUMNAS
CORTE REFUERZOS
CORTE SOPORTES
CORTE LÁMINA
SUJETADORA
CORTE PLATINA
ESPECIFICACIONES
CANT
VALOR
UNITARIO
VALOR
TOTAL
PROVEEDOR
1,6 m X 0,15 m
CALIBRE 12,7 mm
4
$ 80.000
$ 320.000
FERRECORTES
2
$ 211.000
$ 422.000
FERRECORTES
4
$ 29.000
$ 116.000
FERRECORTES
2
$ 40.000
$ 80.000
FERRECORTES
1
$ 70.000
$ 70.000
FERRECORTES
2
$ 7.000
$ 14.000
FERRECORTES
1,6 m X 0,4 m
CALIBRE 12,7 mm
0,875 m X 0,1 m
CALIBRE 12,7 mm
0,4 m X 0,3 m
CALIBRE 12,7 mm
1,175 m x 0,18 m
CALIBRE 12,7 mm
0,18 m X 0,12 m
CALIBRE 12,7 mm
130
Continuación tabla 17
TALADRADO
AGUJEROS
TALADRADO
AGUJEROS
TALADRADO
AGUJEROS
SOLDADURA DE LA
ESTRUCTURA BASE
MAQUINADO DE
ANILLOS (LUGS)
SOLDADURA DE
ANILLOS (LUGS)
10,8 mm
8
$ 300
$ 2.400
FERRECORTES
12,8 mm
60
$ 300
$ 18.000
FERRECORTES
16 mm
8
$ 300
$ 2.400
FERRECORTES
metros
9,56
$ 20.000
$ 191.200
FERRECORTES
__
8
$ 200
$ 1.600
FERRECORTES
20 mm
8
$ 1.000
$ 8.000
FERRECORTES
SUBTOTAL
$ 387.600
Fuente: Elaborada en este trabajo
- Mecanismo
Tabla 18. Costos mecanismo
DESCRIPCIÓN
ESPECIFICACIONES
CANT
VALOR
UNITARIO
VALOR
TOTAL
PROVEEDOR
CORTE BIELA
39,85 cm X 4cm
CALIBRE 10 mm
1
$ 6.000
$ 6.000
FERRECORTES
CORTE DE
ASEGURADORES
0,3 cm X 3 cm
4
$ 500
$ 2.000
FERRECORTES
CORTE Y
MAQUINADO DE
PASADORES
2 cm x 5 cm, con 2
agujeros de 3 mm
2
$ 3.500
$ 7.000
FERRECORTES
CORTE Y
TALADRADO DEL
DISCO
16 cm con 1 agujero
excéntrico de 2 cm
1
$ 13.000
$ 13.000
FERRECORTES
MAQUINADO DEL
EJE DEL DISCO CON
CHAVETERO
__
1
$ 25.000
$ 25.000
MECANICA
INDUSTRIAL
MAQUINADO DE
CHAVETA
8 mm X 8 mm X 10
mm
1
$ 300
$ 300
FERRECORTES
MAQUINADO LÁMINA
DE UNIÓN ALA MECANISMO
__
1
$ 120.000
$ 120.000
MUNDIAL DE
ALUMINIOS
MAQUINADO MESA
DE
DESPLAZAMIENTO
Fresado con HSS T Slot Cutter C810
1
$ 220.000
$ 220.000
FERRECORTES
SUBTOTAL
$ 387.300
131
-Estructura alar
Tabla 19. Costos estructura alar
DESCRIPCIÓN
ESPECIFICACIONES
CANT
VALOR
UNITARIO
VALOR TOTAL
PROVEEDOR
LAMINA DE
ALUMINIO 2024-T3
1.22 m X 3.66 m
CALIBRE O.2
2
$ 400.000
$ 800.000
PROVEMA
CORTE DE
VIGAS
CORTE DE
COSTILLAS
LONGITUD
NACA 2412 CUERDA
1,066 m
$ 20.000
$ 80.000
$ 20.000
$ 120.000
DOBLADO DE LAS
VIGAS
3m
4
$ 20.000
$ 80.000
MUNDIAL DE
ALUMINIOS
FRESADO DE
AGUJEROS
ALIJERADORES DE
LAS COSTILLAS
__
24
$ 30.000
$ 720.000
MUNDIAL DE
ALUMINIOS
SOLDADURA DE LA
ESTRUCTURA ALAR
SOLDADURA DE
ALUMINIO DE 3,23
mm
2,8
$ 30.000
$ 84.000
MUNDIAL DE
ALUMINIOS
4
6
SUBTOTAL
MUNDIAL DE
ALUMINIOS
MUNDIAL DE
ALUMINIOS
$ 1.884.000
Fuente: Elaborada en este trabajo
El costo total de la construcción del banco para análisis de vibraciones es:
Tabla 20. Costo total de la construcción del banco
SUBTOTALES
MATERIAL
ESTRUCTURA BASE
MECANISMO
ESTRUCTURA ALAR
TOTAL
$ 37.738.540
$ 387.600
$ 387.300
$ 1.884.000
$ 40.397.440
Fuente: Elaborada en este trabajo
Teniendo en cuenta que la vida útil para maquinaria y equipo es de 10 años, se
realiza una depreciación en línea recta de la siguiente manera:
Depreciaciòn ⋅ mensual =
valor a depreciar
vida util estimada
132
(104)
Por tanto,
Depreciaciòn ⋅ mensual =
$40.397.440
= $336.645
10 *12
Esta cifra indica que el valor del activo disminuye $336.645 por cada mes de uso.
La fabricación de este banco puede llevarse a cabo sin incluir la manufactura de la
estructura alar, lo cual genera una reducción en los costos y autonomía para los
estudiantes y profesores que deseen elaborar una estructura a analizar. Los
costos se reducen a:
SUBTOTALES
MATERIAL
ESTRUCTURA BASE
MECANISMO
TOTAL
133
$ 37.738.540
$ 387.600
$ 387.300
$ 38.513.440
CONCLUSIONES
- Se encontró que existen bancos de pruebas para máquinas rotativas con fines
académicos más no para analizar el comportamiento de estructuras en general,
por lo cual se propusieron tres alternativas escogiendo la que cumpliera con la
rigidez estructural, dimensiones que se ajustaran al espacio proporcionado por la
universidad, una simulación ala – fuselaje apropiada y seguridad para el operario
los cuales son los parámetros más relevantes de los criterios de selección de la
estructura base.
- Gracias a la realización de este proyecto se obtienen los puntos de una
estructura en los cuales las vibraciones tienen mayor influencia causando daños
severos en esta, se logra predecir el valor máximo de ciclos permitidos que
soporta una estructura para determinadas condiciones.
- Se observó que efectuar un estudio analítico de vibraciones para una estructura
compleja en este caso una estructura alar, resulta ser inexacto en comparación
con un estudio realizado mediante un software de elementos finitos, debido a que
manualmente se deben asumir algunas condiciones para facilitar el cálculo.
- Teniendo en cuenta que las estructuras presentan frecuencias naturales del
orden de 0.08 Hz – 2 Hz, se diseñó un mecanismo que pasara rápidamente por
este rango evitando que la estructura entre en resonancia
- Debido a la configuración de las vigas en las tres estructuras alares
seleccionadas para el análisis modal, se notó que los movimientos del tercer y
cuarto modo para la estructura con vigas en C es diferente comparado con la
configuración de las vigas en I y las vigas en CI respectivamente.
- Aunque la estructura base va estar sometida a esfuerzos alternantes se logró
obtener un diseño estructural que tuviera vida teóricamente infinita.
- Se encontraron dificultades tanto para realizar los análisis requeridos para el
diseño del banco, como para poner en práctica el tutorial en los laboratorios de la
universidad, debido a que la licencia académica del software de elementos finitos
ANSYS esta limitada a 16000 nodos.
134
- Se proporciona a la universidad el diseño detallado de un banco para el análisis
de vibraciones en una estructura alar, que al ser construido suministrará las
condiciones necesarias para realizar laboratorios académicos, de los cuales se
pueden obtener nuevos conocimientos en vibraciones.
135
RECOMENDACIONES
Teniendo en cuenta que la institución carece de un laboratorio para prácticas
estructurales, se sugiere la implementación de un banco para el análisis de
vibraciones en el cual los estudiantes y profesores pueden obtener nuevos
conocimientos.
Se recomienda consultar a un ingeniero civil para la adecuación del banco ya que
se requiere de un cimiento de concreto adicional para distribuir las cargas
concentradas desde el banco al lugar de adecuación del mismo.
Al momento de la construcción se recomienda tener en cuenta las tolerancias
indicadas en los planos de fabricación, ya que si se sobre pasan estas tolerancias
afectaría la precisión de las pruebas realizas.
Se sugiere que la universidad adquiera una licencia académica del software de
elementos finitos ANSYS con un número de nodos ilimitados, que permita realizar
el análisis de esfuerzos, deformaciones, análisis modal entre otros para
estructuras complejas.
136
BIBLIOGRAFÍA
ASOCIACIÓN COLOMBIANA DE INGENIEROS (ACIEM), Mantenimiento
Predictivo Basado en Vibraciones. Bogotá, Colombia, 2005
ERDMAN Arthur G. & SANDOR Jorge N. Diseño de Mecanismos: Análisis y
Síntesis. Prentice Hall Hispanoamericana S.A, México. 1998
INSTITUTO COLOMBIANO DE NORMAS TÉCNICAS (ICONTEC). Compendio de
Dibujo Técnico.
INSTITUTO COLOMBIANO DE NORMAS TÉCNICAS Y CERTIFICACIÓN.
Compendio tesis y otros trabajos de grado. 5 ed, Bogotá
MANGONON, Pat L. Ciencias de Materiales: Selección y Diseño. Pearson
Educación, México, 2001.
MERIAM J. L. Mechanics Part II, John Wiley & Sons, New York, 1959
MOTT, Robert L. Diseño de Elementos
Hispanoamericana S.A, México. 1995.
de
máquina.
Prentice
Hall
NORTON, Robert. Diseño de maquinaria. Mc Graw Hill, México, 2000.
NORTON, Robert. Diseño de máquinas. Prentice Hall, México, 1999.
SHIGLEY, Joseph Edward.
Interamericana, México, 1990
Diseño
en
Ingeniería
Mecánica.
Mc
Graw
THONMSON, William T. Vibration Theory and Applications, Prentice Hall, United
States of America, 1965.
137
UNIVERSIDAD DE SAN BUENAVENTURA. Caracterización del sistema de
investigación bonaventuriano. Ed. Bonaventuriana, Bogotá, 2005.
http://www.amidata.es
http://www.centennialofflight.gov/essay/Dictionary/Wing_Construction/DI107.htm
http://www.dliengineering.com/vibman-spanish/queesvibracin.htm
http://www.iberisa.com/soporte/fatiga/intro.htmhttp://inicia.es/de/vuelo/PBV/PBV14.
html
http://www.nasa.gov/
http://nctn.hq.nasa.gov/innovation/innovation94/5-aerotech2.html
http://www.pruftechnik.com/index__.htm
http://www.siemens.com.co/SiemensDotNetClient_Andina/Medias/PDFS/237_200
60316111409.pdf
http://www.tamu.es/pages/tornillos_metrica.asp
http://www.telesat.com.co/bin/siemens/
138
ANEXO A
PROPIEDADES MECÁNICAS DEL ALUMINIO 2024-T3
Fuente: www.matweb.com
139
ANEXO B
PROPIEDADES DE LOS ACEROS ASTM
ESPEC. DE
LA ASTM
calidad
Especificación
para
Composición química, % en peso.
C, màx
A36/
A36M-93a
Placas hasta
¾”
Aplicaciones
generales
¾”- 1½”
1½”-4”
A572/
A572M-93
40
50
60
65
0.40% Si
0.20% Cu
0.80-1.20
0.40% Si
0.20% Cu
0.29
0.85-1.20
0.15-0.40%
Si
Construcción
soldada,
remachada o
con pernos
para usos
generales
0.15
100%
0.20% Cu
Puentes,
edificios y
otras
estructuras
con buena
tenacidad con
muesca
0.21
1.35%
0.23
1.35%
0.26
1.35%
0.23
0.26
1.65%
Más de 4”
¾”
<1.0
Otros
0.25
¾”-1 ½”
A242/
A242M-93
0.25
Mn
Esfuerzo de
Fluencia
(Mpa)
250
345
315
290
0.40% Si
0.05% Cb
0.02-0.15%
V
Fuente: Libro, Ciencia de materiales selección y diseño. p757
140
290
345
415
450
ANEXO C
PROPIEDADES DEL METAL SOLDANTE
Fuente: Libro, Diseño en ingeniería mecánica, p450
141
ANEXO D
CARACTERÍSTICAS DE LOS ELECTRODOS
Fuente: OERLIKON
142
ANEXO E
CARACTERÍSTICAS DE LA ROSCA DE PASO FINO Y DE PASO BASTO.
Fuente: Libro, Diseño en ingeniería mecánica, p369
143
ANEXO F
DIMENSIONES DE TUERCAS
Fuente: Libro, Diseño en ingeniería mecánica, p868
144
ANEXO G
DIMENSIONES DE PERNOS DE CABEZA CUADRADA O HEXAGONAL.
Fuente: Libro, Diseño en ingeniería mecánica, p860
145
ANEXO H
PROPIEDADES DEL MATERIAL PARA HY 150 - ADHESIVO CURADO
Fuente: catalogo técnico HILTI
146
ANEXO I
FACTOR DE CONCENTRACIÓN DE ESFUERZOS GEOMÉTRICOS Kt A
TENSIÓN AXIAL
Fuente: Libro, Diseño de Máquinas, p1006
147
ANEXO J
CONSTANTE DE NEUBER PARA ACEROS.
Fuente: Libro, Diseño de Máquinas, p390
148
ANEXO K
FACTOR DE CONCENTRACIÓN DE ESFUERZOS GEOMÉTRICOS Kt A
FLEXIÓN
Fuente: Libro, Diseño de Máquinas, p1006
149
ANEXO L
COEFICIENTE PARA LA ECUACIÓN DEL FACTOR SUPERFICIAL
Fuente: Libro, Diseño de máquinas, p378
150
ANEXO M
MANUAL DE OPERACIÓN Y
MANTENIMIENTO
Mayo del 2007
151
INTRODUCCIÓN
Toda máquina llevada a la construcción requiere de unas especificaciones de
manejo; por esto la elaboración de un manual de operación y mantenimiento, que
contiene el paso a paso de las tareas que el usuario debe realizar para obtener un
alto grado de exactitud en las pruebas de vibraciones que lleve a cabo en una
estructura alar, además las recomendaciones de mantenimiento sirven para
prolongar la vida útil de cada una de las partes del banco.
Para mayor claridad este manual, en la parte inicial describe los componentes que
conforman el banco de prueba para el análisis de vibraciones tales como
mecanismo simulador de vibraciones y estructura base, ya que durante todo el
desarrollo de este manual se van a mencionar y no se quiere ninguna confusión
de los términos utilizados.
152
MANUAL DE OPERACIÓN
1. ESQUEMA GENERAL DEL BANCO
a. Estructura base
b. Mecanismo simulador de vibraciones
c. Dispositivo de medición de las características de vibración
153
2. ESPECIFICACIONES DEL BANCO
EPECIFICACIONES GENERALES
Desplazamiento generado por el
mecanismo
Desplazamiento del mecanismo, a lo
largo de la mesa.
Peso total
5 cm.
0 - 1m
305.46 kg
ESPECIFICACIONES DEL MOTOR
Nº Fases
Frecuencia
Potencia
Velocidad
Voltaje
Trifásico
60 Hz
5HP
900 rpm (8 polos)
220/240V
La siguiente gráfica muestra la distribución del lugar provisto para realizar las
pruebas.
154
3. LISTA DE COMPONENTES
Estructura Base
a- Lámina principal
b- Platinas sujetadoras para la estructura alar
155
c- Pernos de sujeción
Mecanismo Simulador de Vibraciones
a- Mesa de desplazamiento
b- Motor generador de potencia (2HP)
c- Disco
d- Biela
e- Lámina de unión ala-mecanismo
f- Pasador A
g- Pasador B
156
Dispositivo medidor de vibraciones
•
VIBSCANNER
a- Sensores e interfaces: mide directamente los parámetros más importantes.
b- Despliegue de alarmas: esta conformado por cuatro LED’S que de acuerdo
al color indican lo siguiente
Verde = preadvertencia
Amarillo = advertencia 1
Rojo = alarma
Azul = todo esta bien
c- Despliegue gráfico retroalimentado: símbolos de medición claros.
d- Navegador joystick
e- Batería: esta es recargable de cambio rápido en la parte inferior del
instrumento garantizando ocho horas de operación.
157
4. DESCRIPCIÓN
El banco para análisis de vibraciones esta conformado por tres (3) partes
fundamentales:
ESTRUCTURA BASE
Esta estructura tiene unas dimensiones de 1.60 m de altura, 1.20 m de largo y
0.4m de profundidad. Cuenta con una lámina principal, ubicada a 1.20 m desde la
base del piso, dispuesta con agujeros, los cuales están separados a una distancia
de 0.020 m.
Los agujeros dispuestos en la lámina principal sirven para ensamblar la estructura
alar a analizar, por medio de dos platinas sujetadoras las cuales se ajustan a un
tipo de ensamble ala-fuselaje convencional. Por último cuenta con cuatro pernos
que garantizan una posición recta y fija para la estructura alar. Como se indica en
la figura.
158
MECANISMO
Este consiste en un disco circular el cual esta conectado al motor mediante un eje
de giro, en este disco se encuentra otro eje que está situado paralelo al eje de giro
llamado eje excéntrico y este a su vez esta acoplado a una biela para transformar
un movimiento giratorio en movimiento armónico simple.
Por medio de un pasador la biela se conecta a una lámina que une el mecanismo
con el ala, el cual asegura un perfecto acople por medio de pernos a la punta de
la estructura alar.
El mecanismo esta colocado en una mesa la cual permite que el mecanismo se
desplace a tres puntos establecidos a lo largo de la cuerda del perfil.
VIBSCANNER
Este dispositivo cuenta con unos sensores los cuales pueden colocarse en
cualquier parte del elemento a analizar y de este punto obtener datos de
desplazamiento, velocidad y aceleración para una determinada frecuencia de
vibración.
Toda la información almacenada en el VIBSCANNER se descarga a un
computador que debe tener el software OMNITREND y así hacer un estudio
detallado de los resultados.
NOTA: para mayores especificaciones remítase al manual de operación del
VIBSCANNER
159
5. PROCEDIMIENTO PARA EL ANÁLISIS DE VIBRACIONES
A. Montaje de la Estructura Alar
Asegúrese que los anillos que están colocados en el extremo de las vigas
principal y trasera cuenten con las mismas dimensiones de los anillos dispuestos
en las platinas sujetadoras.
Instale las platinas sujetadoras en la lámina principal por medio de los pernos de
12mm, así
160
Primero coloque el perno, después la arandela y por ultimo la tuerca. El apriete de
la tuerca debe ser realizado con una llave de 18 mm
Ahora situé cuidadosamente la estructura alar en los anillos dispuestos en las
platinas sujetadoras con pernos de 10mm, para este paso se recomienda contar
con la ayuda de un auxiliar.
El montaje debe quedar de la siguiente manera:
Primero coloque el perno, después la arandela y por último la tuerca. El apriete de
la tuerca se realiza con un rache con copa de 16 mm
B. Acoplamiento del mecanismo con la estructura a analizar
Si desea obtener una vibración con desplazamiento vertical, traslade el
mecanismo de tal modo que quede en la mitad de la cuerda del perfil y asegure la
lámina de unión por medio de pernos, de la siguiente manera:
161
Pero si requiere de vibraciones en sentido rotacional, puede deslizar el mecanismo
para la derecha o izquierda y fijar nuevamente la lamina de unión.
C. Simulación del movimiento vibratorio
Ya definido el desplazamiento vibratorio, ponga en funcionamiento el motor con el
switch de encendido y espere unos segundos para que se estabilice el movimiento
para lograr un desplazamiento alternante de 5cm en el elemento a analizar.
D. Medición de las vibraciones
Sitúe el sensor del VIBSCANNER en los puntos críticos del elemento que esté
analizando y posteriormente descárguelos en el computador, para obtener gráficas
similares a las siguientes.
162
Desplazamiento vs. Frecuencia natural
Velocidad vs. Frecuencia natural
163
Aceleración vs. Frecuencia natural
E. Después de realizar la prueba, apague el motor y retire la lámina de unión alamecanismo y colóquela cuidadosamente sobre la mesa de desplazamiento.
F. Desensamble la estructura alar de la estructura base.
164
MANUAL DE MANTENIMIENTO
Mantenimiento preventivo
Asegúrese que el lugar de adecuación del banco para análisis de
vibraciones esté libre de humedad.
A continuación se muestran las tareas que se le deben efectuar al banco para
obtener un buen funcionamiento, donde:
Nivel 1: Tareas realizadas por el operario
Nivel 2: Tareas realizadas por técnicos internos de la universidad
Nivel 3: Tareas realizadas por técnicos o empresas externas
ACTIVIDAD
Inspeccionar que los
sensores de medición
del VIBSCANNER
estén en posición
perpendicular u
ortogonal a la superficie
a analizar
Inspeccionar que el
equipo este
funcionando bajo
condiciones de diseño
Inspeccionar que el
motor este anclado
correctamente a la
mesa
Limpiar las ranuras de
la mesa de
desplazamiento, por
acumulación de
impurezas
MATERIAL
FRECUENCIA
NIVEL
Sensor
VIBSCANNER
Al realizar cada
prueba
1
Manual de operación
Al realizar cada
prueba
1
____
Al realizar cada
prueba
1
Bayetilla
Brocha mediana
Al realizar cada
prueba
1
165
Limpiar la lamina de
unión ala mecanismo,
por acumulación de
polvo
Limpiar la platina
sujetadora por
acumulación de
impurezas
Mantener el área de
trabajo libre de polvo y
humedad
Inspeccionar
visualmente las uniones
soldadas de la
estructura base, por
existencia de fisuras o
grietas.
Inspeccionar
visualmente la Lámina
de unión alamecanismo por fisuras,
grietas o corrosión en el
pasador A y B
Inspeccionar
visualmente Agujeros
lamina principal y
agujeros del pasador A
y B por fisuras o grietas
Inspeccionar
visualmente los
Anclajes Al concreto por
fisuras o grietas
Bayetilla
Una vez por
Semana
2
Bayetilla
Una vez por
Semana
2
Elementos de aseo
generales
Una vez por
Semana
2
Lupa de 10
aumentos
Una vez por mes
2
Lupa de 10
aumentos
Cada 3 meses
2
Lupa de 10
aumentos
Cada 3 meses
2
Lupa de 10
aumentos
Cada 3 meses
2
Inspeccionar con tintas
penetrantes la lámina
principal por fisuras
profundas
Tintas penetrantes
fluorescente
Cada 24 meses
3
Inspeccionar con tintas
penetrantes la biela por
Tintas penetrantes
fluorescente
Cada 24 meses
3
166
fisuras
Inspeccionar con tintas
penetrantes el disco por
fisuras
Inspeccionar con tintas
penetrantes los
pasadores A y B por
fisuras
Lubricar los pasadores
A y B por fricción
Calibrar el equipo de
medición VIBSCANNER
Verificar que las
conexiones estén
acordes con las
especificaciones del
motor
Tintas penetrantes
fluorescente
Cada 24 meses
3
Tintas penetrantes
fluorescente
Cada 24 meses
3
lubricante
Cada 3 meses
2
Manual de
VIBSCANNER
Al realizar cada
prueba
1
Multimetro
Al realizar la
adecuación del
banco
2
Mantenimiento Correctivo
Si se encuentra alguna fisura o corrosión después de realizar inspecciones
visuales o tintas penetrantes, se bebe cambiar inmediatamente el componente
antes de poner en funcionamiento el banco para análisis de vibraciones.
Cambiar los pernos M10 y M12 cada 400000 ciclos.
si se excede la carga de diseño sobre el mecanismo, la chaveta falla
automáticamente y debe reemplazarse.
La chaveta debe ser fabricada de acero 1010 y teniendo en cuenta las siguientes
dimensiones:
167
ANEXO N
CÁLCULOS DE POTENCIA
Teniendo en cuenta que el mecanismo debe ser capaz de deflectar la estructura
alar 0,05m se realizan los cálculos que se muestran a continuación:
La máxima reacción que se presenta en el punto B esta dada para la posición de
0º = 622.72N
Radio entre ejes = 0,05m
Peso:
W = 622,72 N
Torque:
T = W * r = (622,72 N )(0,05m) = 31,136 Nm
Siendo un motor de 900 RPM, se tiene que la potencia requerida es:
rev 2πrad 1 min
rad
w = 900
= 94,25
min 1rev 60 s
s
rad
= 2934,568W = 2,93kW ≈ 3.9 HP
P = T * w = (31,136 Nm ) 94,25
seg
Por este motivo se elige un motor de 5HP de potencia.
168
ANEXO O
PLANOS ESTRUCTURA BASE Y MECANISMO
169