Instituto Politécnico Nacional
Anuncio

Instituto Politécnico Nacional
Escuela Superior de Física y Matemáticas
Geometría Algebraica
Básica Ejemplificada
Tesis que presenta
Cristhian Emmanuel Garay López
Para obtener el Grado de
Licenciado en Física y Matemáticas
con especialidad en Matemáticas
Director de Tesis
Dr. Carlos Rentería Márquez
México D.F.
Noviembre de 2005
A mis padres:
Felipe Garay Núñez y Yolanda López Valdéz.
Los amo.
ii
Índice general
Agradecimientos
V
Prefacio
VII
Introducción
IX
1. Variedades Afines
1.1. Conjuntos Algebraicos y la Topologı́a de
1.2. Irreducibilidad . . . . . . . . . . . . . .
1.3. El Nullstellensatz de Hilbert . . . . . . .
1.4. Propiedades Topológicas . . . . . . . . .
1.5. Dimensión . . . . . . . . . . . . . . . . .
.
.
.
.
.
1
1
3
5
12
15
.
.
.
.
.
.
.
.
23
24
27
31
31
33
36
39
42
.
.
.
.
.
47
47
58
62
67
72
Zariski .
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
2. Variedades Proyectivas
2.1. El Espacio Proyectivo y Variedades Proyectivas . . .
2.2. El Nullstellensatz Homogéneo y Conos Afines . . . .
2.3. Cubierta Afı́n y Dimensión . . . . . . . . . . . . . .
2.3.1. Relación entre variedades afines y proyectivas
2.3.2. Dimensión . . . . . . . . . . . . . . . . . . . .
2.4. La Inmersión d-ésima de Veronese . . . . . . . . . .
2.5. La Inmersión de Segre . . . . . . . . . . . . . . . . .
2.6. Intersecciones de Variedades Proyectivas . . . . . . .
3. Morfismos
3.1. La Categorı́a de las Variedades Algebraicas
3.2. Ejemplos y Contraejemplos . . . . . . . . .
3.3. Morfismos entre Espacios Proyectivos . . .
3.4. Productos de Variedades . . . . . . . . . . .
3.5. Variedades Normales . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4. Mapeos racionales
75
4.1. Mapeos racionales y Equivalencia birracional . . . . . . . . . . . . . . . . . . . . . . 75
4.2. Una base para la topologı́a de Zariski . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.3. Explosión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
iii
Índice general
Índice general
5. Intersecciones en el Espacio Proyectivo
5.1. El Polinomio de Hilbert y el grado de un
5.2. Códigos algebraicos de Evaluación . . .
5.2.1. Preliminares algebraicos . . . . .
5.2.2. Códigos . . . . . . . . . . . . . .
5.2.3. Algunos ejemplos . . . . . . . . .
Conclusiones
conjunto algebraico
. . . . . . . . . . . .
. . . . . . . . . . . .
. . . . . . . . . . . .
. . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
87
87
94
94
96
98
99
A. Tópicos en Álgebra
101
A.1. Álgebra Conmutativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
A.2. Categorı́as . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Índice de Figuras
107
Índice de Notación
109
Índice Alfabético
111
Bibliografı́a
113
iv
Agradecimientos
Deseo agradecer a la Academia Mexicana de Ciencias y al Dr. Jesús González Espino
Barros del Centro de Investigación y Estudios Avanzados del IPN, por haberme dado la
oportunidad de participar en el XIV Verano de la Investigación Cientı́fica, donde descubrı́ por vez
primera este tema tan apasionante y hermoso que es la Geometrı́a Algebraica. A mi asesor de tesis,
el Dr. Carlos Renterı́a Márquez de la Escuela Superior de Fı́sica y Matemáticas del IPN,
por toda su paciencia, apoyo e ideas aportadas.
Al comité organizador del VII Encuentro de Geometrı́a Algebraica, llevado a cabo en el Centro
de Investigación en Matemáticas, por darme la oportunidad de asistir al evento y ampliar mi
panorama. A la Dra. Rita Zuazua y al comité organizador del taller Aprendiendo a Investigar en
Morelia (todos del Instituto de Matemáticas de la Universidad Nacional Autónoma de
México, unidad Morelia, donde contamos con el apoyo del proyecto PAPIME-UNAM EN-100304),
dónde aprendı́ más sobre la Teorı́a de Categorı́as, la cual juega un papel muy importante en este
trabajo.
A todos mis profesores y amigos de la ESFM, en especial a los profesores Emigdio Salazar
Cordero y Marco Antonio Rodrı́guez Andrade, quienes siempre me apoyaron en deması́a. Muy
especialmente agradezco a Blanca Lucı́a Moreno Ley, quién fue mi pilar y mucho más en todo
momento.
Pero sobre todo, quiero enviar un infinito agradecimiento a mis padres: Felipe Garay Núñez y
Yolanda López Valdéz, cuyo apoyo y comprensión siempre estuvo a mi disposición. A ellos debo
todo lo que soy y dedico este trabajo.
v
Agradecimientos
Índice general
Índice general
vi
Prefacio
“As long as algebra and geometry proceeded along separate paths, their advance was
slow and their applications limited. But when these sciences joined company they drew
from each other fresh vitality and thenceforward march on at a rapid pace towards
perfection”.
–Joseph Louis Lagrange.
Por largo tiempo, la Geometrı́a Algebraica moderna ha sido considerada como una parte muy
compleja de las matemáticas, la cual recurre prácticamente a cualquier otra rama para construir
sus conceptos y métodos; por ello se ha vuelto una herramienta indispensable en muchas teorı́as
que a primera vista parecerı́an demasiado remotas; en la actualidad toca a casi toda rama de las
matemáticas. Comparte con la teorı́a de números la distinción de tener una de las más largas e
intrincadas historias de entre todas las ramas de nuestra ciencia, de haber atraı́do por siempre los
esfuerzos de los mejores matemáticos de cada generación, y de ser aún una de las áreas más activas
de investigación. Estos puntos deberı́an ser suficientes para justificar (aunque sea en parte) el que
se haya realizado el presente trabajo.
La Geometrı́a Algebraica es en general el estudio de las geometrı́as que vienen del álgebra, en
particular, de los anillos. De manera clásica, el álgebra es el anillo de polinomios y la geometrı́a es
el conjunto de ceros de sistemas de ecuaciones polinomiales. En sus principios la materia se desarrollaba alrededor del problema de la clasificación, la búsqueda de invariantes de transformaciones,
problemas de intersección y en el estudio de las familias de puntos en una curva o curvas dentro
de una superficie (conocidos como sistemas lineales). En el siglo veinte se descubrió que las ideas
básicas se pueden aplicar a cualquier anillo conmutativo con identidad. La geometrı́a de dicho anillo
está determinada por su estructura algebraica, en particular por sus ideales primos. La Geometrı́a
Algebraica se volvió muy importante en muchas áreas de las matemáticas, más notablemente en la
Teorı́a Algebraica de Numeros. Por ejemplo, Pierre Deligne la utilizó para probar una variante de
la Hipótesis de Riemann, y la demostración del Último Teorema de Fermat dada por Andrew Wiles
utilizó herramientas desarrolladas en la Geometrı́a Algebraica.
Una clase importante de objetos que aparecen al estudiar esta disciplina son las variedades
abelianas, que son ciertos objetos a cuyos puntos se les puede dar una estructura de grupo. Los
ejemplos tı́picos son las curvas elı́pticas, las cuales tienen una teorı́a muy rica y son muy utilizadas en
las técnicas de seguridad de la información (Criptografı́a). La Teorı́a Algebraica de Códigos también
se ha visto beneficiada por las técnicas desarrolladas en Geometrı́a Algebraica, en particular en este
trabajo discutimos someramente los grupos algebraicos y hacı́a el final abordamos una serie de
ejemplos en el terreno de la Teorı́a Algebraica de Códigos. En el libro de van Lint [vL99] se puede
encontrar una introducción a la moderna teorı́a matemática de códigos, ası́ como diversas notas
históricas acerca del nacimiento y desarrollo de la disciplina en años recientes.
vii
Índice Prefacio
general
Índice general
Además de ser una de las disciplinas centrales de las matemáticas puras, los métodos para
la computación efectiva con polinomios concretos dados han sido también desarrollados; ha sido
aplicada con éxito a problemas en complejidad computacional y teorı́a de algoritmos, robótica,
teorı́a del control, geometrı́a computacional, modelación geométrica, reconocimiento de imágenes,
visión computacional y visualización cientı́fica. La técnica más importante es la de bases de Gröbner,
la cual es empleada en todos los sistemas actuales de Álgebra Computacional.
Para el lector interesado en conocer más sobre los aspectos históricos de esta disciplina, queremos
decirles que hay excelentes fuentes bibliográficas para tal efecto. En primer lugar tenemos el artı́culo
de Jean Dieudonné [Die72], donde da una descripción histórica muy amplia y detallada, con énfasis
en los progresos y problemas considerados como centrales a lo largo del desarrollo de la Geometrı́a
Algebraica. También es benéfico leer la introducción del libro de Hideyuki Matsumura [Mat89],
donde detalla la fructı́fera colaboración entre el Álgebra Conmutativa y la Geometrı́a Algebraica.
Por último pero no menos importante, es interesante conocer la vida del personaje que cambió para siempre la forma en que se trabaja en matemáticas (y en particular en este campo, donde
dejo su aportación más importante); nos referimos a Alexandre Grothendieck, de quien se puede
hallar un extracto biográfico muy interesante en [Jac04].
viii
Introducción
La Geometrı́a Algebraica es una mezcla de ideas de dos culturas Mediterráneas. Es la superposición de la ciencia Árabe que versa sobre el cálculo de soluciones a ecuaciones sobre el arte
Griego de la posición y la forma; estudia el delicado balance entre lo geométricamente plausible y
lo algebraicamente posible.
Para poder hallar resultados innovadores en los campos en los que se aplica, es necesario tener un conocimiento teórico sólido apoyado por una buena cantidad de intuición e imaginación. El
objetivo principal de este trabajo ha sido desarrollar paralelamente a la teorı́a básica de un primer
acercamiento formal al tema, una serie de ejemplos seleccionados para ilustrar fenómenos que consideramos como importantes e interesantes para dicho fin. Hemos resuelto los ejercicios de un libro
clásico en la literatura (Secciones 1,2,3,4 y 7 del Capı́tulo 1 de [Har77]), el cuál aún después de casi
30 años de haber sido publicado por primera vez se sigue utilizando con buenos resultados como
introducción a cursos de Geometrı́a Algebraica a estudiantes de posgrado a lo largo y ancho del
mundo. Los ejercicios no son estériles, sino que ayudan a asimilar mejor los conceptos básicos y
también a obtener un buen soporte para entender y apreciar los desarrollos más abstractos de la
Geometrı́a Algebraica moderna, además de crear una buena fuente de detalles e ideas contra los
cuales podamos comparar nuestra intuición.
Podemos decir ası́ que la parte más importante de este trabajo son los ejemplos resueltos, los
cuales son sumamente importantes en una disciplina con fundamentos geométricos. Los utilizaremos
una y otra vez a lo largo de los 5 Capı́tulos de esta Tesis para avanzar en el desarrollo de los conceptos
y aplicaciones. Deseamos trabajar dentro de los conceptos establecidos por la Teorı́a de Categorı́as,
por lo que en los capı́tulos 1 y 2 definimos los objetos principales de investigación: las variedades
algebraicas en el espacio afı́n o proyectivo sobre un campo algebraicamente cerrado, y utilizamos
libremente conceptos topológicos y algebraicos para definir herramientas necesarias para su estudio
y clasificación, por ejemplo, los conceptos de dimensión (secciones 1.5 y 2.3.2) y de grado y género
aritmético (Sección 5.1). Posteriormente en el Capı́tulo 3 definiremos los morfismos con los que
trabajaremos, obteniendo ası́ la categorı́a clásica de las variedades algebraicas y la noción primaria
de “igualdad” o isomorfismo de variedades. En esta parte damos una gran cantidad de ejemplos
para ayudar a la rápida asimilación de estos conceptos.
En cualquier rama de las matemáticas, usualmente encontramos problemas relevantes que parecen tan difı́ciles que nadie espera sean resueltos completamente, aunque proveen un gran estı́mulo
para el desarrollo de la materia, además de que sirven como patrones para medir el progreso y
el desarrollo en dicho campo. En Geometrı́a Algebraica podemos decir que dicho problema es el
problema de la clasificación de las variedades. La forma más fuerte de este problema es clasificar a
todas las variedades salvo isomorfismo. Como un primer paso hacı́a este objetivo estudiaremos en
el Capı́tulo 4 la noción de equivalencia birracional (la cual es un poco menos rı́gida que la noción
de isomorfismo). En el último capı́tulo utilizamos herramientas algebraicas muy sofisticadas para
ix
Introducción
Índice
general
Índice general
dar una serie de ejemplos de una clase de códigos algebraicos llamados de evaluación, los cuales se
construyen sobre cierto tipo de variedades proyectivas.
Avisos
Las convenciones básicas son las siguientes: Una variedad siempre será irreducible y estará construida sobre un campo algebraicamente cerrado fijo (que es el caso más sencillo); el concepto más
general de variedad que manejaremos será el de variedad cuasi-proyectiva. Todos los anillos con los
que trabajaremos serán conmutativos con identidad y cualquier homomorfismo de anillos envı́a el 1
en el 1. Un ideal primo (respectivamente maximal) es un ideal p (respectivamente m) en un anillo A
tal que A/p es un dominio entero (respectivamente A/m es un campo). Por lo tanto, necesariamente
los ideales primos y maximales considerados aquı́ son propios.
Los resultados que se encuentren precedidos por una letra griega α sólo se citan y no incluyen
demostración, pues no es nuestro objetivo hacer una obra autocontenida, sino tomar lo que necesitemos y remitir al lector interesado en conocer la demostración a una fuente confiable. Por último
incluimos un Apéndice donde figuran distintos temas empleados en este trabajo que son un poco
especializados.
x
Capı́tulo 1
Variedades Afines
En este primer Capı́tulo establecemos algunos de los resultados y conceptos más importantes
de toda la Geometrı́a Algebraica. En la Sección 1.1 se introducen los conjuntos algebraicos
como los conjuntos de soluciones (ceros o raı́ces) de sistemas de ecuaciones polinomiales
(en n variables con coeficientes en un campo algebraicamente cerrado k ). El primer resultado
importante es el Teorema de la Base de Hilbert, el cual nos garantiza que dicho sistema de
ecuaciones siempre lo podemos suponer finito. Los conjuntos algebraicos nos servirán para
definir la Topologı́a de Zariski en el espacio afı́n
n-dimensional Ank ; ésta es la topologı́a
estándar utilizada en Geometrı́a Algebraica.
En la Sección 1.2 utilizamos la noción topológica de irreducibilidad para definir los objetos
básicos de estudio de este capı́tulo: las variedades algebraicas afines, que no son más que
conjuntos algebraicos irreducibles con la topologı́a de Zariski inducida. En la Sección 1.3 discutimos las propiedades básicas de los conjuntos algebraicos y establecemos la relación con
la teorı́a de ideales, después de lo cual se introduce el célebre Nullstellensatz (término en
alemán que se traduce como “Teorema de los Ceros”) de Hilbert, segundo resultado importante que permite entrever una correspondencia biyectiva entre los conjuntos algebraicos en
An y cierto tipo de ideales en el anillo k[x1 , . . . , xn ].
La Sección 1.4 está dedicada al estudio de las propiedades topológicas de las variedades
afines; iniciando en general con el estudio de los Espacios Topológicos Noetherianos. El
resultado principal de esta sección es: todo conjunto algebraico resulta ser una unión finita
de variedades algebraicas, lo cual justifica el por qué del papel central de las variedades
en nuestro estudio. Finalmente en la Sección 1.5 definimos de manera concisa el concepto
de dimensión de un espacio topológico, y explotamos fuertemente el carácter AlgebraicoGeométrico de las variedades al utilizar resultados importantes de la Teorı́a de la Dimensión,
y aplicarlos tanto al cálculo concreto de la dimensión de algunas variedades especificas, como
a la caracterización completa de conjuntos de variedades de cierta dimensión.
1.1.– Conjuntos Algebraicos y la Topologı́a de Zariski
Sea k un campo algebraicamente cerrado fijo. Definimos el n-espacio afı́n sobre k, denotado por
Ank , o simplemente por An , como el conjunto de todas las n-adas de elementos de k, i.e., An = k n .
La principal diferencia entre An y el espacio vectorial k n es que en An “olvidamos” la estructura
vectorial natural de k n , de modo que ningún punto goce de un papel destacado (al contrario de lo
que ocurre en k n con el vector 0). Un elemento P = (a1 , . . . , an ) ∈ Ank será llamado un punto, y los
ai serán llamados las coordenadas de P .
Interpretaremos a los elementos del anillo A = k[x1 , . . . , xn ] como funciones del n-espacio afı́n al
campo k, definiendo f (P ) := f (a1 , . . . , an ), donde f ∈ k[x1 , . . . , xn ] y P ∈ An . Ası́, si f ∈ A es un
polinomio, podemos hablar del conjunto de ceros de f , a saber Z(f ) := {P ∈ An | f (P ) = 0}. De
1
1.1. Conjuntos Algebraicos y la Topologı́a de Zariski
1. Variedades Afines
manera más general, si T ⊆ k[x1 , . . . , xn ], definimos el conjunto de ceros de T como el conjunto de
los ceros comunes de todos los elementos de T , es decir
Z(T ) := {P ∈ An | ∀f ∈ T : f (P ) = 0}.
Si a es el ideal en A generado por T , entonces Z(T ) = Z(a), pues P ∈ Z(a) ⇒ ∀ f ∈ a : f (P ) = 0 ,
pero como T ⊆ a, entonces ∀ f ∈ T : f (P ) = 0, y ası́ PP
∈ Z(T ). Recı́procamente, dado P ∈ Z(T ),
tomamosPf ∈ a, tenemos que ∃ g1 , . . . , gn ∈ A : f = ni=1 gi hi , donde ∀ i : hi ∈ T , por lo que
f (P ) = ni=1 gi (P )hi (P ) = 0 y P ∈ Z(a).
Definición: Un subconjunto Y de An es un conjunto algebraico si ∃ T ⊆ A : Y = Z(T ).
Aunque en la definición anterior nos hemos permitido trabajar con un número arbitrario de polinomios, a continuación veremos que en realidad todo conjunto algebraico se puede expresar como el
conjunto de ceros comunes de un subconjunto finito de polinomios. Esto se sigue inmediatamente
del famoso Teorema de la Base de Hilbert, el cual enunciamos a continuación.
α Teorema 1.1 (Teorema de la Base de Hilbert). Si R es un anillo noetheriano, entonces
R[ x ] es un anillo noetheriano.
Demostración. Ver [ZS58] Volumen I, página 201 o [Kun85], página 11.
∗
De este importante resultado se sigue inmediatamente (por inducción sobre el número de variables)
que A es un anillo noetheriano, por lo que todo ideal a de A posee un subconjunto finito de generadores f1 , . . . , fm . De esta manera, Z(T ) puede ser expresado como el conjunto de ceros comunes
de un subconjunto finito de polinomios f1 , . . . , fm . También se tiene de estas observaciones que
distintos subconjuntos de A pueden dar lugar al mismo conjunto algebraico.
Proposición 1.2. La unión finita de conjuntos algebraicos es un conjunto algebraico. La intersección arbitraria de conjuntos algebraicos es un conjunto algebraico. El conjunto vacı́o y el
espacio entero son conjuntos algebraicos.
Demostración. Si Y1 = Z(T1 ) y Y2 = Z(T2 ), entonces Y1 ∪ Y2 = Z(T1 T2 ), donde T1 T2 := {f g | f ∈
T1 , g ∈ T2 }. Para ver esto, tomemos P ∈ Y1 ∪ Y2 , entonces P ∈ Y1 o P ∈ Y2 , en particular,
∀ f ∈ T1 , g ∈ T2 se tiene que f (P ) = 0 o g(P ) = 0, por lo tanto f g(P ) = 0 y se sigue que
Y1 ∪ Y2 ⊆ Z(T1 T2 ). Recı́procamente, si P ∈
/ Y1 ∪ Y2 , entonces P ∈
/ Y1 y P ∈
/ Y2 , por lo que
∃ f ∈ T1 , g ∈ T2 tales que f (P ) 6= 0 y g(P ) 6= 0, por lo tanto f g(P ) 6= 0 y P ∈
/ Z(T1 T2 ). Tomando
complementos tenemos que Z(T1 T2 ) ⊆ Y1 ∪ Y2 , por lo que se sigue la igualdad.
A continuación, si Yα = Z(Tα ) es una familia de conjuntos algebraicos, entonces ∩α Yα =
Z(∪α Tα ), pues P ∈ ∩α Z(Tα ) ⇔ ∀α : P ∈ Z(Tα ) ⇔ ∀ f ∈ ∪α Tα : f (P ) = 0 ⇔ P ∈ Z(∪α T );
ası́ ∩α Yα es un conjunto algebraico. Finalmente An = Z(0) y, si α ∈ k ∗ , entonces ∅ = Z(α).
∗
Definición: Definimos la topologı́a de Zariski en An tomando los conjuntos abiertos como los
complementos de los conjuntos algebraicos. De acuerdo a la proposición anterior, esta familia de
conjuntos define una topologı́a en An .
La topologı́a de Zariski (llamada ası́ en honor a Oscar Zariski, pionero de la Geometrı́a Algebraica
sobre campos arbitrarios) es la topologı́a estándar utilizada en Geometrı́a Algebraica, por lo que en
lo subsecuente, cada vez que trabajemos con conceptos topológicos, nos referiremos a esta topologı́a
(a menos que se especifique lo contrario). Notemos que una de las grandes ventajas que tiene esta
topologı́a es que es posible definirla en el conjunto Ank para cualquier campo k. Veamos a continuación
algunos ejemplos concretos.
2
1.2. Irreducibilidad
1. Variedades Afines
1.1 Ejemplo (La topologı́a de Zariski en la lı́nea afı́n A1 ): Tenemos que k[x] es un Dominio
de Ideales Principales (DIP para abreviar), por lo que cualquier conjunto algebraico es el conjunto de
ceros de un solo polinomio.
Como k es algebraicamente cerrado, todo polinomio f se puede escribir
Qn
en la forma f (x) = c i=1 (x − ai ), con c, a1 , . . . , an ∈ k, por lo que se sigue que Z(f ) = {a1 , . . . , an }
es un conjunto finito.
si F = {a1 , . . . , an } ⊂ A1 es un conjunto finito de puntos,
Qn Recı́procamente,
entonces F = Z i=1 (x − ai ) . De estos hechos vemos que los conjuntos algebraicos en A1 son
precisamente los conjuntos finitos (incluyendo al conjunto vacı́o) y el espacio entero. Ası́, la topologı́a
de Zariski en A1 no es más que la topologı́a cofinita. Un hecho importante que hay que notar es
que esta topologı́a en particular no es de Hausdorff.
1.2 Ejemplo: Bajo la identificación natural de A2 con A1 × A1 , se tiene que la topologı́a de Zariski
en A2 no es la topologı́a producto de las topologı́as de Zariski en las dos copias de A1 . Para ver esto,
tenemos que los conjuntos cerrados de A1 × A1 son por definición uniones finitas de intersecciones
arbitrarias de conjuntos de la forma F1 × F2 , donde F1 y F2 son conjuntos cerrados en A1 . Por el
Ejemplo 1.1 conocemos completamente como son los conjuntos cerrados en A1 , ası́ que los conjuntos
cerrados en A1 × A1 son de una de las siguientes formas: ∅, A1 × A1 , conjuntos finitos o productos
de conjuntos finitos con A1 . Si consideramos la diagonal ∆ = Z(y − x) en A2 , vemos que existe un
conjunto cerrado que no es de ninguna de las formas anteriores, por lo que se sigue el resultado.
1.2.– Irreducibilidad
El conjunto algebraico X ⊂ A2 definido por X = Z(x1 x2 ) se puede escribir como la unión de los
dos ejes coordenados X1 = Z(x2 ) y X2 = Z(x1 ), que a su vez son también conjuntos algebraicos.
Sin embargo, X1 y X2 ya no se pueden descomponer en una unión finita de conjuntos algebraicos
estrictamente más pequeños. Lo que haremos a continuación será generalizar esta idea y veremos
que esto se puede hacer completamente en el lenguaje de espacios topológicos.
Definición: Un espacio topológico X es irreducible si no se puede expresar como una unión X =
X1 ∪ X2 de dos subconjuntos propios cerrados. Un subconjunto Y ⊆ X es irreducible si Y es
irreducible como espacio topológico con la topologı́a inducida. El conjunto vacı́o ∅ no es considerado
como un conjunto irreducible.
1.3 Ejemplo: La lı́nea afı́n A1 es irreducible, ya que sus únicos subconjuntos cerrados propios son
finitos, y como k es algebraicamente cerrado, entonces es un conjunto infinito.
Veremos a continuación que los espacios topológicos irreducibles poseen propiedades topológicas
algo “inusuales”, desde el punto de vista de la topologı́a euclidiana clásica, y de paso estableceremos
algunas propiedades que estaremos utilizando a lo largo de nuestro estudio.
1.4 Ejemplo (Algunas propiedades de los espacios topológicos irreducibles):
1 Todo subconjunto abierto no vacı́o de un espacio topológico irreducible es denso e irreducible.
En efecto, sea X un espacio topológico irreducible y A 6= ∅ un subconjunto abierto propio de
X, si A no es irreducible, entonces existen F, G subconjuntos cerrados en X tales que A =
(A ∩ F ) ∪ (A ∩ G). Ya que F ∪ G 6= X, entonces X = Ac ∪ (F ∪ G), lo cual es una contradicción.
Se sigue que A es irreducible.
Ahora sea A ( X un conjunto abierto y tomemos cualquier conjunto abierto B ( X (ambos
distintos del conjunto vacı́o), entonces Ac ∪ B c 6= X, por lo tanto (Ac ∪ B c )c 6= ∅, pero esto dice
que A ∩ B 6= ∅ y por lo tanto A es denso en X.
3
1.2. Irreducibilidad
1. Variedades Afines
2 Si Y es un subconjunto de un espacio topológico X, entonces Y es irreducible si, y solo si, Y es
irreducible.
Necesidad. Supongamos que Y no es irreducible, entonces existen F, G subconjuntos cerrados en
X tales que Y = A ∪ B, con A = F ∩ Y y B = G ∩ Y ; necesariamente A ∩ Y 6= ∅ y B ∩ Y 6= ∅
(de lo contrario, si A ∩ Y = ∅ entonces Y ⊂ B, pero B es cerrado y luego B ⊃ Y , lo cual
contradice la hipótesis inicial; el caso B ∩ Y = ∅ se trata de manera totalmente análoga), luego
Y = (A ∩ Y ) ∪ (B ∩ Y ), pero esto es una contradicción. De esta manera concluimos que Y es
irreducible.
Suficiencia. Sea Y = A ∪ B, con A = A0 ∩ Y , B = B 0 ∩ Y , siendo A0 y B 0 subconjuntos cerrados
de X. Tenemos que Y es cerrado en X, luego Y ∩ A0 y Y ∩ B 0 son subconjuntos cerrados en X,
y se tiene que Y = A ∪ B ⊆ (Y ∩ A0 ) ∪ (Y ∩ B 0 ), de donde Y ⊆ (Y ∩ (A0 ∪ B 0 )). Se sigue que
Y = (Y ∩ A0 ) ∪ (Y ∩ B 0 ), pero Y es irreducible, por lo que Y ∩ A0 = Y o Y ∩ B 0 = Y , y cualquiera
que sea el caso, tenemos Y = A o Y = B. Por lo tanto Y es irreducible.
Definición: Una variedad algebraica afı́n (o simplemente variedad afı́n) es un conjunto cerrado
irreducible en An . Un subconjunto abierto de una variedad afı́n es una variedad cuasi-afı́n .
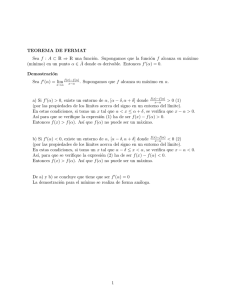
1.5 Ejemplo (Curvas algebraicas interesantes): Antes de cerrar la sección y adelantándonos
un poco a lo que viene, queremos ofrecer un conjunto de ejemplos concretos de variedades algebraicas afines con polinomios de tercer grado que tienen comportamientos interesantes (avisando
que posteriormente volveremos a ver a algunas de ellas). En el Ejemplo 1.6 hallaremos que los conjuntos del tipo Z(f ), donde f ∈ k[x, y] es irreducible, son variedades algebraicas llamadas curvas
algebraicas (o curvas planas). En la Figura 1.1 podemos observar 3 ejemplos de curvas algebraicas
que presentan fenómenos muy interesantes. Esto nos permite ver que las curvas algebraicas pueden
tener picos, cortarse a ellas mismas, o ser disconexas 1 .
A2
(a)
A2
(b)
A2
(c)
Figura 1.1: (a) Curva cuspidal y 2 = x3 . (b) Folium Cartesii y 2 = x2 (x + 1). (c) La curva y 2 = x(x2 − 1).
Probemos que los polinomios que las definen son irreducibles. Para y 2 − x3 ∈ k[x, y], supongamos
que es producto de dos polinomios, i.e., y 2 − x3 = f1 f2 . Es fácil ver que si el grado en y de uno de
1
Disconexas con respecto a la noción que tenemos de la topologı́a Euclidiana, pues todo subconjunto irreducible
Y de un espacio topológico X es automáticamente conexo, ya que si A, B forman una disconexión de Y , entonces es
fácil ver que Y = (Ac ∩ Y ) ∪ (B c ∩ Y ) es una descomposición en conjuntos cerrados no vacı́os de Y .
4
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
los factores es 2, el otro ha de ser constante. Supongamos pues que fi = gi (x)y + hi (x), i = 1, 2.
Multiplicando e igualando los coeficientes obtenemos que
g1 g2 = 1,
g1 h2 + g2 h1 = 0,
h1 h2 = −x3 .
De la primera igualdad tenemos que g1 y g2 son constantes, de la segunda que h1 = αh2 para cierto
α ∈ k, y de la tercera que αh22 = −x3 , lo cual es imposible. Concluimos que y 2 − x3 es irreducible.
Para demostrar la irreducibilidad de los dos polinomios restantes, utilizaremos el ya conocido criterio
de Eisenstein (ver [Hun74], página 164). Veamos primero al polinomio y 2 − x2 (x + 1) en el anillo
k[ x ][ y ]. Aquı́, éste cumple que todos sus coeficientes salvo el coeficiente lı́der son divisibles entre
el polinomio irreducible (y por lo tanto primo) x + 1, y también que el término independiente no es
divisible entre (x + 1)2 . Por lo tanto tenemos que es irreducible. Para el polinomio y 2 − x(x2 − 1)
utilizamos el polinomio primo x para aplicar el criterio. El que este conjunto sea irreducible no
resultaba tan obvio de la imagen bosquejada en la Figura 1.1 (c).
Las variedades afines y cuasi-afines serán nuestros primeros objetos de estudio, pero antes de
seguir avanzando, necesitaremos explorar con más profundidad la relación que existe entre los subconjuntos de An y los ideales del anillo A, lo cual haremos en la siguiente sección.
1.3.– El Nullstellensatz de Hilbert
El Teorema Fundamental del Álgebra de Gauss establece el enlace básico entre el Álgebra y la
Geometrı́a: nos dice que un polinomio en una variable sobre C (un objeto algebraico) está determinado salvo un múltiplo escalar por el conjunto de sus raı́ces (un objeto geométrico). El Nullstellensatz
de Hilbert (o Teorema de los Ceros de Hilbert) extiende este enlace a ciertos ideales de polinomios
en varias variables. Es una consecuencia formal del Teorema Fundamental del Álgebra en el sentido
de que se cumple para cualquier campo algebraicamente cerrado.
De manera más precisa, tomemos k un campo algebraicamente cerrado, entonces se cumple que
todo ideal propio de k[x] se puede expresar de manera única (salvo el orden) como la intersección de
un número finito de ideales primarios. Más aún, todo ideal primario o es el ideal h0i, o es de la forma
hpn i, donde p ∈ k[x] es irreducible y n ∈ N, cumpliéndose además hpn i = hpinQ(para una discusión
más amplia sobre este tema, vea [Hun74], página 141). De esta manera, si f = c ni=1 (x−αi )mi ∈ k[x]
es cualquier polinomio no constante, se tiene que:
v
un
n
n q
\
\
p
u\
hf i = t h(x − αi )mi i =
hx − αi imi =
hx − αi i = h(x − α1 ) · · · · · (x − αn )i .
i=1
i=1
i=1
Claramente se ve de la relación anterior que el ideal hf i es radical si, y solo si, f no tiene raı́ces
múltiples. El Teorema Fundamental es equivalente al hecho de que un ideal radical en k[x] está completamente determinado por el conjunto de ceros de un generador. El Nullstellensatz de Hilbert dice
que un ideal radical I ⊆ A se encuentra completamente determinado por su conjunto de ceros Z(I),
y es un teorema muy importante en Geometrı́a Algebraica.
Definición: Sea Y ⊆ An , definimos el ideal de Y en k[x1 , . . . , xn ] como
I(Y ) := {f ∈ k[x1 , . . . , xn ] | ∀ P ∈ Y : f (P ) = 0}.
Ahora contamos con una función Z que envı́a subconjuntos de A en conjuntos algebraicos, y una
función I que envı́a subconjuntos de An en ideales de A. Se resumen algunas de sus propiedades en
la siguiente proposición.
5
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
Proposición 1.3.
a) Si T1 ⊆ T2 son subconjuntos de k[x1 , . . . , xn ], entonces Z(T1 ) ⊇ Z(T2 ).
b) Si Y1 ⊆ Y2 son subconjuntos de An , entonces I(Y1 ) ⊇ I(Y2 ).
c) ∀ Y1 , Y2 ⊆ An : I(Y1 ∪ Y2 ) = I(Y1 ) ∩ I(Y2 ).
√
d ) Si a ⊆ A es un ideal, entonces I(Z(a)) = a.
e) ∀ Y ⊆ An : Z(I(Y )) = Y , la cerradura de Y .
f ) Si Y1 , Y2 ⊆ An son subconjuntos algebraicos, entonces I(Y1 ∩ Y2 ) =
p
I(Y1 ) + I(Y2 ).
Demostración. Las afirmaciones a), b) y c) son fáciles de ver. La primer afirmación la podemos
interpretar como el hecho de que a mayor número de ecuaciones, tenemos menor número de
soluciones. De manera precisa, si x ∈ Z(T2 ), entonces ∀ f ∈ T2 : f (x) = 0; en particular
T1 ⊆ T2 ⇒ ∀ f ∈ T1 : f (x) = 0, lo cual dice que x ∈ T1 . La demostración de b) utiliza la
misma idea.
La cuarta afirmación es una consecuencia directa del Nullstellensatz de Hilbert (Teorema de los
ceros de Hilbert), mencionado a continuación, ya que el radical de un ideal a se puede caracterizar
como
\
√
a :=
p = {f ∈ A | ∃ r > 0 : f r ∈ a}.
p primo
p⊃a
√
Utilizando el resultado anterior, la inclusión a ⊆ I(Z(a)) es obvia.
Para probar e), notemos que Y ⊆ Z(I(Y )), el cuál es un conjunto cerrado, luego Y ⊆ Z(I(Y )).
Por otro lado, sea W cualquier conjunto cerrado que contenga a Y , entonces ∃ a ideal de A tal
que W = Z(a). Por lo tanto Z(a) ⊇ Y y I(Z(a)) ⊆ I(Y ). Pero ciertamente a ⊆ I(Z(a)), entonces
W = Z(a) ⊇ Z(I(Y )). Ası́ Z(I(Y )) = Y .
Por último, notemos que en f ) se rompe el buen comportamiento de las operaciones de conjuntos
observado en c). Para demostrar este punto, observemos que el ideal generado por I(Y1 ) ∪ I(Y2 )
es I(Y1 ) + I(Y2 ), ası́ se tiene que Z(I(Y1 ) ∪ I(Y2 )) = Z(I(Y1 ) + I(Y2 )), pero como Y1 y Y2 son
conjuntos algebraicos, entonces son cerrados ası́ Y1 = Z(I(Y1 )) y Y2 = Z(I(Y2 )), por lo tanto
Y1 ∩ Y2 = Z(I(Y1 )) ∩ Z(I(Y
p 2 )) = Z(I(Y1 ) ∪ I(Y2 )) = Z(I(Y1 ) + I(Y2 )), y finalmente, I(Y1 ∩ Y2 ) =
I(Z(I(Y1 ) + I(Y2 ))) = I(Y1 ) + I(Y2 ).
∗
A continuación enunciamos el resultado más importante de esta sección, el cual nos permite
establecer una conexión precisa entre los conjuntos algebraicos en An y los ideales del anillo A =
k[x1 , . . . , xn ], llevándonos también a nuestra primera conexión entre la geometrı́a y el álgebra.
α Teorema 1.4 (El Nullstellensatz de Hilbert). Sea k un campo algebraicamente cerrado,
sea a un ideal de A y f ∈ k[x1 , . . . , xn ] un polinomio que se anula en todos los puntos de Z(a).
Entonces ∃ n ∈ N : f n ∈ a.
Demostración. Ver [Kun85], página 16 o [Hun74], página 412.
∗
Junto con el siguiente corolario, se ofrece una caracterización algebraica de las variedades afines.
Corolario 1.5. Existe una correspondencia uno a uno que invierte el orden de las inclusiones
entre los conjuntos algebraicos de An y los ideales radicales en A, dada por
Y 7→ I(Y ) y a 7→ Z(a).
Más aún, un conjunto algebraico es irreducible si, y solo si, su ideal asociado es primo.
6
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
Demostración. Solo la última parte es nueva. Si Y es irreducible, sea f g ∈ I(Y ), entonces Y ⊆
Z(f g) = Z(f ) ∪ Z(g). Ası́ Y = (Y ∩ Z(f )) ∪ (Y ∩ Z(g)), siendo ambos subconjuntos cerrados en Y .
Ya que Y es irreducible, tenemos ya sea Y = Y ∩ Z(f ), en cuyo caso Y ⊆ Z(f ), o Y = Y ∩ Z(g),
que implica Y ⊆ Z(g). Ası́ se tiene f ∈ I(Y ) o g ∈ I(Y ), y de esta manera el ideal I(Y ) es primo.
Recı́procamente, sea p un ideal primo, y supongamos que Z(p) = Y1 ∪ Y2 . Entonces p = I(Y1 ) ∩
I(Y2 ), y como p es primo, se tiene que p = I(Y1 ) o p = I(Y2 ) (ver [AM69], página 8). Luego
Z(p) = Y1 o Z(p) = Y2 , por lo que concluimos que Z(p) es irreducible.
∗
1.6 Ejemplo: An es una variedad algebraica, pues I(An ) = h0i es un ideal primo. Si f ∈ A =
k[x1 , . . . , xn ] es un polinomio irreducible, entonces Z(f ) es una variedad algebraica (pues A es un
Dominio de Factorización Única, abreviado DFU) llamada superficie si n = 3, o hipersuperficie si
n > 3. Como un caso particular, si f ∈ k[x, y] es un polinomio irreducible de grado d, decimos que
Y = Z(f ) es una curva afı́n plana de grado d, definida por la ecuación f (x, y) = 0.
1.7 Ejemplo: Un ideal maximal m de A corresponde a un subconjunto cerrado minimal de An , que
debe ser un punto (pues los puntos no contienen ningún subconjunto cerrado propio), digamos P =
(a1 , . . . , an ). Esto muestra que todo ideal maximal de A es de la forma mP = hx1 − a1 , . . . , xn − an i
para algunos a1 , . . . , an ∈ k. En otras palabras, el Nullstellensatz de Hilbert identifica el conjunto
de ideales maximales2 del anillo k[x1 , . . . , xn ] con los puntos del espacio afı́n An .
Observación 1.1: Si nuestro campo no es algebraicamente cerrado, puede suceder que los resultados anteriores no se cumplan, lo cual parece decirnos que la Geometrı́a Algebraica sobre este tipo de
campos es más delicada y complicada. Daremos a continuación algunos ejemplos en donde k = R.
a) La curva x2 + y 2 + 1 = 0 en A2R es el conjunto vacı́o. Por lo tanto el inciso d) de la Proposición
1.3 es falso.
b) Sabemos que R[ x ]/ x2 + 1 ∼
= C, por lo que el ideal x2 + 1 debe ser maximal, pero éste no es
de la forma establecida en el Ejemplo 1.7.
Más aún,todo ideal maximal en el anillo R[x] se puede
expresar como hx − ai, a ∈ R ó como x2 + ax + b ; donde a, b ∈ R son tales que a2 − 4b < 0.
c) Tomemos (x2 − 1)2 + y 2 = f (x, y) ∈ R[x, y], se tiene que f (x, y) = [(x2 − 1) + iy][(x2 − 1) − iy]
es una factorización de f en polinomios irreducibles en C[x, y], y ya que tanto C[x, y] como
R[x, y] son DFU y R[x, y] ⊂ C[x, y], obtenemos que f es irreducible en R[x, y]. Sin embargo,
Z(f ) = {(1, 0)} ∪ {(−1, 0)} = Z(x − 1, y) ∪ Z(x + 1, y), el cual no es reducible, por lo que la
parte final del Corolario 1.5 no se cumple.
Una caracterı́stica de las matemáticas modernas es que, para entender ciertos objetos, se deben
estudiar las clases naturales de funciones que aparecen entre ellos. Tal como lo discutimos al principio
del capı́tulo, dado f ∈ A, podemos definir de manera natural una función de An a A1 = k, (denotada
también por f y llamada frecuentemente función polinomial) por P = (a1 , . . . , an ) 7→ f (a1 , . . . , an ).
Las funciones xi : An −→ k se conocen frecuentemente por funciones coordenadas en An . Ya
que k es un campo infinito, la correspondencia que a cada f ∈ A le asocia la función f : An −→ k
discutida anteriormente, es biyectiva, tal y como se demuestra a continuación (de hecho, probaremos
algo ligeramente más general).
Proposición 1.6. Sea k un campo infinito, si f ∈ k[x1 , . . . , xn ] es tal que ∀ (a1 , . . . , an ) ∈ An :
f (a1 , . . . , an ) = 0, entonces f = 0.
2
El conjunto de todos los ideales primos de un anillo A se conoce como el espectro de A (denotado por Spec A).
El subconjunto de Spec A que consta de todos los ideales maximales de A se conoce como el espectro maximal de A
(denotado por max SpecA).
7
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
Demostración. Procederemos por inducción sobre el número de variables n. Si n = 1, la proposición es trivial, pues todo polinomio f ∈ k[ x ] tiene a lo sumo un número finito de raı́ces. Supongamos
pues que n > 1 y que se verifica la hipótesis para k = n−1. Tomemos (a1 , . . . , an ) ∈ k n y ordenamos
al polinomio f (x1 , . . . , xn−1 , an ) según las potencias crecientes del elemento an como sigue:
f (x1 , . . . , xn−1 , an ) = f0 (x1 , . . . , xn−1 ) + f1 (x1 , . . . , xn−1 )an + · · · + fr (x0 , . . . , xn−1 )arn .
P
Tomando a1 , . . . , an−1 ∈ k vemos que el polinomio f (a1 , . . . , an−1 , xn ) = sj=0 fj (a1 , . . . , an−1 )xjn
considerado como un polinomio de una sola variable se anula sobre todo el campo k, el cual es
infinito. Se sigue que este es el polinomio nulo. En consecuencia ∀ i ∈ {0, . . . , s} : fi (a1 , . . . , an ) = 0.
Ya que esto es verdadero para todos los (a1 , . . . , an−1 ) ∈ k n−1 , podemos aplicar la hipótesis de
inducción a f0 , . . . , fr , los cuales resultan ser nulos. Se sigue de esta forma que f = 0.
∗
Sea Ω la k-álgebra de todas las funciones de An a k. Entonces, fácilmente se ve que la subálgebra
de Ω generada por las funciones coordenadas {xi }ni=1 , es isomorfa al anillo de polinomios A. Esta
subalgebra se llama el anillo coordenado de An (es claro de donde viene el nombre).
A continuación sea Y ⊂ An un conjunto algebraico y sean xi |Y , i = 1, . . . , n las restricciones
de las funciones coordenadas de An a Y . Lo que deseamos ahora es caracterizar la k-álgebra A(Y )
generada por estas restricciones dentro de la k-álgebra de todas las funciones de Y a k. Notemos
que existe un homomorfismo ψ : A −→ A(Y ) dado por xi 7→ xi |Y , i = 1, . . . , n. Además, si
observamos que cualquier elemento del campo k define una función constante en Y , tenemos que
ψ es un homomorfismo de k-álgebras, el cual por definición es suprayectivo (ver el Apéndice A).
Tenemos que Ker ψ = I(Y ), por lo que A(Y ) ∼
= A/I(Y ). Formalizamos estas observaciones en la
siguiente definición.
Definición: Si Y ⊆ An es un conjunto algebraico, definimos el anillo coordenado afı́n de Y ,
denotado por A(Y ), como A/I(Y ).
1.8 Ejemplo: A continuación analizaremos otra estrecha relación entre el Álgebra y la Geometrı́a.
Se tiene que una k-álgebra B es isomorfa al anillo coordenado de algún subconjunto algebraico de
An , para algún n, si, y solo si, B es una k-álgebra finitamente generada sin elementos nilpotentes
distintos de 0 3 . Para demostrar esto nos auxiliaremos de la siguiente:
Proposición 1.7. Un ideal a de un anillo R es radical si, y sólo si, R/a no contiene elementos
nilpotentes distintos de 0.
Demostración.
√
Necesidad: Supongamos que R/a no tiene elementos nilpotentes distintos de 0 y sea√x ∈ a.
Entonces ∃ n ∈ N : xn ∈ a, pero esto implica que 0 = xn = (x)n , ası́ x ∈ a, por lo tanto a ⊂ a.
n
Suficiencia: Sea a un ideal radical y tomemos x ∈ R/a
√ nilpotente, entonces ∃ n ∈ N : (x) = 0, pero
n
esto significa que x ∈ a, y como tenemos que x ∈ a ⊂ a, entonces x = 0.
∗
Volvamos a la demostración del ejemplo inicial. Probaremos primero la necesidad. Sea B una kálgebra finitamente generada sin elementos nilpotentes no nulos, sea {α1 , . . . , αn } un conjunto de
generadores para B y definimos el mapeo
ψ : k[x1 , . . . , xn ] −→ B
f (x1 , . . . , xn ) 7→ f (α1 , . . . , αn )
3
Un anillo que no posee elementos nilpotentes distintos de cero se llama reducido.
8
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
el cual claramente es un homomorfismo de k-álgebras suprayectivo. Ası́ k[x1 , . . . , xn ]/Ker ψ ∼
=B y
por la Proposición 1.7, se tiene que Ker ψ es un ideal radical, por lo que define una única variedad
Y = Z(Ker ψ) ⊆ An .
∼
Ahora, probemos la suficiencia. Supongamos que existe un isomorfismo ψ : A(Y ) −→ B, donde
A(Y ) es el anillo coordenado correspondiente al conjunto algebraico Y ⊆ An , entonces como Y es un
subconjunto cerrado del n-espacio afı́n, I(Y ) es radical; por la Proposición 1.7, B no tiene elementos
nilpotentes no nulos, además A(Y ) es finitamente generada (por los elementos x1 , . . . , xn ), luego,
por el isomorfismo existente, B es generada por las imágenes de los generadores de A(Y ) y se sigue
el resultado.
A continuación presentamos una aplicación concreta de lo anterior y trabajaremos con los anillos
coordenados de algunas curvas afines, para lo cual haremos uso del siguiente “algoritmo de la
división”.
P
j
Proposición 1.8. Sea R un anillo conmutativo con identidad y g(x) = m
j=0 aj x ∈ R[ x ] tal
que am ∈ R∗ , entonces (∀f (x) ∈ R[ x ]) (∃ q(x), r(x) ∈ R[ x ]) : f (x) = q(x)g(x) + r(x), donde
r(x) = 0 ó deg r < deg g.
Demostración. La prueba será por inducción sobre deg f . Si deg f < deg g,Pentonces tomamos
j
q(x) = 0 y r(x) = f (x) y hemos terminado. Si deg f ≥ deg g, digamos g(x) = m
j=0 aj x y f (x) =
Pn
j
−1
n−m , y r (x) = f (x)−q (x)g(x), luego d = deg r < deg f (ya
1
1
1
1
j=0 bj x , tomamos q1 (x) = am bn x
que necesariamente el término lı́der de f (x) se anula con el de q1 (x)g(x), pudiendo ocurrir también
algunas cancelaciones más de términos).
En este punto vemos que si r1 (x) = 0 ó d1 < m, entonces hemos terminado, de lo contrario
P 1 (1) j
repetimos el proceso con r1 (x) = dj=0
bj x en el lugar de f (x) (i.e., multiplicamos a g(x) por
(1)
d1 −m y tomamos r (x) = r (x) − q (x)g(x)), donde d = deg r < d . Si d = 0
q2 (x) = a−1
2
1
2
2
2
1
2
m bd1 x
ó deg r2 < m, despejando tenemos f (x) = [q1 (x) + q2 (x)]g(x) + r2 (x), de lo contrario, continuamos
el procedimiento hasta obtener un polinomio rs (x) = rs−1 (x) − qs (x)g(x) con rs (x) = 0 ó ds =deg
rs < m (el proceso es finito pues m lo es), de donde al hacer sustituciones regresivas, se sigue el
resultado.
∗
1.9 Ejemplo (Los anillos coordenados afines de la parábola y de la hipérbola):
1. Sea Y la curva afı́n y = x2 (i.e., Y es el conjunto de ceros del polinomio f = y − x2 ), la cual
representa a una
cónicabien conocida: una parábola. Veremos que el anillo coordenado de Y
A(Y ) = k[x, y]/ y − x2 es isomorfo a un anillo de polinomios en una variable sobre k.
Para ver esto, definimos ϕ : k[x, y] −→ k[ t ] por ϕ(f (x, y)) = f (t, t2 ) (i.e., x 7→ t, y 7→ t2 ), y
fácilmente verificamos que ϕ es un homomorfismo
A continuación
P de anillos.
Pm demostraremos
j , entonces ∃ g =
j ∈ k[x, y]
que es suprayectivo; si f ∈ k[t] es tal que f = m
a
t
j=0 j j=0 aj x
tal que ϕ(g) = f . Por último, confirmemos que Ker ϕ = y − x2 . Sea f ∈ y − x2 , entonces
∃ h ∈ k[x, y] tal que f = h(y − x2 ), ası́ ϕ(f ) = ϕ(h(y − x2 )) = 0, por lo tanto y − x2 ⊆ Ker ϕ.
Recı́procamente, sea f ∈ Ker ϕ. Veamos el anillo k[x, y] como k[ x ][ y ], en este anillo, y − x2
tiene coeficiente lı́der 1 en y, ası́ por la Proposición 1.8, ∃ q, r ∈ k[ x ][ y ] : f
= q(y − x2 ) + r,
dónde r = 0 ó deg r = 0 (en cuyo caso r ∈ k[ x ]); si r = 0, entonces f ∈ y − x2 y hemos
terminado, si
r 6= 0, entonces aplicando el homomorfismo
ϕ obtenemos que 0 = r(t), luego
2
2
r = 0 y f ∈ y − x , por
lo tanto
Ker ϕ ⊆ y − x y tenemos que ϕ induce un isomorfismo
entre los anillos k[x, y]/ y − x2 y k[ t ], lo cual termina la prueba.
9
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
2. Ahora consideremos Z la curva xy = 1, la cual representa a otra cónica bien conocida: una
hipérbola. En este caso veremos que A(Z) = k[x, y]/ hxy − 1i no es isomorfo a un anillo de
polinomios en una variable sobre k.
∼
La prueba procederá por contradicción. Supongamos que existe un isomorfismo ϕ : A(Z) −→
k [ t ], dónde A(Z) = k[x, y]/ hxy − 1i = k[x, y] y sean f (t) = ϕ(x) y g(t) = ϕ(y), entonces
tenemos que 1 = ϕ(1) = ϕ(xy) = ϕ(x)ϕ(y) = f (t)g(t), luego f (t), g(t) ∈ k. Ya que los
elementos x, y generan la k-álgebra A(Z), tenemos que ∀ f ∈ A(Z) : ϕ(f ) ∈ k, luego, ϕ no
puede ser suprayectivo. Esto contradice nuestra suposición inicial, y concluimos ası́ que dicho
isomorfismo no existe.
Observación 1.2: Notemos que el anillo k[x, y]/ hxy − 1i = k[x, y] es isomorfo al anillo k[u, u−1 ]
(llamado el anillo de polinomios de Laurent), vı́a el homomorfismo ψ : k[x, y] −→ k[u, u−1 ] dado
por x 7→ u, y 7→ u−1 , cuyo homomorfismo inverso es ψ −1 : k[u, u−1 ] −→ k[x, y], dado por u 7→ x.
Será útil tener en mente este resultado, pues lo utilizaremos posteriormente.
En el ejemplo anterior, es interesante ver que el anillo coordenado de la parábola Y = Z(y − x2 ) es
isomorfo al anillo coordenado de la lı́nea afı́n A1 , pues ambos son k[ t ]. Más adelante (Capı́tulo 3)
veremos que este hecho tiene un significado más profundo del que pudiese aparentar a simple vista.
1.10 Ejemplo (Anillos coordenados afines de las curvas cónicas irreducibles en A2 ):
Sea f (x, y) ∈ k[x, y] un polinomio irreducible de grado dos (char k 6= 2). Si W=Z(f ), probaremos
que A(W ) es isomorfo a A(Y ) ó es isomorfo a A(Z). Más aún, hallaremos una condición suficiente
para saber cuando es isomorfo a cada uno de estos anillos.
Escribamos a f de la forma f (x, y) = ax2 + bxy + cy 2 + L(x, y), donde a, b, c no son todos cero y
L(x, y) es un polinomio lineal. Definimos δ(f ) := b2 − 4ac. La prueba consistirá de tres pasos.
1. La condición de que δ(f ) = 0 ó δ(f ) 6= 0 es estable (i.e., no se altera) al efectuar cualquiera
de las siguientes operaciones en f :
a) f 7→ uf , donde u ∈ k ∗ (multiplicación por una unidad).
Tenemos que δ(uf ) = (ub)2 − 4(ua)(uc) = u2 δ(f ).
b) f 7→ f (X, Y ), donde X := x + α, Y := y + β, con α, β ∈ k ∗ (traslación de coordenadas).
Esto es fácil de ver pues f (X, Y ) = aX 2 + bXY + cY 2 + L0 (X, Y ), donde L0 (X, Y ) es un
polinomio lineal, ası́ δ(f (x, y)) = δ(f (X, Y )).
c) f 7→ f (X, Y ), donde (X, Y ) = (x, y)A, A ∈ GL2 (k) (transformación lineal).
Nuevamente, f (X, Y ) = aX 2 + bXY + cY 2 + L0 (X, Y ), donde L0 (X, Y ) es un polinomio lineal,
y ya que δ(f (X, Y )) solo depende de los términos de grado 2, nos enfocaremos nada más en
ellos. Notemos que
2a b
x
2
2
−1
ax + bxy + cy = 2 (x, y)
.
b 2c
y
b
Haciendo B = 2a
b 2c , tenemos que δ(f ) = −Det B. Ası́, al efectuar el cambio de variables
(x, y) 7→ (X, Y ) = (x, y)A (para A ∈ GL2 (k)), tenemos que
aX 2 + bXY + cY 2 = 2−1 (x, y)AB[(x, y)A]t = 2−1 (x, y)(ABAt )(x, y)t ,
de donde se sigue que δ(f (X, Y )) = −2−1 Det2 (A)δ(f (x, y)).
10
1.3. El Nullstellensatz de Hilbert
1. Variedades Afines
2. Utilizando las operaciones anteriores, cualquier polinomio irreducible de grado dos f (x, y) se
puede transformar en uno de los siguientes polinomios:
a) Cuando δ(f ) = 0.
Ya que k es un campo algebraicamente cerrado y como b2 = 4ac, tenemos que
√
√
f (x, y) = ax2 + bxy + cy 2 + L(x, y) = ( ax + cy)2 + L(x, y).
A continuación, sea i ∈ k un elemento tal que i2 = −1 (nuevamente, existe pues k es al√
√
gebraicamente cerrado) y efectuamos el cambio de variables dado por X = i( ax + cy),
Y = L(x, y). Este cambio es una composición de las operaciones a) y c) del punto anterior.
Ası́, f (x, y) se puede transformar en f (X, Y ) = Y − X 2
b) Cuando δ(f ) 6= 0.
Efectuamos la siguiente manipulación algebraica:
#
"
2
c 2
b2 2
b
2
2
f (x, y) = ax + bxy + cy + L(x, y) = a x + y + y − 2 y + L(x, y)
2a
a
4a
!2
p
2
2
√
√
i δ(f )
b
ab
δ(f ) 2
√ y
=a x+ y −
ax +
y + L(x, y) =
y +
+L(x, y)
2a
4a
2a
2 a
!
!
p
p
√
√
√
√
δ(f )
δ(f )
ab
ab
ax +
y− √ y
ax +
y + √ y + L(x, y).
=
2a
2a
2 a
2 a
Definimos el cambio de variables dado por
p
√
b − δ(f )
√
X = ax +
y,
2 a
Y =
√
p
b + δ(f )
√
ax +
y,
2 a
la cual es una operación del tipo c). Por lo tanto, tenemos que f (X, Y ) = XY +dX +eY +f =
(X + e)(Y + d) − de + f , aplicando nuevamente una transformación del tipo b), obtenemos
f (X 0 , Y 0 ) = X 0 Y 0 − de + f . A continuación, ya que f es irreducible, tenemos que −de + f 6= 0,
por lo tanto ∃ t ∈ k ∗ : t(−de + f ) = −1. Aplicando una transformación del tipo a), obtenemos
tf (X 0 , Y 0 ) = (tX 0 )Y 0 − 1. Finalmente, aplicamos la transformación del tipo c) X 00 = −tX 0 ,
Y 00 = −Y 0 , obtenemos el resultado final f (X 00 , Y 00 ) = X 00 Y 00 − 1.
3. Si f ∈ k[x, y] es un polinomio irreducible de grado dos, entonces el anillo k[x, y]/ hf (x, y)i es
estable (salvo isomorfismo) bajo las operaciones definidas en el punto 1.
a) Multiplicación por una unidad u ∈ k ∗ .
Se tiene que k[x, y]/ huf i = k[x, y]/ hf i.
b) Traslación de coordenadas X = x + α, Y = y + β.
Es fácil ver que el homomorfismo ψ : k[x, y]/ hf (X, Y )i −→ k[x, y]/ hf (x, y)i dado por g(x, y)+
f (X, Y ) 7→ g(x − α, y − β) + f (x, y) es un isomorfismo.
c) Transformación lineal por A ∈ GL2 (k), (X, Y ) = (x, y)A.
Tenemos que el homomorfismo ψ : k[x, y]/ hf (X, Y )i −→ k[x, y]/ hf (x, y)i dado por g(x, y) +
f (X, Y ) 7→ g((x, y)A−1 ) + f (x, y) es un isomorfismo.
11
1.4. Propiedades Topológicas
1. Variedades Afines
Concluimos que todo polinomio irreducible f (x, y) ∈ k[x, y] de grado 2 se puede transformar en un
polinomio de la forma y − x2 si δf = 0, y en un polinomio de la forma xy − 1 si δ(f ) 6= 0. El anillo
coordenado k[x, y]/ hf i es estable bajo esta transformación. Por lo tanto, el anillo coordenado A(W )
de cualquier cónica irreducible W = Z(f ) es isomorfo a k[ x ] = A(Y ) ó a k[x, x−1 ] = A(Z).
1.4.– Propiedades Topológicas
A continuación estudiaremos la topologı́a de nuestras variedades. Para hacerlo introducimos una
clase importante de espacios topológicos, la cual incluirá a nuestras variedades afines.
Definición: Sea X un conjunto no vacı́o. Se dice que una cadena descendente de subconjuntos
Y1 ⊇ Y2 ⊇ · · · (respectivamente una cadena ascendente Y1 ⊆ Y2 ⊆ · · · ) es estacionaria si ∃ r ∈
N : Yr = Yr+1 = · · · . El conjunto X satisface la condición de cadena descendente si toda cadena
descendente de subconjuntos es estacionaria. X satisface la condición de cadena ascendente si toda
cadena ascendente de subconjuntos es estacionaria.
Definición: Un espacio topológico X se dice noetheriano (de Emmy Noether ) si satisface la condición de cadena descendente para subconjuntos cerrados.
1.11 Ejemplo: Gracias a la Topologı́a de Zariski, An es un espacio topológico noetheriano. De
hecho, si Y1 ⊇ Y2 ⊇ · · · es una cadena descendente de subconjuntos cerrados, entonces I(Y1 ) ⊆
I(Y2 ) ⊆ · · · es una cadena ascendente de ideales en A. Ya que A es un anillo noetheriano, esta
cadena de ideales es estacionaria. Pero se tiene que ∀ j : Yj = Z(I(Yj )), por lo que la cadena
original Y1 ⊇ Y2 ⊇ · · · también es estacionaria.
Proposición 1.9. Sea X un espacio topológico. Entonces las siguientes condiciones son equivalentes.
a) X es noetheriano;
b) toda familia no vacı́a de subconjuntos cerrados tiene un elemento minimal;
c) X satisface la condición de cadena ascendente para conjuntos abiertos;
d ) toda familia no vacı́a de subconjuntos abiertos tiene un elemento maximal.
Demostración.
a) ⇒ b). Supongamos que X es noetheriano y sea S una familia no vacı́a de subconjuntos cerrados de
X, entonces existe un conjunto Y1 ∈ S. Si S no posee elemento minimal, entonces (∀ Y ∈ S) (∃ Y 0 ∈
S) : Y ) Y 0 . Por el axioma de elección, para cada Y en S podemos elegir un Y 0 que cumpla
dicha caracterı́stica. Esta elección define una función f : S −→ S dada por Y 7→ Y 0 . El Teorema
de la recursión (Ver [Hun74], página 10) establece que si S es un conjunto, Y ∈ S y tenemos una
función fn : S −→ S para cada n ∈ N, entonces existe una única sucesión {Yn }n∈N tal que Y1 = Y
y ∀ n > 1 : Yn+1 = fn (Yn ). Entonces si tomamos fn = f para toda n ∈ N, existe una sucesión
{Yn }n∈N tal que
Y1 = Y y Yn+1 = f (Yn ) = Yn0
por lo tanto, hemos construido una sucesión {Yn }n∈N que cumple Y1 ) Y2 ) · · · , pero esto es una
contradicción. Luego, S debe tener un elemento minimal.
b) ⇒ c). Tomemos U1 ⊆ U2 ⊆ · · · una cadena ascendente de subconjuntos abiertos de X. Entonces
{Uic } es una familia no vacı́a de subconjuntos cerrados, la cual tiene un elemento minimal, digamos
12
1.4. Propiedades Topológicas
1. Variedades Afines
c . Ası́, ∀ i ≥ m : U c ⊇ U c ; además U c ⊆ U c por la condición de minimalidad, luego ∀i ≥ m :
Um
m
m
i
i
c , y esto implica que la cadena original U ⊆ U ⊆ · · · es estacionaria.
Uic = Um
1
2
c) ⇒ d). La prueba es análoga a la de a) ⇒ b).
d) ⇒ a). La prueba es análoga a la de b) ⇒ c).
∗
1.12 Ejemplo (Propiedades y caracterización de los espacios topológicos noetherianos):
1. Todo espacio topológico noetheriano es cuasi-compacto4 , i.e., toda cubierta abierta tiene una
subcubierta finita.
Tomemos X un espacio topológico noetheriano y sea Ω = {Gα }α∈I una cubierta abierta para
X. Si X ∈ Ω no hay nada que hacer, supongamos pues lo contrario, tomamos G1 ∈ Ω y
hacemos F1 = X − G1 , a continuación tomamos G2 ∈ Ω1 , donde Ω1 = Ω − {G1 } con G2 ( G1
(lo cual es posible pues si todo subconjunto Gα estuviera contenido en G1 , entonces X =
∪α Gα = G1 , lo cual serı́a una contradicción) y hacemos F2 = X − (G1 ∪ G2 ), de esta manera
generamos una sucesión estrictamente decreciente de conjuntos cerrados F1 ⊃ F2 ⊃ · · · . Ya
que X es noetheriano, dicha sucesión se estaciona en algún ı́ndice, digamos m, esto significa
que X = (G1 ∪ · · · Gm ) ∪ Fm , pero la familia {Gα }α∈I cubre a X, por lo tanto Fm = ∅ y
X = G1 ∪ · · · ∪ Gm .
2. Cualquier subconjunto de un espacio topológico noetheriano es noetheriano (con su topologı́a
inducida).
Sea X un espacio topológico noetheriano y Y ⊆ X, tomemos {Gα }α∈I una cubierta abierta
de Y . Como sabemos, (∀ α ∈ I) (∃ Hα ⊆ X) abierto tal que Gα = Hα ∩ Y . Entonces podemos
construir una sucesión decreciente de subconjuntos cerrados F1 ⊃ F2 ⊃ · · · como en el párrafo
anterior como sigue: Tomamos Gα1 y si Gα1 6= Y , tomamos F1 := X − Hα1 , a continuación
tomamos Gα2 tal que Gα2 ( G1 y hacemos F2 = X − (Gα1 ∪ Gα2 ), continuando de esta forma,
es claro que F1 ⊃ F2 · · · es una sucesión decreciente de subconjuntos cerrados en X, el cual
por hipótesis es noetheriano, por lo tanto dicha cadena se estaciona, digamos en un ı́ndice m,
i.e., Fm = X − ∪m
i=1 Hαi .
Aseveramos que Y ⊂ ∪m
/ ∪m
i=1 Hαi , de lo contrario, sea x ∈ Y con x ∈
i=1 Hαi , entonces existe
m
β ∈ I, β 6= αi tal que x ∈ Gβ , ası́ Fm ) Fβ , donde Fβ = X −(∪i=1 Hαi )∪Hβ , lo cual contradice
m
la minimalidad de Fm . Ası́ se tiene que Y = Y ∩ (∪m
i=1 Hαi ) = ∪i=1 Gαi y se sigue que Y es
noetheriano.
3. Un espacio topológico X es noetheriano si, y solo si, todo subconjunto abierto U ⊆ X es
cuasi-compacto.
Si X es un espacio topológico noetheriano, entonces cualquier subconjunto abierto de él es
nuevamente noetheriano (con la topologı́a inducida) y por lo tanto cuasi-compacto. Recı́procamente, sea U1 ⊆ U2 · · · una cadena ascendente de subconjuntos abiertos. Si denotamos por
U a la unión de todos estos conjuntos, entonces U es un conjunto abierto y por hipótesis cuasicompacto. Entonces U resulta ser la unión de un número finito de estos conjuntos abiertos, y
como estos formaban una cadena podemos concluir que U es uno de ellos. Pero esto prueba
que la sucesión U1 ⊆ U2 · · · es estacionaria. Por la Proposición 1.9, X es noetheriano.
La razón principal de introducir los espacios noetherianos en nuestra discusión la da la siguiente
proposición.
4
La mayorı́a de los autores llaman cuasi-compacto a este tipo de espacios, reservando el término compacto sólo para
los espacios Hausdorff. En general (como veremos posteriormente), los espacios topológicos noetherianos de interés no
son Hausdorff.
13
1.4. Propiedades Topológicas
1. Variedades Afines
Proposición 1.10. En un espacio topológico noetheriano X, todo subconjunto cerrado no vacı́o
Y puede expresarse como unión finita Y = ∪ni=1 Yi de conjuntos cerrados irreducibles Yi . Si
pedimos que Yi ! Yj para i 6= j, entonces los Yi están determinados de manera única. Estas se
llaman las componentes irreducibles de Y .
Demostración. Primero veremos la existencia de tal representación para Y . Sea S el conjunto de
conjuntos cerrados de X no vacı́os que no se puedan expresar como unión finita de subconjuntos
cerrados irreducibles. Si S 6= ∅, como X es noetheriano, por la Proposición 1.9 debe existir un
elemento minimal Y ∈ S. Entonces por construcción, Y no es irreducible, por lo que ∃ Y1 , Y2
subconjuntos propios cerrados de Y tales que Y = Y1 ∪ Y2 . Por la minimalidad de Y , tanto Y1
como Y2 se pueden expresar como unión finita de subconjuntos cerrados irreducibles, por lo tanto
también Y , lo cual es una contradicción. Concluimos que todo conjunto cerrado Y puede ser escrito
como una unión Y = ∪ni=1 Yi de conjuntos irreducibles. Quitando algunos si es necesario, podemos
suponer que ∀ i 6= j : Yi ! Yj .
0
0
A continuación supongamos que Y = ∪m
i=1 Yi es otra de tales representaciones. Entonces Y1 ⊆
0
n
0
0
Y = Y1 ∪· · ·∪Yn , por lo que Y1 = ∪i=1 (Y1 ∩Yi ), pero Y1 es irreducible, por lo que ∃i ∈ {1, . . . , n} tal
que Y10 ⊆ Yi , digamos i = 1; de manera similar ∃ j ∈ {1, . . . , m} tal que Y1 ⊆ Yj0 , entonces Y10 ⊆ Yj0 ,
por lo que j = 1 y vemos que Y1 = Y10 . A continuación sea Z = (Y − Y1 ). Entonces Z = Y2 ∪ · · · ∪ Yn
y también Z = Y20 ∪ · · · ∪ Ym0 por lo que al continuar por inducción, se obtiene la unicidad de las
componentes Yi .
∗
Corolario 1.11. Todo conjunto algebraico de An puede expresarse de manera única como la
unión de variedades, ninguna conteniendo a la otra.
Como una aplicación de la Proposición 1.10, a continuación ofrecemos una caracterización completa
de los espacios topológicos noetherianos que además son Hausdorff.
1.13 Ejemplo: Un espacio topológico noetheriano X es de Hausdorff si, y solo si, X es un conjunto
finito con la topologı́a discreta.
Para ver esto, tomemos X un espacio noetheriano que también es Hausdorff, entonces por (1.10)
se sigue que existen Y1 , . . . , Yn subconjuntos cerrados irreducibles unı́vocamente determinados tales
que X = Y1 ∪ · · · ∪ Yn , a continuación tomamos una de tales componentes, digamos Yk , y elegimos
dos puntos distintos α, β ∈ Yk , entonces como X es Hausdorff, existen U, V vecindades de α y β
respectivamente tales que U ∩ V = ∅, en este caso U 0 = U ∩ Yk y V 0 = V ∩ Yk son dos vecindades no
vacı́as de α y β respectivamente en Yk , por ser éste irreducible, cualesquiera dos conjuntos abiertos
no vacı́os se intersecan, i.e., U 0 ∩ V 0 6= ∅, pero U 0 ∩ V 0 ⊆ U ∩ V = ∅, lo cual es una contradicción,
luego, ∀ k ∈ {1, . . . , n}, Yk = {xk } y X = {x1 , . . . , xn } es finito. Por último, notemos que la unión
finita de conjuntos cerrados es cerrado, el espacio total X y el conjunto vacı́o son cerrados, entonces
concluimos que todos los subconjuntos de X son cerrados, y por lo tanto, X debe tener la topologı́a
discreta.
Recı́procamente, si (X, D) es un espacio topológico en el cual X es un conjunto finito y D es la
topologı́a discreta en X, se sigue que Card D < ∞, por lo tanto, dada Y1 ⊇ Y2 ⊇ · · · una cadena
descendente de subconjuntos cerrados, es obvio que no puede contener una infinidad de elementos,
por lo que debe ser estacionaria. Esto nos dice que X es noetheriano. Por último, es claro que X
es Hausdorff, pues cada punto es abierto. Concluimos que un espacio noetheriano es Hausdorff si, y
solo si, X es un conjunto finito con la topologı́a discreta.
Hemos visto que para estudiar los conjuntos algebraicos es suficiente con estudiar las variedades
algebraicas afines, y esto justifica el por que del papel central de estos objetos en nuestro estudio.
Veamos a continuación un ejemplo concreto de aplicación del Corolario 1.11
14
1.5. Dimensión
1. Variedades Afines
1.14 Ejemplo: Sea Y el conjunto algebraico en A3 definido por los dos polinomios x2 −yz y xz −x.
Muestre que Y es la unión de tres componentes irreducibles. Descrı́balas y halle sus ideales primos.
De la condición xz − x = 0 se desprende inmediatamente x = 0 o z = 1. Si z = 1, entonces,
tomando la condición x2 = yz se sigue que x2 = y en el plano z = 1. Al tomar la condición x = 0,
tenemos y = 0 ó z = 0 (en el plano x=0), ası́, Y = V1 ∪ V2 ∪ V3 , donde V1
= Z(hx, yi) que el eje
z, V2 = Z(hx, zi) que es el eje y y una parábola en el plano z = 1 V3 = Z( x2 − y, z − 1 ) (Ver la
Figura 1.2). V1 es irreducible pues k[x, y, z]/I(V1 ) ∼
= k[ z ], que es dominio entero, análogamente V2
∼
es irreducible pues k[x, y, z]/I(V2 ) = k[ y ] y V3 es irreducible por el Ejemplo 1.9.
z
V1
A3
V3
z=1
y
V2
x
Figura 1.2: El conjunto algebraico Y = Z(x2 − yz, xz − x) es la unión de 3 variedades irreducibles.
1.5.– Dimensión
A continuación aplicaremos los resultados obtenidos en la sección anterior (en particular, la
noción de irreducibilidad) para definir la dimensión de un espacio topológico. Posteriormente pondremos a nuestra disposición una serie de herramientas obtenidas principalmente del Álgebra Conmutativa, con las cuales será más fácil obtener la dimensión de las variedades afines.
Definición: Si X es un espacio topológico no vacı́o, definimos la dimensión de X (denotada dim
X) como el supremo de todos los enteros n tales que existe una cadena estrictamente creciente
Z0 ( Z1 ( · · · ( Zn de conjuntos cerrados irreducibles de X. Definimos la dimensión de una
variedad afı́n o cuasi-afı́n a ser su dimensión como espacio topológico.
1.15 Ejemplo: Se tiene que dim A1 = 1, pues los únicos subconjuntos cerrados irreducibles de A1
son los conjuntos que constan de un solo punto (también llamados unipuntuales) {x} y A1 .
1.16 Ejemplo (Variedades de dimensión cero): Todo espacio topológico noetheriano X 6= ∅
que además es Hausdorff tiene dimensión 0. En efecto, cualquier subconjunto C 6= ∅ cerrado e
irreducible de X consta de un solo punto. De lo contrario, tomemos x, y ∈ C tales que x 6= y,
entonces existen Vx , Vy vecindades de x y y respectivamente, tales que Vx ∩ Vy = ∅, pero de acuerdo
al inciso 1 del Ejemplo 1.4,se tiene que Vx ∩ Vy 6= ∅, lo cual es una contradicción. De esto se sigue
fácilmente que si X ⊂ An es un conjunto algebraico no vacı́o, entonces dim X = 0 si, y solo si, X
es un conjunto finito de puntos.
15
1.5. Dimensión
1. Variedades Afines
1.17 Ejemplo (Propiedades de la Dimensión de Espacios Topológicos):
1. Sea X un espacio topológico y Y un subconjunto de X, entonces dim Y ≤ dim X.
Es suficiente probar que si W0 ( · · · ( Wn es una cadena de conjuntos cerrados irreducibles de
Y , entonces podemos hallar una cadena de conjuntos cerrados irreducibles en X de la misma
longitud.
A continuación, existen conjuntos Vi cerrados en X tales que Wi = Y ∩ Vi para todo i =
1, . . . , n. Ya que la propiedad de ser irreducible es intrı́nseca del espacio topológico, tenemos
que los conjuntos Wi son también irreducibles en X. Ahora tomamos la cadena W 0 ( · · · ( W n
de las cerraduras en X de los Wi , las cuales por el inciso 2) del Ejemplo 1.4, son irreducibles
en X. Por lo tanto sólo falta probar que ∀ i : Wi 6= Wi+1 . Supongamos lo contrario, que
W i = Vi ∩ Y = Vi+1 ∩ Y = W i+1 . Entonces tomemos x ∈ Vi+1 ∩ Y , ası́ x ∈ Vi+1 ∩ Y y por
hipótesis x ∈ Vi ∩ Y ⊆ V i ∩ Y = Vi ∩ Y , ya que Vi es cerrado, concluimos que x ∈ Vi y, como
x ∈ Vi+1 ∩ Y , entonces x ∈ Y , por lo tanto tenemos que x ∈ Vi ∩ Y y esto dice que Vi+1 ⊆ Vi ,
i.e., Vi+1 = Vi , lo cual es una contradicción.
2. Si X es un espacio topológico que está cubierto por una familia de subconjuntos abiertos {Ui },
entonces dim X = supi dim Ui .
Por la parte anterior, tenemos que si {Ui } es una cubierta abierta de X, entonces ∀i : dim Ui ≤
dim X, por lo que se sigue que supi dim Ui ≤ dim X. A continuación sea Z0 ( Z1 ( · · · ⊂ Zn
una cadena de subconjuntos cerrados irreducibles de X. Como X = ∪i Ui , entonces ∃ Uj :
Uj ∩ Z0 6= ∅. Entonces tenemos que Z0 ∩ Uj ⊆ · · · ⊆ Zn ∩ Uj es una cadena de subconjuntos
cerrados de Uj .
Notemos también que ∀ k ∈ {1, . . . , n} : Zk ∩ Uj ⊂ Zk es un subconjunto abierto, por lo
tanto irreducible. Esto significa que Z0 ∩ Uj ⊆ · · · ⊆ Zn ∩ Uj es una cadena de subconjuntos
cerrados irreducibles de Uj . Solo resta probar que las inclusiones anteriores son propias, lo
cual se demuestra más adelante en esta sección (ver la demostración de la Proposición 1.15
en la página 19). Por lo tanto Z0 ∩ Uj ( · · · ( Zn ∩ Uj es una cadena propia de subconjuntos
cerrados irreducibles de Uj , por lo que necesariamente ∀ j : dim X ≤ dim Uj , y se sigue que
dim X ≤ supi dim Ui .
3. Aunque U ⊆ X se una conjunto abierto y denso, se puede tener dim U < dim X (estrictamente
menor). Por ejemplo, sea X = {a, b} y consideremos T = {∅, {a}, X}, entonces (X, T ) es un
espacio topológico con {a} abierto y denso en X. Claramente dim {a} = 0. A continuación,
tenemos que {b} es irreducible, y X también es irreducible, pues la única descomposición no
trivial de X está dada por {a}∪{b}, por lo tanto {b} ⊂ X es una cadena de conjuntos cerrados
irreducibles en X, por lo que dim X ≥ 1 y se sigue que dim {a} < dim X.
4. Si Y es un subconjunto cerrado de un espacio topológico irreducible X de dimensión finita, y
si dim Y = dim X, entonces Y = X.
Como dim X < ∞, entonces dim Y < ∞, digamos dim Y = n. A continuación supongamos
Y ( X, mostraremos que dim Y < dim X. Sea Y0 ( · · · ( Yn una cadena de conjuntos
cerrados irreducibles de Y . Como cada Yi es cerrado en Y y Y es cerrado en X, entonces cada
Yi es cerrado en X. También, como cada Yi es irreducible en Y , entonces también lo son en
X. Por lo tanto, ya que X es irreducible, tenemos que Y0 ( · · · ( Yn ( X es una cadena
de conjuntos cerrados irreducibles en X. Entonces dim X ≥ n + 1 > dim Y , lo cual es una
contradicción. Luego, se sigue que Y = X.
16
1.5. Dimensión
1. Variedades Afines
5. Una de las patologı́as que pueden tener los anillos noetherianos es que pueden ser de dimensión infinita. A continuación construiremos un espacio topológico noetheriano X con dicha
caracterı́stica. Consideremos X = N ∪ {0}, definimos ∀ x ∈ X : (x, ∞) = {y ∈ X | x < y}
y [0, x] = {y ∈ X | y ≤ x} = (x, ∞)c . A continuación tomamos la familia de subconjuntos
T que contiene a todos los subconjuntos de X de la forma (x, ∞) para todo x ∈ X, además
de contener al conjunto total X y al conjunto vacı́o. Entonces es fácil ver que (X, T ) es un
espacio topológico. Veamos que es noetheriano. Consideremos [0, n0 ] ⊇ [0, n1 ] ⊇ · · · cualquier
cadena descendente de conjuntos cerrados de X. Claramente esta cadena no puede continuar
indefinidamente, pues todos estos subconjuntos contienen al conjunto [0, 0]. Por lo tanto, X
es noetheriano.
Ahora sea [0, n] un conjunto cerrado, y supongamos que se expresa como la unión de dos
conjuntos cerrados propios [0, a] = [0, b] ∪ [0, c], con b, c < a, en este caso tendrı́amos que
a 6= [0, b] ∪ [0, c], por lo que dicha unión es imposible. Por lo tanto todo conjunto cerrado es
irreducible.
Por último, sea [0, a0 ] ( [0, a1 ] ( · · · ( [0, an ] una cadena de subconjuntos cerrados irreducibles
de X, vemos que siempre podemos extender dicha cadena al elegir x ∈ N tal que an < x,
entonces [0, an ] ( [0, x] extiende la cadena. Continuando de esta forma vemos que cualquier
cadena de este tipo se puede extender de manera indefinida. Por lo tanto el espacio topológico
(X, T ) es de dimensión infinita.
Definición: En un anillo A, la altura de un ideal primo (denotada ht p) es el supremo de todos
los enteros n tales que existe una cadena p0 ( p1 ( · · · ( pn = p de ideales primos. Definimos la
dimensión (o dimensión de Krull) de A como el supremo de las alturas de todos los ideales primos
de A.
Proposición 1.12. Si Y es un conjunto algebraico afı́n, entonces dim Y = dim A(Y ).
Demostración. Si Y es un conjunto algebraico afı́n en An , entonces sus subconjuntos cerrados
irreducibles corresponden a ideales primos de k[x1 , . . . , xn ] que contienen a I(Y ). Estos a su vez
corresponden a ideales primos en A(Y ). Por lo tanto dim Y es la longitud de la cadena más larga
de ideales primos en A(Y ), que es su dimensión.
∗
La proposición anterior nos permite aplicar resultados de la teorı́a de la dimensión de anillos
noetherianos a la geometrı́a algebraica. En particular, nos serı́a de utilidad tener un buen criterio
para determinar la dimensión de Krull, pues podemos utilizarla para hallar la dimensión de conjuntos
algebraicos afines.
α Teorema 1.13. Sean k un campo y B un dominio entero el cual es una k-álgebra finitamente
generada. Entonces:
1. la dimensión de B es igual al grado de trascendencia del campo de cocientes coc B de B
sobre k;
2. para todo ideal primo p en B, tenemos
ht p + dim B/p = dim B.
Demostración. Ver Matsumura. H. Commutative Algebra, W. A. Benjamin Co., New York
(1970), 2, Capı́tulo 5, §14.
∗
17
1.5. Dimensión
1. Variedades Afines
Proposición 1.14. La dimensión de An es n.
Demostración. De acuerdo con (1.12) esto dice que la dimensión del anillo k[x1 , . . . , xn ] es n,
lo que se sigue de la parte (1) del teorema anterior, pues el campo de cocientes de este anillo es
k(x1 , . . . , xn ), el cual tiene grado de trascendencia igual a n sobre k. (Ver [AM69], Cap. 11. Para
otro tipo de demostración, véase [Eis95], página 281).
∗
El siguiente ejemplo utiliza un resultado de la Teorı́a de la Dimensión para anillos Noetherianos.
(Ver [AM69] Cap. 11 como referencia sobre el tema)
1.18 Ejemplo: Sea a ⊆ k[x1 , . . . , xn ] un ideal que puede ser generado por r elementos. Entonces
toda componente irreducible de Z(a) tiene dimensión mayor o igual que n − r. (Para una generalización de este ejemplo, véase el Teorema 5.1 del Capı́tulo 5).
En efecto, sea Y = Z(a) = Y1 ∪· · ·∪Ys la descomposición de Y como unión de componentes cerradas
irreducibles con Vi
Vj para i 6= j. Como cada Yi es irreducible, se sigue que ∀ i ∈ {1, . . . , s} :
I(Yi ) = pi es un ideal primo. Más aún, {p1 , . . . , ps } es el conjunto de primos minimales asociados al
ideal a. Para ver esto, recordamos que
!
s
s
s
[
\
\
I(Z(a)) = I
Yi =
I(Yi ) =
pi ,
i=1
i=1
i=1
√
y que I(Z(a)) = a es la intersección de los primos minimales asociados al ideal a (los cuales están
unı́vocamente determinados por a).
Por un corolario del Teorema de la dimensión, sabemos que si x1 , . . . , xr son elementos de un anillo
noetheriano A, entonces todo ideal primo minimal p perteneciente a hx1 , . . . , xr i es tal que ht p ≤ r.
Luego ht pi ≤ r para todo i. Por último,
dim (Yi ) = dim (k[x1 , . . . , xn ]/pi ) = dim k[x1 , . . . , xn ] − ht pi ≥ n − r
para i ∈ {1, . . . , s}. Ası́ toda componente irreducible de Z(a) tiene dimensión no menor que n − r.
El siguiente ejemplo será de gran importancia en el desarrollo subsecuente de este trabajo, por
lo que lo desarrollamos concienzudamente.
1.19 Ejemplo (La curva cúbica torcida): . Sea Y ⊆ A3 el conjunto Y = {(t, t2 , t3 ) : t ∈ k}
(Ver Figura 1.3 más adelante). Muestre que Y es una variedad afı́n de dimensión 1. Halle generadores
para el ideal I(Y ). Muestre que A(Y ) es isomorfo a un anillo de polinomios en una variable sobre
k. Decimos que Y está dada por la representación paramétrica x = t, y = t2 , z = t3 .
Tenemos
puntos
en el conjunto satisfacen las relaciones x2 − y = 0 y x3 − z = 0. Sea
2 que los
3
a = x − y, x − z , entonces Y ⊂ Z(a), además, dado α = (a1 , a2 , a3 ) ∈ Z(a), tenemos que
∀ f ∈ a : f (α) = 0, en particular, a21 − a2 = a31 − a3 = 0, luego α = (a1 , a21 , a31 ) ∈ Y , por lo
tanto Y = Z(a) y Y es una variedad afı́n. A continuación definimos ϕ : k[x, y, z] −→ k[ t ] por
ϕ(f (x, y, z)) = f (t, t2 , t3 ) o, lo que es lo mismo
ϕ : k[x, y,z] −→ k[ t ]
x 7→ t
y 7→ t2
z 7→ t3
18
1.5. Dimensión
1. Variedades Afines
Fácilmente
que ϕ es un P
homomorfismo de anillos y también tenemos que ϕ es suprayectiva
Pn vemos
n
(∀ f = i=0 an t ∈ k[ t ] ∃ g = ni=0 an xn ∈ k[x, y, z] : ϕ(g) = f .)
A continuación veamos que Ker ϕ = a. ∀ h ∈ a ∃ f, g ∈ k[x, y, z] tales que h = f (x2 − y) + g(x3 − z),
luego ϕ(h) = 0, esto prueba que a ⊆ Ker ϕ. Recı́procamente, sea f ∈ Ker ϕ, denotaremos por R al
anillo k[x, y]. Consideremos el polinomio g(z) = −z + x3 en el anillo R[ z ], tenemos que −1 ∈ R∗
y ası́, por (1.8) ∃ h1 , r1 ∈ R[z] : f = h1 (x3 − z) + r1 , donde r1 = 0 ó deg r1 = 0 (en cuyo caso
r1 ∈ R = k[x, y]). Si r1 = 0, entonces f ∈ a y hemos terminado, de lo contrario, tomamos ahora
el polinomio g(y) = −y + x2 ∈ k[ x ][ y ], nuevamente por (1.8) tenemos que ∃ h2 , r2 ∈ k[ x ][ y ] :
r1 = h2 (x2 − y) + r2 , donde r2 = 0 ó deg r2 = 0 (en cuyo caso r2 ∈ k[ x ]). Si r2 = 0, entonces
f = h1 (x3 − z) + h2 (x2 − y) y f ∈ a, de lo contrario, tenemos que
f = h1 (x3 − z) + h2 (x2 − y) + r2 (x)
Aplicando ϕ a la ecuación anterior, tenemos que 0 = r(t), ası́ r = 0 y f ∈ a. Por tanto hemos
demostrado que
∼
A(Y ) = k[x, y, z]/a −→ k[ t ],
de donde se desprende inmediatamente que dim Y = 1.
y=x 2
z=x 3
z=x 3
y=x 2
Figura 1.3: La curva cúbica torcida Y = Z(x2 − y, x3 − z) = Z(x2 − y) ∩ Z(x3 − z).
Proposición 1.15. Si Y es una variedad cuasi-afı́n, entonces dim Y = dim Y .
Demostración. Veamos primero algunos hechos topológicos básicos.
1. Sean Z1 ( Z2 dos conjuntos cerrados irreducibles de Y . Si Z1 ∩ Y 6= ∅, entonces (Z1 ∩ Y ) (
(Z2 ∩ Y ). Para ver esto, como Y es abierto, Z1 ∩ Y ⊂ Z1 es un conjunto abierto no vacı́o
y, como Z1 es irreducible, tenemos que también es denso, ası́, su cerradura en Z1 es Z1 , y
como Z1 es cerrado en Y , su cerradura en Y también es Z1 . Lo mismo sucede con Z2 ∩ Y ; su
cerradura en Y es Z2 . Por lo tanto, los dos conjuntos no pueden ser iguales.
2. Si U es un subconjunto cerrado irreducible de Y , entonces su cerradura en Y , digamos U , es
irreducible en Y . Para ver esto, notemos que U es irreducible en Y , entonces, por el Ej. (1.4),
tenemos que U es irreducible en Y .
19
1.5. Dimensión
1. Variedades Afines
Se sigue de (1) y (2) que si
∅=
6 Z0 ( Z1 ( · · · ( Zr
es una cadena de conjuntos cerrados irreducibles en Y , entonces
Z0 ( Z1 ( · · · ( Zr
( con las cerraduras tomadas en Y )
es una cadena de conjuntos cerrados irreducibles en Y . En consecuencia, dim Y ≤ dim Y . Como
dim Y < ∞ (digamos dim Y = m), entonces también dim Y < ∞. Sea dim Y = s, y elegimos una
cadena maximal de subconjuntos cerrados irreducibles Z0 ( · · · ( Zs en Y . En este caso, Z0 debe
ser un punto P , y por el hecho (1) anterior, la cadena P = Z0 ( · · · ( Zs es una cadena en Y .
A continuación, P esta en correspondencia con un ideal maximal m en A(Y ), entonces los Zi están
en correspondencia con ideales primos contenidos en m, por lo que ht m = s. Por otra parte, como
P es un punto en el espacio afı́n, A(Y )/m ∼
= k, ası́, por (1.13) tenemos que s = dim A(Y ) = dim Y .
Se sigue que dim Y = dim Y .
∗
α Teorema 1.16 (Hauptidealsatz de Krull o Teorema del ideal principal). Sea A un
anillo noetheriano y f ∈ A un elemento que no sea divisor de cero ni una unidad. Entonces
todo ideal primo minimal p que contenga a f tiene altura 1.
Demostración. Ver [Kun85], página 131, ó [AM69], página 122.
∗
α Teorema 1.17. Un dominio entero noetheriano A es un dominio de factorización única sı́ y
sólo sı́ todo ideal primo de altura 1 es principal.
Demostración. Ver Matsumura. H. Commutative Algebra, página 141.
∗
En el Ejemplo 1.16 utilizamos argumentos topológicos para caracterizar a todos los conjuntos
algebraicos (y con ello, a las variedades algebraicas) de dimensión 0 en An . A continuación utilizaremos estos dos importantes resultados del Álgebra Conmutativa para caracterizar completamente
las variedades de dimensión n − 1 en An .
Proposición 1.18. Una variedad Y en An tiene dimensión n − 1 si y solo si es el conjunto de
ceros de un sólo polinomio no constante irreducible en A = k[x1 , . . . , xn ]
Demostración. Si f es un polinomio irreducible, entonces por el Ejemplo 1.6 se tiene que Z(f ) es
una variedad. Su ideal es el ideal primo p = hf i. Por (1.16) p tiene altura 1, ası́ que por (1.13), Z(f )
tiene dimensión n − 1. Recı́procamente, una variedad de dimensión n − 1 corresponde (por 1.13)
a un ideal primo de altura 1. A continuación notemos que el anillo de polinomios A es un DFU,
ası́ que por (1.17), p es un ideal principal, necesariamente generado por un polinomio irreducible.
Por lo tanto Y = Z(f ), lo cual concluye la demostración.
∗
Como aplicación de la proposición anterior, tenemos el siguiente ejemplo.
1.20 Ejemplo: Sea Y una variedad afı́n de dimensión r en An . Sea H una hipersuperficie en An y
supongamos que Y * H. Entonces toda componente irreducible de Y ∩ H tiene dimensión r − 1.
En efecto, sea X
Y ∩ H una componente irreducible, como X ⊂ Y , entonces I(X) ⊃ I(Y ) y
I(X)/I(Y ) = p es un ideal primo en A(Y ), el anillo coordenado de Y . Además
k[x1 , . . . , xn ]/I(Y ) ∼
A(Y )/p ∼
=
= A(X),
I(X)/I(Y )
20
1.5. Dimensión
1. Variedades Afines
se sigue que
dim (X) = dim A(X) = dim A(Y ) − ht (p).
Supongamos que H = Z(hf i), y como X ⊂ H, entonces I(X) ⊃ hf i, consideremos el ideal a :=
hhf i + I(Y )i /I(Y ) ⊂ A(Y ); tenemos que hf i , I(Y ) ⊂ I(X) ⇒ hf i + I(Y ) ⊂ I(X), por lo tanto
a ⊂ p. Sea π(f ) ∈ A(Y ) la imagen de f bajo la proyección canónica π : A −→ A(Y ), entonces es
claro que π(f ) ∈ a no es unidad (pues de serlo, p = A(Y )) ni un divisor de cero, por lo tanto, se
tiene por (1.16) que p tiene altura 1, luego, tenemos que dim X = n − 1.
Un ideal primo de altura 2 en un anillo de polinomios no es necesariamente generado por dos
elementos. Antes de presentar un ejemplo donde esto ocurre, necesitamos un resultado previo, que
generaliza el método de la representación paramétrica que utilizamos en el caso de la cúbica torcida
(Ejemplo 1.19).
Proposición 1.19. Sean f1 , . . . , fn ∈ k[y1 , . . . , ym ] y consideremos el conjunto
V = {(f1 (a1 , . . . , am ), . . . , fn (a1 , . . . , am )) | (a1 , . . . , am ) ∈ k m } ⊆ An .
Entonces V es una variedad algebraica. (Se dice que V está dada por una parametrización
polinomial con parámetros y1 , . . . , ym ).
Demostración. Consideremos el k-homomorfismo ψ : k[x1 , . . . , xn ] −→ k[y1 , . . .P
, ym ] definido por
xi 7→ fi (t1 , . . . , tm ), i ∈ {1, . . . , n}. Tomemos (a1 , . . . , am ) ∈ k m y f (x1 , . . . , xn ) = ai1 ···in xi11 · · · xinn
∈ k[x1 , . . . , xn ]. Se tiene que
X
(ψ(f ))(a1 , . . . , am ) =
ai1 ···in f1i1 (y1 , . . . , ym ) · · · fnin (y1 , . . . , ym ) (a1 , . . . , am )
= f (f1 (a1 , . . . , am ), . . . , fn (a1 , . . . , am )).
Por lo tanto tenemos que ψ(f ) es el polinomio cero si, y sólo si, f (v) = 0 para todo v ∈ V , por
lo tanto Ker ψ = I(V ) ⇒ Z(Ker ψ) = Z(I(V )) = V . A continuación como k[x1 , . . . , xn ]/Ker ψ es
isomorfo a un subanillo de un dominio entero, se sigue que Ker ψ es un ideal primo, por lo que V
es irreducible. Finalmente, por el inciso (2) del Ejemplo 1.4, se tiene que V es irreducible.
∗
1.21 Ejemplo: Sea Y ⊂ A3 la curva definida paramétricamente por x = t3 , y = t4 , z = t5 .
Mostrar que I(Y ) es un ideal primo en k[x, y, z], con ht I(Y ) = 2, que no puede ser generado por
dos elementos.
Sea Y = {(t3 , t4 , t5 )|t ∈ k}, entonces ht I(Y ) = dim k[x, y, z]−dim A(Y ). Pero dim A(Y ) = dim Y ,
por lo que ht I(Y ) = 3 − dim Y . Queremos probar que dim Y = 1, para lo cual veremos que los
únicos subconjuntos cerrados propios de Y constan de una cantidad finita de puntos, por lo que los
únicos subconjuntos cerrados irreducibles de Y serán conjuntos de un solo punto.
Ası́, supongamos que V ⊂ Y es un subconjunto cerrado propio de Y con una cantidad infinita
de puntos. Entonces existen f1 , . . . , fn ∈ k[x, y, z] tales que V = Z(f1 , . . . , fn ) ⊂ Y . Entonces
f1 (t3 , t4 , t5 ) = · · · = fn (t3 , t4 , t5 ) = 0 para un numero infinito de puntos t ∈ k, por lo que para
i = 1, . . . , n, los polinomios gi (t) = fi (t3 , t4 , t5 ) se anulan en una cantidad infinita de puntos t ∈ k,
y la única posibilidad para que esto ocurra es que cada polinomio gi sea el polinomio idénticamente
cero. En consecuencia, ∀ (t3 , t4 , t5 ) ∈ Y : f1 (t3 , t4 , t5 ) = · · · = fn (t3 , t4 , t5 ) = 0, y necesariamente
debemos tener V = Y . Concluimos que los únicos subconjuntos cerrados propios de Y consisten
de una cantidad finita de puntos de Y , por lo que las únicas cadenas de subconjuntos cerrados
irreducibles de Y son de la forma {(t3 , t4 , t5 )} ⊂ Y , y se sigue que dim Y = 1. Ası́ ht I(Y ) = 2.
21
1.5. Dimensión
1. Variedades Afines
Ya que Y es una parametrización polinomial, por la Proposición 1.19 anterior se tiene que Y es
irreducible, por lo que I(Y ) es primo. En [CLO97] se prueba que el ideal I(Y ) es generado por los
elementos:
I(Y ) = y 2 − xz, x3 − yz, x2 y − z 2 .
Para la siguiente discusión, es necesario leer la Sección 2.1 que habla sobre anillos graduados. Le
damos una graduación a los elementos x, y y z de la siguiente forma: deg x = 3, deg y = 4,
deg z = 5. De esta manera, I(Y ) es un ideal homogéneo generado por 3 elementos de grado 8, 9
y 10. Supongamos que I(Y ) es generado por dos elementos homogéneos f1 y f2 . Entonces, ya que
I(Y ) no posee elemento de grado menor que 8, tenemos que deg f1 ≥ 8 y deg f2 ≥ 8. De hecho,
∃ i ∈ {1, 2} tal que deg fi = 8, de lo contrario no se podrı́a tener que y 2 − xz ∈ I(Y ). Sin pérdida
de generalidad, supongamos que deg f1 = 8.
El problema es que ahora no podemos obtener un elemento de grado 9. Cualquier monomio xα y β z γ
tiene al menos grado 3, pues deg x = 3. Por lo tanto, deg (xα y β z γ · f1 ) ≥ 11. Ası́, para cualquier
polinomio homogéneo g se tiene que deg (gf1 ) = 8 ó deg (gf1 ) ≥ 11, y de esta manera nunca
podrı́amos obtener un elemento de grado 9 en I(Y ), por lo tanto se debe tener que deg f2 = 9. Pero
al seguir el mismo razonamiento, vemos que no es posible encontrar un elemento de grado 10 en
I(Y ). Por lo tanto x2 y − z 2 no estarı́a en I(Y ), lo cual es una contradicción. Concluimos que I(Y )
no puede ser generado por dos elementos.
En este caso, decimos que Y no es una intersección local completa. (Ver la Sección 2.6 del
Capı́tulo 2 y el Capı́tulo 5).
22
Capı́tulo 2
Variedades Proyectivas
En este Capı́tulo ampliaremos nuestro espacio de trabajo al
n-espacio proyectivo Pn (se in-
troduce en la Sección 2.1) junto con una discusión sobre anillos e ideales graduados, los
cuales son la base de la Geometrı́a Algebraica Proyectiva. Definimos los conjuntos algebraicos en Pn como conjuntos de ceros de sistemas de polinomios homogéneos, e intentaremos trasladar a este nuevo contexto algunos de los conceptos acuñados a lo largo del Capı́tulo 1. Como existen algunos problemas técnicos que impiden que esta traslación sea hecha
de manera inmediata, introducimos en la Sección 2.2 la noción de cono afı́n sobre una variedad proyectiva, la cual nos permite sortear estos inconvenientes y obtener una versión
“homogénea” de la correspondencia entre conjuntos algebraicos en
Pn e ideales del anillo
k[x0 , . . . , xn ].
En la Sección 2.3 veremos que toda variedad proyectiva tiene una cubierta abierta finita formada de conjuntos que son homeomorfos a variedades afines. Posteriormente utilizaremos
este resultado para caracterizar la dimensión de una variedad proyectiva vı́a un objeto algebraico análogo al anillo coordenado de una variedad afı́n, con lo que estableceremos ciertos
resultados sobre la dimensión de algunas variedades proyectivas.
Las Secciones 2.4 y 2.5 estudian respectivamente dos construcciones clásicas en Geometrı́a
Algebraica; la inmersión d-ésima de Veronese y la inmersión de Segre. La primera encaja de
manera no trivial un espacio proyectivo
Pn como un subconjunto algebraico de otro espacio
proyectivo de mayor dimensión. La segunda es una herramienta importante que nos permite definir de manera natural una estructura de variedad algebraica al conjunto
Pn × P m ;
encajándolo también como un subconjunto algebraico de un espacio proyectivo de mayor
dimensión.
Por último, en la Sección 2.6 iniciamos con ejemplos el estudio de los fenómenos de intersección de variedades en el espacio proyectivo, los cuales ampliaremos posteriormente en el
Capı́tulo 5.
Intuitivamente, la Geometrı́a Proyectiva es la geometrı́a utilizada para estudiar las propiedades de
las figuras que son invariantes bajo la proyección desde un punto. En la Figura 2.1, cuando la lı́nea
que une O (el origen de la proyección) y un punto P en un plano paralelo al plano inferior, el
punto P no es proyectado. Por lo tanto se introdujo en Geometrı́a Proyectiva la idea de tener un
punto al infinito (para un desarrollo más concreto sobre que hay detrás de la idea de la Geometrı́a
Proyectiva, véase [CLO97], página 346). Volveremos a este punto más adelante, después de haber
dado formalmente la definición de espacio proyectivo que estaremos utilizando en el desarrollo
subsecuente.
2.1.– El Espacio Proyectivo y Variedades Proyectivas
23
2.1. El Espacio Proyectivo y Variedades Proyectivas
2. Variedades Proyectivas
O
P
Q
Q'
Figura 2.1: Proyección desde un punto.
Sea k nuestro campo algebraicamente cerrado fijo. Definimos el n-espacio proyectivo sobre k,
denotado por Pnk o simplemente por Pn , a ser el conjunto de clases de equivalencia de (n + 1)-ada
(a0 , . . . , an ) de elementos de k no todos iguales a cero, bajo la relación de equivalencia dada por
(a0 , . . . , an ) ∼ (b0 , . . . , bn ) ⇔ ∃ λ ∈ k ∗ : a0 = λb0 , . . . , an = λbn (i.e., Pn := (k n+1 − {0, . . . , 0})/ ∼).
Un elemento de Pn es llamado un punto. Si P representa un punto, entonces cualquier (n+1)-ada
(a0 , . . . , an ) en la clase de equivalencia de P es llamado un conjunto de coordenadas homogéneas
para P y se representará por [a0 : · · · : an ]. De nuestra definición vemos que las entradas ai no
pueden ser simultáneamente todas cero, y que además están definidas salvo múltiplo escalar. Por lo
tanto los mapeos coordenados xi : Pn −→ k, i ∈ {0, . . . , n}, no definen funciones válidas en Pn ; solo
son funciones bien definidas los cocientes entre ellas xxji (y únicamente en donde el denominador es
distinto de cero).
Observación 2.1: Volviendo a la discusión inicial, notemos que además de la definición algebraica
dada anteriormente, el objeto Pn tiene una definición geométrica equivalente, que a veces es útil
tener en mente y con la cual vamos a trabajar. Lo podemos definir también como el conjunto de
todos los subespacios de dimensión uno del espacio vectorial k n+1 .
No siempre es fácil visualizar como lucen los espacios proyectivos en general, sin embargo,
trataremos de obtener la intuición necesaria al analizar, en primera instancia, algunos espacios
proyectivos reales de dimensiones bajas.
2.1 Ejemplo (La lı́nea proyectiva P1 y el plano proyectivo P2 ): Describamos primero el espacio P1k , el cual consiste de todas las lı́neas que pasan a través del origen en k 2 . Al fijar una lı́nea de
referencia L en k 2 que no pase a través del origen, podemos elegir un representante para cada punto
P ∈ P1 , a saber, el único punto en el cual la lı́nea que define P interseca a L. Podemos ver que solo
un punto en P1 no posee dicho representante: es el punto que define la lı́nea que pasa por el origen
y que es paralela a L. En vista de nuestra discusión inicial, es natural denotar este punto como
el punto al infinito de P1 (es el único que no se proyecta en L) y tiene sentido pensar en la lı́nea
proyectiva como la unión disjunta de una lı́nea afı́n y nuestro punto al infinito P , i.e. P1 = A1 t {P }
(véase la Figura 2.2 (a)). De nuestra argumentación vemos que, de hecho, éste punto al infinito P
pudo haber sido cualquier elemento de P1 , según como hayamos elegido nuestra lı́nea de referencia.
Podemos ofrecer una descripción similar con el plano proyectivo P2 . En este caso consideraremos
un plano de referencia E en k 3 que no pase por el origen, después tomamos todas las lı́neas en k 3
que pasan por el origen e identificamos el punto en donde intersecan a E. Las únicas lı́neas que no
lo harán son aquellas que yazcan sobre el plano que pasa por el origen que es paralelo a nuestro
plano de referencia. De hecho, estos puntos al infinito forman una copia de P1 (véase la Figura 2.2
24
2.1. El Espacio Proyectivo y Variedades Proyectivas
2. Variedades Proyectivas
k3
k2
z
1
E
A2
L
y
0
0
x
A1
(a)
(b)
Figura 2.2: (a) La lı́nea proyectiva P1 . (b) El plano proyectivo P2 .
(b) como referencia). Por lo tanto, al juntar la descripción que ya tenı́amos de P1 , vemos que
P2 = A2 t P1 = A2 t A1 t {P }.
Los ejemplos anteriores tienen el propósito de ilustrar de modo gráfico la idea de los espacios
proyectivos, además del de familiarizarnos con la terminologı́a estándar de los puntos al infinito, y no
buscan sustituir el tratamiento un poco más abstracto que daremos en este trabajo. Continuaremos
esta discusión más adelante (Sección 2.3).
Una graduación de
Lun anillo R es una familia {Rd }d∈Z de subgrupos Rd del grupo aditivo
de R tales que R =
d∈Z Rd y ∀ d, e ∈ Z : Rd Re ⊆ Rd+e . Un anillo R es llamado un anillo
graduado si posee una graduación {Rd }d∈Z . Si ∀ d < 0 : Rd = 0, se dice que R es positivamente
graduado (en general, no utilizaremos esta distinción y utilizaremos el término anillo graduado sin
ningún adjetivo adicional). Un elemento de Rd es llamado elemento homogéneo de grado d. Por
lo tanto todo elemento de R puede ser escrito de manera única
L como una suma finita de elementos
homogéneos. Un ideal a ⊆ R es un ideal homogéneo si a = d∈Z (a ∩ Rd ).
A continuación damos condiciones equivalentes para que un ideal I sea homogéneo.
Proposición 2.1. Para un ideal I de un anillo graduado R, las siguientes condiciones son equivalentes:
a) I es homogéneo (i.e., para todo x ∈ I, las componentes homogéneas xk de x también
pertenecen a I, (k ∈ Z));
b) I puede ser generado por elementos homogéneos;
c) R/I es un anillo graduado con la graduación {(R/I)k }k∈Z , donde
∀ k ∈ Z : (R/I)k := (Rk + I)/I.
Demostración.L
a) ⇒ b). Sea I = k∈Z (I∩Rk ) un ideal homogéneo. Por el Teorema 1.1 se tiene que I es generado
por
P
un conjunto finito de polinomios {g1 , . . . , gs }, pero tenemos que ∀ i ∈ {1, . . . , s} : gi = {j∈Ai } hij ,
25
2.1. El Espacio Proyectivo y Variedades Proyectivas
2. Variedades Proyectivas
donde Ai ⊂ Z es un conjunto finito de ı́ndices, y ∀ j ∈ Ai : hij ∈ Rj , i ∈ {1, . . . , s}. De esto se sigue
que I = h{hij }i, y de esta manera, I es generado por un conjunto de elementos homogéneos.
b) ⇒ a). Supongamos que I = hAi, donde A = {aλ }λ∈Λ ⊂ R es un conjunto de elementos hoP
P
(k)
mogéneos aλ de grado dλ . Sea a = m
i=1 rλi bλi un elemento de I, y sea rλi =
k∈Z rλi la descomP
(k−dλ )
posición de rλi en componentes homogéneas. Entonces a = k∈Z ak , con ak := rλ1 1 · bλ1 + · · · +
L
(k−d )
rλm λm · bλm y donde ak ∈ Rk . Obviamente ∀ k ∈ Z : ak ∈ I, luego, a ∈ k∈Z I ∩ Rk . La otra
inclusión es obvia.
P
a) ⇒ c). Es claro que R/I = k∈Z (R/I)k , por lo tanto, es suficiente probar que la representación
de
P
g
un elemento de R/I como la suma de elementos de los (G/I)k es única. Supongamos
que
k∈Z k =
P
0, donde g k ∈ (R/I)k , esto es g k = gk + I para algún gk ∈ Rk . Entonces k∈Z gk ∈ I y esto implica
que ∀ k ∈ Z : gk ∈ I; por lo tanto ∀ k ∈ Z : g k = 0.
P
c) ⇒ a). Sea a = k∈Z ak un elemento
de I, con ak ∈ Rk ∀ k ∈ Z. Entonces, si ak representa la
P
clase residual de ak , se tiene que k∈Z ak = 0 en R/I. Se sigue que ∀ k ∈ Z : ak ∈ I.
∗
Ahora enunciaremos algunos hechos básicos que necesitaremos acerca de los ideales homogéneos,
cuyo desarrollo se encuentra, por ejemplo, en [ZS58] Volumen II, página 149. La suma, producto,
intersección y el radical de ideales homogéneos son ideales homogéneos. Para probar que un ideal
homogéneo p es primo, es suficiente probar que para cualesquiera dos elementos homogéneos f, g
que f g ∈ p implica f ∈ p o g ∈ p.
Transformamos el anillo de polinomios S = k[x0 , . . . , xn ] en un anillo graduado tomando la
graduación usual, obtenida al tomar el grado de cada variable xj igual a 1. Es decir, Sd será el
conjunto de todas las combinaciones lineales de monomios de grado d en las variables x0 , . . . , xn junto
con el elemento 0. Si f ∈ k[x0 , . . . , xn ] no podemos utilizarlo para definir una función en Pn porque,
como hemos visto ya, las coordenadas homogéneas no son únicas. Sin embargo, si f es un polinomio
homogéneo tal que deg f = d ≥ 1, entonces se tiene que ∀λ ∈ k ∗ : f (λa0 , . . . , λan ) = λd f (a0 , . . . , an ),
ası́ que la propiedad de que f sea cero o no depende solamente de la clase de equivalencia del punto
(a0 , . . . , an ).
A continuación, sea f0 + · · · + fr = f ∈ S, con fi ∈ Si , fr 6= 0, la descomposición única en
elementos homogéneos de un polinomio f . Supongamos que P = [a0 : · · · : an ] es un punto tal que
f (P ) = 0. Entonces, ∀ λ ∈ k ∗ : f (λa0 , . . . , λan ) = 0, por lo tanto se tiene que
f0 (a0 , . . . , an )λ0 + f1 (a0 , . . . , an )λ1 + · · · + fr (a0 , . . . , an )λr = 0.
Podemos ver a la expresión anterior como un polinomio en λ de grado menor o igual que r, el
cual se anula en una cantidad infinita de puntos, lo que implica inmediatamente que f debe ser el
polinomio idénticamente cero, i.e., ∀ i ∈ {0, . . . , r} : fi (a0 , . . . , an ) = 0. Por lo tanto, concluimos
que un polinomio se anula en un punto P ∈ Pn si, y solo si, todas y cada una de sus componentes
homogéneas se anulan en P .
La discusión anterior nos muestra que para poder hablar de las propiedades de anulación de
elementos del anillo S en el espacio proyectivo Pn , es suficiente considerarlas para polinomios homogéneos. Por lo tanto, podemos hablar del conjunto de ceros de un polinomio homogéneo f , a
saber Z(f ) := {P ∈ Pn | f (P ) = 0}. Si T es cualquier conjunto de elementos homogéneos de S,
definimos el conjunto de ceros de T como:
Z(T ) := {P ∈ Pn | ∀f ∈ T : f (P ) = 0}.
26
2.2. El Nullstellensatz Homogéneo y Conos Afines
2. Variedades Proyectivas
Si a es un ideal homogéneo de S, definimos Z(a) = Z(T ), dónde T es el conjunto de todos los
elementos homogéneos en a. Nuevamente, como S es un anillo noetheriano, todo conjunto T de
elementos homogéneos posee un subconjunto finito f1 , . . . , fm tal que Z(T ) = Z(f1 , . . . , fm ). Para
terminar, S h denotará el conjunto de elementos homogéneos del anillo S, a saber S h := {f ∈ S |∃d ∈
N : f ∈ Sd } = ∪d≥0 Sd .
Lo que haremos a continuación será sacar provecho del trabajo realizado en el capı́tulo anterior
para utilizarlo en este nuevo contexto.
Definición: Un subconjunto Y ⊂ Pn es un conjunto algebraico si existe un conjunto T ⊂ S de
elementos homogéneos tal que Y = Z(T ).
Proposición 2.2. La unión de dos conjuntos algebraicos es un conjunto algebraico. La intersección de cualquier familia de conjuntos algebraicos es un conjunto algebraico. El conjunto vacı́o
y el espacio entero son conjuntos algebraicos.
Demostración. Es análoga a la ofrecida en el caso afı́n (ver la Proposición 1.2).
∗
Definición: Definimos la topologı́a de Zariski en Pn tomando como conjuntos abiertos a los complementos de los conjuntos algebraicos.
Una vez que tengamos un espacio topológico aplicaremos las nociones de conjunto irreducible
y dimensión de un subconjunto, tal y como se definieron en el capı́tulo anterior. A continuación
adecuaremos nuestras definiciones básicas anteriores al caso proyectivo.
Definición: Una variedad algebraica proyectiva (o simplemente variedad proyectiva) es un conjunto algebraico irreducible en Pn , con la topologı́a inducida. Un subconjunto abierto de una variedad proyectiva es una variedad cuasi-proyectiva. La dimensión de una variedad proyectiva o
cuasi-proyectiva es su dimensión como espacio topológico. Si Y es cualquier subconjunto de Pn ,
definimos el ideal homogéneo de Y en k[x0 , . . . , xn ], denotado por I(Y ), como el ideal generado
por el conjunto {f ∈ S h | ∀ P ∈ Y : f (P ) = 0} (el cual resulta ser un ideal homogéneo).
Si Y es un conjunto algebraico, definimos el anillo coordenado homogéneo de Y como S(Y ) =
S/I(Y ) (vemos, sin embargo, que no podemos aplicar los mismos argumentos ofrecidos cuando
caracterizamos el anillo coordenado afı́n, pues sabemos que las funciones coordenadas usuales
n
n
{x
Li }i=0 no son funciones
L en P ). Notemos que como I(Y ) es un ideal
L homogéneo, entonces
L I(Y ) =
(I(Y
)∩S
)
=
I(Y
)
,
y
se
sigue
fácilmente
que
S(Y
)
=
(S
/I(Y
)
)
=
d
d
d
d
d≥0
d≥0
d≥0
d≥0 S(Y )d ,
i.e., S(Y ) vuelve a ser un anillo graduado.
2.2.– El Nullstellensatz Homogéneo y Conos Afines
En esta sección estableceremos una correspondencia entre los conjuntos algebraicos en Pn y los
ideales homogéneos radicales en S, de manera similar a lo que se hizo en el caso afı́n. Esto se hace
de manera casi inmediata, lo único que hay que notar es que el punto [0 : · · · : 0] no es un punto de
Pn , por lo que el conjunto de ceros del ideal homogéneo radical hx0 , . . . , xn i que lo “representa”, es
vacı́o, aunque este ideal no es el ideal trivial h1i. Por lo tanto nos vemos obligados a excluir dicho
ideal de nuestra correspondencia, razón por la cual a veces es llamado el ideal irrelevante de S.
Proposición 2.3 (El Nullstellensatz Homogéneo). Si a ⊆ S es un ideal homogéneo, y si
f ∈ S h (con deg f > 0) es tal que f (P ) = 0 para todo P ∈ Z(a) en Pn , entonces ∃ q > 0 : f q ∈ a.
27
2.2. El Nullstellensatz Homogéneo y Conos Afines
2. Variedades Proyectivas
Demostración. Consideremos a C = Z(a) como un conjunto algebraico en An+1 y tomemos
P = (a0 , . . . , an ) ∈ C, entonces como ∀ g ∈ a : g(P ) = 0, en particular ∀ g ∈ T : g(P ) = 0 , donde
T es el conjunto de elementos homogéneos en a, esto significa que [a0 : · · · : an ] ∈ Z(a) ⊆ Pn , por
lo que 0 = f ([a0 : · · · : an ]) = f (a0 , . . . , an ), y de esta manera f se anula en todos los puntos de
C ⊆ An , a continuación aplicamos el Nullstellensatz en su versión afı́n (Teorema 1.4) y vemos que
∃ q > 0 : f q ∈ a, que es lo que se deseaba demostrar.
∗
Formalizamos la idea anterior con el concepto de cono afı́n, detallado a continuación.
Definición: Un subconjunto algebraico afı́n X ⊆ An+1 es llamado cono afı́n (ver Figura 2.3 (a))
si ∀ (a0 , . . . , an ) ∈ X, ∀λ ∈ k : (λa0 , . . . , λan ) ∈ X. Si Y ⊆ Pn es un conjunto algebraico no
vacı́o, consideremos el mapeo θ : An+1 − {(0, . . . , 0)} −→ Pn dado por (a0 , . . . , an ) 7→ [a0 : . . . : an ].
Definimos el cono afı́n sobre Y (ver Figura 2.3 (b)) como:
C(Y ) := θ−1 (Y ) ∪ {(0, . . . , 0)}.
A3
A3
0
C(Y)
o
2
Y
(b)
(a)
Figura 2.3: (a) Cono afı́n. (b) Cono sobre una curva en P2 .
En otras palabras, un cono es un conjunto algebraico en An+1 que se puede escribir como una
unión (posiblemente infinita) de lı́neas que pasan por el origen. El cono sobre un conjunto algebraico
proyectivo Y se puede ver simplemente como el conjunto
C(Y ) = {(a0 , . . . , an ) ∈ An+1 | [a0 : · · · : an ] ∈ Y ⊆ Pn } ∪ {(0, 0, . . . , 0)}.
Veamos ahora que si Y es una variedad proyectiva, entonces C(Y ) es un conjunto algebraico en
An+1 . Sea P = (a0 , . . . , an ) ∈ Z(I(Y )), considerado como un conjunto algebraico en An+1 . Veamos
que ∀ f ∈ I(Y ), ∀ λ ∈ k ∗ : f (λP ) = 0. Sea λ ∈ k ∗ , entonces, por las observaciones iniciales de la
sección anterior, f (λP ) = f0 + λf1 (P ) + · · · + λr fr (P ), con fi (P ) = 0 ∀ i = 0, . . . , r, se sigue que
f (λP ) = f0 = f (P ) = 0, por lo que [a0 : · · · : an ] ∈ Y , esto nos dice que (a0 , . . . , an ) ∈ θ−1 (Y ) ⊂
C(Y ), por lo que Z(I(Y )) ⊆ C(Y ).
Recı́procamente, sea P ∈ C(Y ), tomemos f ∈ I(Y ), y sea f = f0 + · · · fr la descomposición
en elementos homogéneos de f . Ya que Y 6= ∅, f0 = 0, ası́ f (0) = 0 y 0 ∈ Z(I(Y )). Sea P =
(a0 , . . . , an ) ∈ θ−1 (Y ), ası́ θ(P ) = [a0 : · · · : an ] ∈ Y , por lo que se tiene que 0 = f ([a0 : · · · : an ]) =
f (a0 , . . . , an ), por lo que P ∈ Z(I(Y )) y C(Y ) ⊆ Z(I(Y )). De estas dos inclusiones concluimos que
C(Y ) = Z(I(Y )) y se sigue ası́ que C(Y ) es un conjunto algebraico
28
2.2. El Nullstellensatz Homogéneo y Conos Afines
2. Variedades Proyectivas
Por último, observemos que si f ∈ I(C(Y )) se anula en un punto (a0 , . . . , an ) ∈ An+1 , entonces
f se anula en toda la lı́nea que une al punto (a0 , . . . , an ) con el punto (0, . . . , 0), i.e., ∀ λ ∈ k ∗ :
f (λa0 , . . . , λan ) = 0. Sea f = f0 + · · · + fr , donde ∀ i : fi ∈ Si , la descomposición única de f en
elementos homogéneos. Entonces se tiene que ∀ λ ∈ k ∗ , ∀ i ∈ {0, . . . , r} : fi (λa0 , . . . , λan ) = 0. Pero
esto sucede si, y solo si, ∀ i ∈ {0, . . . , r} : fi ∈ I(Y ). Por lo tanto obtenemos que I(C(Y )) = I(Y ),
considerado como un ideal ordinario en el anillo S.
Observación 2.2: Notemos que en este caso los puntos no se corresponden con ideales maximales,
pues si P = [a0 : · · · : an ], entonces I(P ) = I(C(P )) y C(P ) es una recta que pasa por el origen en
An+1 , luego I(C(P )) es un ideal primo en S, aunque no es maximal. Por ejemplo, está contenido
estrictamente en el ideal maximal I(0).
Como aplicación de lo anterior, tenemos la siguiente proposición.
Proposición 2.4. Para un ideal homogéneo a ⊆ S, las siguientes condiciones son equivalentes:
a) Z(a) = ∅;
b)
√
a = S ó
√
a = S+ :=
L
d>0 Sd ;
c) ∃ d > 0 : a ⊇ Sd
Demostración.
a) ⇒ b). Si Z(a) = ∅ en Pn , entonces el cono Z(a) ⊂ An+1 , o es el conjunto vacı́o, o es el punto
√
√
{0, . . . , 0}, por lo tanto, el Nullstellensatz afı́n nos dice que a = S ó a = hx0 , . . . , xn i = S+ .
√
√
i
b) ⇒ c). Si a = S ó a = S+ , luego existen i0 , . . . , in tales que ∀ j ∈ {0, . . . n} : xjj ∈ a, a
L
continuación hacemos d = i0 + · · · + in > 0 y tenemos que a ⊇ hx0 , . . . , xn id =
d>0 Sd . Para
P
demostrar esto, sea M = xj00 · · · xjnn tal que nk=0 jk = d. Si ∀ k ∈ {0, . . . , n} : ik = jk , entonces no
hay nada que probar y M ∈ a. Supongamos pues que ∃ k ∈ {0, . . . , n} : ik 6= jk , de esta manera,
si jk > ik , se tiene que xjkk = xikk xjkk −ik ∈ a, por lo que M ∈ a. Por último, si jk < ik , entonces
∃ ` ∈ ({1, . . . , n} − {k}) : j` > i` , y en dado caso procedemos como anteriormente.
√
c) ⇒ a). Supongamos que ∃ d > 0 : Sd ⊆ a, entonces x0 , . . . , xn ∈ a pues ∀ i : xdi ∈ Sd ⊆ a, por lo
√
√
√
tanto S+ ⊆ a √
y como S+ es un ideal maximal en S, tenemos
que
a
=
S
ó
a = S+ , siendo en
√
ambos casos Z( a) = ∅. Ahora sea x ∈ Z(a) y tomemos f ∈ a, por lo tanto ∃ n ≥ 0 : f n ∈ a, ası́,
n
n
tenemos
k es un campo, esto implica que f (x) = 0, por lo tanto
√ que 0 = f (x) = (f (x)) y como
√
x ∈ Z( a) y tenemos que Z(a) ⊆ Z( a) = ∅, por lo que se tiene que Z(a) = ∅.
∗
Incluimos ahora el análogo a la Proposición 1.3 en este nuevo contexto.
Proposición 2.5.
a) T1 ⊆ T2 ⊆ S h ⇒ Z(T1 ) ⊇ Z(T2 ).
b) Y1 ⊆ Y2 ⊆ Pn ⇒ I(Y1 ) ⊇ I(Y2 ).
c) ∀ Y1 , Y2 ⊆ Pn : I(Y1 ∪ Y2 ) = I(Y1 ) ∩ I(Y2 ).
d ) Si a ⊆ S es un ideal homogéneo con Z(a) 6= ∅, entonces I(Z(a)) =
e) ∀ Y ⊆ Pn : Z(I(Y )) = Y .
29
√
a.
2.2. El Nullstellensatz Homogéneo y Conos Afines
2. Variedades Proyectivas
Demostración.
a) x ∈ Z(T2 ) ⇒ ∀ f ∈ T2 : f (x) = 0, pero T1 ⊆ T2 ⇒ f (x) = 0 ∀ f ∈ T1 , por lo tanto x ∈ Z(T1 ).
P
b) f ∈ I(Y2 ) ⇒ ∃ h1 , . . . , hn ∈ S h tales que f = ni=1 gi hi , con hi (P ) = 0 ∀ P ∈ Y2 , en particular,
como Y1 ⊆ Y2 , entonces hi (P ) = 0 ∀ P ∈P
Y1 , por lo tanto ∀ i : hi ∈ I(Y1 ), ası́ f ∈ I(Y1 ).
c) Tomemos f ∈ I(Y1 ) ∩ I(Y2 ), con f = rk=0 fk , fk ∈ Sk , fr 6= 0. Se tiene que si P ∈ Pn , entonces
f (P ) = 0 ⇔ ∀ k ∈ {1, . . . , r} : fk (P ) = 0, por esta observación, se sigue que ∀ P ∈ Pn : fk (P ) = 0,
ası́ f ∈ I(Y1 ∪ Y2 ) y se tiene I(Y1 ∪ Y2 ) ⊃ I(Y1 ) ∩ I(Y2 ).
P
Recı́procamente, sea f = rk=0 fk ∈ I(Y1 ∪Y2 ) como anteriormente y supongamos que f ∈
/ I(Y1 )
o f ∈
/ I(Y2 ); si f ∈
/ I(Y1 ), entonces existe P ∈ Y1 tal que f (P ) 6= 0, ası́ fk (P ) 6= 0 para algún
k ∈ {1, . . . , r}, pero esto es una contradicción. El caso f ∈
/ I(Y2 ) se trata de manera análoga. Por
lo tanto I(Y1 ∪ Y2 ) ⊂ I(Y1 ) ∩ I(Y2 ) y se sigue la igualdad.
√
d) Por (2.3), tenemos la inclusión I(Z(a)) ⊆ a. La otra inclusión es clara.
e) Misma demostración que en la Proposición (1.3).
∗
Teniendo en mano estos resultados, podemos ya ajustar y expresar de manera conveniente la
correspondencia que estábamos persiguiendo.
Corolario 2.6. Existe una correspondencia uno a uno que invierte el orden de las inclusiones
entre los conjuntos algebraicos en Pn y los ideales radicales homogéneos en S distintos de S+ ,
dada por
Y 7→ I(Y ) y a 7→ Z(a).
Más aún, un conjunto algebraico Y ⊆ Pn es irreducible si, y solo si, I(Y ) es un ideal primo.
Demostración. Nuevamente la primera afirmación es consecuencia directa de (2.5). Probaremos
la segunda afirmación. Si Y es irreducible, probaremos que I(Y ) es un ideal homogéneo primo. Sean
f, g ∈ S h tales que f g ∈ I(Y ), entonces Y ⊆ Z(f g) = Z(f ) ∪ Z(g), como f y g son polinomios
homogéneos, tanto Z(f ) como Z(g) son conjuntos cerrados, ası́ tenemos una descomposición de Y
como unión de subconjuntos cerrados, a saber Y = (Y ∩ Z(f )) ∪ (Y ∩ Z(g)). Como Y es irreducible,
se tiene que Y = Y ∩ Z(f ) o Y = Y ∩ Z(g), y en ambos casos concluimos que f ∈ I(Y ) o g ∈ I(Y ).
Se sigue de las observaciones realizadas al inicio del capı́tulo que I(Y ) es un ideal homogéneo primo.
Recı́procamente, sea p un ideal primo homogéneo en S, y supongamos que Z(p) = Y1 ∪ Y2 .
√
Entonces, como p es primo, p = p = I(Z(p)) = I(Y1 ∪ Y2 ) = I(Y1 ) ∩ I(Y2 ), por lo tanto se tiene
que p = I(Y1 ) o p = I(Y2 ). Ası́ Z(p) = Y1 o Z(p) = Y2 , y concluimos que es irreducible.
∗
Observación 2.3:
a) Ya que I(Pn ) = h0i ⊂ S es un ideal primo, se sigue que Pn es una variedad irreducible.
b) Notemos que si Y1 ⊇ Y2 ⊇ · · · es una cadena descendente de subconjuntos cerrados de Pn ,
entonces I(Y1 ) ⊆ I(Y2 ) ⊆ · · · es una cadena ascendente de ideales en S, y como S es noetheriano,
esta cadena se estaciona eventualmente. Nuevamente, ∀i : Yi = Z(I(Yi )), por lo que la cadena
Y1 ⊇ Y2 ⊇ · · · también es estacionaria. Por lo tanto Pn es un espacio topológico noetheriano.
c) En particular, ya que la discusión sobre espacios topológicos noetherianos ofrecida en el Capı́tulo
1 se dio en un contexto totalmente general, se sigue que todo subconjunto algebraico en Pn
se puede escribir como una unión finita de conjuntos algebraicos irreducibles (i.e., variedades
proyectivas).
Observación 2.4: Tenemos que el cono afı́n C(Y ) definido por una variedad proyectiva Y es
irreducible si, y solo si, Y lo es. Esto se sigue de manera inmediata, ya que como vimos, ambas
variedades comparten el mismo ideal I(Y ), y ambas son irreducibles si, y solo si I(Y ) es un ideal
primo en S.
30
2.3. Cubierta Afı́n y Dimensión
2. Variedades Proyectivas
2.3.– Cubierta Afı́n y Dimensión
Nuestros siguientes objetivos serán: a) probar que el n-espacio proyectivo posee una cubierta
abierta formada por n-espacios afines y, por lo tanto, toda variedad proyectiva (respectivamente
variedad cuasi-proyectiva) tiene una cubierta abierta formada por variedades afines (respectivamente
cuasi-afines), b) poder ver al espacio proyectivo como un espacio afı́n “completado” al añadir algunos
puntos al infinito y c) caracterizar la dimensión de una variedad proyectiva en términos de su anillo
coordenado homogéneo.
2.3.1.
Relación entre variedades afines y proyectivas
Si f ∈ k[x0 , . . . , xn ] es un polinomio homogéneo lineal, entonces Z(f ) es llamado un hiperplano.
En particular denotaremos el conjunto de ceros de xi por Hi , para i = 0, 1, . . . , n. Tomemos el
conjunto abierto Ui = Pn −Hi . Entonces Pn esta cubierto por los conjuntos abiertos Ui , i = 0, . . . , n,
ya que si P = [a0 : · · · : an ] es un punto, entonces ∃ i ∈ {0, . . . , n} : ai 6= 0, por lo tanto P ∈ Ui .
Definimos un mapeo ϕi : Ui −→ An como sigue: si P = [a0 : · · · : an ] ∈ Ui , entonces ϕi (P ) = Q,
donde Q es el punto con coordenadas afines
a0 a1
ai−1 ai+1
an
, ,··· ,
,
,··· ,
,
ai ai
ai
ai
ai
es decir, donde omitimos la i−ésima coordenada 1 = ai /ai . Notemos que la función ϕi está bien
definida, pues ∀ j = 0, 1, . . . , i − 1, i + 1, . . . , n, los cocientes aj /ai son independientes de la elección
de las coordenadas homogéneas elegidas.
Antes de seguir adelante, es necesario conocer algunos conceptos muy importantes que vinculan
a los conjuntos A y S h , y que serán necesarios para probar el primer resultado importante de esta
sección.
Definición: Sea A = k[y1 , . . . , yn ], dado f ∈ A de grado e, definimos la homogeneización de f (con
respecto a la variable x0 ) a ser el polinomio β(f ) := xe0 f (x1 /x0 , . . . , xn /x0 ), el cual es un polinomio
homogéneo de grado e en las variables x0 , . . . , xn . Ası́ tenemos una función β : A −→ S h .
Definición: Sea f ∈ S h , definimos la deshomogeneización de f (con respecto a la variable x0 ) a
ser el polinomio α(f ) := f (1, y1 , . . . , yn ). Por lo tanto, tenemos una función α : S h −→ A.
A continuación mencionaremos algunas propiedades que cumplen las funciones α y β definidas
anteriormente.
α Proposición 2.7.
a) ∀ f, g ∈ A : β(f g) = β(f )β(g),
b) ∀ f, g ∈ S h : α(f g) = α(f )α(g),
c) ∀ f, g ∈ S h : α(f + g) = α(f ) + α(g),
d ) α ◦ β = idA ,
e) dado f ∈ S h con f = xn0 g (donde x0 no divide a g), entonces (β ◦ α)(f ) = g.
Demostración. Todas estas afirmaciones son fáciles de demostrar, véase por ejemplo [ZS58] Volumen II, página 179.
∗
Proposición 2.8. El mapeo ϕi es un homeomorfismo de Ui con su topologı́a inducida sobre An
con su topologı́a de Zariski.
31
2.3. Cubierta Afı́n y Dimensión
2. Variedades Proyectivas
Demostración. Tenemos que la función ϕi es biyectiva (su inversa es el mapeo ψi : An −→ Ui
dado por ψi (a1 , . . . , an ) = [a1 : · · · : ai−1 : 1 : ai+1 : · · · : an ], i.e., colocando 1 en el i-ésimo lugar y
reordenando los elementos restantes), ası́ que será suficiente probar que los conjuntos cerrados de
Ui están identificados con los conjuntos cerrados de An por ϕi . Asumiremos i = 0 y escribiremos
simplemente U para U0 y ϕ : U −→ An .
A continuación sea Y ⊆ U un conjunto cerrado y sea Y su cerradura en Pn ; éste es un conjunto
algebraico , por lo que ∃ T ⊆ S h : Y = Z(T ). Supongamos que I(Y ) = hf1 , . . . , fr i, con fi ∈ S h
∀ : i = 1, . . . , r. Consideremos gi = α(fi ), i = 1, . . . , r, entonces, si P = [1 : a1 : . . . : an ],
tenemos P ∈ ϕ(Y ) ⇔ ∀ i : fi (1, a1 , . . . , an ) = 0 ⇔ ∀ i : gi (a1 , . . . , an ); por lo tanto, tenemos
Z(g1 , . . . , gr ) = ϕ(Y ).
Recı́procamente, sea W un subconjunto cerrado de An , entonces ∃ f1 , . . . fn ∈ A : W =
Z(f1 , . . . fn ). Sean gi = β(hi ), tomemos P ∈ ϕ−1 (W ) ⊆ U , es fácil demostrar que gi (P ) =
fi (ϕ(P )) = 0, luego ϕ−1 (W ) ⊆ U ∩ Z(g1 , . . . , gn ); análogamente, sea P ∈ U ∩ Z(g1 , . . . , gn ),
entonces se tiene que 0 = gi (P ) = fi (ϕ(P )), lo cual indica que P ∈ ϕ−1 (W ), ası́, tenemos que
ϕ−1 (W ) = U ∩ Z(g1 , . . . , gn ). Por lo tanto, ϕ y ϕ−1 son ambas funciones cerradas y concluimos que
ϕ es un homeomorfismo.
∗
Corolario 2.9. Si Y es una variedad proyectiva (respectivamente cuasi-proyectiva), entonces Y
está cubierta por los conjuntos abiertos Y ∩ Ui , i = 0, 1 . . . , n, los cuales son homeomorfos a
variedades afines (respectivamente cuasi-afines) vı́a el mapeo ϕi definido anteriormente.
Demostración. Se sigue inmediatamente de la proposición anterior.
∗
Observación 2.5: Siguiendo con la visualización inicial de los espacios proyectivos, después de
haber hecho nuestra discusión geométrica intuitiva, en esta parte hemos visto que para todo i ∈
{0, . . . , n}, Ui es homeomorfo a An , por lo que efectivamente podemos visualizar a An como un
subconjunto abierto denso de Pn al identificarlo, por ejemplo, con el complemento del hiperplano
H0 = Z(x0 ) en Pn . En este caso, el hiperplano H0 = {[a0 : · · · : an ] ∈ Pn | a0 = 0} es llamado el
hiperplano al infinito respecto de An = U0 , y forma automáticamente un nuevo espacio proyectivo de
menor dimensión (Pn−1 ). En caso de que nuestro campo base sean los números complejos C, entonces
se puede demostrar que PnC es compacto, y por lo tanto es de manera natural una compactificación
del espacio afı́n n-dimensional AnC . (Ver [S+ 00], página 31).
Sea Y ⊆ An una variedad afı́n. Al identificar a An con el conjunto abierto U0 ⊂ Pn vı́a el
homomorfismo ϕ0 , podemos hablar de Y , la cerradura de Y en Pn , la cual se conoce como la
cerradura proyectiva de Y .
2.2 Ejemplo (La Cerradura Proyectiva de una Variedad Afı́n): Probar que I(Y ) es el ideal generado por β(I(Y )), utilizando la notación de la demostración ofrecida en (2.8). En este
caso se dice que I(Y ) es la homogeneización del ideal I(Y ).
Comencemos considerando a el ideal generado por β(I(Y )) y tomemos G ∈ a, el cual tiene la forma
G(x0 . . . , xn ) =
r
X
xk0 gk (x1 /x0 , . . . , xn /x0 ), con gk ∈ I(Y ) de grado k, ∀ k = 0, . . . r,
k=0
Pr
ası́, tenemos que G(1, x1 , . . . , xn ) =
k=0 gk (x1 , . . . , xn ) = g ∈ I(Y ), por lo tanto, como U0 =
Pn − Z(x0 ), tenemos que G|U0 = g, por lo que G se anula en Y = Y ∩ U0 y con esto Y ⊆ Z(a) el
cual es un conjunto cerrado, por lo tanto Y ⊆ Z(a).
32
2.3. Cubierta Afı́n y Dimensión
2. Variedades Proyectivas
Recı́procamente, sea G ∈ I(Y ) un polinomio homogéneo de grado e, en particular, G se anula
en Y = Y ∩ U0 , ası́, el polinomio G(1, x1 , . . . , xn ) = g ∈ I(Y ) pero, por definición, β(g) ∈ a.
Sea k la máxima potencia tal que G = xk0 H, k ∈ N ∪ {0}, ası́, H es homogéneo de grado e − k y
G(1, x1 , . . . , xn ) = H(1, x1 , . . . , xn ) = g, como x0 ya no es factor común de H, éste posee un monomio
de grado e − k que no envuelve a la variable x0 , luego β(g) = xe−k
0 g(x1 , . . . , xn ) es homogéneo de
grado e − k, el cual debe ser H, ası́ H = β(g) y G = xk0 β(g) ∈ a; por lo que tenemos I(Y ) ⊆ a lo
cual implica Y ⊇ Z(a).
Por último probaremos que si un ideal a es radical, entonces su homogeneización también es un
ideal radical. Para esto es suficiente ver que si una potencia de un polinomio homogéneo está en
la homogeneización, entonces el polinomio también lo está. Sea a un ideal radical y a su homogeneización, sea G(xo , . . . , xn ) homogéneo de grado
que ∃ n ∈ N tal que Gn (x0 , . . . , xn ) ∈ a, es
Pr e tal
k
n
fácil ver que G (1, x1 , . . . , xn ) ∈ a (pues G = k=o xo gk (x1 /x0 , . . . , xn /x0 ) con gk ∈ a∀ k), luego,
como a es radical, G(1, x1 , . . . , xn ) = g ∈ a. A continuación sea β(g) ∈ a la homogeneización de g,
entonces nuevamente ∃ m ∈ N : G(x0 , . . . , xn ) = xm
o β(g) ∈ a.
Como aplicación del ejemplo anterior, tenemos que si Y es una variedad afı́n irreducible, entonces
su cerradura proyectiva Y es irreducible. Para esto, sean f, g ∈ S h : f g ∈ I(Y ), entonces ∃h ∈ I(Y ) :
f g = β(h), pero esto dice que α(f g) = α(f )α(g) = (α ◦ β)(h) = h ∈ I(Y ), por lo que α(f ) ∈ I(Y ) o
α(g) ∈ I(Y ), pero existen n, m ∈ N tales que f = xn0 (β ◦ α)(f ) ∈ I(Y ) y g = xm
0 (β ◦ α)(g) ∈ I(Y ).
Esto dice que I(Y ) es un ideal primo homogéneo, por lo que Y es una variedad proyectiva irreducible.
2.3 Ejemplo (La Cerradura Proyectiva de la Cúbica Torcida): Tomemos Y la curva cúbica torcida (Ver Ejemplo 1.19), sabemos que Y = Z(x2 − x21 , x3 − x31 ) en A3 . Si consideramos
la variedad proyectiva X definida por la homogeneización de estos polinomios, obtenemos que
X = Z(x0 x2 − x21 , x3 x20 − x31 ) en P3 . Es fácil ver que X ∩ U0 = Y . Por otra parte, en el plano
al infinito Z(x0 ), tenemos que X ∩ Z(x0 ) = Z(x0 , x1 ), por lo que X = Y ∪ Z(x0 , x1 ), lo cual no es
un conjunto algebraico irreducible, por lo que no puede ser la cerradura proyectiva de la variedad
Y . Por lo tanto, si I(Y ) = hf1 , . . . , fr i, entonces no necesariamente se tiene que β(f1 ), . . . , β(fr )
generan a I(Y ).
Por otra parte, tenemos que x1 x3 − x22 ∈ I(Y ), y como este polinomio ya es homogéneo, podemos
añadirlo a los polinomios que definen a X para obtener X 0 = Z(x2 x0 −x21 , x3 x20 −x31 , x1 x3 −x22 ) ⊆ X.
Nuevamente X 0 ∩U0 = Y , y fácilmente se ve que X 0 ∩Z(x0 ) = [0 : 0 : 0 : 1], i.e., ahora la intersección
con el plano al infinito es solamente un punto. Por lo tanto, X 0 = Y ∪ {P }, por lo que tenemos una
variedad proyectiva más pequeña, la cual se restringe a nuestra cúbica torcida en el conjunto U0 .
Utilizando Bases de Gröbner, se puede demostrar ([CLO97], Capı́tulo 8, §4.) que X 0 es la cerradura
proyectiva de nuestra curva cúbica torcida Y .
2.3.2.
Dimensión
Dado que hemos cubierto los dos primeros puntos de nuestra agenda, a continuación relacionaremos la dimensión de una variedad proyectiva con la dimensión de su anillo coordenado homogéneo.
Pero antes, necesitaremos un resultado algebraico que hará más clara la exposición.
Proposición 2.10. Sea B = k[x1 /x0 , . . . , xn /x0 ] y Ω := {f /g ∈ coc S | f, g ∈ S h , g 6=
0 y deg f = deg g}. Entonces B es isomorfo a un anillo de polinomios en n variables con
coc B = Ω.
Demostración. Es fácil ver que Ω es un anillo conmutativo con identidad, donde si f /g ∈ Ω con
f 6= 0, entonces (f /g)−1 = g/f . Ası́ Ω es un campo, y claramente se tiene que B ⊆ Ω. De esto
concluimos que coc B ⊆ Ω. A continuación, sea f /g ∈ Ω, entonces f y g son polinomios homogéneos
33
2.3. Cubierta Afı́n y Dimensión
2. Variedades Proyectivas
del mismo grado (digamos m) en S. Ası́, en coc S tenemos
que
f
g
=
f /xm
0
g/xm
0
f
g
=
f /xm
0
,
g/xm
0
m
pero f /xm
0 , g/x0 ∈ B, por lo
∈ coc B. Esto significa que Ω ⊆ cocB, y tenemos ası́ la igualdad buscada coc B = Ω.
A continuación, definimos el k-homomorfismo
ψ : k[y1 , . . . , yn ] −→ k[x1 /x0 , . . . , xn /x0 ] por
Pr
yi →
7 xi /x0 . Sea f ∈ Ker ψ, donde f = j=0 fj , fi ∈ Si , fr 6= 0. Ası́, tenemos que
0 = f (x1 /x0 , . . . , xn /x0 ) =
r
X
fj (x1 /x0 , . . . , xn /x0 ) =
j=0
r
X
1
j=0
xj0
fj (x1 , . . . , xn ).
P
Multiplicando ambos lados de la ecuación anterior por xr0 , obtenemos que rj=0 xr−j
0 fj (x1 , . . . , xn ) =
0. Como este polinomio es el polinomio cero, lo sigue siendo aún cuando hacemos x0 = 0, pero esto
implica que fr (x1 , . . . , xn ) es el polinomio 0, lo cual es una contradicción. Se sigue que Ker ψ = {0}
y por lo tanto ψ es un isomorfismo.
∗
En la Proposición 1.12 fue relativamente fácil probar que si Y es un conjunto algebraico afı́n,
entonces dim Y = dim A(Y ). El correspondiente resultado para variedades proyectivas (el cual es
más difı́cil de probar) es que si Y es una variedad proyectiva, entonces dim Y = dim S(Y ) − 1. Lo
que haremos a continuación será probar ésta afirmación.
2.4 Ejemplo: Si Y es una variedad proyectiva con anillo coordenado homogéneo S(Y ), mostrar
que dim S(Y ) = dim Y + 1.
Primero, recordemos el hecho de que la formación de fracciones es una operación “exacta” (ver
[AM69] página 39). Especı́ficamente, si 0 → M 0 → M → M 00 → 0 es una sucesión exacta de
R-módulos y T ⊂ R es un subconjunto multiplicativamente cerrado de R, entonces la sucesión
0 → T −1 M 0 → T −1 M → T −1 M 00 → 0 también es exacta. Utilizaremos esta observación para la
siguiente sucesión exacta de S-módulos
0 → I(Y ) → S → S(Y ) → 0.
A continuación trabajaremos con las variedades cuasi-proyectivas Yi := Y ∩ Ui . Si Y es no vacı́a, entonces ∃ i ∈ {0, . . . , n} : Yi 6= ∅. Sin pérdida de generalidad, supongamos que Y0 6= ∅ y consideremos
el subconjunto multiplicativamente cerrado T = {xn0 }n≥0 .
Veamos a los anillos de la sucesión exacta anterior como subanillos inmersos dentro del campo de
cocientes de S, k(x0 , . . . , xn ). Ası́, se tiene por la proposición anterior que
−1
−1
Sx0 = k[x1 , . . . , xn ][x0 , x−1
0 ] = k[x1 /x0 , . . . , xn /x0 ][x0 , x0 ] = B[x0 , x0 ],
L
j
donde B = k[x1 /x0 , . . . , xn /x0 ]. Vemos que Sx0 es un anillo Z−graduado, Sx0 = ∞
j=−∞ Bx0 .
L∞
A continuación veremos que (I(Y ))x0 =
j=−∞ I(Y0 )x0 . Primero notemos que como Y es
irreducible y Y0 es un subconjunto abierto no vacı́o de Y , entonces Y0 es denso en Y . Se sigue que
∀ f (x0 , . . . , xn ) ∈ S h , f se anula en Y si, y solo si, α(f ) = f (1, x1 /x0 , . . . , xn /x0 ) se anula en Y0 .
Ahora, los elementos de I(Y )x0 de grado r ∈ Z son de la forma f /xm
0 , donde f ∈ I(Y )s y m ≥ 0
m
s
−r
s
cumplen s−m = r. A continuación,
f /x0 = (f /x0 )xo , con f /x0 = f (1, x1 /x0 , . . . , xn /x0 ) ∈ I(Y0 ),
L
por lo que (I(Y ))x0 ⊆ ∞
I(Y
)
0
x0 .
j=−∞
Una vez hechas estas observaciones, obtenemos
Sx0 /I(Y )x0 ∼
= (S/I(Y ))x0 ∼
= (B/I(Y0 ))[x0 , x−1
0 ].
34
2.3. Cubierta Afı́n y Dimensión
2. Variedades Proyectivas
∼ k[x1 , . . . , xn ]/I(Y0 ), y este es el anillo coordenado de Y0 , que hemos denotado
Ahora, B/I(Y0 ) =
por A(Y0 ). Juntando todo se tiene que S(Y )x0 ∼
= A(Y0 )[x0 , x−1
0 ].
Por el Ejemplo 1.9, tenemos que S(Y )x0 ∼
= A(Y0 )[α, β]/ hαβ − 1i, la cual es una k−álgebra finitamente generada, ya que A(Y0 ) lo es. Además, es claro que el grado trascendencia del campo de
cocientes de A(Y0 )[x0 , x−1
0 ] sobre k es el mismo que el grado de trascendencia de A(Y0 )(x0 ) sobre k.
También notamos que S(Y ) ⊆ S(Y )x0 ⊆ coc S(Y ), por lo que S(Y )x0 es una k-álgebra finitamente
generada con el mismo campo de cocientes que S(Y ). Por (1.13), tenemos que
dim S(Y ) = dim S(Y )x0 = dim A(Y0 )[x0 , x−1
0 ] = dim Y0 + 1.
Repitiendo el proceso anterior para i = 0, . . . , n tal que xi ∈
/ I(Y ) (i.e., Y ∩ Ui 6= ∅), tenemos
que dim S(Y ) = dim A(Yi ) + 1. A continuación notamos que cada Yi es un conjunto abierto,
y que Y = ∪ni=0 Yi , ası́, por el Ejemplo 1.17, dim Y = supi dim Yi = dim Y0 . Concluimos que
dim S(Y ) = dim Y +1. Asimismo, vemos también que siempre que Yi 6= ∅, se tiene dim Y = dim Yi .
El ejemplo anterior nos permitirá extender a las variedades proyectivas algunos resultados previamente obtenidos para variedades afines.
2.5 Ejemplo:
1. La dimensión de Pn es n. En efecto, tenemos que I(Pn ) = h0i, ası́ S(Pn ) = S/ h0i ∼
= S, y por
n
n
el Ejemplo 2.4, n + 1 = dim S(P ) = dim P + 1, de donde se sigue el resultado.
2. Si Y ⊆ Pn es una variedad cuasi-proyectiva, entonces dim Y = dim Y .
Ya que Y ⊆ Y , se sigue por el Ejemplo 1.17 que dim Y ≤ dim Y . Recı́procamente, como
dim Pn = n, en particular dim Y < ∞ y dim Y < ∞, digamos dim Y = r y dim Y = s. Sea
∅ 6= Z0 ( Z1 ( · · · ( Zr una cadena maximal de subconjuntos cerrados irreducibles de Y .
Entonces Z0 debe ser un punto {P } ⊂ Y (de lo contrario, la cadena se podrı́a extender aún
más y no serı́a maximal). De los hechos topológicos 1 y 2 de la demostración de la Proposición
(1.15), se sigue que {P } = Z 0 ( · · · ( Z m es una cadena de subconjuntos cerrados irreducibles
en Y . Por la minimalidad del conjunto {P } y como S+ es un ideal maximal en S, se sigue
que la cadena de ideales primos I(P ) ( S+ ( S es saturada (i.e., no podemos insertar ningún
otro ideal primo no trivial, véase [Mat89] página 31), ası́ obtenemos que dim S/I(P ) = 1.
A continuación, sea a := I(P )/I(Y ) ⊂ S/I(Y ), por el segundo teorema de isomorfismo para
anillos, se tiene que S(P ) ∼
= S(Y )/a, por lo que por (1.13), se tiene que
ht a = dim S(Y ) − dim S(P ) = s + 1 − 1 = s.
Por lo tanto podemos hallar una cadena de ideales primos en S(Y ) de longitud s, la cual
comienza con I(P ), a saber I(P ) ) p1 ) · · · ) ps . Aplicando la operación Z, obtenemos
{P } ( Z(p1 ) ( · · · ( Z(ps ), que es una cadena de subconjuntos irreducibles de Y . Como
P ∈ Y , se sigue que ∀ i ∈ {1, . . . , s} : Z(pi ) ∩ Y 6= ∅, por lo tanto, por el hecho topológico 1
de (1.15), obtenemos que {P } ( Z(p1 ) ∩ Y ( · · · ( Z(ps ) ∩ Y es una cadena de subconjuntos
cerrados irreducibles de Y de longitud s. Pero como r = dim Y , se sigue que dim Y = s ≤
r = dim Y . Esto completa la demostración.
2.6 Ejemplo: Una variedad proyectiva Y ⊆ Pn tiene dimensión n − 1 si y solo si es el conjunto de
ceros de un solo polinomio homogéneo irreducible f de grado positivo.
En efecto, sea f ∈ S un polinomio homogéneo irreducible de grado positivo. Ya que todo polinomio
no constante en S tiene una raı́z, se tiene que Y 6= ∅. Pero S es un DFU, entonces f es primo y
35
2.4. La Inmersión d-ésima de Veronese
2. Variedades Proyectivas
por lo tanto hf i es un ideal primo. Sea Y = Z(f ), ası́ I(Y ) = hf i y por (2.6), Y es irreducible, por
lo tanto Y es una variedad proyectiva. A continuación, vemos que f no es cero ni es una unidad,
entonces por (1.16) ht hf i = 1, y por (1.13) y el Ejemplo 2.4 se sigue que
ht I(Y ) = n + 1 − dim Y = n + 1 − n = 1.
Por lo tanto ht I(Y ) = 1. Como S es un Dominio de Factorización Única, por (1.17) se tiene que
I(Y ) = hf i, donde f es un polinomio homogéneo irreducible. Por (2.6), Z(f ) = Z(I(Y )) = Y = Y ,
i.e., Y = Z(f ). Por ultimo, ya que dim Y = n − 1, se sigue que deg f > 0.
Recı́procamente, supongamos que dim Y = n − 1. Por (2.6) tenemos que I(Y ) es un ideal primo
en S, además, por el Ejemplo 2.4, se tiene que dim S(Y ) = dim Y + 1. Aplicando (1.13) tenemos
que dim Y = n + 1 por lo que ht I(Y ) = n + 1 − n = 1, ası́ corresponde a un ideal primo de altura
1, como S es DFU, por (1.17), I(Y ) es principal, necesariamente generado por un solo polinomio
irreducible homogéneo, digamos f , y ası́ Y = Z(f ).
Observación 2.6: Tenemos que el tomar el cono afı́n sobre una variedad proyectiva aumenta la
dimensión del objeto en 1. De manera más precisa, como A(C(Y )) = k[x0 , . . . , xn ]/I(Y ) = S(Y ),
se tiene que dim C(Y )=dim A(C(Y ))=dim S(Y ) =dim Y +1.
2.4.– La Inmersión d-ésima de Veronese
En esta sección estudiaremos las propiedades de una construcción clásica en Geometrı́a Algebraica, la cual encaja de manera no trivial un espacio proyectivo como un subconjunto algebraico
de otro espacio proyectivo de mayor dimensión. Estudiaremos algunos ejemplos de aplicación en
dimensiones bajas y analizaremos la conexión que existe con la cerradura proyectiva de ciertas
variedades afines que ya hemos estudiado previamente.
Proposición 2.11. Para n, m > 0 dados, hay
x0 , . . . , xn .
m+n
n
monomios de grado m en las n+1 variables
Demostración. Esto se puede probar por inducción sobre m + n. Si m = 0 = n, entonces 00 = 1,
lo cual es correcto. Cualquier polinomio homogéneo de grado m en n+1 variables f se puede escribir
de manera única como
f (x0 , x1 . . . , xn ) = f1 (x1 , . . . , xn ) + x0 f2 (x0 , . . . , xn ),
donde f1 es homogéneo de grado m y f2 homogéneo de grado m − 1. Notemos que f1 es homogéneo
de grado m en n variables y f2 es homogéneo
de grado
m − 1 en n + 1 variables. Aplicando la
n
hipótesis de inducción y sabiendo que nk + k−1
= n+1
k , se sigue que el número de monomios de
grado m en n + 1 variables es
m+n−1
m+n−1
m+n
+
=
,
m
m−1
m
∗
que es lo que se querı́a demostrar.
A continuación, sean M0 , M1 , . . . , MN (N = n+d
− 1) todos los monomios de grado d en las
n
variables x0 , . . . xn , y definimos un mapeo ρd : Pn −→ PN dado por P = [a0 : · · · : an ] 7→ [M0 (P ) :
· · · : MN (P )]. Este mapeo es conocido como la inmersión d-ésima de Pn en PN .
Propiedades del mapeo ρd .
36
2.4. La Inmersión d-ésima de Veronese
2. Variedades Proyectivas
Si θ : k[y0 , · · · , yN ] −→ k[x1 , · · · , xn ] es el homomorfismo definido por ∀ i : yi →
7 Mi y
si a = Ker θ, entonces a es un ideal homogéneo primo, y por ende Z(a) es una variedad
proyectiva en Pn .
Demostración. Primero observamos
que θ|k = idk , luego si f ∈ a, entonces la parte consP
tante de f es cero. Sea f = ri=1 fi ∈ a con fi ∈ k[y0 , . . . , yN ]i (los elementos homogéneos
de grado i). Entonces θ(f ) = gd + g2d + · · · + grd = 0, con g` ∈ S` , entonces tenemos que
θ(f1 ) = gd = · · · θ(fr ) = grd = 0, luego
P fi ∈ a∀ i = 1, . . . , r; recı́procamente es fácil ver
que si f1 , . . . , fs ∈ a, entonces f =
fi ∈ a, luego a es homogéneo, por último, como
∼
k[y0 , . . . , yN ]/a = Im θ ⊂ k[x0 , . . . , xn ] y todo subanillo de un dominio entero es un dominio
entero, entonces a es primo.
Im ρd = Z(a).
Demostración. Tomemos P ∈ Im ρd y f ∈ a, tenemos que ∃ Q ∈ Pn : P = [M0 (Q) : · · · :
MN (Q)], ası́ f (P ) = θ(f )(Q), pero como θ(f ) = 0 entonces f (P ) = 0, por lo tanto P ∈ Z(a).
Recı́procamente, sea I := {(i0 , . . . , in ) | ik ∈ N ∪ {0}, i0 + · · · + in = d} y numeremos las
coordenadas de PN por yi0 ···in , donde (i0 , . . . , in ) ∈ I . De esta manera, tenemos que cada uno
de los monomios Mi indexa a una variable de PN , y que
∀ (i0 , . . . , in ) ∈ I : θ(yi0 ···in ) = xi00 · · · xinn ,
ası́, definimos el conjunto Γ por
Γ := {yi0 ···in yj0 ···jn − yk0 ···kn y`0 ···`n | i0 + j0 = k0 + `0 , . . . , in + jn = kn + `n }.
Observamos que Γ ⊆ Ker θ, por lo que Z(Ker θ) ⊆ Z(Γ). Definimos ∀ i ∈ {0, . . . , n}, Wi ⊆ PN
como el conjunto abierto en el cual la coordenada indexada por el monomio xm
i es distinta de
cero, i.e.,
Wi := {[· · · : ai0 ···in : · · · ] | aαi 6= 0}, αi = (0, · · · , 0, |{z}
d , 0, · · · , 0).
lugar i
De la definición del conjunto Γ, se sigue que ∀ P = [· · · : ai0 ···in : · · · ] ∈ Z(Γ) ∃ i ∈ {0, . . . , n} :
ρd (P ) ∈ Wi , por lo tanto, {Wi } es una cubierta abierta de Z(Γ). Supongamos i = 0, por lo
que estaremos trabajando en el subconjunto abierto ad0···0 6= 0, entonces, vemos que
ρd ([ad,0,0,··· ,0 : ad−1,1,0···0 : · · · : ad−1,0,··· ,1,0 : ad−1,0,··· ,0,1 ]) = P,
por lo tanto, tenemos que P ∈ Im ρd , ası́ concluimos que Z(Ker θ) ⊆ Z(Γ) ⊂ Im ρd , y se sigue
que Im ρd = Z(a).
Ası́, tenemos una familia de mapeos ψi : Wi −→ Pn que son compatibles en las intersecciones
de los conjuntos Wi , de manera que podemos definir una función inversa global ψ para ρd en
términos de funciones localmente polinomiales.
ρd define un homeomorfismo de Pn sobre su imagen Z(a).
En primera instancia, notemos que este mapeo tiene la siguiente interpretación: sea P =
[a0 : · ·P
· : an ] ∈ Pn , el cual podemos visualizar como los coeficientes de un polinomio lineal
LP = ni=0 ai xi (bien definido salvo multiplicación por cualquier escalar distinto de cero),
37
2.4. La Inmersión d-ésima de Veronese
2. Variedades Proyectivas
entonces las coordenadas de ρd (P ) son los coeficientes del polinomio homogéneo LdP omitiendo
los coeficientes binomiales. Aquı́ observemos que si ∀ λ ∈ k ∗ : LP 6= λLQ , entonces ∀ λ ∈ k ∗ :
LdP 6= λLdQ , pues S es un DFU, por lo tanto, tenemos que ρd es una función inyectiva y con
lo demostrado en el inciso anterior, tenemos que ρd es biyectiva. Como ambas funciones están
dadas en términos de polinomios, se sigue que son continuas bajo la topologı́a de Zariski, y
de esta manera se tiene que
La curva cúbica torcida Y en P3 es igual a ρ3 (P1 ) para una elección adecuada de coordenadas.
Previamente (Ejemplo 2.3) encontramos que Y = Z(yw − x2 , zw2 − x3 , xz − y 2 ). Eligiendo las
coordenadas de P3 de manera que ρ3 ([s : t]) = [s3 : s2 t : st2 : t3 ] = [w : x : y : z], se tiene que
ρ3 (P1 ) ⊆ Y . Recı́procamente, ya que Y = {[1 : t : t2 : t3 ] | t ∈ k} ∪ {[0 : 0 : 0 : 1]}, tenemos
que ∀ t ∈ k : ρ3 ([1 : t]) = [1 : t : t2 : t3 ], y ρ3 ([0 : 1]) = [0 : 0 : 0 : 1], por lo tanto ρ3 (P1 ) ⊆ Y y
concluimos que deben ser iguales.
Ahora daremos algunos ejemplos de aplicación de este mapeo.
2.7 Ejemplo (La cerradura proyectiva de la parábola): Consideremos la inmersión 2-ésima
de P1 dada por [a0 : a1 ] 7→ [a20 : a0 a1 : a21 ] ∈ P2 . A continuación probaremos que ρ2 (P1 ) =
Z(x21 − x2 x0 ). La inclusión ρ2 (P1 ) ⊆ Z(x21 − x2 x0 ) es inmediata. Sea [x : y : z] ∈ Z(x21 − x2 x0 ),
entonces necesariamente tenemos que x 6= 0 o z 6= 0, pues si ambos fuesen cero, entonces la
relación x21 = x0 x2 implicarı́a también que y = 0, lo cual es imposible. Si x 6= 0, vemos que
ρ2 ([x : y]) = [x2 : xy : y 2 ] = [x : y : z], pues [x : y : z] = [x2 : xy : xz] = [x2 : xy : y 2 ]. De manera
análoga, si z 6= 0, entonces ρ2 ([y : z]) = [x : y : z]. Concluimos que ρd (P1 ) = Z(x21 − x2 x0 ).
Tenemos que ρ2 (P1 ) ∩ U0 = Z(x21 − x2 ) representa una parábola inmersa en P2 (ver Figura 2.4).
En este caso, ρ2 (P1 ) representa la cerradura proyectiva de la parábola, la cual está
dada por la
homogeneización del polinomio que define la variedad afı́n, i.e., en este caso I(Y ) = β(x21 − x2 ) ,
lo que no pudimos obtener con la cerradura proyectiva de la curva cúbica torcida.
x0
2
U0
x2
x1
Figura 2.4: Cerradura proyectiva de la parábola x21 = x2 en P2 .
38
2.5. La Inmersión de Segre
2. Variedades Proyectivas
2.5.– La Inmersión de Segre
A continuación veremos un ejemplo de variedad determinantal. Especı́ficamente una variedad
2
determinantal es el conjunto en k n de todas las matrices de rango a lo sumo k, donde k ∈ N. Si
2
k ≥ n, la variedad determinantal es el espacio completo k n , pero si k < n, el rango de la matrı́z A
es a lo sumo k si, y solo si, todos sus subdeterminantes de orden (k + 1) × (k + 1) se anulan.
Sea ψ : Pr × Ps −→ PN el mapeo definido por
(P = [a0 : · · · : ar ], Q = [b0 : · · · : bs ]) 7→ [a0 b0 : · · · : a0 bs : a1 b0 : · · · : a1 bs : · · · : ar b0 : · · · : ar bs ],
donde N = r + s + rs. Notemos que ψ está bien definida y que es inyectiva, ya que no todas las
coordenadas de P y Q son simultáneamente iguales a cero, además (∀λ ∈ k ∗ )(∀P, Q) : ψ(λP, λQ) =
λ2 ψ(P, Q). ψ se conoce como la Inmersión de Segre. Nuestro objetivo será demostrar que Im (ψ)
es una subvariedad de PN .
Veamos que ψ está bien definida, es claro que ψ no se anula en todos los puntos de su imagen.
A continuación sean α, β ∈ k ∗ , entonces
ψ([αa0 : · · · : αar ], [βb0 : · · · : βbs ]) = αβ[· · · : ai bj · · · ] = ψ([a0 : · · · : ar ], [b0 : · · · : bs ]).
Veamos ahora que ψ es inyectiva, sean pues A = [a0 : · · · : ar ], B = [b0 : · · · : bs ], C = [c0 : · · · : cr ]
y D = [d0 : · · · : ds ] tales que ψ(A, B) = ψ(C, D), esto es [· · · : ai bj : · · · ] = λ[· · · : ci dj : · · · ]
para algún λ ∈ k ∗ , podemos hallar un bk 6= 0 y un dj 6= 0, entonces, en particular tenemos que
λd
∀ i ∈ {0, . . . , r} : bk ai = λdj ci , i.e., ai = bkj ci y esto nos dice que A = C, se procede de manera
análoga para mostrar que B = D, por lo que ψ es una inmersión.
Para entender mejor esta función, es útil renombrar las coordenadas del espacio PN por {zij | i =
0, . . . , r, j = 0, . . . , s}, y pensamos en los puntos Z ∈ PN como matrices de dimensión (r+1)×(s+1),
i.e., si Z = ψ(X, Y ), tenemos
Z=
z00 z01 · · ·
z10 z11 · · ·
..
..
..
.
.
.
zr0 zr1 · · ·
z0s
z1s
..
.
=
zrs
x0
x1
..
.
·
y0 y 1 · · ·
ys
.
xr
Observemos que una matriz A = (aij ) 6= 0, 1 ≤ i ≤ m, 1 ≤ j ≤ n tiene rango 1 si, y solo si,
todos los subdeterminantes de orden 2 de A se anulan, i.e., si ∀i, k ∈ {1, . . . , n}, j, ` ∈ {1, . . . , m} :
aij ak` − ai` akj = 0. Para ver esto, supongamos que A 6= 0 tiene rango 1, entonces existe una fila de
A (la cual, sin pérdida de generalidad, podemos suponer que es la fila 1) (a11 , . . . , a1n ), donde no
todos los a1i son iguales a cero, tal que ∀ i ∈ {1, . . . , m} ∃ λi ∈ k : (ai1 , . . . , ain ) = (λi a11 , . . . , λi a1n ).
Es claro entonces que si seleccionamos cualesquiera dos filas i, k de A y cualesquiera dos columnas
j y ` de A, entonces aij ak` − ai` akj = λi λk aij ak` − λi λk aij ak` = 0.
Recı́procamente, supongamos que una matriz A = (aij ) 6= 0 de dimensión m×n es tal que ∀i, k ∈
{1, . . . , n}, ∀ j, ` ∈ {1, . . . , m} : aij ak` − ai` akj = 0, entonces, sin pérdida de generalidad, podemos
suponer que (a11 , . . . , a1n ) posee un elemento no nulo, digamos a11 . Sea (ai1 , . . . , ain ) cualquier otra
fila no nula de A, digamos aij 6= 0, si j = 1 y todas las demás aij son cero, hemos terminado, de lo
contrario,
otra entrada aij con j 6= 1, entonces tenemos que a11 aij = a1j ai1 6= 0, por lo que
elegimos
ai1 =
aij
a1j
a11 6= 0. A continuación nos fijamos en todos los términos de la forma a11 aik − a1k ai1 ,
39
2.5. La Inmersión de Segre
2. Variedades Proyectivas
i1
k = 2, 3, . . . , m y vemos que aik = aa11
a1k , por lo que se sigue que (ai1 , . . . , ain ) es combinación
lineal de (a11 , . . . , a1n ) y por lo tanto, A tiene rango 1.
De las observaciones anteriores, se desprende el siguiente resultado importante.
Teorema 2.12. Im ψ es una variedad proyectiva correspondiente a las matrices de rango 1 en
PN .
Demostración. Im ψ consiste de las entradas de la matriz Z de dimensión (r+1)×(s+1) obtenida
al multiplicar las matrices [x0 : · · · : xr ]T · [y0 : · · · : xs ]. En particular, cada columna de Z es un
múltiplo de todas las demás, lo que dice que Z tiene rango 1.
Por otra parte, supongamos que un punto Z ∈ PN satisface las ecuaciones zij zk` − zi` zkj ∀ i, k ∈
{0, . . . , r}, ∀ j, ` ∈ {0, . . . , s}, que, como vimos anteriormente, equivale a decir que la matriz Z tiene
rango 1. Pero toda matriz de dimensión (r + 1) × (s + 1) de rango k se factoriza como un producto
de una matriz de dimensión (r + 1) × k por una matriz de dimensión k × (s + 1).
Para probar esto, supongamos que A es una matriz de dimensión (r + 1) × (s + 1) de rango k
sobre un campo F , entonces sabemos que A es equivalente por filas a una matriz B de dimensión
(r +1)×(s+1) con k vectores linealmente independientes en la parte superior, y siendo los restantes
r +1−k vectores inferiores cero. Esto es, existe una matriz invertible E de dimensión (r +1)×(r +1)
tal que EA = B. Desde luego, esta relación implica que A = E −1 B y, ya que las últimas r + 1 − k
filas de B son cero, podemos eliminar sin problemas las últimas r +1−k columnas de E, ası́ como las
r + 1 − k últimas filas de B, para obtener la descomposición A = E 0 B 0 , donde E 0 es de de dimensión
(r + 1) × (k) y rango k, y B 0 es de dimensión (k) × (s + 1) y de rango k, tales que A = E 0 B 0 , lo cual
finaliza la prueba.
En particular, ∃ X = [x0 : · · · : xr ], Y = [y0 : · · · : ys ] determinados salvo múltiplo escalar tales
que Z = X T Y . Como Z nunca es la matriz cero, entonces ni X ni Y pueden ser el vector cero. Ası́,
P ∈ Im ψ.
∗
Este hecho nos permite considerar el producto de dos espacios proyectivos como una variedad
proyectiva. En particular, nos da una topologı́a (de Zariski) en Pn × Pm (que en general no es la
topologı́a producto, ver la página 45).
2.8 Ejemplo (La superficie cuádrica en P3 ): El siguiente es un ejemplo de una superficie reglada. Considere la superficie Q (una superficie es una variedad de dimensión 2) en P3 definida por la
ecuación xy − zw = 0 (ver Figura 2.5).
A continuación probaremos que Q es igual a la inmersión de Segre de P1 × P1 en P3 para una
apropiada elección de coordenadas. Consideramos la inmersión de Segre ψ : P1 × P1 −→ P3 escrita
de la forma
([x0 : x1 ], [y0 : y1 ]) 7→ [x0 y0 : x0 y1 : x1 y0 : x1 y1 ] = [w : x : y : z],
y por lo tanto Im ψ ⊆ Z(xy − zw) = Q. Ya que dim ψ(P1 × P1 ) = 2, y por el inciso 4 del Ejemplo
1.17, se sigue que ψ(P1 × P1 ) = Q.
Probaremos a continuación que Q se ve realmente como la Figura 2.5, es decir, que contiene
dos familias de lı́neas {Li } y {Mi }, cada una parametrizada por t ∈ P1 con ciertas propiedades que
esperarı́amos del producto natural de dos “lı́neas”.
Ya que la inmersión de Segre ψ es un mapeo inyectivo, dado t = [a : b] ∈ P1 , el conjunto {t} × P1
es enviado a los puntos de la forma [ax0 : ax1 : bx0 : bx1 ] en Q. Estos puntos son exactamente
40
2.5. La Inmersión de Segre
2. Variedades Proyectivas
z
3
y
Lo
Mo
x
Figura 2.5: La superficie cuádrica en P3 .
las soluciones al sistema homogéneo de ecuaciones lineales dado por bx − az = 0, bw − ay = 0,
y representan ası́ una lı́nea que necesariamente yace en Q. Al variar el punto t sobre todo P1 ,
obtenemos una familia de lı́neas {Lt }.
De manera análoga, el conjunto P1 × {t} es enviado bajo ψ a los puntos de la forma [ax0 :
bx0 : ax1 : bx1 ], los cuales también definen una familia de lı́neas {Mt } definida por Mt := Z(bw −
ax, by − az), la cual nuevamente está parametrizada por t ∈ P1 .
A continuación veremos las propiedades que cumplen estas familias de lı́neas. Primero, sean
s = [a : b], t = [c : d] ∈ P1 , s 6= t, y supongamos P ∈ Ls ∩ Lt , entonces tenemos que ∃ [x0 :
x1 ], [y0 : y1 ] ∈ P1 : [ax0 : ax1 : bx0 : bx1 ] = P = [cy0 : cy1 : dy0 : dy1 ], lo que dice que
∃ λ ∈ k ∗ : axi = λcyi , bxi = λdyi , i ∈ {0, 1}. Analizaremos solo el caso en el que a 6= 0 y x1 6= 0 (los
demás son análogos), ası́ cy1 6= 0 y por lo tanto x1 = λc
a y1 . Por último, como bx1 = λdy1 , tenemos
que λbc
y
=
λdy
,
y
esto
implica
que
bc
−
ad
=
0,
lo
cual nos dice que s = t, pero esto es una
1
a 1
1
contradicción. Concluimos que ∀ s, t ∈ P tales que s 6= t, se tiene que Ls ∩ Lt = ∅. Siguiendo los
mismos argumentos obtenemos el mismo resultado para la familia de lı́neas {Mt }.
Es fácil ver que ∀ t = [a : b], s = [c : d] ∈ P1 : Lt ∩ Ms consta de al menos un punto (pues
ψ([a : b], [x0 : x1 ]) = ψ([y0 : y1 ], [c : d]) al menos cuando [x0 : x1 ] = [c : d] y [y0 : y1 ] = [a : b]).
Veamos que éste es el único punto de intersección para cada par de lı́neas Lt , Ms . Sea P = [w : x :
y : z] ∈ Lt ∩ Ms , entonces las coordenadas w, x, y, z de P cumplen las siguientes relaciones:
bx = az,
cx = dw,
dy = cz,
ay = bw.
Ya que t = [a : b] y s = [c : d] son puntos de la lı́nea proyectiva, entonces no todas las coordenadas
son nulas, quedándonos con solo 4 casos distintos a probar. Analizaremos solo los casos a 6= 0, c 6= 0
y b 6= 0, d 6= 0; los casos a 6= 0, d 6= 0 y b 6= 0, c 6= 0 se tratan de manera análoga. Comencemos con
P = [aw : ax : ay : az] = [aw : ax : bw : bx] = [acw : acx : bcw : bcx] = w[ac : ad : bc : bd] = ψ([a : b], [c : d])
P = [bw : bx : by : bz] = [ay : az : by : bz] = [ady : adz : bdy : bdz] = z[ac : ad : bc : bd] = ψ([a : b], [c : d]).
Resumiendo, tenemos en Q = ψ(P1 × P1 ) dos familias de lı́neas {Lt }, {Mt }, cada una parametrizada por t ∈ P1 , tales que
1. ∀ s, t ∈ P1 con s 6= t se tiene Ls ∩ Lt = Ms ∩ Mt = ∅
41
2.6. Intersecciones de Variedades Proyectivas
2. Variedades Proyectivas
2. ∀ s = [a : b], t = [c : d] ∈ P1 : Ls ∩ Mt = ψ([a : b], [c : d]).
Esto está de acuerdo con la idea intuitiva que tenemos del producto de dos lı́neas, tal y como lo
mencionamos al inicio de esta discusión. En el Capı́tulo 3 tendremos la oportunidad de analizar
más a fondo los productos de variedades, tanto afines como proyectivas.
2.9 Ejemplo: Mostrar que cualesquiera dos curvas en P2 se intersecan.
Sean C1 = Z(f ), C2 = Z(g) dos curvas en P2 , sabemos que ht I(C1 ) = 1 = ht I(C2 ) = y consideremos I(C1 ) + I(C2 ) = hf, gi, el cual es un ideal homogéneo (pues está generado por elementos
homogéneos de grado positivo) por lo que hf, gi ⊂ hx, y, zi. A continuación sea p un ideal primo
minimal de hf, gi tal que hf, gi ⊆ p ⊆ hx, y, zi. Se tiene por [ZS58] (ver Corolario al Teorema 9, Volumen I, Capı́tulo VII, Sección 2 página 154), los primos minimales asociados a un ideal homogéneo
son homogéneos, y por el resultado de la Teorı́a de la Dimensión citado en el Ejemplo 1.18, tenemos
que ht p ≤ 2, lo que implica que p ( hx, y, zi (pues ht hx, y, zi = 3).
Al juntar todos estos hechos, tenemos que Z(p) 6= ∅, y ya que hf i ⊆ p, hgi ⊆ p, tenemos que
∅=
6 Z(p) ⊆ C1 y Z(p) ⊆ C1 , por lo cual concluimos que C1 ∩ C2 6= ∅ y hemos terminado.
Observación 2.7: De estos dos ejemplos vemos que ψ(P1 × P1 ) y P2 son dos objetos geométricamente muy distintos, ya que el primero contiene curvas que no se intersecan, mientras que en el
segundo esto no sucede nunca.
2.6.– Intersecciones de Variedades Proyectivas
En esta sección estudiaremos algunos ejemplos concretos de intersección de variedades proyectivas, cuyo proceso algebraico asociado es el de encontrar soluciones comunes de varios sistemas de
ecuaciones polinomiales.
Para el siguiente ejemplo enunciamos primero un importante teorema de Álgebra Lineal.
α Teorema 2.13. Si W1 y W2 son subespacios de dimensión finita de un espacio vectorial V ,
entonces
dim (W1 ∩ W2 ) = dim W1 + dim W2 − dim (W1 + W2 ).
(2.6.1)
Demostración. Ver por ejemplo [HK73], página 46.
∗
2.10 Ejemplo (Variedades lineales en Pn ): Una hipersuperficie definida por un polinomio lineal se llama un hiperplano.
1. Sea Y una variedad en Pn , probar que I(Y ) puede ser generado por polinomios lineales si, y
solo si, Y puede ser escrita como una intersección de hiperplanos.
Supongamos que I(Y ) = hL1 , . . . , Ln i, siendo los L0i s polinomios lineales, entonces hLi i ⊂
I(Y ), lo cual implica que ∀ i ∈ {1, . . . , n} : Z(Li ) := Hi ⊃ Z(I(Y )), por lo tanto ∩ni=1 Hi ⊃ Y .
Recı́procamente,
dado P ∈ ∩ni=1 Hi , entonces
Pn
P ∀ i : P ∈ Z(Li ), sea f ∈ I(Y ), entonces
f = i=1 αi Li , con αi ∈ S, ası́, f (P ) = ni=1 αi (P )Li (P ) = 0, luego, P ∈ Z(I(Y )) = Y ,
ası́ ∩ni=1 Hi ⊂ Y y tenemos que Y = ∩ni=1 Hi
Sea T : An −→ An un automorfismo de espacios vectoriales y sea {e1 , . . . , en } la P
base canónica
n
de An , con ∀ i ∈ {1, . . . , n} : T (ei ) = (ai1 , . . . , ain ). Luego, dado α =
i=1 ci ei , tenemos que T (α) = (a11 c1 + · · · + a1n cn , . . . , an1 c1 + · · · + ann cn ), luego, si hacemos para
toda i ∈ {1, . . . , n}, fi (x1 . . . , xn ) = a11 x1 + · · · + a1n xn , tenemos que T induce un automorfismo de anillos ϕT : k[x1 , . . . , xn ] −→ k[x1 , . . . , xn ] dado por ϕT (F (x1 , . . . , xn )) =
42
2.6. Intersecciones de Variedades Proyectivas
2. Variedades Proyectivas
F (f1 (x1 , . . . , xn ), . . . , fn (x1 , . . . , xn )) (i.e., ∀ i ∈ {1, . . . , n} : xi 7→ fi ), cuyo morfismo inverso
ϕ−1
T está dado por ϕT −1 .
Si V ⊆ An es un subespacio vectorial y si W = T (V ), entonces tenemos que ϕT (I(W )) = I(V ),
ya que si F ∈ I(W ) y P ∈ V , entonces ϕT (F )(P ) = F (f1 (P ), . . . , fn (P )) = F (T (P )) = 0, por
lo que ϕT (I(W )) ⊆ I(V ). Haciendo el mismo proceso para el morfismo inverso ϕ−1
T tenemos
la otra inclusión. Por último, si V ⊆ An es cualquier subespacio vectorial de dimensión r,
entonces existe un isomorfismo T : An −→ An tal que T (Z(xr+1 , . . . , xn )) p
= V . Si denotamos
por W = Z(xr+1 , . . . , xn ), tenemos que I(W ) = I(Z(xr+1 , . . . , xn )) = hxr+1 , . . . , xn i =
hxr+1 , . . . , xn i pues hxr+1 , . . . , xn i es un ideal primo, ası́ I(V ) debe ser un ideal primo
A continuación, supongamos que Y se puede expresar como una intersección de hiperplanos
Y = ∩ni=1 Hi , donde Hi = Z(Li ) siendo Li un polinomio lineal para toda i, entonces al
considerar el cono afı́n C(Y ) ⊂ An+1 , el cual, al ser una intersección finita de hiperplanos en
el espacio vectorial k n+1 resulta ser un subespacio vectorial de dimensión r+1. Sea {α0 , . . . , αr }
una base para éste subespacio, la cual completamos a una base B = {α0 , . . . , αn } de k n+1 ,
y sea B ∗ := {φ0 , . . . , φn } la base dual de B. Con respecto a esta base, es claro que C(Y ) =
Z(φr+1 , . . . , φn ). Por la discusión anterior se sigue que I(Y ) puede ser generado por polinomios
lineales. En este caso se dice que Y es una variedad lineal.
De las observaciones anteriores se sigue que si Y es una variedad lineal de dimensión r en
Pn , entonces la menor cantidad de polinomios generadores lineales del ideal I(Y ) es n − r,
de lo contrario, si suponemos que C = {f0 , . . . , fk−1 } genera a I(Y ), donde k ≤ n − r,
entonces al completar C a una base C ∗ de (An+1 )∗ y considerar la base C de la cual es dual,
llegarı́amos a que dim C(Y ) = k > r + 1, de donde obtendrı́amos que dim Y > r, lo cual es
una contradicción.
2. Sean Y , Z variedades lineales en Pn , con dim Y = r, dim Z = s. Si r + s − n ≥ 0, entonces
Y ∩ Z 6= ∅. Más aún, si Y ∩ Z 6= ∅, entonces Y ∩ Z es una variedad lineal con dim (Y ∩ Z) ≥
r + s − n.
Visualicemos el problema en el k-espacio vectorial de dimensión finita An+1 , por el inciso
anterior, Y lo podemos ver como el Kernel K1 de un sistema de n − r ecuaciones lineales
linealmente independientes, al igual que Z es el Kernel K2 de un sistema de n − s ecuaciones
lineales (ambas en n + 1 variables), entonces dimk K1 = r + 1, dim k K2 = s + 1. Para que
Y ∩ Z sea una variedad proyectiva no vacı́a, necesitamos que dim k (Y ∩ Z) ≥ 1, pues de lo
contrario, serı́a el subespacio trivial {0} que sabemos corresponde al ideal S+ . Tenemos que
dim k (Y + Z) ≤ n + 1, y por el teorema anterior, se sigue que:
dim k (Y ∩Z) = (r +1)+(s+1)−dim k (Y +Z) ≥ (r +1)+(s+1)−(n+1) = (r +s−n)+1 ≥ 1,
por lo que Y ∩ Z es por lo menos un subespacio lineal de dimensión uno en An+1 , el cual
representa un punto P ∈ Pn , luego Y ∩ Z 6= ∅.
Sean Y = Z(L1 , . . . , Lα ) y Z = Z(M1 , . . . , Mβ ), donde los Li y los Mi son polinomios lineales
en n + 1 variables. Sea A la matriz (α + β) × (n + 1) obtenida de la unión de estos polinomios
lineales, y cuyo conjunto solución (i.e., los X ∈ An+1 tales que AX = 0) definen Y ∩ Z.
Supongamos que el rango de A es r. Si r = n + 1 entonces el sistema sólo tiene la solución
trivial {0}, por lo que Y ∩ Z = ∅. En caso contrario, siempre podemos despejar r variables en
términos de las n + 1 − r restantes, de donde se sigue que
k[x0 , . . . , xn ]/I(Y ∩ Z) ∼
= k[x0 , . . . , xn+1−r ]
43
2.6. Intersecciones de Variedades Proyectivas
2. Variedades Proyectivas
de donde obtenemos que
dim (Y ∩ Z) = dim S(Y ∩ Z) − 1 = dim k[x0 , . . . , xn+1−r ] − 1 = n + 1 − r.
Observación 2.8: En el subconjunto de las variedades proyectivas lineales se cumple la fórmula
de las dimensiones (2.6.1), si convenimos que dim ∅ = −1, y por lo tanto, la función dim actúa
realmente en este caso en particular como una “ medida” (en el sentido usual) del tamaño de las
variedades.
2.11 Ejemplo:
1. La intersección de dos variedades no necesariamente es una variedad. Sea Q1 y Q2 las superficies cuádricas en P3 definidas por las ecuaciones x2 − yw = 0 y xy − zw = 0, respectivamente.
Nuestro objetivo será mostrar que Q1 ∩ Q2 es la unión de una cúbica torcida y una lı́nea.
Analizaremos primero como son los puntos de la variedad Q1 . Tomemos P = [w : x : y : z] ∈
Q1 , con w = 0, entonces x2 = 0, lo que implica que x = 0. Por lo tanto obtenemos dos tipos
de puntos, [0 : 0 : 1 : t], con t ∈ k (correspondiente a y 6= 0) y [0 : 0 : 0 : 1] (que corresponde a
y = 0).
Supongamos a continuación que w 6= 0, en cuyo caso podemos suponer w = 1. Ası́ en este
plano se tiene la ecuación x2 − y = 0, donde no hay restricciones sobre z, por lo que los puntos
en este caso son de la forma [1, t, t2 , s], con t, s ∈ k. Concluimos que solo hay 3 tipos de puntos
en Q1 .
A continuación tomamos P ∈ Q1 ∩ Q2 , entonces P debe de ser de uno de los 3 tipos anteriores
y además satisfacer la ecuación que define a la variedad Q2 , a saber xy = zw. Sustituyendo
[0 : 0 : 1 : t] obtenemos 0 = 0, por lo que todo punto de esta forma se encuentra en la
intersección. Al sustituir [0 : 0 : 0 : 1] también obtenemos la identidad 0 = 0, por lo que este
punto también se encuentra en la intersección. Por último, al sustituir los puntos de la forma
[1 : t : t2 : s], tenemos que s = t3 , por lo que los únicos puntos en la intersección en este caso
son de la forma [1 : t : t2 : t3 ]. En resumen, tenemos que
Q1 ∩ Q2 = {[1 : t : t2 : t3 : t ∈ k]} ∪ {[0 : 0 : 0 : 1]} ∪ {[0 : 0 : 1 : t] : t ∈ k},
donde las primeras componentes conforman una curva cúbica torcida y la tercera componente
es una lı́nea. Por lo tanto hemos llegado a la descomposición deseada y vemos que Q1 ∩ Q2 no
es una variedad proyectiva.
2. Aún cuando la intersección de dos variedades sea una variedad, puede que el ideal de la
intersección no sea la suma de los ideales. Por ejemplo, sea C la cónica en P2 dada por la
ecuación x2 − yz = 0, y sea L la lı́nea dada por y = 0. Para ver que puntos están en L,
nuevamente tomamos dos casos, si x 6= 0, entonces todo punto de la forma {[1 : 0 : t] : t ∈ k}
está en L, y si x = 0, entonces z 6= 0, por lo que el punto [0 : 0 : 1] también está en L, y estos
son los únicos puntos en L. A continuación, si P ∈ C ∩ L, entonces C tiene coordenada y igual
a 0, al sustituir en la ecuación x2 − yz = 0 obtenemos x = 0, y necesariamente se tiene z 6= 0,
por lo tanto el único punto en C ∩ L es P = [0 : 0 : 1].
Consideremos ahora los ideales de estas variedades.
Como x2 −yz, y ∈ k[x, y, z] son polinomios
irreducibles, se tiene
que I(C)
= x2 − yz y I(L) = hyi. Vemos que x2 = (x2 − yz) + yz ∈
2
I(C) + I(L), luego x , y ⊆ I(C) + I(L), Recı́procamente, si f ∈ I(C) + I(L), entonces
2 − yz) + β(y) = x2 (α) + y(zα + β) ∈ x2 , y .
existen α, β ∈ k[x, y, z] tales que
f
=
α(x
Concluimos que I(C) + I(L) = x2 , y . Sin embargo, x ∈ I(P ), pero x ∈
/ x2 , y . Por lo tanto
I(C) + I(L) 6= I(P ).
44
2.6. Intersecciones de Variedades Proyectivas
2. Variedades Proyectivas
Observación 2.9: Volviendo al Ejemplo 2.8 sea Y ⊂ Q la curva cúbica torcida, ası́ P = [0 : 0 :
0 : 1] ∈ Y . Tenemos que las lı́neas L[0:1] y M[0:1] son las únicas dos lı́neas de Q pasan por P , sin
embargo, L[0:1] * Y y M[0:1] * Y (por ejemplo, [0 : 0 : 1 : 0] ∈ L[0:1] y [0 : 1 : 0 : 0] ∈ M[0:1] , y
ambos puntos no se hallan en Y ). Concluimos que, además de las dos familias de lı́neas descritas, Q
contiene otras curvas que no son necesariamente una unión de estas familias de lı́neas. Por lo tanto
la topologı́a de Zariski en Q no es homeomorfa vı́a la inmersión de Segre ψ a la topologı́a producto
en P1 × P1 (donde cada P1 tiene su respectiva topologı́a de Zariski).
2.12 Ejemplo (Intersecciones completas): Una variedad Y de dimensión r en Pn es una intersección completa si I(Y ) puede ser generado por n − r elementos. Y es una intersección completa
conjuntista si Y se puede escribir como la intersección de n − r hipersuperficies.
Sea Y una variedad en Pn con Y = Z(a), y suponga que a puede ser generado por q elementos.
Mostraremos que dim Y ≥ n − q.
Como Y es una variedad proyectiva, entonces es un conjunto algebraico irreducible, ası́, el cono
afı́n C(Y ) = Z(a) ⊆ An+1 es irreducible. Por el Ejemplo 1.18, se tiene que dim C(Y ) ≥ n+1−q
y como dim C(Y ) = dim Y + 1, obtenemos que dim Y = dim C(Y ) − 1 ≥ n − q.
Toda intersección completa es una intersección completa conjuntista.
Sea Y una intersección completa, entonces I(Y ) = hα1 , . . . , αn−r i, donde ∀ i ∈ {1, . . . , n − r},
αi es un polinomio homogéneo que podemos suponer irreducible (si alguno no es irreducible,
entonces lo reemplazamos por uno de sus factores irreducibles. Dicho reemplazo no altera el
ideal generado). Ası́ tenemos que
! n−r
n−r
[
\
Y = Z(I(Y )) = Z
{αi } =
Z(αi ),
i=1
i=1
donde por el Ejemplo 2.6, Z(αi ) := Hi es una hipersuperficie, y de esta manera se sigue el
resultado.
Estos ejemplos han servido como motivación y una primera introducción para el tratamiento que
se dará a la Teorı́a de Intersección en Espacios Proyectivos en el Capı́tulo 5.
45
2.6. Intersecciones de Variedades Proyectivas
2. Variedades Proyectivas
46
Capı́tulo 3
Morfismos
Hasta este momento nos hemos concentrado solo en describir y estudiar nuestros objetos de
manera aislada y desde el punto de vista de la Teorı́a de Categorı́as; tanto ó más importantes
que los objetos en si, son los morfismos o funciones que nos permiten viajar de un objeto a
otro y relacionarlos entre sı́. En la Sección 3.1 (el corazón de este capı́tulo) incorporaremos
este lenguaje para definir la categorı́a de las variedades algebraicas. Cabe mencionar que
el concepto más general de variedad que manejaremos será el de variedad cuasi-proyectiva.
También definiremos una serie de objetos algebraicos asociados a una variedad y a los puntos
que la componen y después veremos que en realidad estos objetos son invariantes de la
misma (bajo la relación de isomorfismo que definiremos) y más tarde, cuando la variedad
resulte ser afı́n o proyectiva, seremos capaces de caracterizarlos completamente en términos
de su anillo coordenado afı́n u homogéneo, según sea el caso.
Aunque toda la Sección 3.1 es sumamente importante, hay un resultado que por su utilidad
destaca sobre los demás: la Proposición 3.7, la cual establece una correspondencia biyectiva
entre los conjuntos de morfismos de dos objetos geométricos (dos variedades) y el conjunto
de morfismos de dos objetos algebraicos (dos k-álgebras asociadas a dichas variedades). Y
¿qué mejor después de una sección difı́cil que una ilustración de los conceptos por medio de
ejemplos?, por ello la Sección 3.2 está completamente dedicada a la resolución de ejemplos
y establecemos contraejemplos que hacen más claros los conceptos de la sección anterior.
La Sección 3.3 versa sobre los morfismos entre espacios proyectivos, aquı́ damos un par
de caracterizaciones de los mismos que permiten ofrecer más ejemplos interesantes. En
la Sección 3.4 vemos que el producto cartesiano de variedades afines define un producto
en la categorı́a de las variedades; caracterizaremos el anillo coordenado del producto y su
dimensión, una vez hecho esto, analizaremos los productos de variedades cuasi-proyectivas.
Por último, la Sección 3.5 desarrolla una introducción a las variedades normales y, en caso de
que tengamos una variedad afı́n Y , mostramos que siempre podemos encontrar una pareja
∼
∼
∼
(Y , π), donde Y es una variedad normal y π es un morfismo π : Y −→ Y ; dicha pareja tiene
una propiedad universal que la caracteriza.
3.1.– La Categorı́a de las Variedades Algebraicas
Hasta el momento se han definido las variedades afines y proyectivas, pero no se ha discutido
nada sobre los mapeos que están permitidos entre ellas, ni siquiera se ha mencionado cuando dos de
ellas son isomorfas. En esta sección discutimos las funciones regulares sobre una variedad y después
definimos los morfismos de variedades. Necesitamos dar una definición local, de modo que podamos
definir al mismo tiempo el anillo de funciones en todo subconjunto abierto de una variedad. Después
de esto tendremos una buena categorı́a en la cual trabajar.
47
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
Definición: Sea Y una variedad cuasi-afı́n en An . Una función f : Y −→ k es regular en el punto
P ∈ Y si existe una vecindad abierta U ⊆ Y de P y polinomios g, h ∈ A = k[x1 , . . . , xn ], tal que h
no se anula en U y f = g/h en U . (Por supuesto, aquı́ consideramos a los polinomios como funciones
en An y, por lo tanto, en Y .) Decimos que f es regular en Y si es regular en todo punto de Y .
Para probar el siguiente lema es necesario demostrar antes un hecho topológico básico que
expresa que la propiedad de ser un subconjunto cerrado es local.
Proposición 3.1. Sea Y un espacio topológico y sea {Ui } una cubierta abierta de Y , entonces
un subconjunto Z ⊂ Y es cerrado si, y solo si, Z ∩ Ui es cerrado en Ui para todo Ui .
Demostración. Si Z es un conjunto cerrado, entonces por la definición de topologı́a inducida, dado
cualquier conjunto abierto U , Z ∩ U es cerrado en U . Recı́procamente, supongamos Y = ∪i∈I Ui ,
con Ui abierto ∀ i ∈ I, entonces Ui − (Ui ∩ Z) es abierto en Ui y por lo tanto abierto en Y , esto
implica que el conjunto
[
Y − Z = (Ui − (Ui ∩ Z))
i∈I
es abierto en Y , lo cual indica que Z es cerrado, lo cual finaliza la demostración.
∗
Lema 3.2. Una función regular es continua, cuando identificamos a k con A1k con su topologı́a
de Zariski.
Demostración. Basta probar que f −1 envı́a conjuntos cerrados en conjuntos cerrados. Por el
Ejemplo 1.1, todo conjunto cerrado en A1k es un conjunto finito de puntos, luego es suficiente
mostrar que ∀ a ∈ k : f −1 (a) = {P ∈ Y | f (P ) = a} es cerrado. Esto se puede verificar de manera
local, sea U un conjunto abierto en el cual f = g/h, con g, h ∈ A y h no se anula en U . Entonces
f −1 (a) ∩ U = {P ∈ U | g(P )/h(P ) = a}. Pero g(P )/h(P ) = a si y solo si (g − ah)(P ) = 0. Por lo
tanto f −1 (a) ∩ U = Z(g − ah) ∩ U el cual es cerrado. Por la proposición anterior, f −1 (a) es cerrado
en Y .
∗
Definición: Sea Y una variedad cuasi-proyectiva en Pn . Una función f : Y −→ k es regular en
el punto P ∈ Y si existe una vecindad abierta U ⊆ Y de P y polinomios homogéneos g, h ∈ S =
k[x0 , . . . , xn ] del mismo grado, tal que h no se anula en U y f = g/h en U . Decimos que f es regular
en Y si es regular en todo punto de Y .
Observación 3.1: Como en el caso afı́n, una función regular es necesariamente continua (la demostración es similar). Una consecuencia importante de este hecho es la siguiente: si f y g son funciones
regulares en una variedad X tales que f = g en algún abierto no vacı́o U ⊆ X, entonces tenemos
que f = g en todo X.
A continuación definiremos las partes de las que constará nuestra categorı́a de las variedades
(véase el Apéndice A como referencia sobre este tema).
Definición: Sea k un campo algebraicamente cerrado fijo. Una variedad sobre k (o simplemente
variedad) es una variedad afı́n, cuasi-afı́n, proyectiva o cuasi-proyectiva como se han definido previamente. Si X, Y son dos variedades, un morfismo ϕ : X −→ Y es un mapeo continuo tal que para
todo abierto V ⊆ Y y para toda función regular f : V −→ k, la función ϕ∗ = f ◦ ϕ : ϕ−1 (V ) −→ k
es regular.
48
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
Claramente la composición de dos morfismos es un morfismo, hemos definido entonces una
categorı́a. En particular tenemos la noción de isomorfismo: un isomorfismo ϕ : X −→ Y de dos
variedades es un morfismo que admite un morfismo inverso ψ : Y −→ X con ψ ◦ ϕ = idX y
ϕ ◦ ψ = idY . Notemos que un isomorfismo necesariamente es biyectivo y bicontinuo, pero que
un morfismo biyectivo y bicontinuo no es necesariamente un isomorfismo, como lo veremos en los
ejemplos de la Sección 3.2.
Observación 3.2: Toda variedad es una variedad cuasi-proyectiva. En efecto, esto es obvio si la
variedad es proyectiva, también es inmediato si la variedad es afı́n, pues sabemos que si Y ⊆ An
es afı́n e identificamos a An con U0 ⊂ Pn , entonces al tomar su cerradura proyectiva Y ⊆ Pn se
tiene que Y = U0 ∩ Y . Tomemos pues un conjunto abierto X de la variedad afı́n Y ⊆ An , entonces
X = V ∩ Y , donde V es un conjunto abierto en An , pero esto dice que V es abierto en U0 y por
ende en Pn y ası́ X = V ∩ Y = V ∩ (U0 ∩ Y ) = V ∩ Y y también es cuasi-proyectiva. Por lo
tanto, el concepto más general de variedad que manejaremos en este trabajo será el de variedad
cuasi-proyectiva.
A continuación introducimos algunos anillos de funciones asociados con una variedad, los cuales
demostrarán su utilidad más adelante en ciertos casos particulares de variedades, cuando los relacionemos con los anillos coordenados afines y homogéneos.
Definición: Sea Y una variedad. Denotamos por O(Y ) el anillo de todas las funciones regulares
en Y . Si P ∈ Y , definimos el anillo local de P en Y , OP,Y (o simplemente OP ) como el anillo de
gérmenes de funciones regulares en Y cerca de P . En otras palabras, un elemento de OP es una
clase de equivalencia de la pareja hU, f i, donde U es un abierto de Y que contiene a P , y f es una
función regular en U , donde identificamos dos de tales parejas hU, f i, hV, gi si f = g en U ∩ V .
Notemos que OP es de hecho un anillo local: su ideal maximal m es el conjunto de gérmenes
de funciones regulares que se anulan en P , ya que si f (P ) 6= 0, entonces 1/f es regular en alguna
vecindad de P . El campo residual OP /m es isomorfo a k (via el homomorfismo ψ : OP −→ k dado
por hU, f i 7→ f (P ), el cual es suprayectivo con Ker ψ = m).
Definición: Si Y es una variedad, el campo de funciones de Y , K(Y ) lo definimos como sigue:
un elemento de K(Y ) es una clase de equivalencia de parejas hU, f i, donde U es un subconjunto
abierto no vacı́o de Y , f es una función regular en U y en donde identificamos dos parejas hU, f i,
hV, gi si, y solo si, f = g en U ∩ V . Los elementos de K(Y ) se llaman funciones racionales en Y .
Veamos que K(Y ) es de hecho un campo. Ya que Y es irreducible, cualesquiera dos conjuntos
abiertos no vacı́os se intersecan, por lo tanto podemos definir una adición y una multiplicación en
K(Y ) dotándolo de una estructura de anillo. Luego, si hU, f i ∈ K(Y ) con f 6= 0, podemos restringir
f al conjunto abierto V = U − (U ∩ Z(f )) donde no se anula nunca, ası́ que 1/f es regular en V ,
por lo tanto hV, 1/f i es un inverso para hU, f i. Vemos además que si restringimos la relación de
equivalencia a aquellas parejas hU, f i que contengan a un punto P fijo, entonces obtenemos el anillo
local en el punto P , OP .
Ahora hemos definido para una variedad Y , el anillo de funciones globales O(Y ), el anillo local
OP en un punto de Y , y el campo de funciones K(Y ). Por restricción de funciones obtenemos mapeos
naturales O(Y ) → OP → K(Y ), los cuales de hecho son inyectivos por la Observación 3.1. Por lo
tanto frecuentemente se identificaran a O(Y ) y OP como subanillos de K(Y ). Si reemplazamos Y
por una variedad isomorfa, entonces los anillos correspondientes son isomorfos. Para ver esto, si
ϕ : X −→ Y es un morfismo de variedades, entonces ϕ∗ : O(Y ) −→ O(X) es un homomorfismo de
k-álgebras y, más aún, si ϕ(Q) = P , entonces ϕ∗ : OP,Y −→ OQ,X es también un homomorfismo de
49
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
anillos. Este homomorfismo de anillos locales satisface una propiedad adicional: ϕ∗ (mP,Y ) ⊆ mQ,X .
Dicho homomorfismo de anillos locales es llamado un homomorfismo local.
Por último, ϕ∗ : K(Y ) −→ K(X) es un homomorfismo de campos. Como consecuencia éste es
inyectivo o cero, pero como es un k-homomorfismo, nunca es el mapeo cero y por lo tanto siempre
es una inyección. Por lo tanto podemos decir que O(Y ), OP y K(Y ) son invariantes de la variedad
Y (y del punto P ) salvo isomorfismo.
3.1 Ejemplo (Mapeos inducidos y propiedades locales de los morfismos):
a) Sea ϕ : X −→ Y un morfismo. Entonces para cada P ∈ X, ϕ induce un homomorfismo de anillos
locales ϕ∗P : Oϕ(P ),Y −→ OP,X .
Tomemos hU, f i ∈ Oϕ(P ),Y , tenemos el siguiente diagrama conmutativo:
ϕ
/U ⊆Y
NNN
NNN
NN
f
f ◦ϕ NNNN
N' ϕ−1 (U ) ⊆ X
k
en dónde ϕ−1 (U ) es una vecindad de P y, por definición de
morfismo, ϕ−1
(U
),
f
◦
ϕ
es una
función regular cerca de P , ası́, definimos ϕ∗P (hU, f i) := ϕ−1 (U ), f ◦ ϕ . Veamos que este
mapeo está bien definido, tomemos hV, gi tal que g = f en U ∩ V , entonces ϕ ◦ f = ϕ ◦ g
en ϕ−1 (U ∩ V ) = ϕ−1 (U ) ∩ ϕ−1 (V ), i.e., ϕ∗P (hU, f i) = ϕ∗P (hV, gi), que es lo que se querı́a
demostrar. A continuación veamos que es un homomorfismo de anillos bajo las operaciones
puntuales usuales, i.e.:
hU, f i + hV, gi = hU ∩ V, f + gi
y
hU, f i · hV, gi = hU ∩ V, f gi ,
para ello, tenemos que si f, g, h son polinomios, entonces se cumple que (f + g) ◦ h = f ◦ h + g ◦ h
y (f g) ◦ h = (f ◦ h)(g ◦ h); al ser las funciones regulares localmente cocientes de polinomios, se
cumplen las mismas relaciones; por lo tanto,
ϕ∗P (hU, f i + hV, gi) = ϕ−1 (U ∩ V ), (f + g) ◦ ϕ = ϕ−1 (U ) ∩ ϕ−1 (V ), f ◦ ϕ + g ◦ ϕ
= ϕ−1 (U ), f ◦ ϕ + ϕ−1 (V ), g ◦ ϕ = ϕ∗P (hU, f i) + ϕ∗P (hV, gi).
De manera similar se sigue de las observaciones que ϕ∗P (hU, f i · hV, gi) = ϕ∗P (hU, f i) · ϕ∗P (hV, gi).
Ası́, tiene el resultado.
b) Probar que un morfismo ϕ es un isomorfismo si y solo si ϕ es un homeomorfismo, y el mapeo
inducido ϕ∗P en los anillos locales es un isomorfismo para todo P ∈ X. (Esto un ejemplo de una
“propiedad local ” de las variedades algebraicas).
Si ϕ es un isomorfismo, claramente ϕ es un homeomorfismo (pues es biyectivo y bicontinuo);
si U es una vecindad de ϕ(P ) en Y , entonces ϕ−1 (U ) = V es una vecindad de P en X y,
recı́procamente, si V es una vecindad de P en X, entonces ϕ(V ) es una vecindad ϕ(P
lo
) en Y , por
−1
∗
∗
cual es fácil ver que ϕϕ−1 (P ) : OP,X −→ Oϕ(P ),Y definido por ϕϕ−1 (P ) (hU, f i) = ϕ(U ), f ◦ ϕ
es el homomorfismo inverso de ϕ∗P , luego, éste es un isomorfismo para todo punto P ∈ X.
Recı́procamente, supongamos que ϕ es un homeomorfismo
tal que ∀ P ∈ X : OP,X ∼
= Oϕ(P ),Y
∗
∗
−1
vı́a el isomorfismo inducido ϕP dado por ϕP (hU, f i) = ϕ (U ), f ◦ ϕ . Automáticamente ϕ es
continua, ası́ que sea U ⊂ Y un conjunto abierto no vacı́o, entonces ∃ ! P ∈ X : ϕ(P ) ∈ Y ,
por el isomorfismo indicado, tenemos que ∀ f ∈ O(U ) : f ◦ ϕ ∈ O(ϕ−1 (U )), pero esto dice
que ϕ : X −→ Y es un morfismo. De manera análoga se demuestra que ϕ−1 : Y −→ X es un
morfismo que, de hecho, es la inversa de ϕ. Por lo tanto, ϕ es un isomorfismo.
50
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
c) Probar que si ϕ(X) es denso en Y , entonces el mapeo ϕ∗P es inyectivo para todo P ∈ X.
Supongamos ϕ∗P (hU, f i) = ϕ∗P (hV, gi), entonces ϕ−1 (U ), f ◦ ϕ = ϕ−1 (V ), g ◦ ϕ esto quiere
decir que f ◦ ϕ = g ◦ ϕ en ϕ−1 (U ) ∩ ϕ−1 (V ) = ϕ−1 (U ∩ V ), el cual es abierto en X, luego
f ◦ ϕ = g ◦ ϕ en todo X, esto implica que f = g en ϕ(X) ⊆ Y , pero dos funciones continuas que
son iguales en un conjunto denso son iguales en todo el conjunto, ası́ f = g en Y , en particular,
f = g en U ∩ V , luego, hU, f i = hV, gi y ϕ∗P es inyectiva.
Nuestra siguiente tarea es relacionar O(Y ), OP y K(Y ) con el anillo coordenado afı́n A(Y ) de
una variedad afı́n, y con el anillo coordenado homogéneo S(Y ) de una variedad proyectiva, los cuales
fueron introducidos con anterioridad. Antes de poder hacerlo, necesitamos un resultado preliminar.
Proposición 3.3. Sea A un dominio entero. Entonces
\
A=
Am .
m maximal
Demostración. Sea ∩m Am =: Ω, entonces la única inclusión que no es inmediata es A ⊇ Ω, pues
como A es un dominio entero y para todo ideal maximal m de A se tiene que 1 ∈
/ m, se tiene una
inmersión canónica A ,→ Am dada por x 7→ x1 . Sea entonces x ∈ Ω, ası́, para todo ideal maximal m
de A existen am ∈ A, bm ∈
/ m tales que x = am /bm . Sea b el ideal generado por todos los elementos
bm . Queremos demostrar que b = A. Supongamos que éste no es el caso, i.e., b ( A, en cuyo caso,
existe un ideal maximal o tal que b ⊆ o. Ası́, por una parte tenemos que bo ∈ b, pero, por otra
parte, bo ∈
/ o, por lo que bo ∈
/ b, lo cual es una contradicción.
P Por lo tanto b = A y, como 1 ∈ A,
tenemos que ∃ bm1 , . . . , bmn ∈ b, c1 , . . . , cn ∈ A tales que 1 = ni=1 ci bmi .
Ya que ∀ i ∈ {1, . . . , n} : bmi x = ami , al multiplicar esto por ci y sumar sobre i, obtenemos
x=
n
X
ci ami ∈ A,
i=1
∗
lo cual concluye la demostración.
Teorema 3.4. Sea Y ⊆ An una variedad afı́n con anillo coordenado afı́n A(Y ). Entonces:
a) O(Y ) ∼
= A(Y );
b) ∀ P ∈ Y , sea mP ⊆ A(Y ) el ideal de funciones que se anulan en P . Entones P 7→ mP da una
correspondencia 1-1 entre los puntos de Y y los ideales maximales de A(Y );
c) ∀ P ∈ Y : OP ∼
= A(Y )mP , y dim OP = dim Y ;
d ) K(Y ) ∼
= coc A(Y ), y ası́ K(Y ) es una extensión de campos finitamente generada de k, con
tr.d. K(Y )/k = dim Y .
Demostración. Se procederá en varios pasos. Primero definimos un mapeo α : A(Y ) −→ O(Y )de
la siguiente manera: tenemos que todo polinomio f ∈ A define una función regular en An y por
ende en Y . Entonces tenemos un homomorfismo A → O(Y ) cuyo Kernel es precisamente I(Y ), por
lo tanto obtenemos un homomorfismo inyectivo α : A(Y ) ,→ O(Y ).
Por el Ejemplo 1.7, sabemos que existe una correspondencia 1-1 entre los puntos de Y (los
cuales son los subconjuntos algebraicos minimales de Y ) y los ideales maximales de A que contienen
a I(Y ). Pasando al cociente por I(Y ), estos corresponden a los ideales maximales de A(Y ). Más
51
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
aún, utilizando α para identificar a los elementos de A(Y ) con funciones regulares en Y , el ideal
maximal que corresponde a P es justamente mP = {f ∈ A(Y ) | f (P ) = 0}. Esto prueba b).
Para todo P existe un mapeo natural A(Y )mP → OP , el cual es inyectivo porque α lo es, y
suprayectivo por la definición de función regular. Esto prueba que OP ∼
= A(Y )mP . Ahora dim OP =
ht mP . Como A(Y )/mP ∼
= k, concluimos de (1.12) y (1.13) que dim OP = dim Y.
∼ coc (A(Y )), y coc (A(Y )) = K(Y ), por que cada función
De c) se sigue que ∀P ∈ Y : coc (OP ) =
racional se encuentra de hecho en algún OP . Ahora A(Y ) es una k-álgebra finitamente generada,
ası́ que K(Y ) es una extensión finitamente generada de k. Más aún, tr.d. K(Y )/k = dim Y por
(1.12) y (1.13). Esto prueba d).
Para demostrar a) notemos que O(Y ) = ∩P ∈Y O(P ), donde todos los anillos se consideran como
subanillos de K(Y ). Utilizando b) y c) tenemos
\
A(Y ) ⊆ O(Y ) ⊆
A(Y )m .
m maximal
∗
La igualdad se sigue ahora de la Proposición 3.3.
Como una primera aplicación del Teorema anterior, tenemos el siguiente ejemplo.
3.2 Ejemplo (Subvariedades): Un subconjunto de un espacio topológico es localmente cerrado si es un subconjunto abierto de su cerradura, o, equivalentemente, si es la intersección de un
conjunto abierto con un conjunto cerrado. Si X es una variedad cuasi-afı́n o cuasi-proyectiva y Y
es un subconjunto irreducible localmente cerrado, entonces Y es también una variedad cuasi-afı́n
(respectivamente cuasi-proyectiva), en virtud de ser un subconjunto localmente cerrado del mismo
espacio afı́n o proyectivo. A esto le llamamos la estructura inducida en Y , y decimos que Y es una
subvariedad de X.
1. Ahora sea f : X −→ Y un morfismo, y sean X 0 ⊆ X y Y 0 ⊆ Y dos subconjuntos localmente
cerrados irreducibles de manera que ϕ(X 0 ) ⊆ Y 0 . Mostrar que f |X 0 : X 0 −→ Y 0 es un morfismo.
Para comenzar veamos que la inmersión canónica iX 0 : X 0 −→ X es un morfismo. Sea U ⊂ X
0
0
cualquier conjunto abierto, entonces i−1
X 0 (U ) := {x ∈ X | x ∈ U } = U ∩ X , el cual es
un conjunto abierto en X 0 , por lo que iX 0 es continua. Ahora sea f ∈ O(U ), tenemos que
0
0
f ◦ iX 0 : i−1
X 0 (U ) −→ k no es más que f : U ∩ X −→ k, y como O(U ) ⊆ O(U ∩ X ), se sigue
−1
que f es regular en iX 0 (U ), por lo que iX 0 es un morfismo. Como la composición de morfismos
es un morfismo, tenemos el siguiente diagrama
f ◦iX 0
/Y
O
BB
BB
iY 0
B
f |X 0 BB ? 0
X0 B
Y
Sea U ⊆ Y 0 abierto, entonces iY 0 (U ) = V ∩ Y 0 , donde V es abierto en Y . Tenemos que
(f ◦ iX 0 )−1 (iY 0 (U )) = f −1 (V ) ∩ X 0 , el cual es abierto en X 0 , y también vemos que f |−1
X 0 (U ) =
f −1 (V )∩X 0 , por lo que f |X 0 es continua. Ahora sea g ∈ O(U ), donde U = V ∩Y 0 es abierto en
Y 0 , tenemos que g◦f ◦iX 0 : f −1 (V )∩X 0 −→ k es una función regular, y de esta manera se sigue
que g ◦ f |X 0 = g ◦ f ◦ iX 0 . Con esto hemos terminado de ver que efectivamente f |X 0 : X 0 −→ Y 0
es un morfismo.
52
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
2. Sea X una variedad afı́n, P ∈ X. Muestre que existe una correspondencia unı́voca entre los
ideales primos del anillo local OP y las subvariedades cerradas de X que contienen a P .
Sea X una variedad afı́n, si Y ⊂ X es una subvariedad cerrada, entonces Y es un conjunto
algebraico irreducible en An , i.e., I(Y ) es un ideal primo en A tal que I(Y ) ⊃ I(X), y por el
teorema de la correspondencia para anillos, si π : A −→ A(X) es la proyección canónica, el
ideal p = π(I(Y )) es un ideal primo en A(X) unı́vocamente determinado por I(Y ). Además
A/I(X)
A(Y ) ∼
= I(Y )/I(X) ∼
= A(X)/p. Por lo tanto, dada cualquier función f ∈ p se tiene que f ∈ I(Y )
y f es nula sobre Y , y ya que P ∈ Y , entonces f (P ) = 0, luego f ∈ mP y p ⊆ mP .
Como OP ∼
= A(X)mP = (A(X) − mP )−1 A(X), luego p ∩ (A(X) − mP ) = ∅. También sabemos
que existe una correspondencia biunı́voca entre los ideales primos de A(X)mP con los ideales
primos de A(X) que no intersecan a A(X) − mP , hemos visto pues que toda subvariedad
cerrada Y de X que contiene al punto P se corresponde con un ideal primo p en A(X) que
está contenido en mP , ası́ al localizar A(X) en mP , p se corresponde nuevamente con otro
ideal primo p en A(X)mP , el cual es isomorfo a OP .
Proposición 3.5. Sea Ui ⊂ Pn el abierto definido por la ecuación xi 6= 0. Entonces el mapeo
ϕi : Ui −→ An de (2.8) es un isomorfismo de variedades.
Demostración. Como en la demostración de (2.8), asumiremos que i = 0 y escribiremos U = U0
y ϕ = ϕ0 . Sea f una función regular en An , entonces, localmente tenemos f = g/h, con g, h ∈
k[x1 , . . . , xn ], supongamos que deg g = d, deg h = e, entonces tenemos que β(g) es un polinomio
homogéneo de grado d y β(h) un polinomio homogéneo de grado e, ası́ tenemos que xe0 β(g)/xd0 β(h) =
G/H, donde G y H son polinomios homogéneos del mismo grado (d + e) en S. Ası́, ϕ∗ (g/h) = G/H
localmente y por lo tanto ϕ∗ es un mapeo de O(An ) a O(U ).
Sea ψ : An −→ U dada por (a1 , . . . , an ) 7→ [1 : a1 , . . . , an ], la cual es la inversa de ϕ; ya que
ϕ es un homeomorfismo, tenemos que ψ es continua. De hecho, es suficiente mostrar que ψ induce
un mapeo de O(U ) a O(An ). Sea f una función regular en U y y ∈ U , entonces existe un conjunto
abierto V con y ∈ V tal que f |V = F/G, con F, G ∈ S polinomios homogéneos del mismo grado.
Sea P ∈ V , entonces P = [1 : a1 . . . : an ] y entonces
F
F (1, a1 , . . . , an )
α(F ) −1
(P ) =
=
(ψ (P )),
G
G(1, a1 , . . . , an )
α(G)
∗
que es lo que se querı́a demostrar.
Antes de establecer el siguiente resultado, introducimos algunas notaciones. Si S es un anillo
graduado y p un ideal homogéneo primo en S, entonces denotamos por S(p) el subanillo de elementos
de grado 0 en la localización de S con respecto al subconjunto multiplicativo T que consiste de los
elementos homogéneos de S que no están en p. Notemos que T −1 S tiene una graduación natural
dada por deg (f /g) = deg f − deg g para f homogéneo en S y g ∈ T . S(p) es un anillo local con
ideal maximal (p · T −1 S) ∩ S(p) . En particular, si S es un dominio entero, entonces para p = (0)
obtenemos un campo S((0)) . De manera similar, si f ∈ S es un elemento homogéneo, denotamos por
S(f ) el subanillo de elementos de grado 0 en el anillo localizado Sf .
Teorema 3.6. Sea Y ⊆ Pn una variedad proyectiva con anillo coordenado homogéneo S(Y ).
Entonces:
a) O(Y ) = k;
53
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
b) ∀P ∈ Y , sea mP ⊂ S(Y ) el ideal generado por el conjunto de polinomios homogéneos f ∈ S(Y )
tal que f (P ) = 0. Entonces OP = S(Y )(mP ) ;
c) K(Y ) ∼
= S(Y )((0)) .
Demostración. Para comenzar, sea Ui ⊂ Pn el conjunto abierto xi 6= 0, y sea Yi = Y ∩ Ui .
entonces Ui es isomorfo a An por el isomorfismo ϕi de (3.5), ası́ que podemos considerar a Yi como
una variedad afı́n. Existe un isomorfismo natural ϕ∗i del anillo coordenado afı́n A(Yi ) con la localización S(Y )xi del anillo coordenado homogéneo de Y S(Y ). Primero efectuamos un isomorfismo
de k[y1 , . . . , yn ] con k[x0 , . . . , xn ](xi ) enviando f (y1 , . . . , yn ) a f (xo /xi , . . . , xn /xi ), omitiendo xi /xi
como en la prueba de (2.8). este isomorfismo envı́a I(Yi ) a I(Y )S(xi ) , ası́ que al pasar al cociente,
∼
obtenemos el isomorfismo deseado ϕ∗i : A(Yi ) −→ S(Y )(xi ) .
A continuación para probar b), sea P ∈ Y y elegimos i de manera que P ∈ Yi , entonces por (3.4),
OP ∼
= A(Yi )m0P , donde m0P es el ideal maximal de A(Yi ) que corresponde a P . Se verifica fácilmente
que ϕ∗i (m0P ) = mP · S(Y )(xi ) . Ahora xi ∈
/ mP , y la localización es transitiva, ası́ encontramos que
A(Yi )m0P ∼
= S(Y )mP , lo cual completa la prueba b).
Para demostrar c), utilizamos nuevamente (3.4) para ver que K(Y ), el cual es igual a K(Yi ), es
el campo de cocientes de A(Yi ). Pero por ϕ∗i , éste es isomorfo a S(Y )((0)) .
Por último, para probar a), sea f ∈ O(Y ) una función regular global. Entonces se tiene que ∀
i ∈ {0, 1, . . . , n}, f es regular en Yi , por (3.4) obtenemos que f ∈ A(Yi ), pero acabamos de ver que
N
A(Yi ) ∼
= S(Y )(xi ) , por lo tanto concluimos que f se puede escribir como gi /xi i , donde gi ∈ S(Y ) es
homogéneo de grado Ni . Pensando en O(Y ), K(Y ) y S(Y ) como subanillos del campo de cocientes
i
L de S(Y ), esto significa que ∀ i : xN
i f ∈ S(Y )Ni .
P
Ahora elegimos N ≥ Ni , entonces S(Y )N como k-espacio vectorial es generado por monomios
de grado N en x0 , . . . , xn , y en cada uno de estos monomios, aparece al menos un xi elevado a una
potencia mayor o igual que Ni . Por lo tanto tenemos S(Y )N · f ⊆ S(Y )N . Iterando se tiene que
q
∀q > 0 : S(Y )N · f q ⊆ S(Y )N . En particular, ∀q > 0 : xN
0 f ∈ S(Y ). Esto muestra que el subanillo
−N
S(Y )[f ] de L está contenido en x0 S(Y ), el cuál es un S(Y )-módulo finitamente generado. Como
S(Y ) es un anillo noetheriano, S(Y )[f ] es un S(Y )-módulo finitamente generado y, por lo tanto, f
es entero sobre S(Y ). Esto significa que ∃ a1 , . . . , am ∈ S(Y ) tales que
f m + a1 f m−1 + · · · + am = 0.
Como f tiene grado cero, podemos reemplazar los ai por sus componentes homogéneas de grado
0 y seguir teniendo una ecuación válida. Pero S(Y )0 = k, por lo tanto ai ∈ k para todo i, y f es
algebraico sobre k. Pero k es algebraicamente cerrado, por lo tanto f ∈ k.
∗
El siguiente resultado demuestra que su X y Y son variedades afines, entonces X es isomorfa
a Y si y solo si A(X) es isomorfa a A(Y ) como k-álgebra. De hecho, la prueba da más, ası́ que
establecemos un resultado más fuerte.
Proposición 3.7. Sea X una variedad y Y una variedad afı́n. Entonces existe un mapeo biyectivo natural de conjuntos
∼
α : Hom (X, Y ) −→ Hom (A(Y ), O(X)).
donde el conjunto de la izquierda representa morfismos de variedades, y el conjunto de la derecha
significa morfismos de k-álgebras.
54
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
Demostración. Dado un morfismo ϕ : X −→ Y , ϕ envı́a funciones regulares en Y a funciones
regulares en X, por lo tanto ϕ induce un mapeo de O(Y ) a O(X), el cual es claramente un homomorfismo de k-álgebras. Pero por (3.4) hemos visto que O(Y ) ∼
= A(Y ), por lo tanto obtenemos un
homomorfismo A(Y ) −→ O(X). Esto define a α.
Recı́procamente, sea h : A(Y ) −→ O(X) un homomorfismo de k-álgebras. Suponga que Y es
un subconjunto cerrado de An , de manera que A(Y ) = k[x1 , . . . , xn ]/I(Y ). Sea xi la imagen de
xi en A(Y ), y consideremos los elementos ξi = h(xi ) ∈ O(X). Estas son funciones globales en X,
ası́ que podemos utilizarlas para definir un mapeo ψ : X −→ An por ψ(P ) = (ξ1 (P ), . . . , ξn (P ))
para P ∈ X.
A continuación mostramos que ψ(X) ⊆ Y . Como Y = Z(I(Y )), es suficiente probar que ∀ P ∈
X, ∀ f ∈ I(Y ) : f (ψ(P )) = 0. Pero
f (ψ(P )) = f (ξ1 (P ), . . . , ξn (P )).
Ya que f es un polinomio y h es un homomorfismo de K-álgebras, tenemos
f (ξ1 (P ), . . . , ξn (P )) = h(f (x1 , . . . , xn ))(P ) = 0
ya que f ∈ I(Y ). Por lo tanto ψ define un mapeo de X a Y , que induce el homomorfismo dado
h. Para completar la prueba debemos mostrar que ψ es un morfismo. Esto es una consecuencia del
siguiente lema.
Lema 3.8. Sea X una variedad y Y ⊆ An una variedad afı́n. Un mapeo de conjuntos ψ : X −→
Y es un morfismo si, y solo si, xi ◦ ψ es una función regular en X para todo i, donde x1 , . . . , xn
son las funciones coordenadas en An .
Demostración. Si ψ es un morfismo, entonces las xi ◦ ψ deben ser funciones regulares, por la
definición de morfismo. Recı́procamente, suponga que las funciones xi ◦ ψ son regulares, entonces
para todo polinomio f (x1 , . . . , xn ), f ◦ ψ es también regular en X. Ya que los conjuntos cerrados
de Y están definidos por la anulación de funciones polinomiales, y como las funciones regulares son
continuas, vemos que ψ −1 envı́a conjuntos cerrados en conjuntos cerrados, por lo tanto ψ es continua.
Finalmente, como las funciones regulares en conjuntos abiertos de Y son localmente cocientes de
polinomios, g ◦ ψ es regular para cualquier función regular g en cualquier conjunto abierto de Y .
Ası́ ψ es un morfismo.
∗
Corolario 3.9 (Criterio de isomorfismo para variedades afines). Si X y Y son dos variedades afines, entonces X y Y son isomorfas si, y solo si, A(Y ) y A(X) son isomorfas como
k-álgebras.
Demostración. Inmediato de la proposición anterior.
∗
En el lenguaje de las categorı́as, el resultado anterior se puede expresar como sigue:
Corolario 3.10. El funtor contravariante X 7→ A(X) induce una equivalencia de categorı́as
entre la categorı́a de las variedades afines sobre k y la categorı́a de los dominios enteros finitamente
generados sobre k.
3.3 Ejemplo: Aunque hasta este momento sólo nos hemos concentrado en conjuntos algebraicos
irreducibles, tenemos que la equivalencia anterior se puede ampliar un poco más de la siguiente
manera. Sea X ⊆ An cualquier conjunto algebraico, entonces se puede demostrar (ver [S+ 00], página
55
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
57, y [Har77], página 71, Proposición 2.2) que O(X) ∼
= A(X) = A/I(X). Definimos la categorı́a C
de los conjuntos algebraicos de la siguiente forma, Ob C constará de todos los conjuntos algebraicos,
y si X, Y ∈ Ob C , entonces:
HomC (X, Y ) = {f : X −→ Y | f es restricción de un mapeo polinomial entre los espacios ambiente},
i.e., supongamos que X ⊆ An y Y ⊆ Am , entonces un morfismo f : X −→ Y está dado por
f = (f1 , . . . , fm ), donde ∀ i ∈ {1, . . . , m} : fi ∈ k[x1 , . . . , xn ]. Consideremos la categorı́a A de todas
las k-álgebras con mapeos entre k-álgebras como morfismos de los objetos de la categorı́a.
Dado f ∈ HomC (X, Y ), como anteriormente induce un homomorfismo de k-álgebras f ∗ : A(Y ) −→
A(X) por medio de la composición de funciones. Definimos el funtor F : C −→ A dado por
F (X) = A(X) y ∀ ϕ ∈ HomC (X, Y ) : F ϕ := ϕ∗ .
Probaremos a continuación que el funtor contravariante F es fiel, pleno y denso cuando nos restringimos a la subcategorı́a A0 de las k-álgebras reducidas finitamente generadas (Vea la página
104 del Apéndice A para los detalles necesarios).
Densidad. Se tiene del Ejemplo 1.8.
Plenitud. Sea σ ∈ HomA0 (R, S), por el punto anterior, podemos elegir presentaciones para
R y S y escribir σ : k[x1 , . . . , xn ]/I −→ k[y1 , . . . , ym ]/J, donde I y J son radicales. Para
j = 1, . . . , n, sean fj ∈ σ(xj ) y definimos el mapeo polinomial F : Am −→ An dado por
a = (a1 , . . . , am ) 7→ (f1 (a), . . . , fn (a)). A continuación sea a ∈ V = Z(J), y queremos probar
que F (a) ∈ W = Z(I). Para esto basta verificar que F (a) está en el conjunto de ceros de todo
polinomio g ∈ I. Utilizando el hecho de que fj = σ(xj ), vemos que para g ∈ I,
g(F (a)) = g(f1 (a), . . . , fn (a)) = g(σ(x1 )(a), . . . , σ(xn )(a)) = σ(g)(a) = 0.
Ya que g ∈ I, tenemos que σ(g) ∈ J, por lo que (∀ a ∈ V ) (∀ g ∈ I) : σ(g)(a), y se sigue que
∀ g ∈ I : g(F (a)) = 0. Por lo tanto F (a) ∈ W y F envı́a V a W . Sin dificultad se verifica
que F ∗ = σ. Si elegimos otros representantes gj para la clase de equivalencia de σ(xj ) para
formar el mapeo G : Am −→ An , tenemos que para todo j ∈ {1, . . . , n}, la diferencia fj − gj
se anula en V , por lo que G se restringe a F en V .
Fidelidad. Dados σ : R −→ S, F : V −→ W como el punto anterior, supongamos que
existen ideales radicales I 0 ⊆ k[x1 , . . . , xs ] y J 0 ⊆ k[x1 , . . . , xt ], y un morfismo G : W 0 −→ V 0
(donde W 0 = Z(J 0 ) y V 0 = Z(I 0 )) tales que σ = G∗ : A(V 0 ) −→ A(W 0 ), en particular,
∼
∼
existen isomorfismos de k-álgebras ϕ : A(V ) −→ A(V 0 ) y ψ : A(W ) −→ A(W 0 ) y, como F es
pleno, tenemos que existen morfismos ϕ : V −→ V 0 y ψ : W −→ W 0 , los cuales resultan ser
isomorfismos. Se verifica que el siguiente diagrama es conmutativo :
F
V
∼
=
V0
/W
G
∼
=
/ W0
Por la propiedad de que todo funtor que es fiel, pleno y denso induce una equivalencia de
categorı́as, tenemos que F induce una antiequivalencia (en el sentido de que es un funtor
contravariante) entre las categorı́as C y A0 .
56
3.1. La Categorı́a de las Variedades Algebraicas
3. Morfismos
3.4 Ejemplo (Subconjuntos cerrados bajo un morfismo de variedades afines): Sean X y
Y dos variedades afines y f : X −→ Y un morfismo. Sea φ : O(Y ) −→ O(X) el homomorfismo
de k-álgebras inducido por f . Siguiendo con la discusión del Ejemplo 3.2, podemos identificar
a los subconjuntos cerrados de X (respectivamente de Y ) con ideales del anillo A(X) = O(X)
(respectivamente A(Y ) = O(Y )).
1. Sea W un subconjunto cerrado de X, digamos W = Z(a), donde a ⊆ A(X). Entonces se tiene
que f (W ) = Z(φ−1 (a)).
Para probar lo anterior, veremos que I(f (W )) = φ−1 (a). Sea g ∈ I(f (W )), entonces ∀ P ∈
W : g(f (P )) = 0, pero esto dice que φ(g) = g ◦ f ∈ I(W ) = a, de donde se desprende
que g ∈ φ−1 (a). Recı́procamente, tomemos g ∈ φ−1 (a), entonces φ(g) = g ◦ f ∈ a, lo cual
significa que ∀ P ∈ W : (g ◦ f )(P ) = 0, por lo que g ∈ I(f (W )). Por lo tanto concluimos que
I(f (W )) = φ−1 (a), y del inciso e) de la Proposición 1.3, f (W ) = Z(I(f (W ))) = Z(φ−1 (a)).
2. Sea W 0 un subconjunto cerrado de Y , digamos W 0 = Z(b), donde b es un ideal de A(Y ).
entonces f −1 (W 0 ) es eñ conjunto cerrado Z(hφ(a)i).
Sea P ∈ W 0 y g ∈ b, entonces se tiene que φ(g)(f −1 (y)) = g(y) = 0. Por lo tanto f −1 (W 0 ) ⊆
Z(hφ(b)i). recı́procamente, si P ∈ Z(hbi), entonces ∀ g ∈ b : g(f (P )) = φ(g)(P ) = 0. Por lo
tanto Z(hφ(b)i) ⊆ f −1 (Z), de donde se sigue la igualdad.
A continuación veremos otro ejemplo en donde utilizamos términos de la Teorı́a de Categorı́as.
3.5 Ejemplo (El anillo local de un punto como un lı́mite directo): Sea X una variedad y
P ∈ X un punto de ella. Dado cualquier conjunto abierto U ⊆ X tal que P ∈ U , podemos definir
un mapeo ΦU : O(U ) −→ OP , dado por f 7→ hU, f i. A continuación probaremos que el anillo local
de un punto P (que hemos denotado por OP ) tiene una descripción alternativa.
Si U ⊆ V son conjuntos abiertos de X que contengan a P , entonces tenemos un mapeo ϕV U :
O(V ) −→ O(U ) definido por la restricción de funciones. Claramente si U ⊆ V ⊆ W son conjuntos
abiertos que contienen a P , entonces la siguiente composición de mapeos
ϕ
ϕ
WV
VU
O(W ) −→
O(V ) −→
O(U )
es la misma que ϕV U ◦ ϕW V : O(W ) −→ O(U ). También, dados cualesquiera dos conjuntos abiertos
U y V que contengan a P , entonces U ∩ V es un conjunto abierto no vacı́o que contiene a P , y por
lo tanto tenemos mapeos O(U ) −→ O(U ∩ V ) y O(V ) −→ O(U ∩ V ). Por lo tanto, la familia de
conjuntos abiertos {O(U ) | P ∈ U } junto con los mapeos descritos anteriormente forman un sistema
dirigido (en el sentido de la definición de la página 104) de conjuntos y mapeos. Afirmamos que el
lı́mite directo de este sistema dirigido, el cual denotaremos por limP ∈U O(U ), es isomorfo a OP .
−→
Para esto vemos que para cualquier conjunto abierto U que contiene a P , tenemos el morfismo
ΦU : O(U ) −→ OP descrito con anterioridad, y es fácil ver que si V es cualquier conjunto abierto
tal que U ⊇ V ⊇ {P }, entonces el siguiente diagrama
O(U )
ϕU V
FF
FF
FF
ΦU FF"
OP
57
/ O(V )
x
x
x
xxΦ
x
|xx V
3.2. Ejemplos y Contraejemplos
3. Morfismos
es conmutativo. Por lo tanto sabemos que existe un único mapeo ψ : limp∈U O(U ) −→ OP tal que
−→
para todo conjunto abierto V que contenga a P , el diagrama
O(V )
/ lim
O(U )
MMM −→P ∈U
MMM
MM
ψ
ΦV MMMM
& OP
es conmutativo. A continuación mostraremos que éste único mapeo ψ es un isomorfismo.
Dado hU, f i ∈ OP , tenemos que existe un conjunto abierto U y f ∈ O(U ) tal que ΦU (f ) = hU, f i.
Entonces se sigue de la conmutatividad del diagrama anterior que la imagen de f en limP ∈U O(U )
−→
bajo el mapeo O(V ) −→ limP ∈U O(U ) va a dar bajo el mapeo ψ a hU, f i, lo que muestra que ψ es
−→
un epimorfismo.
A continuación supongamos que x, y ∈ limP ∈U O(U ) son tales que ψ(x) = ψ(y). Sean f ∈ O(U ) y
−→
g ∈ O(V ) tales que sus imágenes en limP ∈U O(U ) son x y y respectivamente. Entonces sabemos que
−→
ΦU (f ) = ΦV (g), lo que significa que f = g en W = U ∩ V , donde P ∈ W es un conjunto abierto.
Ası́ llegamos al siguiente diagrama conmutativo:
O(W )
8
fMMM
MMϕMV,W
qqq
q
q
MMM
qq
q
MM
q
qq
/ lim
O(U ) o
O(U )
O(V )
MMM −→P ∈U
q
q
MMM
q
qq
MM
ψ
qqqΦV
q
ΦU MMMM
q
& xqq
ϕU,W
OP
y ya que el diagrama se factoriza a través de O(W ), se sigue que las imágenes de f y g en
limP ∈U O(U ) son iguales, pues sus imágenes ya son las mismas en O(W ). Por lo tanto concluimos
−→
que x = y, y esto nos dice que ψ es un isomorfismo.
3.2.– Ejemplos y Contraejemplos
En esta sección utilizaremos la teorı́a desarrollada a lo largo de la Sección 3.1 para ofrecer
diversos ejemplos que ilustran la naturaleza de la categorı́a de las variedades algebraicas, para lo
cual utilizaremos fuertemente la Proposición 3.7.
3.6 Ejemplo: Si U = A1 − {a1 , . . . , an } es un conjunto abierto propio de A1 , entonces O(U )
consiste
Q de las funciones racionales g(x) en la variable x tal que g no tenga polos en U , i.e., g(x) =
p(x)/ ni=1 (x − ai )mi , donde p ∈ k[ x ] y mi ∈ N ∪ {0}, lo que queremos decir en realidad es que
O(U ) = k[x, (x − a1 )−1 , . . . , (x − an )−1 ], y evidentemente k[ x ] no puede ser de ninguna manera
isomorfo a un anillo de éste tipo. De esto se sigue que A1 no es isomorfo a ningún subconjunto
abierto de él mismo.
3.7 Ejemplo: Aunque el mapeo subyacente de un morfismo de variedades sea un homeomorfismo,
esto no implica que dicho morfismo sea un isomorfismo. Por ejemplo, sea ϕ : A1 −→ A2 el mapeo
definido por t 7→ (t2 , t3 ). Entonces ϕ define un morfismo biyectivo y bicontinuo de A1 sobre la curva
cuspidal C definida por Z(y 2 − x3 ), ya que ϕ−1 : C −→ A1 viene dada por (a, b) 7→ ab y (0, 0) 7→ 0.
Intuitivamente, a cada punto (t2 , t3 ) ∈ C le asignamos la “pendiente” t3 /t2 de la única recta L(t)
que parte del origen y pasa por dicho punto (ver Figura 3.1). De esta discusión se ve que ϕ es
58
3.2. Ejemplos y Contraejemplos
3. Morfismos
A1
A2
(t 2 ,t )
3
L(t)
t
A1
Figura 3.1: La curva afı́n Z(y 2 − x3 ).
biyectiva. Sabemos que la topologı́a de Zariski de la lı́nea afı́n es la topologı́a cofinita (Ejemplo 1.1),
pero ésta también es la topologı́a de Zariski inducida en C (de hecho, en cualquier curva algebraica
irreducible), por lo que ϕ es bicontinua. Se sigue que ϕ es un homeomorfismo de espacios topológicos.
Es evidente que es un morfismo, supongamos que define un isomorfismo, entonces define un mapeo
en los anillos coordenados como sigue
ψ : k[x, y]/ y 2 − x3 −→ k[ t ]
x 7→ t2
y 7→ t3 ,
pero este mapeo no es suprayectivo (t ∈ k[ t ] no se encuentra en Im ψ). Por lo tanto las variedades
no pueden ser isomorfas.
Una forma alternativa
deresolver este problema es la siguiente. Como C es afı́n, tenemos que O(C) =
A(C) = k[x, y]/ y 2 − x3 , por lo tanto, dada f ∈ O(C), tenemos que f = P (x) + Q(y) + R(x, y),
donde P (x) ∈ k[ x ], Q(y) ∈ k[y] y R(x, y) ∈ k[x, y] es tal que deg R ≥ 2. Además, como y 2 = x3 ,
dado n ≥ 2, si n es par, entonces y n = (x3 )n/2 , si n es impar, digamos n = 2m + 1, entonces
y n = (x3 )m y, por lo tanto, podemos cambiar a Q(y) y a R(x, y) por polinomios Q0 (x)y y R0 (x)y. De
esta manera, toda función regular en C f es de la forma P (x) + Q(x)y, donde P (x), Q(x) ∈ k[ x ]. Si
deseamos hallar una función regular ϕ tal que ϕ ◦ ψ = idX , entonces llegamos a la siguiente ecuación
P (t2 ) + Q(t2 )t3 = t, la cual claramente es imposible de resolver.
Otro ejemplo se da al considerar un campo base k con char k = p > 0, y definimos el mapeo
ϕ : A1 −→ A1 dado por t 7→ tp (conocido como el mapeo de Frobenius, el cual es muy importante
en Teorı́a Algebraica de los Números). Esto tiene sentido pues, como sabemos, en caracterı́stica p,
se tiene la agradable propiedad de que ∀ x, y ∈ k : (x + y)p = xp + y p . Por esta propiedad, se
tiene que ϕ es inyectiva. Para ver que ϕ es suprayectiva basta notar que como k es algebraicamente
cerrado, (∀ t ∈ k) (∃ s ∈ k) : sp = t. Nuevamente, ϕ es bicontinua, para ver esto, basta considerar
la imagen inversa ϕ−1 ({a}), donde a ∈ A1 . Se tiene que ϕ−1 ({a}) = {t ∈ A1 | tp = a} = Z(xp − a),
la cual es un conjunto cerrado.
Si ϕ fuese un isomorfismo de variedades, tendrı́amos que el mapeo inducido en los anillos coordenados ϕ∗ : k[ x ] −→ k[ x ] dado por x 7→ xp serı́a un isomorfismo de k-álgebras, pero vemos que
x∈
/ ϕ∗ (k[ x ]), por lo que dicho mapeo no puede ser suprayectivo.
59
3.2. Ejemplos y Contraejemplos
3. Morfismos
3.8 Ejemplo: Si una variedad afı́n es isomorfa a una variedad proyectiva, entonces ésta consiste
de un solo punto.
∼
Tomemos X una variedad proyectiva y Y una variedad afı́n, con ψ : X −→ Y un isomorfismo.
En particular, ψ es biyectivo como mapeo de conjuntos, luego ψ(X) = Y . Por (3.8), se tiene que
∀ i ∈ {1, . . . n} : xi ◦ ψ ∈ O(X), donde xi son las funciones coordenadas en An . Sabemos que
O(X) = k, luego, ∀ i : xi ◦ ψ = ai ∈ k. Tenemos que idAn = (x1 , . . . , xn ) y
(idAn ◦ ψ)(X) = (a1 , . . . , an ).
Luego, idAn (ψ(X)) = idAn (Y ) = Y = (a1 , . . . , an ).
3.9 Ejemplo: De los Ejemplos 1.9 y 1.19, tenemos que las variedades afines A1 , Z(y 2 − x) ⊂ A2 y
Z(x2 − y, x3 − z) ⊆ A3 , son isomorfas, pues su anillo coordenado es un anillo de polinomios en una
variable sobre k (Ver Figura 3.2). De hecho, sea nuevamente Z la curva plana definida por xy − 1 y
z
A2
A1
A3
y
y
x
(a)
x
(b)
(c)
Figura 3.2: (a) La lı́nea afı́n, (b) la parábola Z(y 2 − x) y (c) la cúbica torcida Z(x2 − y, x3 − z) son isomorfas.
sea Y la lı́nea afı́n “perforada” A1 − {0}. Por abuso de lenguaje, decimos que una variedad es “afı́n”
si es isomorfa a una variedad afı́n. Sea π : Z −→ Y la proyección natural π(x, y) = x, la cual define
un isomorfismo de variedades (siendo el morfismo inverso π −1 : Y −→ Z dado por (x) 7→ (x, x−1 )).
Por lo tanto Z ∼
= Y y ası́ decimos que Y es una variedad afı́n. Por el Ejemplo 1.10, concluimos que
toda cónica en A2 es isomorfa a A1 ó a A1 − {0}, las cuales no pueden ser isomorfas, como ya hemos
mostrado.
3.10 Ejemplo: Existen variedades cuasi-afines que no son variedades afines. A continuación mostraremos que X = A2 − {(0, 0)} no es una variedad afı́n.
Primero, observemos que O(X) ⊇ k[x, y], mostraremos que éstos son iguales. Consideremos f ∈
O(X) y una cubierta abierta {Uα } de X. Entonces f |Uα es una función racional en A2 y, como tal,
∃ gα , hα ∈ k[x, y] tales que f |Uα = gα /hα , con gcd (gα , hα ) = 1. Tenemos que ∀ α, β, Uα ∩ Uβ 6= ∅ es
un conjunto abierto denso, con gα /hα = gβ /hβ en Uα ∩ Uβ , por lo tanto gα /hβ = gβ /hα en Uα ∩ Uβ ,
por lo tanto tenemos la misma igualdad en todo A2 . Ası́ gα |gβ y gβ |gα , luego gα = gβ y por lo tanto
también hα = hβ , i.r., f = gα /hα en todo X. Pero Z(hα ) es un subconjunto algebraico de A2 de
dimensión 1, y f no puede estar definida en todo X, a menos que hα ∈ k. En este caso, f ∈ k[x, y].
60
3.2. Ejemplos y Contraejemplos
3. Morfismos
Supongamos a continuación que X es una variedad afı́n, ya que O(X) = k[x, y] = O(A2 ), tomemos
id : O(X) −→ O(A), de acuerdo a la prueba de (3.7), tenemos que este mapeo induce el mapeo
id : A2 −→ A2 , el cual, por la misma demostración, envı́a A2 en X. Pero esto es una contradicción.
Por lo tanto concluimos que X no es afı́n.
3.11 Ejemplo (Automorfismos de An ): Sea ϕ ∈ Hom (An , An ) que esté dado por n polinomios
f1 , . . . , fn ∈ k[x1 , . . . , xn ], y sea Jϕ = det (∂fi /∂xj )1 el polinomio Jacobiano de ϕ. Si ϕ es un
isomorfismo (en cuyo caso llamamos a ϕ un automorfismo de An ) mostrar que la asignación ϕ 7→ Jϕ
define un homomorfismo de grupos entre Hom (An , An ) y k ∗ .
Si ϕ : An −→ An es un isomorfismo, entonces ϕ induce el siguiente automorfismo de k[x1 , . . . , xn ]:
ϕ∗ : k[x1 , . . . , xn ] −→ k[x1 , . . . , xn ]
h(x1 , . . . , xn ) 7→ h(f1 , . . . , fn )
Mostraremos primero que
n
∂h(f1 , . . . , fn ) X ∂h(f1 , . . . , fn ) ∂fj
=
, ∀ i ∈ {1, . . . , n}.
∂xi
∂xj
∂xi
(*)
j=1
P
Como h(x1 , . . . , xn ) =
ai1 ...in xi11 · · · xinn y las derivadas parciales son operadores lineales, basta
Q
probar esto para el caso en que h(x1 , . . . , xn ) = nk=1 xikk , en este caso se tiene que
n
X
∂h(x1 , . . . , xn )
∂xj
j=1
por lo que
∂xj
n
X
i −1
· · · xinn ,
i −1
· · · fn
ij xi11 · · · xjj
j=1
n
X
∂h(f1 , . . . , fn ) ∂fj
j=1
=
∂xi
=
n
X
ij f1i1 · · · fj j
j=1
∂fj
.
∂xi
(**)
Por otro lado
i2
in
∂h(f1 , . . . , fn )
i1 −1 i2
i1 ∂(f2 · · · fn )
in ∂f1
= i1 f1 f2 · · · fn
+ f1
∂xi
∂xi
∂xi
∂f1
∂f2
∂(f3i3 · · · fnin )
= i1 f1i1 −1 f2i2 · · · fnin
+ i2 f1i1 fxi2 −1 f3i3 · · · fnin
+ f1i1 f2i2
∂xi
∂xi
∂xi
..
.
= i1 f1i1 −1 f2i2 · · · fnin
∂fn−1
∂f in
∂f1
in−1 −1
+ · · · + in−1 f1i1 · · · fn−1
fn
+ f1 · · · fn−1 n .
∂xi
∂xi
∂xi
Por lo tanto la relación ( * ) es verdadera.
A continuación, como ϕ∗ es suprayectivo, entonces ∀ i ∈ {1, . . . , n} ∃ hi ∈ k[x1 , . . . , xn ] : xi =
hi (f1 , . . . , fn ). Por lo anterior, como ∀ i, j ∈ {1, . . . , n} : ∂xi /∂xj = δij , entonces
δij =
n
X
∂hi (f1 , . . . , fn ) ∂fk
k=1
∂xk
∂xj
,
1
La noción de derivada parcial de un polinomio con respecto a una des sus variables tiene sentido sobre cualquier
campo. Lo único que tenemos que hacer es aplicar las ya conocidas reglas de diferenciación. De esta manera no
necesitamos ningún proceso de lı́mite para definirlas.
61
3.3. Morfismos entre Espacios Proyectivos
3. Morfismos
y esto equivale al siguiente producto matricial:
∂h1 (f1 ,...,fn )
1 ,...,fn )
· · · ∂h1 (f∂x
∂x1
n
1 0 ··· 0
0 1 ··· 0 . . . . . . . . . . . . . . . . . . . . .
∂hi (f1 ,...,fn )
1 ,...,fn )
I= . . .
· · · ∂hi (f∂x
.. =
∂x1
n
.
.
.
. .
. .
.....................
0 0 ··· 1
∂hn (f1 ,...,fn )
n)
· · · ∂hn (f∂x1 ,...,f
∂x1
n
∂f
∂f1
∂f1
1
·
·
·
·
·
·
∂x
∂xj
∂xn
1
. . . . . . . . . . . . . . . . . . .
∂fn
∂fn
∂fn
· · · ∂x
∂x1 · · ·
∂xj
n
Llamamos A a la matriz (∂hi /∂xj ), al sacar el determinante se sigue que 1 = (det A)(det (∂fi /∂xj )),
por lo que Jϕ = det (∂fi /∂xj ) ∈ k[x1 , . . . , xn ]∗ , por lo tanto Jϕ ∈ k ∗ . También hemos visto que si
ϕ = (f1 , . . . , fn ), ψ = (g1 , . . . , gn ) ∈ Aut (An ), entonces Jϕ◦ψ = Jϕ · Jψ ∈ k ∗ , de donde se sigue el
resultado.
3.3.– Morfismos entre Espacios Proyectivos
Existe también una descripción local de los morfismos entre variedades. Consideremos dos variedades X y Y , junto con un mapeo de conjuntos f : X −→ Y . Sea {Yα } una cubierta abierta
de Y . Si x ∈ X y f (x) ∈ Yα , suponga que existe un conjunto abierto Ux,α con x ∈ Ux,α tal que
f (Ux,α ) ⊆ Yα , entonces se tiene el siguiente resultado.
Teorema 3.11 (Naturaleza local de un morfismo). Un mapeo de conjuntos entre dos variedades f : X −→ Y es un morfismo si, y solo si, todos los mapeos f : Ux,α −→ Yα son
morfismos.
Demostración. Supongamos que f es un morfismo y consideremos f : Ux,α −→ Yα y sea U ⊆ Yα
cualquier conjunto abierto, entonces tenemos que U es abierto en Y (pues es la intersección de dos
conjuntos abiertos en Y ), y de esta manera, f −1 (U ) ⊆ X es abierto, lo cual implica que f −1 (U )∩Ux,α
es abierto en Ux,α , pero observemos que f −1 (U ) ∩ Ux,α es f −1 (U ) al restringir f a Ux,α , por lo que
f es continua.
A continuación sea V un conjunto abierto en Yα , lo cual implica que V es abierto en Y . Tomemos
g ∈ O(V ), entonces g ◦ f : f −1 (V ) ∩ Ux,α −→ k es regular, pero ya que f −1 (V ) ∩ Ux,α ⊆ f −1 (V ), se
tiene que O(f −1 (V ) ∩ Ux,α ) ⊇ O(f −1 (V )). Por lo tanto concluimos que g ◦ f : f −1 (V ) ∩ Ux,α −→ k
es regular, y de esta manera f : Ux,α −→ Yα es un morfismo.
Supongamos ahora que ∀ α : f : Ux,α −→ Yα son morfismos. Sea V ⊆ Y abierto, entonces
V = ∪α (V ∩ Yα ), por lo que f −1 (V ) = f −1 (∪α (V ∩ Yα )) = ∪α f −1 (V ∩ Yα ), donde todos los
conjuntos f −1 (V ∩ Yα ) ⊆ Ux,α son abiertos, ası́ ∀ α : f −1 (V ∩ Yα ) es abierto en X, de donde se
sigue que f −1 (V ) es abierto y de esta forma f es una función continua.
Sea V ⊆ Y un conjunto abierto con g ∈ O(V ), y ya que f −1 (V ) = ∪α f −1 (V ∩ Yα ), entonces
(∀ x ∈ f −1 (V )) (∃ β) : x ∈ f −1 (V ∩ Yβ ). Como V ⊃ V ∩ Yβ , tenemos que O(V ) ⊆ O(V ∩ Yβ ), ası́,
g ◦ f : f −1 (V ∩ Yβ ) −→ k es una función regular, por lo que hallamos una vecindad Ωx de x en Ux,β ,
la cual a su vez es una vecindad de x en X tal que g ◦ f = γ/δ, donde γ, δ ∈ A y ∀ y ∈ Ωx : δ(y) 6= 0
(ó γ, δ ∈ S polinomios homogéneos del mismo grado, según X sea cuasi-afı́n o cuasi-proyectiva), y
de esta manera, g ◦ f : f −1 (V ) −→ k es una función regular, lo cual culmina la prueba.
∗
Utilizaremos este criterio local para dar una descripción agradable de los morfismos de Pn a Pm .
Ası́, supongamos que ψ : Pn −→ Pm es un mapeo de conjuntos continuo y consideremos la cubierta
canónica {U0 , . . . , Um } de Pm . Definimos ∀ i : Vi = ψ −1 (Ui ), entonces tenemos las restricciones
ψi : Vi −→ Ui de ψ a los conjuntos V1 , . . . , Vm que cubren a Pn . Por la naturaleza local para un
morfismo (Teorema 3.11), ψ es un morfismo si, y solo si, todos los ψi son morfismos.
62
3.3. Morfismos entre Espacios Proyectivos
3. Morfismos
Ya que ∀ i : Ui ∼
= Am , podemos utilizar el Teorema 3.7 para ver que ψi es un morfismo si, y solo
si ∃ ψi1 , . . . , ψim ∈ O(Vi ) : ψi = (ψi1 , . . . , ψim ). Pero, ya que las funciones ψij , i, j = 1, . . . , m son
funciones regulares en los conjuntos abiertos Vi ⊂ Pn , se sigue que son funciones racionales en Pn .
Afortunadamente conocemos bien las funciones racionales en Pn , las cuales son localmente cocientes
de polinomios homogéneos del mismo grado. De hecho, ya que S es un DFU, sabemos que en Pn
toda función racional tiene un representante cuyo dominio de definición es el dominio de definición
de la función racional. Dicho representante es el cociente de dos polinomios del mismo grado que
no tienen factores en común, y es el único represente de la función racional que se puede escribir de
esta manera. El dominio de definición de la función racional es el conjunto de elementos distintos
de cero del denominador de dicha representación.
Por lo tanto, si elegimos una representación para ψij que cumpla con lo que hemos
mencionado,
i1
im
se tiene que el denominador no se puede anular en todo Vi , i.e., podemos escribir ψi = fgi1
, · · · , fgim
,
donde los fij , gij tienen el mismo grado dij , gcd (fij , gij ) = 1, y ninguno de los gij se anula en Vi .
Si elegimos un denominador común gi , tenemos que podemos escribir ψi como ψi = hgi1i , · · · , hgim
,
i
donde gi no se anula en Vi y ∀ j ∈ {1, . . . , m} : deg gi = deg hij . (En este caso hemos perdido la
condición de que el numerador y el denominador de cada función coordenada no tuvieran ningún
factor en común.)
A continuación supondremos por simplicidad que Ui = U0 , en cuyo caso podemos describir ψ0
por
ψ0 = [g0 : h01 : · · · : h0m ], donde ∀ x ∈ V0 , ψ(x) = [g0 (x) : h01 (x) : · · · : h0m (x)].
Hacemos lo mismo en el conjunto abierto Ui , colocando en la i-ésima entrada el denominador de
la correspondiente ψi . Por lo tanto, vemos que ψ : Pn −→ Pm da origen a una familia de m + 1
conjuntos de m + 1 polinomios homogéneos (donde los polinomios en cada conjunto tienen el mismo
grado). Sin embargo, tenemos que estos conjuntos de polinomios no son independientes entre si. Para
ver esto, sea (α0 , α1 , · · · : αm ) uno de tales conjuntos, donde los αi ∈ S son polinomios homogéneos
del mismo grado (digamos d − 1), y supongamos que este (m + 1)-tuple describe a la función ψ en el
conjunto abierto V1 . Supongamos también que (β0 , β1 , · · · , βm ) describe a ψ en el conjunto abierto
V2 .
Ahora, como V1 ∩ V2 6= ∅, se tiene que las dos representaciones de ψ deben coincidir en dicho
conjunto, i.e., ∀ x ∈ V1 ∩ V2 : (α0 (x) : · · · : αm (x)) = (β0 (x) : · · · : βm (x)), o lo que es lo mismo,
todos los menores de dimensión 2 × 2 de la siguiente matriz se anulan:
α0 α1 · · · αm
.
β0 β1 · · · βm
Definimos a continuación el conjunto
F := {(f0 , . . . , fm ) ⊂ S m+1 | ∃ n ≥ 0 tal que fi ∈ Sn ∀ i = 0, . . . , m}
y establecemos una relación de equivalencia en F, estableciendo que
g0 · · ·
[g0 , . . . , gm ] ∼ [h0 , . . . , hm ] ⇔ el rango de
h0 · · ·
gm
gm
es 1.
Por lo tanto, todo morfismo ψ : Pn −→ Pm es una clase de equivalencia G ∈ F/ ∼ con la propiedad
adicional de que ∀ x ∈ Pn ∃ (g0 , . . . , gm ) ∈ G tal que no todos los gi se anulan en x.
63
3.3. Morfismos entre Espacios Proyectivos
3. Morfismos
Ahora tomemos dos representantes (α0 , . . . , αm ) y (β0 , . . . , βm ) para el morfismo ψ. Entonces,
es fácil ver que ∀ i, j ∈ {0, . . . , m} : αi βj = βi αj . Sea α = gcd (α0 , . . . , αm ) y β = gcd (β0 , . . . , βm ),
y notemos que (α0 /α, . . . , αm /α) = (f0 , . . . , fm ) y (β0 /β, . . . , βm /β) = (g0 , . . . , gm ) sigue siendo una pareja de polinomios equivalentes, pero con la ventaja de que gcd (f0 , . . . , fm ) = 1 =
gcd (g0 , . . . , gm ).
Afirmamos que ∀ P ∈ Pn : [f0 (P ) : · · · : fm (P )] = [g0 (P ) : · · · : gm (P )]. Para ver esto,
sea h cualquier factor irreducible de f0 , y sea s la máxima potencia a la cual h divide a f0 . A
continuación sea j ∈ {1, . . . , m} tal que h - fj , y como f0 gj = g0 fj , concluimos que hs | g0 , por
lo que f0 | g0 . De manera similar obtenemos que g0 | f0 . Por lo tanto, ∃c0 ∈ k ∗ : g0 = c0 f0 .
Repitiendo el mismo argumento, vemos que ∀ i ∈ {0, . . . , m} ∃ ci ∈ k ∗ : gi = ci fi . Pero como
∀ i, j ∈ {0, . . . , m} : fi gj = gi fj , podemos suponer c0 = c1 = · · · = cm = c, de donde se desprende
que [f0 (P ) : · · · : fm (P )] = [g0 (P ) : · · · : gm (P )] para todo P ∈ Pn , que es lo que querı́amos probar.
Todo este trabajo ha sido para establecer el siguiente teorema.
Teorema 3.12. Todo morfismo ψ : Pn −→ Pm es de la forma (ψ0 , . . . , ψm ), donde los ψi son
polinomios homogéneos del mismo grado tales que ∀ P ∈ Pn ∃ i ∈ {0, . . . , m} : ψi (P ) 6= 0.
∗
Demostración. Inmediata.
Utilizando esta caracterización de los morfismos entre espacios proyectivos, podemos describir
fácilmente otro mapeo muy interesante.
3.12 Ejemplo (Proyección desde un punto): Sea Pn un hiperplano de Pn+1 y sea P ∈ (Pn+1 −
Pn ). Si S = k[x0 , . . . , xn+1 ] es el anillo coordenado homogéneo de Pn+1 entonces, sin pérdida de
generalidad, podemos suponer que Pn es el hiperplano definido por xn+1 = 0 y que P = [0 : 0 : · · · :
0 : 1]. A continuación, consideremos el mapeo ψ : (Pn+1 − P ) −→ Pn dado por [a0 : · · · : an+1 ] 7→
[a0 : · · · : an ] (Ver la Figura 3.3). Veamos a continuación que si Q ∈ (Pn+1 − P ), entonces ψ(Q) es
P
n+1
Y
n
Figura 3.3: Proyección desde un punto.
el único punto en el cual la lı́nea que une a P y Q interseca al hiperplano Pn = Z(xn+1 ). Para ver
esto, consideremos el conjunto
x0 · · · xn
−1
ψ ([a0 : · · · : an ]) = [x0 : · · · : xn+1 ] | el rango de
es 1 .
a0 · · · an
64
3.3. Morfismos entre Espacios Proyectivos
3. Morfismos
Ya que ψ no está definida en P , podemos suponer que ∃ i ∈ {0, . . . , n} : ai 6= 0, por lo que al dividir
entre dicha cantidad la segunda fila, obtenemos la matriz equivalente
x0 · · · xi · · · xn
,
a0
· · · 1 · · · aani
ai
y esta matriz tiene rango 1 si, y solo si, todos los menores de dimensión 2 × 2 que involucran a la
i-ésima columna se anulan, i.e., hablamos de las soluciones del sistema de ecuaciones lineales dado
por xj − (aj /ai )xi = 0, j = 0, . . . , n, j 6= i. Es fácil ver que este es un sistema de n ecuaciones de
rango n, por lo que define una lı́nea en Pn+1 que contiene a P y a [a0 : · · · : an+1 ], por lo que hemos
terminado.
Ahora consideremos ψ la inmersión 3-ésima de Veronese de P1 en P3 , cuya imagen Y es la curva
cúbica torcida. Si t, u son las coordenadas homogéneas en P1 , decimos que Y es la curva dada
paramétricamente por [x : y : z : w] = [t3 : t2 u : tu2 : u3 ]. Sea P = [0 : 0 : 1 : 0] y ϕ : (P3 − P ) −→ P2
la proyección sobre el hiperplano z = 0, definida por ϕ([a0 : a1 : a2 : a3 ]) = [a0 : a1 : a3 ] (notemos
que P ∈
/ Y ).
ψ
ϕ
A continuación, consideremos los morfismos P1 −→ (P3 − P ) −→ P2 , esta composición es la proyección de la cúbica torcida desde un punto que no pertenece a ella, por lo que obtenemos una curva
en P2 . De manera precı́sa, la composición ϕ ◦ ψ : P1 −→ P2 está dada por [t : u] 7→ [t3 : t2 u : u3 ].
Si utilizamos x, y y z como coordenadas homogéneas de P2 , nos resulta una curva cuya ecuación es
y 3 − x2 z (Véase el Ejemplo 3.17).
Proposición 3.13. Sea X ⊂ Pn una variedad cuasi-proyectiva y ψ : X −→ Pm un morfismo.
Entonces ψ esta representado por una clase de equivalencia ψ = (f0 , . . . , fn ), donde (f0 , . . . , fn ) ∼
(g0 , . . . , gn ) si, y solo si, ∀ 0 ≤ i, j ≤ n : fi gj = fj gi en X, siendo los fi polinomios homogéneos
del mismo grado, tales que para todo x ∈ X exista un representante (f1 , . . . , fn ) de ψ tal que
fi (x) 6= 0 para al menos un i ∈ {0, . . . n}.
Demostración. Sea ψ : X −→ Pm como en el enunciado de la proposición, y consideremos
m
−1
{Ui }m
i=0 la cubierta abierta canónica de P . Definimos Vi := ψ (Ui ), tenemos que ∪i Vi = X y
ψ(Vi ) ⊆ Ui , ası́, por (3.11), tenemos que la familia de funciones ψi : Vi −→ Ui ∼
= Am son de
hecho morfismos. Tomemos x ∈ X de manera que ψ(x) ∈ Ui , entonces x ∈ Vi y como ψi es
regular en Vi , entonces es regular en x, por lo que existe una vecindad W de x tal que ψi =
(fi0 /gi0 , . . . , f(i−1)0 /g(i−1)0 , f(i+1)0 /g(i+1)0 , . . . , fim /gim ) en W , donde los polinomios fij , gij son
homogéneos del mismo grado y gij (x) 6= 0. Eligiendo un denominador común gi , tenemos que
ψi = (fi0 /gi , . . . , f(i−1)0 /gi , f(i+1)0 /gi , . . . , fim /gi ), donde gi , f1 , . . . , fm son polinomios homogéneos
del mismo grado con gi (x) 6= 0. En otras palabras,
ψ(x) = [f0 (x) : · · · : fi−1 (x) : gi (x) : fi+1 (x) : · · · : fn (x)] ∈ Pm .
Nuevamente tenemos que dos representaciones f (x) = (f0 , . . . , fm ) y g(x) = (g0 , . . . , gm ) definen el
mismo mapeo si, y solo si ∀ 0 ≤ i, j ≤ n : fi gj = fj gi en X.
∗
Utilizando esta caracterización de los morfismos, podemos dar más ejemplos interesantes.
3.13 Ejemplo (La inmersión d-ésima de Veronese): Con este resultado podemos probar que
la inmersión d-ésima de Veronese es un isomorfismo de Pn sobre su imagen ρd (Pn ) ⊆ PN . Para ello
n
n
describiremos de manera local el morfismo inverso ρ−1
d : ρd (P ) −→ P . Utilizando la notación que
desarrollamos en la Sección 2.4, ası́, sea {Wi }ni=0 la cubierta abierta de Im ρd (Pn ), y sea {Ui } la
cubierta abierta canónica de Pn . Entonces tenemos que ρd (Ui ) ⊂ Vi y ρ−1
d (Vi ) = Ui .
65
3.3. Morfismos entre Espacios Proyectivos
3. Morfismos
A continuación definimos el mapeo ψi : Wi −→ Pn dado por
c = [: · · · : ci0 ···:in : · · · ] 7→ [c1,0,...,d−1,0 : c0,1,0,...,d−1,...,0 : · · · : c0,...,d−1,...,1,0 : c0,...,d−1,...,0,1 ].
Esto es, enviamos a c ∈ Wi al n + 1-tuple de sus coordenadas que está indexado por los monomios
x0 xd−1
, . . . , xn xd−1
. Esta familia de mapeos coincide en las intersecciones Wi ∩ Wj , ası́ que podemos
i
i
pegarlos para formar un morfismo ψ : Im ρd (Pn ) −→ Pn . Es fácil ver que las correspondientes
composiciones originan los morfismos identidad.
3.14 Ejemplo: El anillo coordenado homogéneo de una variedad proyectiva no es invariante bajo
isomorfismo. Por ejemplo, sea X = P1 , y sea Y la 2-ésima inmersión de Veronese de P1 en P2 .
Entonces X ∼
= Y , pero S(X) no es isomorfo a S(Y ).
Para ver esto, tenemos que S(X) = S(P1 ) = k[x0 , x1 ]. La 2-ésima inmersión de Veronese envı́a el
2
2
2
2
2 2
punto [a : b] al punto
2 [a :ab : b ]. Ası́, Y = {[1, t, t ] |2t ∈ k} ∪ {[0 : 0 : 1]}. Como (ab) = a b , se
tiene que I(Y ) = y − xz , y S(Y ) = k[x0 , x1 , x2 ]/ y − xz .
A continuación, veremos que S(X) no es isomorfo a S(Y ). Para esto, observamos que son necesarios por lo menos 3 elementos para generar a S(Y ) como k-álgebra. Cualquier homomorfismo
f : S(X) −→ S(Y ) está definido por las imágenes de los generadores x0 , x1 de S(X) (como k-álgebra), sin embargo, como no tenemos el numero suficiente de variables, no existe un homomorfismo
suprayectivo de S(X) en S(Y ) y, por lo tanto, dichos anillos no pueden ser isomorfos.
3.15 Ejemplo: Si H ⊆ Pn es cualquier hipersuperficie. Mostrar que Pn − H es una variedad afı́n
(i.e., isomorfa a una variedad afı́n).
Sea f ∈ k[x0 , . . . , xn ] un polinomio homogéneo irreducible de grado d > 0 (ver Ejemplo
2.6) tal que
P
H = Z(f ). Sabemos que los monomios M0 , . . . , MN de la forma xi00 · · · xinn , con nk=0 ik = d donde
− 1, forman una base del k-espacio vectorial de los polinomios de grado d en las n + 1
N = n+d
n
P −1
c ∈ k. A continuación,
variables x0 , . . . , xn Sd , ya que f ∈ Sd , se tiene que f = N
i=0 ci Mi , con
Pi
consideraremos la d-ésima inmersión de Veronese de Pn en PN ρd . Sea g = N
i=0 ci xi ∈ k[x0 , . . . , xN ]
0
n
y sea H = Z(g), entonces, vemos que dado P ∈ P , P ∈ H = Z(f ) si, y solo si, ρd (P ) ∈ H 0 = Z(g),
de esta observación se sigue que ρd (H) = ρd (Pn ) ∩ H 0 .
Ası́, vemos que ρd envı́a H en H 0 de manera biyectiva. Por lo tanto, se tiene que ρd (Pn − H) =
ρd (Pn ) ∩ (PN − H 0 ). Por el Ejemplo 3.13 , ρd es un isomorfismo de Pn sobre su imagen y, por lo
tanto, ρd es un isomorfismo de Pn − H sobre ρd (Pn ) ∩ (PN − H 0 ).
Por la Sección 2.4, ρd (Pn ) = Z(a) es una variedad proyectiva en PN y por lo tanto es un subconjunto
algebraico cerrado en PN . Ası́, ρd (Pn ) ∩ (PN − H 0 ) es un subconjunto cerrado en PN − H 0 . Pero
PN − H 0 ∼
= AN , por lo que ρd (Pn ) ∩ (PN − H 0 ) es isomorfo a su imagen en AN , la cual es un
subconjunto cerrado. Por lo tanto, Pn − H es isomorfo a una variedad afı́n, y por lo tanto es afı́n.
3.16 Ejemplo: Si Y ⊆ Pn es una variedad proyectiva con dim Y ≥ 1 y H es una hipersuperficie,
entonces Y ∩ H 6= ∅.
Tomemos Y ⊆ Pn una variedad de dimensión positiva, y supongamos que existe una hipersuperficie
H tal que Y ∩ H = ∅, entonces Y ⊆ (Pn − H), pero Pn − H es afı́n por el Ejemplo 3.15. Por lo tanto,
Y ∼
= X = (Y ∩ (Pn − H)), donde X es una variedad afı́n, ası́ que consta de un solo punto, luego
dim Y = 0, lo cual es una contradicción. Por lo tanto concluimos que para toda hipersuperficie H
se tiene que Y ∩ H 6= ∅.
3.17 Ejemplo (Equivalencia Proyectiva de variedades): Antes del siguiente ejemplo necesitamos introducir la noción de equivalencia proyectiva. Sea A ∈ GLn+1 (k), sabemos que induce un
66
3.4. Productos de Variedades
3. Morfismos
homomorfismo lineal A : k n+1 −→ k n+1 que envı́a subespacios de k n+1 en subespacios de la misma dimensión y, al restringirnos a los subespacios de dimensión 1, vemos que A induce un mapeo
A : Pn −→ Pn (de hecho, A ∈ Aut Pn ). Llamamos a este mapeo una colineación. Es fácil ver que si
V = Z(f1 , . . . , fm ) ⊆ Pn es una variedad proyectiva y Γ ∈ GLn+1 (k), entonces al definir gi = fi ◦Γ−1
se tiene que Γ(V ) = Z(g1 , . . . , gm ), por lo que Γ(V ) es una variedad proyectiva. Decimos que V y
Γ(V ) son proyectivamente equivalentes.
Supongamos que char k 6= 2, sea f (x0 , x1 , x2 ) = ax20 + bx21 + cx22 + dx0 x1 + ex0 x2 + f x1 x2 cualquier
polinomio de grado 2, entonces podemos ver a f como la forma cuadrática inducida por una forma
bilineal simétrica A, a saber:
a d2 2e
x
f (x0 , x1 , x2 ) = (x0 , x1 , x2 ) d2 b f2 y ,
f
e
z
c
2
2
y como sabemos del Álgebra Lineal básica, cualquier matriz simétrica es diagonalizable, por lo
que existe una matriz inversible P tal que D = P t AP , donde D = diag {c0 , c1 , c2 }. Ası́ Z(f ) es
proyectivamente equivalente a la cúadrica definida por una ecuación de la forma
c0 x20 + c1 x21 + c2 x22 = 0,
donde los c0 , c1 , c2 ∈ k no son todos cero. Por último, como k es algebraicamente cerrado, entonces
∀ i ∈ {0, . . . , 2} ∃ bi ∈ k : b2i = ci , entonces después de aplicar una nueva colineación tal que
ci xi 7→ bi xi , se sigue que, después de una colineación adecuada, toda cónica en P2 es equivalente a
una de las siguientes:
x20 , x20 + x21 , x20 + x21 + x22 .
De lo anterior podemos demostrar ahora que cualquier cónica en P2 es isomorfa a P1 .
a) Caso x20 = 0. Como k es un campo, tenemos que x2 = 0 ⇔ x = 0, ası́, aquı́ la cuádrica está dada
por el hiperplano al infinito del plano afı́n x0 = 1, el cual, como sabemos, es isomorfo a P1
(Sección 2.3).
b) Caso x20 +x21 = 0. Este polinomio no es irreducible, pues tenemos que x20 +x21 = (x0 +ix1 )(x0 −ix1 ),
donde i es una raı́z cuadrada de 1. Representa la unión de dos lı́neas rectas.
c) Caso x20 + x21 + x22 = 0. Tenemos que está última ecuación es proyectivamente equivalente a la
cuádrica definida por la ecuación xy − z 2 , y del Ejemplo 2.7 y del Ejemplo 3.13, se sigue que P1
es isomorfo a Z(xy − z 2 ), que es la 2-ésima inmersión de Veronese de P1 .
3.4.– Productos de Variedades
A continuación estudiaremos los productos en la categorı́a de las variedades algebraicas. Vistas
como conjuntos de puntos, la forma más natural de definir esto es vı́a el producto cartesiano, y
veremos que en realidad éste es el enfoque correcto; lo que es difı́cil de justificar es el por que
seguimos conservando una estructura de variedad en el producto cartesiano de variedades.
Sean V ⊆ An y W ⊆ Am variedades afines con p = I(V ) y q = I(W ), para abreviar notación,
tomaremos X = {x1 , . . . , xn } y Y = {y1 , . . . , ym }, entonces k[X, Y ] = k[x1 , . . . , xn , y1 , . . . , ym ], e
identificaremos los puntos de An+m como parejas ordenadas de puntos (x, y), con x ∈ An y y ∈ Am .
A continuación, sea P ⊆ k[X, Y ] el ideal asociado a V × W ⊆ An+m . Entonces P es un ideal primo
y V × W es una variedad afı́n.
67
3.4. Productos de Variedades
3. Morfismos
Para ver esto, sean f (X, Y ), g(X, Y ) tales que f (X, Y )g(X, Y ) ∈ P, i.e., ∀ (a, b) ∈ V ×
W : f (a, b)g(a, b) = 0. Debemos mostrar que f ∈ P o g ∈ P. Consideremos los ideales a =
h{f (X, y) | y ∈ W }i y b = h{g(X, y) | y ∈ W }i, tenemos que a, b ⊆ k[ x ]. Afirmamos que ab ⊆ p. Si
esto no ocurre, entonces existen (a1 , . . . , an ) = a ∈ V , (b1 , . . . , bm ) = b, (b01 , . . . , b0m ) = b0 ∈ W tales
que f (a, b)g(a, b0 ) 6= 0. Entonces, necesariamente f (a, b) 6= 0, y por lo tanto f (a, Y ) ∈
/ q. Pero, por
hipótesis, f (a, Y )g(a, Y ) se anula en W , por lo tanto g(a, Y ) ∈ q, pero esto implica que g(a, b0 ) = 0,
lo cual es una contradicción.
Por lo tanto, hemos probado ab ⊆ p, y como p es primo, se tiene a ⊆ p o b ⊂ p. Supongamos
que a ⊆ p entonces ∀ (a1 , . . . , an ) = a ∈ V , ∀ (b1 , . . . , bm ) = b ∈ W , tenemos que f (a, b) = 0, por lo
que f se anula en V × W y por lo tanto f ∈ P. En caso de que b ⊆ p, se concluye que g ∈ P. Por
lo tanto P es primo y V × W es una variedad afı́n.
La variedad afı́n V × W se conoce como el producto de V y W . Notemos que su topologı́a no
es en general la topologı́a producto (Ver Ejemplo 1.2).
Probemos a continuación que I(V × W ) = hI(V ), I(W )i = Ω. Tomemos (x, y) ∈ V × W y sea
f ∈ Ω, ası́ f (x, y) = 0 y V × W ⊆ Z(Ω). Recı́procamente sea (x, y) ∈ Z(Ω), entonces, si vemos
a I(V ) como un ideal en k[X, Y ] y dado f ∈ I(V ) definimos f (x, y) := f (x), de esta manera
vemos que (x, y) ∈ Z(I(V )), pero como I(V ) no depende del conjunto de variables Y , entonces
x ∈ Z(I(V )) = V . Análogamente se demuestra que y ∈ Z(I(W )), por lo tanto, tenemos que
(x, y) ∈ V × W , luego V × W ⊇ Z(Ω), y al juntar ambas inclusiones tenemos que V × W = Z(Ω).
Ya vimos que V × W es una variedad algebraica, por lo que Ω debe ser un ideal primo. Concluimos
que I(V × W ) = I(Z(Ω)) = Ω, como se querı́a demostrar.
Para la siguiente discusión será necesario conocer algunos hechos básicos sobre productos tensoriales (ver el Apéndice A).
Proposición 3.14. Sea I un ideal de k[X] y J un ideal de k[Y ]. Entonces
k[X, Y ]/ hI, Ji ∼
= k[X]/I ⊗k k[Y ]/J.
Demostración. Denotamos por I e la extensión del ideal I en k[X, Y ] (ver [AM69], página 9).
Utilizando que k[X, Y ] es un k[X]-módulo, y que k[X, Y ]I = I e , tenemos que
k[X, Y ]/I e ∼
= k[X]/I ⊗k[X] k[X, Y ] ∼
= k[X]/I ⊗k[X] (k[X] ⊗k k[Y ]) ∼
=
∼
= (k[X]/I ⊗k[X] k[X]) ⊗k k[Y ] ∼
= k[X]/I ⊗k k[Y ].
Tomando ahora como base el anillo k[Y ] y tensorizando con k[Y ]/J, del lado derecho tenemos que
(k[X]/I ⊗k k[Y ]) ⊗k[Y ] k[Y ]/J ∼
= k[X]/I ⊗k (k[Y ] ⊗k[Y ] k[Y ]/J) ∼
= k[X]/I ⊗k k[Y ]/J.
Y del lado izquierdo obtenemos
(k[X, Y ]/I e ) ∼
k[X, Y ]/I e ⊗k[Y ] k[Y ]/J ∼
= k[X, Y ]/(I e + J e ).
=
Je
Pero tenemos que (I e + J e ) = (I + J)e .
∗
α Teorema 3.15. Sea k un campo algebraicamente cerrado y sean A, B dominios enteros finitamente generados sobre k, entonces A ⊗k B es también un dominio entero.
68
3.4. Productos de Variedades
3. Morfismos
∗
Demostración. Ver [ZS58] Capı́tulo III, Sección 15, Volumen I.
Proposición 3.16. Sean V ⊆ An , W ⊆ Am dos variedades afines. Entonces A(V × W ) ∼
=
A(V ) ⊗k A(W )
Demostración. Ya vimos que I(V × W ) = hI(V ), I(W )i, ası́ por 3.14
A(V × W ) = k[X, Y ]/ hI(V ), I(W )i ∼
= k[X]/I(V ) ⊗k k[Y ]/I(W ) = A(V ) ⊗k A(W ).
∗
A continuación veremos que V × W es un producto en la categorı́a de las variedades algebraicas.
Notemos primero que existen inmersiones canónicas de k-álgebras i1 : A(V ) ,→ A(V ) ⊗k A(W ) y
i2 : A(W ) ,→ A(V ) ⊗k A(W ) dadas por i1 (X) := x ⊗ 1 y i2 (y) := 1 ⊗ y. Ya que tanto V , W y V × W
son variedades afines, estas inmersiones inducen los morfismos de variedades π1 : V × W −→ V y
π2 : V × W −→ W dados por π1 (x, y) = x · 1 y π2 (x, y) = 1 · x, y con esto demostramos que las
proyecciones π1 y π2 son morfismos de variedades afines.
Tomemos ahora sea Z una variedad y sean ϕ1 : Z −→ V , ϕ2 : Z −→ W morfismos de variedades,
entonces por existen β1 : A(V ) −→ A(Z) y β2 : A(W ) −→ A(Z) morfismos de k-álgebras. Definimos
ψ : A(V ) × A(W ) −→ A(Z) dado por ψ(f, g) := β1 (f )β2 (g), la cual es una función bilineal. Por la
∼
propiedad que define el producto tensorial, existe un único morfismo ψ : A(V ) ⊗k A(W ) −→ A(Z)
tal que el siguiente diagrama conmuta:
i1 ⊗i2
/ A(V ) ⊗k A(W )
RRR
RRR
∼
RRR
ψ
ψ RRRRR
(
A(V ) × A(W )
A(Z)
∼
En particular, tenemos que ∀ x ∈ A(V ) : ψ(x ⊗ 1) = ψ(x, 1) = β1 (x)β2 (1) = β1 (x) y de manera
∼
∼
∼
similar, ∀ y ∈ A(W ) : ψ(1 ⊗ y) = β2 (y), esto es ψ ◦ i1 = β1 y ψ ◦ i2 = β2 . Esto da origen a un
mapeo único (por la propiedad universal del producto tensorial) ξ : Z −→ X × Y y a dos diagramas
conmutativos
π1
π2
/V
/
V ×O W
V ×O W
;w
:W
ξ
Z
ww
ww
w
ww ψ1
ww
ξ
Z
v
vv
vv
v
vv ψ2
vv
Al juntarlos obtenemos la conclusión de que X × Y es un producto categórico.
V ×O WH
HH π
w
HH 2
ww
w
HH
ξ
w
HH
ww π1
w
$
{w
ϕ2
o
/W
V
Z
ϕ1
Proposición 3.17. Si X y Y son dos variedades afines, entonces dim X × Y = dim X + dim Y
Demostración. Utilizando el hecho de que los productos tensoriales de dominios enteros finitamente generados sobre campos algebraicamente cerrados vuelven a ser dominios enteros, es fácil
hallar una cadena de ideales primos que tenga longitud dim X + dim Y y que termine con el ideal
69
3.4. Productos de Variedades
3. Morfismos
I(X) + I(Y ). Primero construimos una cadena de longitud dim X al considerar ideales primos en
el anillo k[x1 , . . . , xn , y1 , . . . , ym ] de la forma p + I(Y ), donde p es un ideal primo en k[x1 , . . . , xn ]
tal que I(X) ( p. Terminaremos esta cadena en un ideal primo de la forma mP + I(Y ), donde mP
es maximal en k[x1 , . . . , xn ] y P ∈ X. Continuamos ahora este ideal primo con ideales primos de la
forma mP + q, donde q es un ideal primo en k[y1 , . . . , ym ] y I(Y ) ( q.
∗
En este momento utilizaremos la inmersión de Segre ψ para dar una definición de productos de
variedades proyectivas y cuasi-proyectivas. Identificamos al producto Pn × Pm con su imagen en PN
via la inmersión de Segre para darle una estructura de variedad proyectiva. A continuación para
cualesquiera dos variedades cuasi-proyectivas X ⊆ Pn y Y ⊆ Pm consideramos X × Y ⊆ Pn × Pm .
Proposición 3.18. Sean S1 = k[x0 , . . . , xn ], S2 = k[y0 , . . . , yn ] y S3 = k[{zij | 0 ≤ i ≤ n, 0 ≤
j ≤ m}] los anillos coordenados homogéneos de Pn , Pm y PN respectivamente, y sean An ∼
= Ui =
m − Z(y ) y AN ∼ W = PN − Z(z ). Entonces
Pn − Z(xi ), Am ∼
V
=
P
= j
= ij
j
ij
\
ψ(Ui × Vj ) = Wij
ψ(Pn × Pm ).
Demostración. Sean α = [a0 : · · · : ai−1 : 1 : ai+1 · · · : an ], β = [b0 : · · · : bj−1 : 1 : bj+1 · · · : bn ].
Entonces tenemos que si ψ(α, β) = [· · · : c`k : · · · ], entonces cij = 1 y ψ(α, β) ∈ Wij , luego
ψ(Ui × Vj ) ⊆ Wij ∩ ψ(Pn × Pm ).
Recı́procamente, sea γ = [· · · : c`k : · · · ] ∈ Wij ∩ ψ(Pn × Pm ), entonces tenemos que ∃ α = [a0 :
· · · : an ] ∈ Pn , β = [b0 : · · · : bm ] ∈ Pm : ψ(α, β) = γ. En particular se tiene que ai bj = cij 6= 0,
por lo que ai 6= 0 y bj 6= 0, ası́ α ∈ Ui y V ∈ Vj , y tenemos que ψ(Ui × Vj ) ⊇ Wij ∩ ψ(Pn × Pm ), de
donde se sigue la igualdad.
∗
Por el resultado anterior, ya que An+m ∼
= Ui × Vj , tenemos un isomorfismo ψ(An+m ) ∼
= Wij ∩
n
m
ψ(P × P ). Utilizaremos este isomorfismo junto con los resultados obtenidos previamente para
productos de variedades afines para probar algunos hechos que tienen propiedades locales.
Por ejemplo, podemos probar que si X es irreducible en Pn y Y es irreducible en Pm , entonces
X × Y es irreducible. También podemos probar de esta manera que si X y Y son cerradas, entonces
ψ(X × Y ) también es cerrada, para lo cual es suficiente probar que las componentes afines son
cerradas, y esto se sigue de la discusión anterior para variedades afines. La parte más difı́cil es
probar que todas estas imágenes son realmente productos categóricos. Para hacer esto de una manera
económica, tenemos que por la Observación 3.2, toda variedad es cuasi-proyectiva. Ası́, para probar
que X × Y es un producto en la categorı́a de las variedades, es suficiente con suponer que X ⊆ Pn
y X ⊆ Pm son variedades cuasi-proyectivas, y dada Z ⊆ Pr cualquier variedad cuasi-proyectiva, tal
que se tenga:
y
X × YG
Z@
X
~~
~~
~
~~~ f
@@ g
@@
@@
Y
X
w
ww
wwπ
w
w 1
w{ w
GG π
GG 2
GG
GG
#
Y
y queremos construir un morfismo f × g : Z −→ X × Y tal que ∀ z ∈ Z : π1 (f × g)(z) =
f (z), π2 (f × g)(z) = g(z). Es suficiente hacerlo localmente, i.e., en cada pieza abierta de Z y X × Y
que estén contenidas en la cubierta abierta mencionada arriba. Esto es un trabajo tedioso, más no
difı́cil.
3.18 Ejemplo (Grupos Algebraicos): Un grupo algebraico (también conocidos como variedades grupo) consiste de una variedad Y junto con un morfismo µ : Y × Y −→ Y tal que el conjunto
de puntos de Y junto con la operación dada por µ es un grupo, y tal que el mapeo inverso y 7→ y −1
es también un morfismo de Y a Y .
70
3.4. Productos de Variedades
3. Morfismos
a) El grupo aditivo Ga está dado por la variedad A1 y el morfismo µ : A2 −→ A1 definido por
µ(a, b) = a + b. Mostrar que es un grupo algebraico.
Para ver que (A1 , µ) es un grupo, no es necesario considerarlo como espacio topológico, en
cuyo caso, tomamos el conjunto subyacente k y vemos que µ define la misma operación que
la operación adición en k, por lo que (A1 , µ) es un grupo aditivo (y abeliano). A continuación
veamos la continuidad de µ, para lo cual nuevamente es suficiente considerar µ−1 ({a}), a ∈ k.
Tenemos que µ−1 ({a}) = {(b, c) ∈ A2 | b + c = a} = Z(x + y − a), el cual es un conjunto cerrado.
Por lo tanto, µ es continua. Por tenemos que O(A1 × A1 ) ∼
= A(A1 × A1 ) ∼
= k[ x ] ⊗k k[y] ∼
= k[x, y],
1
1
y ası́ tenemos que x ◦ µ = x + y ∈ O(A × A ), por lo tanto, µ es un morfismo.
Por último, es evidente que el mapeo ψ : A1 −→ A1 dado por a 7→ −a es un morfismo, pues si x
es la función coordenada en A1 , se tiene x ◦ ψ = −x ∈ k[ x ] = O(A1 ), por lo tanto, por, ψ es un
morfismo. De esta manera Ga es un grupo algebraico.
b) El grupo multiplicativo Gm está dado por la variedad A1 − {0} y el morfismo µ(a, b) = ab.
Mostrar que es una variedad grupo. Nuevamente, (A1 − {0}, µ) no es más que el grupo multiplicativo (k − {0}, ·). Tenemos que ∀ a ∈ (A1 − {0}) : µ−1 ({a}) = {(b, c) ∈ A2 | bc = a} =
Z(xy − a). Por lo tanto, µ es continua. Además se tiene que como (A1 − {0})2 ⊂ A2 , entonces
k[x, y] ⊆ O((A1 − {0})2 ), de donde se sigue que µ es un morfismo.
Por último, es evidente que el mapeo ψ : A1 −{0} −→ A1 −{0} dado por a 7→ a−1 es un morfismo,
pues si x es la función coordenada en A1 , se tiene x ◦ ψ = x−1 ∈ k[x, x−1 ] = O(A1 − {0}), por
lo tanto, por, ψ es un morfismo. Se sigue que Ga es un grupo algebraico.
Es fácil ver que si (G, µ, e) es una variedad grupo y X es cualquier variedad, entonces Hom (X, G)
hereda una estructura natural de grupo bajo la operación ∗ : Hom (X, G) × Hom (X, G) −→
Hom (X, G) dada por (f ∗ g)(x) := µ(f (x), g(x)). Dicha operación es asociativa a fortiori. Definimos la función ε : X −→ G definida por x 7→ e, y queremos ver que ε ∈ Hom (X, G). Sea U ⊆ G
cualquier conjunto abierto, entonces ε−1 (U ) = ∅ si e 6= U y ε−1 (U ) = X si e ∈ U , por lo tanto
ε es continua. A continuación consideremos un conjunto abierto U en G de manera que e ∈ U y
sea λ ∈ O(U ), con λ(e) = α ∈ k, entonces tenemos que λ ◦ ε es la función constante α, por lo
que está en O(X), luego, ε ∈ Hom(X, G) juega el papel de ı́dentidad bilátera, pues
(f ∗ ε)(x) = µ(f (x), ε(x)) = µ(f (x), e) = f (x),
(ε ∗ f )(x) = µ(ε(x), f (x)) = µ(e, f (x)) = f (x).
Tenemos que Hom(X, Gm ) = Hom(k[x, x−1 ], O(X)). Dado f ∈ Hom(k[x, x−1 ], O(X)), entonces
f (x) ∈ O(X)∗ (el grupo de unidades de O(X) bajo la multiplicación), pues 1 = f (1) = f (xx−1 ) =
f (x)f (x−1 ), por lo tanto, podemos definir la aplicación Ψ : Homk[x, x−1 ], O(X)) −→ O(X)∗
dada por f 7→ f (x). Verifiquemos en primera instancia que es un homomorfismo, Ψ(f g) =
(f g)(x) = f (x)g(x) = Ψ(f )Ψ(g). Es claro que es un monomorfismo, ası́ que verifiquemos que
es un epimorfismo, dado α ∈ O(X)∗ , podemos definir un homomorfismo de k-álgebras g :
k[x, x−1 ] −→ O(X) dado por x 7→ α, x−1 7→ α−1 y g|k = idk , por lo que se tiene que Ψ(g) = α.
Concluimos que Ψ es un isomorfismo de grupos, y ası́ podemos definir un funtor representable
Hom(−, Ga ) que va de las categorı́as de las variedades a la categorı́a de los grupos.
c) GLn (k) es un grupo algebraico. Nos adelantaremos un poco a lo que sigue para dar este ejemplo
concreto de un grupo algebraico muy importante. En el Capı́tulo 4 (Lema 4.2) veremos que
el complemento de una hipersuperficie Y en An es isomorfo a una hipersuperficie en An+1 . El
conjunto GLn (k) de las matrices n × n que son invertibles sobre k no es más que el complemento
2
en An de la hipersuperficie D := Z(Det), y con todo derecho lo podemos considerar como una
71
3.5. Variedades Normales
3. Morfismos
variedad afı́n. Claramente el mapeo multiplicación · : GLn (k) × GLn (k) −→ GLn (k) es regular;
de la regla de Cramer se sigue que el mapeo A 7→ A−1 para A = (aij ) ∈ GLn (k) es regular, pues
i+j
(a)−1
Det Mji /Det A
ij = (−1)
donde Mji es la submatriz de A obtenida al eliminar la j-ésima fila y la i-ésima columna.
Por último, el subconjunto SLn (k) de GLn (k) es una subvariedad, la cual es cerrada bajo las
operaciones de grupo, por lo que es un subgrupo algebraico.
3.5.– Variedades Normales
Antes de entrar en esta discusión necesitaremos de algunos preliminares sobre extensiones enteras
de anillos (véase el Apéndice A).
Una variedad Y es normal en el punto P ∈ Y si OP es un anillo ı́ntegramente cerrado. Y es
normal si es normal en todo punto.
Observación 3.3: Usualmente se utiliza el término anillo normal para designar a un dominio
entero ı́ntegramente cerrado (i.e., ı́ntegramente cerrado en su campo de cocientes). Siguiendo la
advertencia dada en [Mat89], aquı́ utilizaremos el término de acuerdo a como lo concibieron Serre
y Grothendieck, es decir, un anillo A es normal si para todo ideal primo p, la localización Ap de A
en el ideal p es ı́ntegramente cerrada.
3.19 Ejemplo: Mostrar que la cúbica cuspidal y 2 = x3 (Ver la Figura 3.1) en A2 no es normal.
Sea Y = (y 2 −x3 ) y consideremos la función f := y/x ∈ K(Y ), entonces el elemento f es entero sobre
O0 pues f 2 = y 2 /x2 = x3 /x2 = x, luego, f es raı́z del polinomio mónico P (T ) := T 2 − x ∈ O0 [T ],
sin embargo, f ∈
/ O0 y O0 no es ı́ntegramente cerrado, por lo que Y no es normal.
Proposición 3.19. Si Y es afı́n, entonces Y es normal si, y solo si, A(Y ) es ı́ntegramente cerrado.
Demostración. Supongamos que Y es normal y tomemos P ∈ Y . Probaremos que OP es ı́ntegramente cerrado. Sabemos que coc OP = K(Y ), ası́, sea α ∈ K(Y ) entero sobre OP , entonces existe
n ∈ N tal que
αn + a1 αn−1 + · · · + an = 0,
donde ai ∈ OP , por lo que ai = bi /ci , bi , ci ∈ A(Y ), ci (P ) 6= 0. A continuación hacemos d0 = c1 · · · cn
y multiplicando la relación anterior, obtenemos que
d0 αn + d1 αn−1 + · · · + dn = 0,
donde di ∈ A(Y ), y d0 (P ) 6= 0. Multiplicando la ecuación anterior por d0n−1 y haciendo β = d0 α,
obtenemos β n + d1 β n−1 + d2 d0 β n−2 + · · · + dn d0n−1 = 0, lo cual implica que β es entero sobre A(Y ).
Por hipótesis, A(Y ) es ı́ntegramente cerrado, por lo que d0 α = β ∈ A(Y ). Entonces α = β/d0 ∈ OP ,
ya que d0 (P ) 6= 0.
Supongamos ahora que todos los anillos locales OP son ı́ntegramente cerrados. Mostraremos que
A(Y ) es ı́ntegramente cerrado. Sea α ∈ K(Y ) entero sobre A(Y ), entonces existe n ∈ N tal que
αn + a1 αn−1 + · · · + an = 0, donde ai ∈ A(Y ). Pero entonces ∀ P ∈ Y : ai ∈ OP , ∀ i ∈ {1, . . . , n},
pero, por hipótesis, todos estos anillos son ı́ntegramente cerrados, por lo que ∀ P ∈ Y : α ∈ OP .
Por último, notamos que
\
α∈
OP = A(Y ).
P ∈Y
Esto demuestra que A(Y ) es ı́ntegramente cerrado.
72
∗
3.5. Variedades Normales
3. Morfismos
De hecho, para dominios enteros D, la propiedad de ser ı́ntegramente cerrado es una propiedad
local, i.e., D es ı́ntegramente cerrado si, y solo si, para todo ideal primo p de D (respectivamente
para todo ideal maximal m), Dp (respectivamente Dm ) es ı́ntegramente cerrado. Ver [AM69], Cap.
5 Proposición 5.13.
3.20 Ejemplo: An es normal. Para ver esto, basta ver que A = k[x1 , . . . , kn ] es ı́ntegramente
cerrado. Se tiene que A es un DFU (ver [Hun74], página 164), ası́, sea α ∈ k(x1 , . . . , xn ) = coc A
un elemento entero sobre A, entonces podemos suponer que existen p, q ∈ A con gcd(p, q) = 1 tales
que α = p/q. Supongamos a continuación que α satisface la ecuación
αn + an−1 αn−1 + · · · + a0 = 0, ∀ i ∈ {0, . . . , n − 1} : ai ∈ A.
Obtenemos ası́ que pn + an−1 pn−1 q + · · · + a0 q n = 0. Sea π ∈ A un factor primo de q, entonces
tenemos que π | pn y por lo tanto π | p, pero esto contradice el hecho de que gcd(p, q) = 1.
Concluimos ası́ que ningún primo divide a q, por lo que q debe ser una unidad, lo cual implica que
α = pq −1 ∈ A. En consecuencia A es ı́ntegramente cerrado y An es normal.
Para probar nuestro próximo resultado, necesitaremos del siguiente teorema.
α Teorema 3.20 (Finitud de la Cerradura Entera). Sea A un dominio entero, el cual es
una algebra finitamente generada sobre un campo k. sea K el campo de cocientes de A y L una
extensión algebraica finita de K. Entonces la cerradura entera A0 de A en L es un A-módulo
finitamente generado, y es también una k-álgebra finitamente generada
∗
Demostración. Ver [ZS58], Vol. 1, Cap V, Teorema 9, página 267.
Definición: Decimos que un morfismo ψ : X −→ Y es dominante si ψ(X) es denso en Y .
Proposición 3.21. Sea ϕ : X −→ Y un morfismo. Entonces α(ϕ) : A(Y ) ,→ A(X), i.e., α(ϕ)
es un monomorfismo de k-álgebras si, y solo si, ϕ es dominante
Demostración. Sean ξ, ζ ∈ A(Y ) tales que α(ξ) = α(ζ), esto es, las funciones ξ ◦ ϕ, ζ ◦ ϕ ∈ A(X)
son iguales, lo cual implica que ∀ x ∈ X : ξ(ϕ(x)) = ζ(ϕ(x)), lo que nos dice que ξ = ζ en
ϕ(X) ⊂ Y , el cual, por hipótesis, es un subconjunto denso. Por continuidad, se sigue que ξ = ζ y
α(ϕ) es inyectiva.
A continuación, supongamos que α(ϕ) es inyectiva. Tomemos un polinomio g ∈ A y supongamos
que ϕ(X) ⊂ Y ∩ Z(g), que es un conjunto cerrado en Y . Sea g la clase de g en A(Y ) = O(Y ), ası́,
tenemos que (g ◦ ϕ)(X) = 0, lo que nos dice que α(ϕ)(g) = 0, i.e., g ∈ I(Y ), por lo tanto, Z(g) = Y .
Ahora tomemos un subconjunto cerrado
Tn arbitrario Ω de Y que contenga a ϕ(X), dicho conjunto
es de la forma Y ∩ Z(g1 , . . . , gn ) = i=1 (Y ∩ Z(gi )) para algunos g1 , . . . gn ∈ A. Se sigue que
∀ i : ϕ(X) ⊆ Y ∩ Z(gi ), y esto implica por lo visto anteriormente que ∀ i : gi ∈ I(Y ), luego Ω = Y
y ϕ(X) es denso en Y .
∗
∼
Teorema 3.22. Sea Y una variedad afı́n. Entonces existe una variedad normal Y y un morfismo
∼
π : Y −→ Y con la propiedad de que siempre que Z sea una variedad normal, y ϕ : Z −→ Y
∼
sea un morfismo dominante, entonces existe un único morfismo θ : Z −→ Y tal que el siguiente
diagrama es conmutativo:
∼
Y
π
o
θ
ϕ
Y
73
Z
3.5. Variedades Normales
3. Morfismos
∼
ϕ = π ◦ θ. Y se conoce como la normalización de Y .
Demostración. Para comenzar, notemos que como Y es una variedad algebraica, entonces A(Y )
es un dominio entero y es una k-álgebra finitamente generada. Consideremos Ω la cerradura entera
de A(Y ) en K(Y ). Sabemos que Ω es de hecho, un anillo ı́ntegramente cerrado. Más aún, como Ω ⊆
K(Y ), se sigue que Ω no tiene divisores de cero. La extensión de campos K(Y )/K(Y ) es algebraica
y finita, luego, por el Teorema (3.20), se sigue que Ω es una k-álgebra finitamente generada. Por el
∼
∼
∼ A(Y ), y ya que Ω no tiene
Ejemplo 1.8, tenemos que existe un conjunto algebraico Y tal que Ω =
∼
∼
divisores de cero, se sigue que I(Y ) es un ideal primo, por lo que Y es una variedad algebraica afı́n
normal (por construcción).
∼
∼
Ya que A(Y ) ,→ A(Y ), por (3.7) obtenemos un morfismo inducido π : Y −→ Y . Ahora sea Z
una variedad normal y ϕ : Z −→ Y un morfismo dominante, por 3.21 se tiene que A(Y ) ,→ A(Z).
∼
A continuación, dado u ∈ A(Y ), éste es entero sobre A(Y ) y está contenido en K(Y ), por la
Proposición 3.21, como A(Y ) ,→ A(Z), tenemos que K(Y ) ,→ K(Z), por lo tanto u ∈ K(Z). Ya
que A(Y ) ⊆ A(Z), necesariamente se tiene que u es entero sobre A(Z), y como Z es normal, A(Z)
∼
es ı́ntegramente cerrado y concluimos que u ∈ A(Z). Por lo tanto, tenemos que A(Y ) ⊆ A(Z), lo
∼
cual nos da un único morfismo θ : Z −→ Y , terminando ası́ la prueba.
74
∗
Capı́tulo 4
Mapeos racionales
En este capı́tulo discutiremos un concepto único en Geometrı́a Algebraica: funciones que
están definidas solamente en algún subconjunto abierto de una variedad. En la Sección 4.1
definimos los conceptos de mapeo racional y mapeo racional dominante entre variedades; el
segundo nos permitirá definir una nueva categorı́a (y por ende una nueva relación de igualdad: la equivalencia birracional) la cual es importante cuando se trata el problema de la clasificación de las variedades, el cual es un tópico central de estudio en Geometrı́a Algebraica.
En la Sección 4.2 (la más importante de este capı́tulo) hallaremos que toda variedad algebraica es localmente afı́n, en el sentido de que la topologı́a de Zariski de cualquier variedad posee una base que consta de subconjuntos abiertos que son isomorfos a conjuntos algebraicos afines. Descubriremos como al cambiar los morfismos de nuestra categorı́a
base obtenemos una nueva antiequivalencia de categorı́as, en este caso, entre la categorı́a
de las variedades algebraicas y los mapeos racionales con la categorı́a de las extensiones
k que son finitamente generadas y los morfismos de k-álgebras. Por último,
X
r+1
de dimensión r es birracionalmente equivalente a una hipersuperficie en P
(Teorema 4.7).
de campos de
aprovecharemos la noción de equivalencia birracional para demostrar que toda variedad
En la Sección 4.3 utilizamos las ideas desarrolladas para describir un ejemplo muy importante
de mapeo birracional: la explosión de una variedad en un punto, que es una herramienta necesaria en la resolución de singularidades (o puntos distinguidos) de las variedades algebraicas,
el cual es un concepto que ilustra muy bien la utilidad de las funciones racionales.
4.1.– Mapeos racionales y Equivalencia birracional
En esta sección introducimos las nociones de mapeo racional y de equivalencia birracional, las
cuales son útiles para la clasificación de variedades. Un mapeo racional es un morfismo que solo
está definido en algún subconjunto abierto. Como un subconjunto abierto es denso, este morfismo
lleva mucha información. En este aspecto la geometrı́a algebraica es más “rı́gida” que la geometrı́a
diferencial o la topologı́a. En particular, el concepto de equivalencia birracional es único para la
geometrı́a algebraica.
Lema 4.1. Sean X y Y variedades, sean ϕ, ψ dos morfismos de X a Y y suponga que existe un
subconjunto abierto no vacı́o U ⊂ X tal que ϕ|U = ψ|U . Entonces ϕ = ψ.
Demostración. Podemos suponer que Y ⊆ Pn para algún n ∈ N. Entonces al componer con el
morfismo de inclusión Y ,→ Pn se reduce al caso en que Y = Pn . Consideremos el producto Pn ×Pn , el
cual tiene estructura de variedad proyectiva garantizada por su inmersión de Segre (Ver Sección 3.4).
Los morfismos ϕ, ψ determinan un mapeo ϕ × ψ : X −→ Pn × Pn , el cual es de hecho un morfismo.
Sea ∆ = {(P, P ) | P ∈ Pn }, el cual está definido por las ecuaciones {xi yj = xj yi | i, j = 0, 1, . . . , n}
por lo que es un subconjunto cerrado de Pn × Pn . Por hipótesis (ϕ × ψ)(U ) ⊆ ∆. Pero U es denso
en X y ∆ es cerrado, por lo que ϕ × ψ(X) ⊆ ∆. Esto dice que ϕ = ψ.
∗
75
4.1. Mapeos racionales y Equivalencia birracional
4. Mapeos racionales
Sean U1 , U2 , U3 subconjuntos abiertos de X y para i ∈ {1, 2, 3} sea fi : Ui −→ Y un morfismo.
Supongamos que f1 = f2 en U1 ∩ U2 6= ∅ y que f2 = f3 en U2 ∩ U3 6= ∅, entonces tenemos que
f1 = f3 en el conjunto abierto U1 ∩ U2 ∩ U3 , el cual es un subconjunto abierto de U1 ∩ U3 , por el
Lema 4.1, se sigue que f1 = f3 en U1 ∩ U3 .
Hemos llegado a la definición de un mapeo racional de variedades, las cuales juegan un papel
similar a las funciones racionales en una variedad.
Definición: Sean X, Y variedades. Un mapeo racional ϕ : X −→ Y es una clase de equivalencia
de parejas hU, ϕU i donde U es un subconjunto abierto no vacı́o de X, ϕU es un morfismo de U a Y ,
y donde dos parejas hU, ϕU i,hV, ϕV i son equivalentes si ϕU = ϕV en U ∩ V . El mapeo racional ϕ es
dominante si para algún (y por ende para todo) par hU, ϕU i, la imagen de ϕU es un subconjunto
denso de Y .
Notemos que el mapeo racional ϕ : X −→ Y no es en general un mapeo del conjunto X al
conjunto Y . Por ello debemos ser muy cuidadosos cuando hablemos, por ejemplo, de la composición
de este tipo de funciones. Bien se puede presentar el caso de que la imagen de un mapeo racional
esté contenida en el conjunto en el cual el segundo mapeo racional no está definido.
Si f es un mapeo racional dominante, entonces lo podemos componer con cualquier otro mapeo
racional. Para ver esto, sea f : X −→ Y un mapeo racional dominante y sea g : Y −→ Z cualquier
mapeo racional. Si denotamos por V ⊆ Y al dominio de g y por W ⊆ X al dominio de f , entonces
f −1 (V ) es abierto en X y por lo tanto f −1 (V ) ∩ W 6= ∅. Sea U este conjunto abierto, y hacemos
g ◦ f : U −→ Z, el cual es un morfismo en U y por lo tanto define un mapeo racional de X a Z.
Observemos que si g también es dominante, entonces g◦f será dominante también. Para ver esto,
supongamos que existe C ⊆ Z un conjunto cerrado tal que (g ◦ f )(U ) ⊆ C, si hacemos D = g −1 (C),
entonces D ⊆ Y es cerrado y g(D) ⊆ C. Pero podemos suponer que f (U ) ⊆ D, por lo que f (U ) ⊆ D.
Como f es dominante, se debe tener que D = Y , y de esta manera g −1 (C) = Y , i.e., g(Y ) ⊆ C.
Pero g es dominante, por lo que el único conjunto cerrado que contiene a g(Y ) es Z. Por lo tanto
C = Z, que era lo que querı́amos demostrar.
Por lo tanto, ya que al componer dos mapeos racionales dominantes nos vuelve a dar un mapeo
racional dominante, podemos considerar nuevamente la clase de todas las variedades algebraicas
junto con los mapeos racionales dominantes que existen entre ellas. De esta manera hemos construido
una nueva categorı́a, donde los objetos son las variedades algebraicas y los morfismos son mapeos
racionales. Un “isomorfismo” en esta categorı́a se llama un mapeo birracional.
Definición: Un mapeo birracional ϕ : X −→ Y es un mapeo racional que admite una inversa, a
saber, un mapeo racional ψ : Y −→ X tales que ϕ ◦ ψ = idY y ψ ◦ ϕ = idX como mapeos racionales.
Si existe un mapeo birracional de X a Y , decimos que X y Y son equivalentes birracionalmente.
4.1 Ejemplo (Dominio de definición de una función racional): Si f, g son funciones regulares en conjuntos abiertos U y V de una variedad X y si f = g en U ∩ V , mostrar que la función
que es f en U y g en V es regular en U ∪V . Concluya que si f es una función racional en X, entonces
existe un conjunto maximal (con respecto a la inclusión) U de X en el que f está representada por
una función regular. Decimos que f está definida en los puntos de U .
Sea h la función descrita anteriormente. Podemos suponer que X es cuasi-proyectiva. Si P ∈ U con
P ∈
/ V , como f es regular y h|U = f , entonces existe una vecindad A de P en U tal que h|A =
f |A = α/β, con α, β ∈ S h polinomios homogéneos del mismo grado, tales que ∀ P ∈ A : β(P ) 6= 0.
Análogamente se trata el caso cuando P ∈ V con P ∈
/ U . Finalmente tomemos P ∈ U ∩ V , sean
AU , AV vecindades de P en U y V respectivamente tales que f |AU = α/β y g|AV = γ/δ, con
76
4.1. Mapeos racionales y Equivalencia birracional
4. Mapeos racionales
α, β, γ, δ ∈ S h polinomios homogéneos, con α, β del mismo grado, y también γ, δ del mismo grado,
tales que ∀ P ∈ AU : β(P ) 6= 0, ∀ P ∈ AV : δ(P ) 6= 0 y tomemos AU ∩ AV , la cual es una vecindad
de P en U y V , y como f = g en U ∩ V , se sigue que h = α/β = γ/δ en AU ∩ UV , por lo que
concluimos que h es regular en U ∪ V .
Para concluir, tomemos hU, f i ∈ K(X) una función racional, sabemos que hU, f i = {(Ui , fi )}i∈I ,
donde ∀ (i, j) ∈ I × I : fi = fj en Ui ∩ Uj . Tomemos V = ∪i∈I Ui y definimos la función h en V como:
si P ∈ Ui , entonces h(P ) = fi (P ), por el párrafo anterior, h es una función regular bien definida
en el subconjunto abierto V , además, tenemos que ∀ i ∈ I : h = fi en V ∩ Ui (por definición de
h), luego hU, f i = hV, hi, por último es claro que V es el subconjunto abierto más grande en el cual
hU, f i está representada por una función regular.
A continuación estudiaremos el problema anterior para mapeos racionales.
4.2 Ejemplo (Dominio de definición de un mapeo racional): Si ϕ es un mapeo racional de
X a Y , mostrar que existe un conjunto abierto maximal (con respecto a la inclusión) en el cual ϕ
está representada por un morfismo. Decimos que el mapeo racional está definido en los puntos de
dicho conjunto abierto.
Nuevamente suponemos que X y Y son cuasi-proyectivas, dados U, V dos conjuntos abiertos en
X, y f : U −→ Y , g : V −→ Y dos morfismos tales que f = g en U ∩ V , definimos la función
h : U ∪ V −→ Y dada por h(x) = f (x), si x ∈ U y h(x) = g(x), si x ∈ V . Primero, veamos que h
es continua. Dado W ⊆ Y cualquier conjunto abierto, tenemos que h−1 (W ) = {x ∈ U ∪ V | h(x) ∈
W } = f −1 (W ) ∪ g −1 (W ), y como f y g son morfismos, tenemos que h−1 (W ) es la unión de dos
conjuntos abiertos, y por lo tanto es abierto, luego, h es continua. Ahora sea λ : W −→ k una función
regular, entonces la función λ ◦ h : h−1 (W ) −→ k se puede ver como λ ◦ h : f −1 (W ) ∪ g −1 (W ) −→ k.
A continuación, dado P ∈ f −1 (W ) tal que P ∈
/ g −1 (W ), entonces, como f es un morfismo, tenemos
que λ ◦ h(P ) = λ ◦ f (P ) y es regular en P , de manera análoga se tiene que si P ∈ g −1 (W ) con
P ∈
/ f −1 (W ), entonces λ ◦ h(P ) = λ ◦ g(P ) es regular en P , por último, si P ∈ f −1 (W ) ∩ g −1 (W ),
entonces λ ◦ h(P ) = λ ◦ f (P ) = λ ◦ g(P ) es regular en P , por lo que λ ◦ h es regular en todo punto
de U ∪ V , y de esta manera, h es un morfismo.
Ahora sea hU, ϕi = {(Ui , ϕi )}i∈I un mapeo racional, por argumentos similares a los ofrecidos en el
Ejemplo 4.1, se tiene que la función h definida en V = ∪i∈I Ui por x ∈ Ui ⇒ h(x) := fi (x) es un
morfismo definido en un conjunto abierto maximal de X que representa al mapeo racional hU, ϕi.
4.3 Ejemplo (Transformaciones Planas de Cremona): Un mapeo birracional de P2 en sı́ mismo se llama una transformación plana de Cremona. Daremos un ejemplo, llamado transformación
cuadrática. Es el mapeo racional ϕ : P2 −→ P2 dado por [a0 : a1 : a2 ] 7→ [a1 a2 : a0 a2 : a0 a1 ], y
está definida en el subconjunto de P2 en el cual no hay dos elementos de {a0 , a1 , a2 } que sean iguales
a cero.
A continuación, notemos que ϕ como morfismo está definido en todo P2 excepto en los puntos
[1 : 0 : 0], [0 : 1 : 0], [0 : 0 : 1]. Sea ϕ = (f1 , f2 , f3 ) otra trı́ada de polinomios homogéneos del mismo
grado que definan la misma función ϕ. Podemos suponer que ∀i, j ∈ {1, 2, 3}, i 6= j : gcd(fi , fj ) = 1,
en este caso tenemos que
yz xz = 0, yz xy = 0, xz xy = 0.
f1 f2 f1 f3 f2 f3 Esto nos lleva a las siguientes relaciones:
yf2 = xf1 ,
zf3 = xf1 ,
77
zf3 = yf2 .
4.2. Una base para la topologı́a de Zariski
4. Mapeos racionales
Cómo x, y, z son elementos irreducibles (primos) en un DFU (k[x, y, z]), se sigue que yz | f1 , xz | f2 y
que yx | f3 , por lo tanto concluimos que ϕ = (yz, xz, xy) como mapeos racionales. La imagen de este
mapeo es todo P2 , excepto por las tres lı́neas coordenadas, pero vemos que los puntos en los que no
estaba definida ϕ se encuentran en la imagen, pues ϕ([0 : 1 : 1]) = [1 : 0 : 0], ϕ([1 : 0 : 1]) = [0 : 1 : 0]
y ϕ([0 : 1 : 1]) = [0 : 0 : 1]. Observamos primero que
ϕ2 ([a0 : a1 : a2 ]) = ϕ([a1 a2 : a0 a2 : a0 a1 ]) = [(a0 a1 a2 )a0 : (a0 a1 a2 )a1 : (a0 a1 a2 )a2 ] = (a0 a1 a2 )[a0 : a1 : a2 ].
Ası́, para todos los puntos [x : y : z] ∈ P2 tales que xyz 6= 0, tenemos que ϕ2 ([x : y : z]) = [x : y : z].
Luego, tenemos que en el conjunto abierto Ω := P2 −{las tres lı́neas proyectivas x = 0, y = 0, z = 0},
tenemos que ϕ es una función involutiva (i.e., es su propia inversa). Por lo tanto ϕ es un mapeo
birracional de P2 en sı́ mismo.
Notemos también que todos los puntos [0 : a1 : a2 ] en la lı́nea x = 0 (salvo los dos puntos en los que
ϕ no está definida) son enviados al punto [1 : 0 : 0]. Intuitivamente podemos decir que ϕ “colapsa”
la lı́nea x = 0, pero ya que ϕ = ϕ−1 , entonces también decimos que ϕ “levanta” el punto [1 : 0 : 0]
a una lı́nea.
4.2.– Una base para la topologı́a de Zariski
El trabajar con mapeos racionales nos hace estar alertas del hecho de que estaremos empleando
siempre subconjuntos abiertos de nuestras variedades, por lo tanto, es un buen tiempo para aprender
algo más sobre la topologı́a de las variedades.
Sea B = {Ui }i∈I una colección de conjuntos abiertos en Y . Recordemos que B es una base
para la topologı́a de Y si, y solo si, todo conjunto abierto de Y es la unión de elementos de B. De
manera equivalente, si P ∈ Y y U es un conjunto abierto en Y que contiene a P , entonces existe
un conjunto Ui ∈ B tal que P ∈ Ui ⊆ U .
Tomemos el polinomio f (x) = x ∈ k[x] y sea Y la hipersuperficie definida por Y = Z(f ) = {0}.
En el Ejemplo 3.9, vimos que A1 −Y es isomorfa a la hipersuperficie H en A2 dada por H = Z(yf −1),
y que de esta forma, la lı́nea afı́n perforada A1 − {0} podı́a ser considerada como una variedad afı́n,
cuyo anillo coordenado resultó ser k[x, x−1 ] = k[x]f . Lo que haremos a continuación sera dar una
generalización de éste hecho para dimensiones superiores.
Lema 4.2. Sea Y una hipersuperficie en An dada por la ecuación f (x1 , . . . , xn ) = 0. Entonces
V = An − Y es isomorfa a la hipersuperficie H en An+1 dada por xn+1 f = 1. En particular, V
es afı́n, y su anillo coordenado afı́n es Af .
Demostración. Primero estableceremos la existencia del isomorfismo. Para P = (a1 , . . . , an+1 ) ∈
H, definimos ψ(P ) = (a1 , . . . , an ). Entonces claramente ψ es un morfismo de H en An . También
es claro que ψ da un mapeo biyectivo de H sobre su imagen, la cual es An − Y . Para probar
que ψ es un isomorfismo, es suficiente mostrar que ψ −1 es un morfismo. Pero ψ −1 (a1 , . . . , an ) =
(a1 , . . . , an , 1/f (a1 , . . . , an )), entonces, el hecho de que ψ −1 es un morfismo en An − Y se sigue de
(3.8).
Veamos a continuación que O(V ) = Af . Sea ϕ ∈ O(V ), entonces como la topologı́a de Zariski es
compacta en cualquier subconjunto de An (véase el inciso (2) del Ejemplo 1.12), existen U1 , . . . , Us
abiertos en V tales que V = ∪si=1 Ui y ϕ|Ui = gi /hi , con gi , hi ∈ A. Si i 6= j, Ui ∩ Uj 6= ∅, entonces
Ui ∩ Uj es un abierto en An , por lo tanto gi hj = gj hi como funciones en V . Si I = hh1 , . . . , hs i,
entonces ya que los polinomios h1 , . . . , hs no se p
anulan en todo p
V , tenemos que Z(I) ⊆ Z(f ), lo
que implica
que al obtener los radicales se tiene hh1 , . . . , hs i ⊃ hf i, por loP
que ∃ βi ∈ A tal que
P
f m = si=1 βi hi ; viendo la última relación en k(x1 , . . . , xn ), tenemos que 1 = si=1 βi hi /f m .
78
4.2. Una base para la topologı́a de Zariski
4. Mapeos racionales
A continuación tomemos t ∈ Uj , entonces se tiene
P
P
Ps
βi (t)gi (t)
gj (t) si=1 βi (t)hi (t)
hj (t) si=1 βi (t)gi (t)
gj (t)
ϕ(t) =
=
=
= i=1 m
,
m
m
hj (t)
f (t)hj (t)
f (t)hj (t)
f (t)
P
pero notemos que ésta última relación no depende de j, luego, ϕ = si=1 βi gi /f m ∈ Af y tenemos
que O(V ) ⊆ Af .
Ahora sea λ ∈ Af , entonces λ = g/f m , con g ∈ A. Sea P ∈ V , tenemos que f (P ) 6= 0, por lo
tanto λ ∈ O(V ). Concluimos de las dos contenciones anteriores que O(V ) = Af .
∗
Proposición 4.3. En cualquier variedad Y existe una base para la topologı́a que consiste de
subconjuntos abiertos afines.
Demostración. Debemos probar que para todo punto P ∈ Y y para todo conjunto abierto U que
contenga a P , existe un conjunto abierto afı́n V con P ∈ V ⊆ U . Primero, ya que U es también
una variedad, podemos asumir que U = Y . Segundo, ya que toda variedad es una variedad cuasiproyectiva, entonces Y está cubierta por variedades cuasi-afines (véase 2.8), por lo que podemos
suponer que Y es cuasi-afı́n en An . Sea Z = Y − Y , que es cerrado en An y sea a ⊆ A el ideal
de Z. Entonces, como Z es cerrado y P ∈
/ Z, ∃ f ∈ a tal que f (P ) 6= 0. Sea H la hipersuperficie
definida por f = 0 en An . Entonces Z ⊂ H pero P ∈
/ H. Por lo tanto P ∈ (Y − Y ∩ H) el cual es
un subconjunto abierto de Y . Más aún, Y − Y ∩ H es un subconjunto cerrado de An − H, el cual
es afı́n por (4.2), por lo tanto Y − Y ∩ H es afı́n. Esta es la vecindad afı́n requerida para P .
∗
Definición: Sea X ⊆ An una variedad afı́n, y sea f ∈ A(X). El conjunto abierto afı́n D(f ) =
X − Z(f ) se llama un subconjunto abierto principal de X.
De lo que hemos visto de la prueba anterior, tenemos que el anillo coordenado de la variedad
afı́n D(f ) = X − Z(f ) es A(D(F )) = A(X)f . Es interesante observar que para estos subconjuntos
abiertos principales, el anillo de funciones regulares es también una k-álgebra finitamente generada.
A continuación pasaremos al resultado principal de esta sección. Sea ϕ : X −→ Y un mapeo
racional dominante, representado por hU, ϕU i. Sea f ∈ K(Y ) una función racional, representada
por hV, f i, donde V es un abierto en Y y f es una función regular en V . Ya que ϕU (U ) es denso en
Y , ϕ−1
U (V ) es un subconjunto abierto no vacı́o en X, por lo tanto f ◦ ϕU es una función regular en
−1
ϕU (V ). Esto nos da una función racional en X, y de esta manera hemos definido un homomorfismo
de k-álgebras que va de K(Y ) a K(X), i.e., una inmersión de K(Y ) en K(X).
Teorema 4.4. Para cualesquiera dos variedades X y Y , la construcción anterior da una biyección entre
1. el conjunto de los mapeos racionales dominantes de X a Y , y
2. el conjunto de homomorfismos de k−álgebras de K(Y ) a K(X).
Más aún, esta correspondencia da una equivalencia de categorı́as que invierte el orden de las
flechas de la categorı́a de variedades y mapeos racionales con la categorı́a de extensiones de
campos finitamente generadas de k.
Demostración. Construiremos una inversa para el mapeo anterior. Sea θ : K(Y ) −→ K(X) un
homomorfismo de k-álgebras, y como θ(k) = k, se tiene que θ es un monomorfismo. Por (4.3),
Y está cubierta por variedades afines, por lo tanto, podemos asumir que Y es afı́n. Sea A(Y )
79
4.2. Una base para la topologı́a de Zariski
4. Mapeos racionales
su anillo coordenado afı́n, entonces tenemos que K(Y ) = coc A(Y ), y por lo tanto K(Y )/k es una
extensión de campos finitamente generada (i.e. generada como campo por los elementos que generan
a A(Y ) como k-álgebra). Ası́, sean y1 , . . . , yn generadores para A(Y ) como k-álgebra, entonces
θ(y1 ), . . . , θ(yn ) son funciones racionales en X. Podemos hallar un conjunto abierto U ⊆ X de
manera que todas las funciones θ(yi ) sean regulares en todo U . Entonces θ define un monomorfismo
de k-álgebras A(Y ) ,→ O(U ). Por (3.7) éste corresponde a un morfismo ϕ : U −→ Y , el cual nos da
un mapeo racional dominante de X a Y (véase la Proposición 3.21). Es fácil verificar que esto nos
da un mapeo de conjuntos (2)−→(1) que es la inversa del que se definió anteriormente.
Para establecer la existencia de la equivalencia, sólo necesitamos verificar que para toda variedad
Y , K(Y ) es finitamente generada sobre k, y recı́procamente, si K/k es una extensión de campos
finitamente generada, entonces K = K(Y ) para alguna Y . Si Y es una variedad, entonces K(Y ) =
K(U ) para cualquier subconjunto abierto afı́n, por lo que podemos asumir que Y es afı́n. Entonces
por el inciso 4 de (3.4), K(Y ) es una extensión de campos finitamente generada de k. Por otra parte,
sea K una extensión de campos finitamente generada de k y sea y1 , . . . , yn ∈ K un conjunto de
generadores, sea B la sub-k-álgebra de K generada por y1 , . . . , yn . Entonces por el Ejemplo (1.8),
B es isomorfa al anillo coordenado afı́n de alguna variedad Y en An . Entonces K = K(Y ) y hemos
terminado.
∗
Ya que el campo de funciones de una variedad está determinado por un subconjunto abierto, podrı́amos pensar que no transporta mucha información acerca de la variedad. Pero éste no es el caso,
tal y como lo ilustra el siguiente Corolario.
Corolario 4.5. Para cualesquiera dos variedades X, Y , las siguientes condiciones son equivalentes:
1. X y Y son birracionalmente equivalentes,
2. existen subconjuntos abiertos U ⊆ X y V ⊆ Y tales que U es isomorfo a V ,
3. K(X) ∼
= K(Y ) como k-álgebras.
Demostración.
(1) ⇒ (2). Sean ϕ : X −→ Y y ψ : Y −→ X mapeos racionales los cuales son inversos el uno
del otro. Representemos
por a ϕ y a ψ por hU, ϕi y por hV, ψi respectivamente. Entonces ψ ◦ ϕ
está representada por ϕ−1 (V ), ψ ◦ ϕ , y como ψ ◦ ϕ = id X como mapeo racional, ψ ◦ ϕ es la
identidad en ψ −1 (V ). De manera similar ϕ ◦ ψ es la identidad en ϕ−1 (U ). A continuación tomamos
ϕ−1 (ψ −1 (U )) como nuestro conjunto abierto en X, y ψ −1 (ϕ−1 (U )) como nuestro conjunto abierto
en Y . Se sigue de la construcción que estos dos conjuntos abiertos son isomorfos via ϕ y ψ.
(2) ⇒ (3) se sigue de la definición de campo de funciones.
(3) ⇒ (1) se sigue del teorema.
∗
En Geometrı́a Algebraica trabajamos con dos relaciones de equivalencia distintas, isomorfismo
y equivalencia birracional. La equivalencia birracional es claramente una relación más amplia que
la isomorfı́a; en otras palabras, dos variedades pueden ser birracionalmente equivalentes sin ser
isomorfas. Ya que la relación de isomorfismo está definida en cada punto, se tiene que esta relación
está más cerca a las nociones geométricas como homeomorfismo y difeomorfismo, y por ello es
más conveniente. El entender la relación entre estas dos relaciones de equivalencia es un problema
importante; la pregunta es saber que tan amplia resulta ser la equivalencia birracional cuando se le
compara con la relación de isomorfı́a, en otras palabras, nos interesa saber cuantas variedades son
distintas desde el punto de vista de la isomorfı́a, pero que resulten ser la misma desde el punto de
vista de la equivalencia birracional.
80
4.2. Una base para la topologı́a de Zariski
4. Mapeos racionales
4.4 Ejemplo: La equivalencia birracional hace que dos variedades sean muy similares, pero no
podemos llevar esto demasiado lejos. Por ejemplo, notemos que por el corolario anterior, Pn × Pm
y Pn+m son birracionalmente equivalentes, pues ambos poseen un subconjunto abierto isomorfo a
An+m . Pero estas variedades están lejos de ser isomorfas. De hecho, los únicos morfismos de Pn+m
a Pn × Pm son las funciones constantes.
Para ver esto, sea ϕ ∈ Hom (Pn+m , Pn × Pm ) un morfismo no constante, entonces al componerlo con
la primera proyección π1 obtenemos un morfismo π1 ◦ ϕPn+m −→ Pn . Pero como ya hemos visto,
dicho morfismo debe estar definido por una sola (n + 1)-ada de polinomios homogéneos del mismo
grado en S = k[x0 , . . . , xn+m ]. Pero cualesquiera n + 1 polinomios homogéneos del mismo grado en
el anillo S deben de tener una solución no trivial (ya que si a es el ideal que generan, tenemos que
ht a ≤ n + 1, y los únicos ideales sin ceros tienen que tener altura n + m + 1). Por lo tanto ϕ no
puede ser un morfismo, pues existirı́a un lugar en el que el mapeo no está definido.
Por supuesto, esto no podrı́a pasar si todos los n + 1 polinomios homogéneos tuvieran grado 0, pero
en este caso, la función que definen es constante. Si hacemos lo mismo al componer con la otra
función proyección, obtenemos la conclusión Hom (Pn+m , Pn × Pm ) = k.
Para ilustrar la noción de la correspondencia birracional, utilizaremos algunos resultados algebraicos sobre extensiones de campos para mostrar que toda variedad es birracionalmente equivalente
a una hipersuperficie (Ver Apéndice (A)).
α Teorema 4.6 (Teorema del elemento primitivo). Sea L/k una extensión de campos finita y separable. Entonces ∃ α ∈ L tal que L = k(α). Más aún, si β1 , . . . , βn es cualquier
Pn conjunto
de generadores de L sobre k, y si k es infinito, entonces se puede tomar α = j=1 cj βj , con
cj ∈ k.
Demostración. Ver [ZS58], Volúmen 1, Capı́tulo II, Teorema 19, página 84. La segunda afirmación
se sigue de la demostración dada ahı́.
∗
Teorema 4.7. Cualquier variedad X de dimensión r es birracionalmente equivalente a una
hipersuperficie en Pr+1 .
Demostración. La extensión de campos K(X)/k es finitamente generada, digamos K(X) =
k(t1 , . . . , tn ), considerando a las ti como funciones coordenadas de An vistas como funciones en X.
Tenemos que tr.d.(K(X)/k) = d, por lo que podemos tomar {t1 , . . . , td } ⊂ K(X) algebraicamente
independiente sobre k. Ası́, la torre de campos k ⊂ k(t1 , . . . , td ) ⊂ K(X) cumple que k(t1 , . . . , td )/k
es puramente trascendente y K(X)/k(t1 , . . . , td ) es algebraica, (Ver [Hun74], página 314) luego,
∀ y ∈ K(X) ∃ !g(T ) ∈ k(x1 , . . . , xn )[T ], g(T ) irreducible, tal que g(y) = 0. Ya que los coeficientes
de dicho polinomio son funciones racionales en t1 , . . . , td , al eliminar los denominadores de estos
coeficientes podemos formar el polinomio g(T1 , . . . , Td+1 ) ∈ k[T1 , . . . , Td+1 ] irreducible sobre k tal
que g(t1 , . . . , td , y) = 0.
Tomemos y = td+1 y sea f (T1 , . . . , Td+1 ) su polinomio irreducible correspondiente. Afirmamos
∂f
que ∃ i ∈ {1, . . . , d + 1} : ∂T
6= 0. De lo contrario, las potencias de las variables Ti serı́an todas
i
múltiplos de la caracterı́stica p del campo k, i.e., f serı́a de la forma
X
pid+1
f=
ai1 ···id+1 T1pi1 · · · Td+1
.
Ya que el campo es algebraicamente cerrado, podemos encontrar elementos bi1 ···id+1 tales que
P
id+1
ai1 ···id+1 = bpi1 ···id+1 . Definimos el polinomio g =
bi1 ···id+1 T1i1 · · · Td+1
. De esta forma, tenemos
81
4.2. Una base para la topologı́a de Zariski
4. Mapeos racionales
que f = g p , lo cual contradice la irreducibilidad de f . Si char k = 0, entonces concluimos que
∂f
∀ i ∈ {1, . . . , d + 1}, ( ∂T
= 0 =⇒ f ∈ k), pero como f es irreducible, no puede ser constante.
i
∂f
Supongamos pues que ∂T
6= 0, entonces se sigue que el elemento ti es algebraico sobre el campo
i
k(t1 , . . . , ti−1 , ti+1 , . . . , td+1 ), pues necesariamente la variable Ti aparece en el polinomio f (y por
hipótesis f (t1 , . . . , td+1 ) = 0). En consecuencia, se sigue que el conjunto {t1 , . . . , ti−1 , ti+1 , . . . , td+1 }
es algebraicamente independiente, pues de otro modo se tendrı́a que tr.d. k(t1 , . . . , td+1 )/k < d, lo
cual es una contradicción.
Ası́, siempre podemos renombrar las variables T1 , . . . , Tn de manera que t1 , . . . , td sean algebraicamente independientes sobre k y ∂T∂f
6= 0. Como f es por hipótesis irreducible sobre
d+1
0
k(t1 , . . . , td )[T ] y f (T ) 6= 0 se sigue que gcd(f, f 0 ) = 1, pues deg f 0 < deg f . Por último, ya que
k(t1 , . . . , td )[T ] es DIP, tenemos que ∃ g, h : 1 = f g + f 0 h (ver [Hun74], página 140), y sabemos que
c es raı́z múltiple de f si, y solo si, f (c) = 0 y f 0 (c) = 0. Por lo tanto, f no tiene raı́ces múltiples y
se sigue que td+1 es separable sobre k(t1 , . . . , td ).
Ya que td+2 es algebraico sobre k(t1 , . . . , td ), se sigue de (4.6) que podemos hallar un elemento y
tal que k(t1 , . . . , td+2 ) = k(t1 , . . . , td , y). Al repetir el proceso de adjuntar los elementos td+1 , . . . , tn
podemos representar al campo K(X) en la forma k(z1 , . . . , zd+1 ), donde z1 , . . . , zd son algebraicamente independientes sobre k y f (z1 , . . . , zd , zd+1 ) = 0, donde este polinomio f es irreducible sobre
k y ∂T∂f
6= 0 Esto define una hipersuperficie en Ar+1 con campo de funciones K, el cual, de
d+1
acuerdo con (4.5) es birracionalmente equivalente a X. Su cerradura proyectiva es la hipersuperficie
requerida Y ⊆ Pr+1 .
∗
Observación 4.1: De la demostración del Teorema 4.7 y de 4.6, se sigue que las coordenadas
z1 , . . . , zd+1 se pueden elegir como
Pncombinaciones lineales de las coordenadas originales x1 , . . . , xn ,
i.e., ∀ i ∈ {1, . . . , d + 1} : zi = j=1 cij xj . El mapeo (x1 , . . . , xn ) 7→ (z1 , . . . , zd+1 ) dado por éstas
fórmulas es una proyección de An paralelamente al subespacio lineal definido por las ecuaciones
P
n
j=1 cij xj = 0, i = 1, . . . , d + 1. Esto nos indica el significado geométrico del mapeo birracional.
Para trabajar el siguiente ejemplo necesitaremos de los siguientes resultados preliminares.
α Teorema 4.8.
1. Si α y β son números cardinales tales que β ≤ α y si α es infinito, entonces α + β = α;
n-veces
z
}|
{
2. sea A un conjunto infinito y para cada entero n ≥ 1, sea An = A × A × · · · × A. Entonces
Card An = Card A.
Demostración. Ver [Hun74] p.19, 20 para la demostración de ambas afirmaciones.
∗
4.5 Ejemplo: Probar que toda variedad de dimensión positiva sobre k tiene la misma cardinalidad
que el campo base k.
Probemos esto primero para An . Por el Ejemplo 1.7, se tiene que hay una biyección entre An y k n ,
utilizando que k es infinito y por (2) de el Teorema 4.8, se sigue que Card An = Card k n = Card k.
A continuación analicemos el caso de Pn ; iniciemos con P1 utilizando el homeomorfismo ϕ0 de (2.8),
tenemos que existe una biyección (en el sentido de la Teorı́a de Conjuntos) ϕ0 : P1 −→ (A1 ∪ {[0 :
1]}), por lo que Card P1 = Card A1 + 1, se sigue por lo anterior y por (1) del Teorema 4.8, que
Card P1 = Card k. Para n = 2, tenemos P2 = A2 t P1 , ası́ Card P2 = Card k, luego, se sigue por
un argumento inductivo que ∀ n ∈ N : Card Pn = Card k.
82
4.3. Explosión
4. Mapeos racionales
Tomemos ahora H ⊂ Pn cualquier hipersuperficie y sea P un punto que no se encuentre en H;
consideremos el morfismo proyección desde el punto P , πP : H −→ Pn−1 . Dado Q ∈ Pn−1 , la lı́nea
LP Q que une a P con Q es una variedad lineal de dimensión uno; por el Ejemplo 3.16, tenemos
que LP Q ∩ H 6= ∅. Luego πP (H) = Pn−1 . A continuación vemos que como πP es un morfismo de
variedades, entonces es continua, por lo que ∀ Q ∈ Pn−1 : πP−1 (Q) es un subconjunto cerrado no
vacı́o de LP Q = P1 , ası́ que debe de ser un subconjunto finito.
De las observaciones anteriores tenemos que P , πP : H −→ Pn−1 es un morfismo suprayectivo
finito-a-uno (i.e., la imagen inversa de cualquier elemento en Pn−1 es un conjunto finito), por lo
tanto, tenemos que H = tQ∈Pn−1 πP−1 (Q), y de esta manera concluimos que
Card H = Card
G
πP−1 (Q) = Card Pn−1 = Card k.
Q∈Pn−1
En este momento tomamos una variedad X de dimensión uno, entonces por el Teorema 4.7, X es
birracionalmente equivalente a una hipersuperficie H en P2 , y esto nos dice que existen dos conjuntos
abiertos U ⊆ X y V ⊆ H tales que U y V son isomorfos. Como dim X, dim H = 1, U y V deben
ser respectivamente complementos de subconjuntos finitos (incluyendo al vacı́o) de X y de H; se
sigue de lo anterior que Card X = Card H = Card k.
Supongamos ahora que si X es una variedad cuasi-proyectiva tal que dim X = r − 1 > 1, entonces
Card X = Card k. Sea X una variedad cuasi-proyectiva de dimensión r, nuevamente podemos
encontrar una hipersuperficie H ⊂ Pr+1 tal que X es birracionalmente equivalente a H, por lo
tanto podemos hallar dos subconjuntos abiertos U ⊆ X y V ⊆ H tales que U y V son isomorfos;
si V = H, entonces Card X ≥ Card H = Card k, y se sigue que Card X = Card H (pues como X
es cuasi-proyectiva está encajada en algún espacio afı́n o proyectivo y de esta manera se tiene que
Card X ≤ Card k, de donde tenemos la igualdad).
Asumamos que V 6= H; el resultado que citaremos a continuación se puede consultar en [Har92],
página 133, dice que si que si Y ⊂ Pr+1 es una variedad cuasi-proyectiva y si H ⊂ Pr+1 es una
hipersuperficie que no contiene a ninguna componente irreducible de Y , entonces dim (Y ∩ H) =
dim X − 1. Como V es abierto en H, entonces existe un abierto V 0 en Pr+1 tal que V = V 0 ∩ H,
por el resultado citado, tenemos que dim V = r − 1 y por la hipótesis inductiva, tenemos que
Card V = Card k, y por lo tanto se tiene nuevamente que Card X = Card k.
Observación 4.2: Del ejemplo anterior podemos ver que cualesquiera dos curvas planas irreducibles son homeomorfas si las consideramos con la topologı́a de Zariski, no importando que sean
afı́nes o proyectivas, y cualquiera que sea el campo de definición o el grado del polinomio que las crea.
Es decir, como espacios topológicos solo son simples conjuntos infinitos con la topologı́a cofinita.
4.3.– Explosión
Como otro ejemplo de mapeo birracional, construiremos la explosión de una variedad en un
punto. Esta construcción importante es la herramienta principal en la resolución de singularidades
de una variedad algebraica.
Primero construiremos la explosión de An en el punto O = (0, . . . , 0). Considere el producto
el cual es una variedad cuasi-proyectiva. Si x1 , . . . , xn son las coordenadas afines de An y
si y1 , . . . , yn son las coordenadas homogéneas de Pn−1 , entonces los conjuntos cerrados de An × Pn−1
estén definidos por polinomios en las variables xi y yj homogéneos con respecto a las variables yj .
An × Pn−1 ,
83
4.3. Explosión
4. Mapeos racionales
A continuación definimos la explosión de An en el punto O como el conjunto cerrado X ⊂
An × Pn−1 definido por las ecuaciones {xi yj = xj yi | i, j = 1, . . . , n}.
X JJ
/ An × Pn−1
JJJ ϕ
JJJ
JJJ
% n
A
Tenemos un morfismo natural ϕ : X −→ An obtenido al restringir el mapeo proyección de An ×Pn−1
al primer factor. A continuación estudiaremos las propiedades de X.
1. Si P ∈ An , P 6= O, entonces ϕ−1 (P ) es un sólo punto. De hecho ϕ nos da un isomorfismo
de X − ϕ−1 (O) sobre An − O. Para ver esto, sea P = (a1 , . . . , an ), con algún ai 6= 0, ahora,
si P × [y1 : · · · : yn ] ∈ ϕ−1 (P ), entonces ∀ j : yj = (aj /ai )yi , por lo tanto [y1 : · · · : yn ]
está unı́vocamente determinado como un punto en Pn−1 . De hecho, haciendo yi = ai , podemos
tomar [y1 : · · · : yn ] = [a1 : · · · : an ]; de esta manera, ϕ−1 (P ) consiste de un solo punto. Más
aún, para P ∈ (An − O), la función ψ(P ) = (a1 , . . . , an ) × [a1 : · · · : an ] define el morfismo
inverso a ϕ, y de esta manera se muestra que X − ϕ−1 (O) es isomorfo a An − O.
2. ϕ−1 (O) ∼
= Pn−1 . De hecho, ϕ−1 (O) consiste de todos los puntos O × Q con Q = [y1 : · · · :
yn ] ∈ Pn−1 sin ninguna restricción.
3. Los puntos de ϕ−1 (O) están en correspondencia 1-1 con el conjunto de lı́neas en An que
pasan por O. De hecho, cualquier lı́nea L que pasa por O en An se puede parametrizar por
las ecuaciones xi = ai t, i = 1, . . . , n, donde no todos los ai ∈ k son cero simultáneamente
y t ∈ A1 . A continuación consideramos la lı́nea L0 = ϕ−1 (L − O) en X − ϕ−1 (O), la cual
esta dada paramétricamente por las ecuaciones xi = ai t, yi = ai t, para t ∈ A1 − O, pero las
yi son coordenadas homogéneas en Pn−1 , por lo que también podemos describir a L0 por las
ecuaciones xi = ai t, yi = ai , para t ∈ A1 − O. Estas ecuaciones tienen sentido también para
t = 0, y nos dan la cerradura L0 de L0 en X. A continuación, notamos que L0 interseca a
ϕ−1 (O) en el punto Q = [a1 : · · · : an ] ∈ Pn−1 , por lo que vemos que enviando la lı́nea L al
punto Q nos da una correspondencia 1-1 entre las lı́neas en An que pasan a través de O y los
puntos de ϕ−1 (O).
4. X es irreducible. De hecho, X = (X − ϕ−1 (O)) ∪ ϕ−1 (O) y la primer pieza es isomorfa a
An − O, por lo tanto irreducible. Por otro lado, hemos visto que todo punto de ϕ−1 (O) está en
la cerradura de algún subconjunto (la lı́nea L0 ) de X − ϕ−1 (O). Por lo tanto X − ϕ−1 (O) es
denso en X, y X = X − ϕ−1 (O) es irreducible.
Definición: Si Y es una subvariedad cerrada de An que pasa a través de O, definimos la explosión
∼
de Y en el punto O como Y := (ϕ−1 (Y − O)), donde ϕ : X −→ An es la explosión de An en el
∼
punto O descrita anteriormente. También denotaremos por ϕ : Y −→ Y al morfismo ϕ| ∼ . Para
Y
hacer una explosión en cualquier otro punto P ∈ An , hacemos un cambio lineal de coordenadas que
envı́e P a O.
∼
Note que ϕ induce un isomorfismo de Y − ϕ−1 (O) a Y − O, por lo que ϕ es un morfismo
∼
birracional de Y a Y . El efecto de explotar un punto de Y es “separar” Y cerca de O en relación
a las diferentes direcciones de las lı́neas que pasan por O. Ilustraremos esto a continuación con un
ejemplo.
84
4.3. Explosión
4. Mapeos racionales
x
x
j
Y
E
u=1
u=-1
u=0
X
y
Y
t=0
Figura 4.1: Explosión.
4.6 Ejemplo (Explosión del Folium Cartesii en el origen): Sea Y la curva cúbica plana dada por la ecuación y 2 = x2 (x + 1). Explotaremos la variedad Y en el punto O (Figura 4.3). Sean t y
u las coordenadas homogéneas de P1 . Entonces X, la explosión de A2 en el punto O, está definida
por la ecuación xu = ty dentro de A2 × P1 . Se parece a A2 , excepto que se ha reemplazado el punto
O por una copia de P1 que corresponde a las pendientes de las lı́neas que pasan por O. Llamamos
a este P1 la curva excepcional, y la denotamos por E.
Al considerar las ecuaciones y 2 = x2 (x + 1) y xu = ty en A2 × P1 , obtenemos la imagen inversa
total de Y en X. Como P1 esta cubierto por los conjuntos abiertos U0 = u 6= 0 y U1 = t 6= 0, los
consideraremos por separado. Si t 6= 0, podemos hacer t = 1 y utilizar a u como un parámetro afı́n.
Utilizaremos el isomorfismo usual
A2 × U0 ∼
= A3 , donde (x, y) × [1 : u] 7→ (x, y, u).
De esta manera tenemos las ecuaciones
y 2 = x2 (x + 1),
y = xu
en A3 con coordenadas x, y, u. Al sustituir obtenemos x2 u2 − x2 (x + 1) = 0, que se factoriza como
x2 (u2 − (x + 1)) = 0. Por lo tanto obtenemos dos componentes irreducibles, la primera definida por
x = 0, y = 0, u arbitraria, la cual representa a E, la segunda está definida por u2 = x + 1, y = xu,
∼
∼
la cual es Y . Notemos que Y interseca a la curva excepcional E en los puntos u = 1 y u = −1.
Estos puntos corresponden a las pendientes de las dos ramas de Y en el punto O.
De manera similar podemos verificar que la imagen inversa total del eje x consiste de E y de otra
curva irreducible, a la que llamaremos la transformación estricta del eje x (ésta es la curva L0 que
corresponde a la lı́nea L = eje x, descrita anteriormente). Esta transformación estricta interseca a
E en el punto u = 0. Al considerar el otro conjunto abierto (i.e., u 6= 0) en A2 × P1 , vemos que la
transformación estricta del eje y interseca a E en el punto t = 0, u = 1.
Todas estas conclusiones están resumidas en la Figura 4.1. El efecto de explotar es, por lo tanto, el
separar las ramas de las curvas que pasan por O de acuerdo a sus pendientes. Si las pendientes son
distintas, sus transformaciones estrictas no se intersecan en X. En vez de esto, intersecan a E en
puntos que corresponden a las diferentes pendientes.
85
4.3. Explosión
4. Mapeos racionales
4.7 Ejemplo (Explosión de la curva cuspidal): Sea Y la curva cuspidal y 2 = x3 en A2 . Ex∼
plote el punto O = (0, 0) de la variedad. Sea E la curva excepcional y Y la transformación estricta
∼
∼
∼
de Y . Mostrar que E interseca a Y en un punto y que Y ∼
= A1 . En este caso el morfismo ϕ : Y −→ Y
es biyectivo y bicontinuo, pero no es un isomorfismo.
Sean t, u las coordenadas homogéneas de P1 y sea X la explosión de A2 en el punto O (definida por
la ecuación xu = ty dentro de A2 × P1 ), obtenemos la imagen inversa total de Y en X al considerar
las ecuaciones y 2 = x3 y xu = ty en A2 × P1 . Nuevamente elegimos t 6= 0, por lo cual podemos
hacer t = 1 y obtener las ecuaciones
y 2 = x3
y = xu.
Sustituyendo obtenemos x3 − x2 u2 = 0, la cual se factoriza en x2 (x − u2 ) = 0. Ası́ obtenemos dos
componentes irreducibles, una definida por x = 0, y = 0, u arbitrario, la cual corresponde a E, y la
∼
otra está definida por las ecuaciones u2 = x, y = xu, la cual corresponde a Y . De aquı́ obtenemos
∼
que E interseca a Y solamente en un punto, a saber, u = 0, y es único pues en este caso la pendiente
de las dos ramas de Y en O es la misma.
∼
A continuación, sabemos que Y esta definida por:
∼
Y = {(x, y) × [1, u] | y = xu u2 = x}.
Utilizando el isomorfismo usual (x, y) × [1, u] 7→ (x, y, u) de A2 × U0 a A3 , seguido del cambio de
∼
∼
coordenadas (a, b, c) 7→ (c, a, b), obtenemos un isomorfismo ψ : Y −→ ψ(Y ) dado por (x, xu) ×
[1, u] 7→ (u, x, xu). Observemos que el conjunto
∼
ψ(Y ) = {(u, x, xu) | x ∈ A1 }
satisface las ecuaciones
u2 − x = 0,
u3 − xu = 0.
∼
Luego, ψ(Y ) no es más que la curva cúbica torcida afı́n C = {(t, t2 , t3 ) | t ∈ A1 }, y concluimos
∼
∼
de esta manera que Y ∼
= A1 . En este caso tenemos que ϕ : Y −→ Y es un morfismo biyectivo y
bicontinuo que no es un isomorfismo, pues de lo contrario tendrı́amos que Y ∼
= A1 , lo cual ya vimos
que no puede suceder.
86
Capı́tulo 5
Intersecciones en el Espacio
Proyectivo
El propósito de esta capı́tulo es estudiar la intersección de variedades en el espacio proyectivo
Y yZ
Pn , ¿Qué podemos decir acerca de Y ∩ Z ?. Hemos visto ya (Ejemplo
y aplicarlas después a la construcción de ejemplos sobre códigos algebraicos. Si
son variedades en
2.11) que Y
∩ Z no necesariamente es una variedad, pero éste es un conjunto algebraico y
podemos preguntarnos primero acerca de la dimensión de sus componentes irreducibles.
Nuestra tarea principal en la Sección 5.1 será la definición del grado de una variedad Y
⊆ Pn
de dimensión r . Clásicamente, el grado de Y se define como el máximo número de puntos de
intersección de Y con un subespacio lineal L de dimensión n − r “suficientemente general”
(ver [S+ 00], página 70). Sin embargo, esta definición es difı́cil de usar, además de que el
término suficientemente general carece de precisión, por lo tanto daremos una definición de
grado puramente algebraica utilizando el polinomio de Hilbert de una variedad proyectiva.
Está definición, aunque no tenga tanta motivación geométrica, tiene la ventaja de ser precisa.
En la Sección 5.2 utilizamos resultados y técnicas del Álgebra Conmutativa como el ainvariante del ideal de un conjunto algebraico, el polinomio y la serie de Hilbert, ası́ como
resoluciones libres finitas y el módulo canónico para dar algunos ejemplos de códigos de
evaluación para ilustrar estas ideas.
5.1.– El Polinomio de Hilbert y el grado de un conjunto algebraico
Tomaremos nuestra discusión inicial del trabajo realizado en la Sección 2.6 con las variedades
lineales en el espacio proyectivo (Ejemplo 2.10), donde vimos que si Y y Z son variedades lineales
en Pn , con dim Y = r y dim Z = s, se tiene que si r + s − n ≥ 0, entonces Y ∩ Z 6= ∅ es una variedad
lineal con dim (Y ∩ Z) ≥ r + s − n. Nuestro primer resultado en esta sección será probar que si Y y
Z son variedades en Pn de dimensiones r y s, entonces toda componente irreducible de Y ∩ Z tiene
dimensión no menor a r + s − n. Más aún, si r + s − n ≥ 0, entonces Y ∩ Z es no vacı́a.
Proposición 5.1 (Teorema de la Dimensión Afı́n). Sean Y y Z variedades de dimensiones
r y s en An . Entonces toda componente irreducible W de Y ∩ Z tiene dimensión no menor a
r + s − n.
Demostración. Hemos visto en el Ejemplo 1.20 que si Z es una hipersuperficie, con Y * Z,
entonces toda componente irreducible de Y ∩ Z tiene dimensión r − 1. Para el caso general, consideremos el producto Y × Z ⊆ A2n , el cual es una variedad de dimension r + s. Sea ∆ la diagonal
{(P, P ) | P ∈ An } ⊆ A2n . Entonces An es isomorfo a ∆ vı́a el mapeo P 7→ (P, P ), y bajo este isomorfismo, Y ∩ Z corresponde a (Y × Z) ∩ ∆. Como dim ∆ = n y ya que r + s − n = (r + s) + n − 2n, la
prueba se reduce a demostrar el resultado para las dos variedades Y × Z y ∆ en A2n . Notemos que
87
5.1. El Polinomio de Hilbert y el grado de un conjunto algebraico
5. Intersecciones en el Espacio Proyectivo
∆ es la intersección de n hipersuperficies exactamente, a saber x1 − y1 = 0, . . . , xn − yn = 0, donde
x1 , . . . , xn , y1 , . . . , yn son las coordenadas de A2n . Al aplicar n veces el caso especial mencionado al
inicio de esta demostración, se sigue el resultado.
∗
Ahora probaremos el resultado correspondiente para variedades proyectivas.
Proposición 5.2 (Teorema de la Dimensión Proyectiva). Sean Y y Z variedades de dimensiones r y s en Pn . Entonces toda componente irreducible de Y ∩ Z tiene dimensión no
menor a r + s − n. Más aún, si r + s − n ≥ 0, entonces Y ∩ Z 6= ∅.
Demostración. La primera afirmación se sigue del resultado anterior, ya que Pn esta cubierto
por n-espacios afines. Para la segunda afirmación, sean C(Y ) y C(Z) los conos afines sobre Y y
Z en An+1 . Entonces dim C(Y ) = r + 1 y dim C(Z) = s + 1, respectivamente. Más aún, C(Y ) ∩
C(Z) 6= ∅, ya que ambos contienen al origen P = (0, . . . , 0). Por el Teorema de la dimensión afı́n,
dim (C(Y ) ∩ C(Z)) ≥ (r + 1) + (s + 1) − (n + 1) = r + s − n + 1 > 0. Ası́ C(Y ) ∩ C(Z) contiene
algún punto Q 6= P , y por ende Y ∩ Z 6= ∅.
∗
A continuación definiremos el polinomio de Hilbert para una variedad proyectiva. La idea es
asociarle a cada variedad proyectiva Y ⊆ Pnk un polinomio PY ∈ Q[z] del que podamos obtener varios
invariantes numéricos de Y . Definiremos PY comenzando con el anillo coordenado homogéneo S(Y ).
De manera más general, definiremos un polinomio de Hilbert para cualquier S-módulo graduado,
donde S = k[x1 , . . . , xn ].
Definición: Un polinomio numérico es un polinomio P (z) ∈ Q[z] tal que ∀ n 0 : P (n) ∈ Z.
Proposición 5.3.
1. Si P ∈ Q[z] es un polinomio numérico, entonces existen c0 , . . . , cr ∈ Z tales que
z
z
P (z) = c0
+ c1
+ · · · + cr .
r
r−1
2. Si f : Z −→ Z es cualquier función y, si existe un polinomio numérico Q(z) tal que la
función diferencia ∆f := f (n + 1) − f (n) es igual a Q(n) para todo n 0, entonces existe
un polinomio numérico P (z) de manera que ∀n 0 : f (n) = P (n).
Demostración.
(1) La prueba
procederá por inducción sobre el grado de P , siendo obvio el caso de grado 0.
Ya que zr = z r /r! + · · · , todo polinomio P ∈ Q[z] de grado r se puede expresar en la forma
anterior, con c0 , . . . , cr ∈ Q. Para todo polinomio
P definimos el polinomio diferencia ∆P por
z
z
∆P (z) := P (z + 1) − P (z). Ya que ∆ r = r−1 , se tiene
z
z
∆P = c0
+ c1
+ · · · + cr−1 .
r−1
r−2
Por hipótesis inductiva, c0 , . . . , cr−1 ∈ Z. Pero entonces cr ∈ Z ya que ∀ n ∈ Z : P (n) ∈ Z.
(2) Escribimos
z
Q = c0
+ · · · + cr , con c0 , . . . , cr ∈ Z.
r
Sea
z
z
P = c0
+ · · · + cr
.
r+1
1
Entonces ∆P = Q, por lo que ∀ n 0 : ∆(f − P )(n) = 0, ası́ existe una constante cr+1 tal que
∀ n 0 : (f − P )(n) = cr+1 , por lo tanto ∀ n 0 : f (n) = P (n) + cr+1 como se deseaba.
∗
88
5.1. El Polinomio de Hilbert y el grado de un conjunto algebraico
5. Intersecciones en el Espacio Proyectivo
A continuación necesitamos algunos hechos acerca de módulos graduados. Sea S un anillo
graL
duado. Un S-módulo graduado es un S-módulo M , junto con una descomposición M = d∈Z Md ,
tal que ∀ d, e ∈ Z : Sd · Me ⊆ Md+e .
Antes de proseguir, necesitamos una notación para indicar que hemos alterado un módulo graduado M al “torcer” su graduación en d lugares. Definimos M (d) a ser este módulo graduado.
De manera más formal, M (d) es isomorfo a M como módulo y tiene una graduación definida por
∀ e ∈ Z : M (d)e = Md+e .
Usualmente se conoce a M (d) como el d-ésimo módulo torcido de M . Muchos mapeos naturales
de módulos graduados envı́an la graduación del módulo de salida a la graduación del módulo de
llegada con un corrimiento de la graduación. Utilizando esta notación, podemos escribirlos como
mapeos de grado 0 (es decir, que envı́an elementos homogéneos a elementos homogéneos del mismo
grado) entre uno de los módulos y el torcimiento del otro. Esto hace más fácil seguir de cerca a
las componentes graduadas. Por ejemplo, si tomamos M = S = k[x0 , . . . , xn ] y f ∈ Se , entonces la
multiplicación por f induce un mapeo ϕf de M en M que eleva el grado de los elementos en e. Por
lo tanto, lo podemos pensar como un mapeo de grado 0 de M (−e) a M .
Si M es un S-módulo graduado, definimos el anulador de M , Ann M := {s ∈ S | s · M = 0}.
Éste es un ideal homogéneo en S.
Proposición 5.4. Sea M un módulo graduado finitamente generado sobre un anillo noetheriano
graduado S. Entonces existe una filtración 0 = M 0 ⊂ M 1 ⊂ · · · ⊂ M r = M por submódulos
graduados, tal que ∀ i : M i /M i−1 ∼
= (S/pi )(li ), donde pi es un ideal primo homogéneo de S, y
li ∈ Z. Dicha filtración no es única, pero tenemos que:
1. si p es un ideal primo homogéneo de S, entonces p ⊇ Ann M ⇔ ∃ i : p ⊇ pi . En particular,
los elementos minimales del conjunto {p1 , . . . , pr } no son más que los primos minimales de
M , i.e., los primos que son minimales con respecto a la contención de Ann M ;
2. para cada primo minimal de M , el número de veces en las que p aparece en el conjunto
{p1 , . . . , pr } es igual a la longitud de Mp sobre el anillo local Sp (y por ende independiente
de la filtración).
Demostración. Para la existencia de la filtración, consideramos el conjunto Ω de submódulos
graduados de M que admiten tal filtración. Claramente, el módulo cero la admite, por lo tanto
Ω 6= ∅. Como M es un módulo noetheriano (ver [Kun85] página 14), entonces Ω posee un elemento
maximal M 0 ⊆ M . A continuación sea M 00 = M/M 0 . Si M 00 = 0 hemos terminado, de lo contrario,
tomamos el conjunto de ideales I = {Im = Ann hmi |m ∈ M 00 es un elemento homogéneo, m 6= 0}.
Todo Im es un ideal homogéneo con Im 6= S. Ya que S es un anillo noetheriano, podemos hallar un
elemento m ∈ M 00 , m 6= 0, tal que Im es un elemento maximal en el conjunto I .
Afirmamos que Im es un ideal primo. Sean a, b ∈ S, supongamos que ab ∈ Im , pero que b ∈
/ Im .
Al dividir en elementos homogéneos podemos suponer que a, b son homogéneos. A continuación
consideramos el elemento bm ∈ M 00 . Como b ∈
/ Im , bm 6= 0. Tenemos que Im ⊆ Ibm , pero por la
maximalidad de Im se tiene que Ibm = Im . Pero ab ∈ Im , por lo que abm = 0 y ası́ a ∈ Im , como se
querı́a probar. Ası́ Im es un ideal primo homogéneo de S, llamémoslo p. Supongamos que m sea de
grado l, entonces el módulo N ⊆ M 00 generado por m es isomorfo a S/p(−l). Sea N 0 ⊆ M la imagen
inversa de N en M . Entonces M 0 ⊆ N 0 , y N 0 /M 0 ∼
= (S/p)(−l). Por lo tanto N 0 también tiene una
filtración del tipo requerido. Esto contradice la maximalidad de M 0 . Concluimos que M 0 = M , lo
que demuestra la existencia de la filtración.
89
5.1. El Polinomio de Hilbert y el grado de un conjunto algebraico
5. Intersecciones en el Espacio Proyectivo
Ahora supongamos que se cuenta con una filtración de este tipo para M . Entonces es claro que
p ⊇ Ann M ⇔ ∃ i : p ⊇ Ann (M i /M i−1 ). Pero Ann (S/pi (l)) = pi , y esto demuestra (1).
Para demostrar (2) localizamos en un primo minimal p. Ya que p es minimal en el conjunto
{p1 , . . . , pr }, tendremos que después de la localización Mpi /Mpi−1 salvo en los casos en los que pi = p,
pero en estos casos se tiene que Mpi /Mpi−1 ∼
= (S/p)p = coc (S/p) (olvidamos la graduación). Esto
muestra que Mp es un Sp -módulo de longitud finita igual al número de veces que p aparece en el
conjunto {p1 , . . . , pr }.
∗
Definición: Si p es un primo minimal de un S-módulo graduado M (donde S = k[x0 , . . . , xn ]),
definimos la multiplicidad de M en p, denotada por µp (M ), como la longitud de Mp sobre Sp .
Ahora podemos definir el polinomio de Hilbert de un S-módulo graduado M . Primero definimos
la función de Hilbert ϕM de M dada por
ϕM (l) = dimk Ml , ∀ l ∈ Z.
Teorema 5.5 (Hilbert–Serre). Sea M un S-modulo graduado finitamente generado. Entonces
existe un único polinomio PM (z) ∈ Q[z] tal que ∀ l 0 : ϕM (l) = PM (l). Más aún, deg PM (z) =
dim Z(Ann M ), dónde Z denota el conjunto de ceros en Pn de un ideal homogéneo.
Demostración. Si 0 → M 0 → M → M 00 → 0 es una sucesión exacta corta, entonces ϕM =
ϕM 0 + ϕM 00 , y Z(Ann M ) = Z(Ann M 0 ) ∪ Z(Ann M 00 ), por lo que si el teorema es cierto para M 0 y
M 00 , entonces también es cierto para M . Por (5.4), M tiene una filtración con cocientes de la forma
(S/p)(l), donde p es un ideal primo homogéneo y l ∈ Z. Por lo tanto es suficiente probar el teorema
para M ∼
= S/p(l). El parámetro l corresponde a un cambio de variable z 7→ z + l, por lo que es
suficiente considerar el caso M = S/p. Si p = hx0 , . . . , xn i, entonces ϕM (l) = 0 para l > 0, ası́ que
PM = 0 es el polinomio correspondiente, y deg PM = dim Z(p), donde hacemos las convenciones
deg 0 = −1 y dim ∅ = −1.
x
Si p 6= hx0 , . . . , xn i, elegimos xi ∈
/ p, y consideramos la sucesión exacta 0 → M →i M → M 00 → 0,
donde M 00 = M/xi M . Entonces ϕM 00 (l) = ϕM (l) − ϕM (l − 1) = (∆ϕM )(l − 1). Por otra parte,
Z(Ann M 00 ) = Z(p) ∩ H, donde H es el hiperplano xi = 0, y Z(p) * H por la elección de xi , por lo
tanto, por (5.2), dim Z(Ann M 00 ) = dim Z(p)−1. Utilizando ahora inducción sobre dim Z(Ann M ),
podemos suponer que ϕM 00 es una función polinomial, correspondiente a un polinomio PM 00 con
deg PM 00 = dim Z(Ann M 00 ). Ahora, por (5.3), se sigue que ϕM es una función polinomial que
corresponde a un polinomio de grado dim Z(p). La unicidad de PM es clara.
Definición: El polinomio PM de este teorema es el polinomio de Hilbert de M .
El clasificar a todas las variedades proyectivas salvo equivalencia proyectiva (Ejemplo 3.17) es una
tarea ciertamente muy complicada. Sin embargo se han ideado nuevas formas para intentar resolver
el problema. Como un primer paso es de mucha utilidad identificar invariantes de las variedades
proyectivas: números (u otro tipo de información) que partan la clase de las subvariedades proyectivas de Pn . Uno de tales invariantes numéricos es el grado, que a continuación definimos.
Definición: Si Y ⊆ Pn es un conjunto algebraico de dimensión r, definimos el polinomio de Hilbert
de Y como el polinomio de Hilbert PY de su anillo coordenado homogéneo S(Y ). (Por el teorema
anterior, este es un polinomio de grado r.) Definimos el grado de Y (denotado por deg Y ) a ser r!
veces el coeficiente lı́der de PY .
90
5.1. El Polinomio de Hilbert y el grado de un conjunto algebraico
5. Intersecciones en el Espacio Proyectivo
Proposición 5.6.
1. Si Y ⊆ Pn , Y 6= ∅, entonces el grado de Y es un entero positivo.
2. Sea Y = Y1 ∪ Y2 , donde Y1 y Y2 tienen la misma dimensión r, y donde dim (Y1 ∩ Y2 ) < r.
Entonces deg Y = deg Y1 + deg Y2 .
3. deg Pn = 1
4. Si H ⊆ Pn es una hipersuperficie cuyo ideal es generado por un polinomio homogéneo de
grado d, entonces deg H = d. (En otras palabras, esta definición de grado es consistente
con el grado de una hipersuperficie tal y como se define anteriormente en )
Demostración.
(1) Como Y 6= ∅, PY es un polinomio no cero con deg PY = r = dim Y . Por el inciso 1 de (5.3),
deg Y = co ∈ Z. c0 es positivo pues para l 0, PY (l) = ϕS/I (l) 0.
(2) Sean I1 e I2 los ideales de Y1 y Y2 , respectivamente. Entonces I = I1 ∩ I2 es el ideal de Y .
Tenemos una sucesión exacta
0 → S/I → S/I1 ⊕ S/I2 → S/(I1 + I2 ) → 0.
Ahora Z(I1 + I2 ) = Y1 ∩ Y2 , que tiene menor dimensión. Por lo tanto PS/(I1 +I2 ) tiene grado menor
que r. Por lo tanto el coeficiente lı́der de PS/I es la suma de los coeficientes lı́deres de PS/I1 y PS/I2 .
(3) Calculemos el polinomio de Hilbert de Pn (lo cual ya hicimos al inicio de la Sección 2.4). Es el
polinomio PS , donde S = k[x0 , . . . , xn ] definido por
(
l+n
,
si l ≥ 0,
n
ϕS (l) =
,
0,
si l < 0
por lo que PS =
z+n
n
. En particular, su coeficiente lı́der es (n!)−1 . Por lo tanto deg Pn = 1.
(4) Si f ∈ S es un polinomio homogéneo de grado d, entonces tenemos una sucesión exacta de
S-módulos graduados
f
0 → S(−d) → S → S/ hf i → 0.
Ası́
ϕS/hf i (l) = ϕS (l) − ϕS (l − d).
Por lo tanto podemos hallar el polinomio de Hilbert de H, como
z+n
z−d+n
d
z n−1 + · · · .
PH (z) =
−
=
(n − 1)!
n
n
∗
Concluimos que deg H = d.
5.1 Ejemplo (El género aritmético): Sea Y una variedad de dimensión r en Pn , cuyo polinomio
de Hilbert es PY . Definimos el género aritmético de Y como pa (Y ) := (−1)r (PY (0) − 1). Éste es
un invariante importante que, como se puede demostrar (ver [Har77], Capı́tulo III, Ejercicio 5.3) es
independiente de la inmersión de Y en un espacio proyectivo dado.
a) Mostrar que pa (Pn ) = 0.
Sabemos que el polinomio de Hilbert de Pn es P (x) =
sin importar el número n.
91
x+n
n
, ası́ P (0) = 1. Por lo tanto pa (Pn ) = 0
5.1. El Polinomio de Hilbert y el grado de un conjunto algebraico
5. Intersecciones en el Espacio Proyectivo
b) Si Y es una curva plana de grado d, mostrar que pa (Y ) = 21 (d − 1)(d − 2).
Podemos interpretar a Y como una hipersuperficie de grado d en P2 , por lo que podemos utilizar
la fórmula encontrada en la demostración del inciso (4) de 5.6 y obtener que
x+2
x−d+2
P( Y )(x) =
−
= 12 {(x + 1)(x + 2) − (x − d + 1)(x − d + 2)} .
2
2
Haciendo x = 0, obtenemos que PY (0) = 1 − 12 (d − 1)(d − 2). Tenemos que dim Y = 1, por lo
que se sigue que pa (Y ) = 21 (d − 1)(d − 2).
c) De manera más general, si H es una hipersuperficie de grado d en Pn , entonces pa (H) = d−1
n .
,y
− x−d+n
Utilizando la misma fórmula nuevamente, tenemos que PY (x) = x+n
n
n
n 1
n d−1
PY (0) = 1 − (−1) n! (d − n)(d − n + 1) · · · (d − 1) = 1 − (−1)
.
n
Como dim H = n − 1, se sigue que pa (Y ) = (−1)2n d−1
= d−1
n
n .
d ) Si Y es una intersección completa de superficies de grados a, b en P3 , entonces pa (Y ) = 12 ab(a +
b − 4) + 1.
Sean f , g ∈ S = k[x0 , x1 , x2 , x3 ] tales que
f = a y deg g = b, con Y = Z(f, g). Sabemos de
deg
`−a+3
la proposición 5.6 que ϕS/hf i (`) = `+3
−
. Consideremos la siguiente sucesión exacta de
3
3
S-módulos graduados
g
0 → S(−b) → S/ hf i → S/ hf, gi → 0.
Entonces
ϕS/hf,gi (`) = ϕS/hf i (`) − ϕS/hf i (` − b)
`+3
`−a+3
`−b+3
`−a−b+3
=
−
−
+
.
3
3
3
3
Si hacemos ` = 0 en la relación anterior obtenemos que ϕS/hf,gi (0) = 1 − (1 + 12 ab(a + b − 4)), de
donde se sigue que pa (Y ) = 1 + 12 ab(a + b − 4) por que dim Y = 3 − 2 = 1.
e) Sean Y ⊆ Pn , Z ⊆ Pm variedades proyectivas, y encajamos Y × Z ⊆ Pn × Pm −→ PN con la
inmersión de Segre. Mostrar que
pa (Y × Z) = pa (Y )pa (Z) + (−1)s pa (Y ) + (−1)r pa (Z).
Sean xi , yj y zij , para i ∈ {0, . . . , n}, j ∈ {0, . . . , m} las coordenadas homogéneas de Pn , Pm y
PN respectivamente. Si identificamos a Pn × Pm con su imagen isomorfa dentro de PN , sabemos
que zij = xi yj . En particular, cualquier polinomio homogéneo f (z00 , . . . , znm ) de grado d en
las variables zij en Pn × Pm ⊂ PN es de la forma g(x0 , . . . , xn ; y0 , . . . , ym ), donde el polinomio
g es homogéneo tanto en las variables x0 , . . . , xn como en las variables y0 , . . . , ym del mismo
grado con respecto a los dos sistemas de variables. De esta observación se sigue que PY ×Z (d) =
PY (d) · PZ (d). En particular, como dim Y = r y dim Z = s, tenemos
pa (Y × Z) = (−1)r+s (PY ×Z (0) − 1) = (−1)r+s (PY (0)PZ (0) − 1)
= (−1)r (−1)s [PY (0)PZ (0) − PY (0) − PZ (0) + 1 + PY (0) − 1 + PZ (0) − 1]
= (−1)r [PY (0) − 1](−1)s [PZ (0) − 1] + (−1)s+r [PY (0) − 1] + (−1)r+s [PZ (0) − 1]
= pa (Y )pa (Z) + (−1)s pa (Y ) + (−1)r pa (Z).
Esto es lo que se querı́a demostrar.
92
5.1. El Polinomio de Hilbert y el grado de un conjunto algebraico
5. Intersecciones en el Espacio Proyectivo
Hemos llegado a nuestro resultado principal acerca de la intersección de una variedad proyectiva con una hipersuperficie, que es una generalización parcial del teorema de Bézout a espacios
proyectivos de dimensiones altas. Sea Y ⊆ Pn una variedad proyectiva de dimensión r. Sea H una
hipersuperficie que no contenga Y . Entonces por (5.2), Y ∩ H = Z1 ∪ · · · ∪ Zs , donde ∀ j, Zj es
una variedad de dimensión r − 1. Sea pj el ideal primo homogéneo de Zj . Definimos la multiplicidad de intersección de Y y H a través de Zj como i(Y, H; Zj ) = µpj (S/(IY + IH )). Aquı́ IY e
IH son los ideales homogéneos de Y y H. El anulador del módulo M = S/(IY + IH ) es IY + IH ,
y Z(IY + IH ) = Y ∩ H, por lo que pj es un ideal primo minimal de M , y µ es la multiplicidad
introducida anteriormente.
Teorema 5.7. Sea Y una variedad en Pn con dim Y ≥ 1, y sea H una hipersuperficie que no
contenga a Y . Sean Z1 , . . . , Zs las componentes irreducibles de Y ∩ H. Entonces
s
X
i(Y, H; Zj ) · deg Zj = (deg Y )(deg H).
j=1
Demostración. Supongamos que H está definida por un polinomio homogéneo f de grado d.
Consideremos la siguiente sucesión de S-módulos graduados
f
0 → (S/IY )(−d) → S/IY → M → 0,
donde M = S/(IY + IH ). Tomando polinomios de Hilbert, hallamos que
PM (z) = PY (z) − PY (z − d).
Nuestro resultado se obtiene al comparar los coeficientes lı́deres de ambos lados de esta ecuación.
Supongamos que dim Y = r y deg Y = e, entonces PY (z) = r!e z r + · · · , por lo que en el lado derecho
tenemos
he
i
e r
de
z + ··· −
(z − d)r + · · · =
z r−1 + · · · .
r!
r!
(r − 1)!
A continuación consideremos el módulo M . Por (5.4), M posee una
0 = M0 ⊂ M1 ⊂ · · · ⊂
Pfiltración
q
q
M = M , cuyos cocientes son de la forma (S/qi )(li ). Ası́ PM = i=1 Pi , donde Pi es el polinomio
de Hilbert de (S/qi )(li ). Si Z(qi ) es una variedad proyectiva de dimensión ri y grado fi , entonces
Pi = rfii! z ri + · · · . Note que la traslación li no afecta al coeficiente lı́der de Pi . Ya que solo estamos
interesados en el coeficiente lı́der de Pi , podemos ignorar aquellos Pi de grado menor a r − 1. Nos
quedamos solo con los Pi que están definidos por los ideales primos minimales qi de M : a saber uno
de los primos p1 , . . . , ps correspondientes a los Zj . Cada uno de ellos aparece µpj (M ) veces, ası́ que
el coeficiente lı́der de PM es
s
X
1
i(Y, H; Zj ) · deg Zj .
(r − 1)!
j=1
Al comparar con la relación anterior, tenemos el resultado.
∗
Corolario 5.8 (Teorema de Bézout). Sean Y y Z curvas distintas en P2 , con deg Y = d y
deg Z = e. Sea Y ∩ Z = {P1 , . . . , Ps }. Entonces
X
i(Y, Z; Pj ) = de.
Demostración. Sólo hay que notar que el polinomio de Hilbert de un punto es el polinomio 1, y
por lo tanto tiene grado 1.
∗
93
5.2. Códigos algebraicos de Evaluación
5. Intersecciones en el Espacio Proyectivo
5.2.– Códigos algebraicos de Evaluación
5.2.1.
Preliminares algebraicos
En esta sección enunciamos definiciones y resultados del álgebra conmutativa.
Denotaremos la función de Hilbert del anillo coordenado RX por H(RX , j) (o por HX (j)). Ya
que tenemos la siguiente sucesión exacta
0 → I → S → S/IX → 0
se sigue que H(RX , j) :=
k Sj −dimk IX (j), para todo j ∈ Z. La correspondiente serie de Hilbert
Pdim
∞
se define por FX (t) := j=0 HX (j)tj .
L∞
Sea IX =
r=γ IX (r), donde IX (r) 6= 0, de manera que γ sea el menor de los grados de los
componentes homogéneos no triviales del ideal IX . Existe un entero aX llamado el a-invariante de
RX (o el a-invariante del ideal IX , o hasta el a-invariante de X) tal que:
a) HX (j) = dimk Sj = j+n
⇔ j < γ;
n
b) HX (j) < HX (j + 1) < m para 0 ≤ j < aX ;
c) HX (j) = m para j > aX .
El número aX + 1 se llama el ı́ndice de regularidad de RX o IX . Sabemos que la serie de Hilbert
para un módulo es una función racional, i.e., es el cociente de dos polinomios con coeficientes enteros.
En nuestro caso la función de Hilbert tiene una expresión de la forma FX (t) = p(t)/(1 − t)1+n (Ver
[Eis95]).
El siguiente resultado sencillo es útil en situaciones prácticas para calcular el a-invariante de IX .
Proposición 5.9. Con la notación anterior, el a-invariante de IX es igual a deg p − (1 + n)
Demostración. Supongamos Card X = m, entonces, del comportamiento de la función de Hilbert
del ideal IX se sigue que
aX
∞
X
X
FX (t) =
HX (j)tj + mtaX +1
tj .
j=0
P∞
j=0
PaX
tj ,
Usando la igualdad 1/(1 − t) = j=0
vemos que FX (t) = j=0 HX (j)tj + mtaX +1 /(1 − t), donde
al sumar ambas partes no se altera el grado del polinomio del numerador, que es aX + 1, y al
p(t)
multiplicar tanto el numerador como el denominador por (1 − t)n , obtenemos que FX = (1−t)
1+n ,
donde deg p(t) = aX + 1 + n, y de esta manera se sigue el resultado.
∗
Recordamos que una resolución libre finita graduada (que abreviaremos como (GFFR), por sus
siglas en inglés) para RX es una sucesión exacta de S-módulos de la forma
M
M
0→
S(−αis )βis → · · · →
S(−αi1 )βi1 → S → RX → 0
donde αij ∈ Z, S(−αij ) ∼
= S con la graduación (S(−αij ))k = Sk−αij . Si conocemos una (GFFR)
para un A-módulo RX , el siguiente resultado es una consecuencia inmediata.
Proposición 5.10. Si d ∈ N, entonces
X
s
X n + d − αij n+d
j
dim k RX (d) =
+
(−1)
βij
.
d
d − αij
j=1
94
i
5.2. Códigos algebraicos de Evaluación
5. Intersecciones en el Espacio Proyectivo
A continuación recordamos el módulo canónico de RX . Es fácil ver que RX es un A-módulo
Cohen-Macaulay de dimensión 1. Esto significa que ∃ d > 0 tal que f ∈ Ad no es un divisor de cero
en RX . Podemos suponer que d = 1 y f = x0 , al trabajar, de ser necesario, sobre una extensión finita
adecuada de k . Sea Homk[x0 ] (RX , k[x0 ]) el RX -módulo graduado cuya componente homogénea de
grado d es el conjunto de todos los k[x0 ]-homomorfismos graduados ϕ tales que ϕ(RX (s)) ⊆ k[x0 ]s+d .
La estructura de RX -módulo sobre Homk[x0 ] (RX , k[x0 ]) esta dada por (rϕ)(t) = ϕ(rt) para todos
t, r ∈ RX . Definimos el módulo canónico de RX como:
ωRX = Homk[x0 ] (RX , k[x0 ])(−1).
Se puede demostrar ([DRTR01], página 457) que ωRX es isomorfo a
aM
X +1
(Homk[x0 ] (k[x0 ](−i), k[x0 ]))∆HX (i) (−1) ∼
=
i=0
aM
X +1
k[x0 ](i − 1)∆HX (i) ,
i=0
Por lo tanto, tenemos el siguiente resultado.
Proposición 5.11.
Para todo entero d ∈ Z se tiene que
HX (d) + HωR (−d) = Card X.
A continuación, decimos que un conjunto de puntos X ⊆ Pnk es una intersección completa (cero
dimensional) si el ideal IX es generado por una sucesión regular de elementos, i.e., existe un conjunto
de n generadores {f1 , . . . , fn } del ideal IX tal que fi no es un divisor de cero de S/ hf1 , . . . , fi−1 i,
para i = 1, . . . , n − 1. Si IX = hf1 , . . . fn i, con fi ∈ Sdi , decimos que X es una intersección completa
de multigrado d = (d1 , . . . , dn ).
La siguiente proposición nos da una GFFR de una intersección completa.
Proposición 5.12. Sea X una intersección completa de multigrado d = (d1 , . . . , dn ), entonces
una (GFFR) de RX es la siguiente:
0 → T (dn +· · ·+d1 ) → · · · T (di1 +· · ·+dik ) → · · · T (di1 +di2 +di3 ) → T (di1 +di2 ) → T (di ) → RX → 0,
donde T (di ) =
Ln
i=1 S(di )
y, en general, T (di1 + · · · + dik ) =
L
1≤i1 <···<ik
S(−
Pk
j=1 dij ).
Demostración. La resolución anterior es el complejo graduado de Koszul, y es una sucesión exacta
por que el ideal está generado por una sucesión regular.
∗
Como una consecuencia inmediata del resultado anterior tenemos
Corolario 5.13. Si X es una intersección completa de multigrado d = (d1 , . . . , dn ), entonces la
serie de Hilbert de IX es
"
#
X
X
1
1−
tdi1 +di2 +
tdi1 +di2 +di3 + · · · + (−1)n td1 +···+dn .
(1 − t)n+1
i1 <i2
i1 <i2 <i3
El siguiente resultado es una consecuencia inmediata del corolario anterior y de la Proposición 5.9.
Corolario 5.14. Si X es una intersección completa de multigrado d = (d1 , . . . , dn ), entonces
P
a) el a-invariante de IX es aX = ni=1 di − (1 + n);
95
5.2. Códigos algebraicos de Evaluación
5. Intersecciones en el Espacio Proyectivo
b) el Polinomio de Hilbert de IX es:
X
X n + d − (di + dj + dk )
n + d − (di + dj )
n+d
+ ···
+
HX (d) =
−
d − (di + dj + dk )
d − (di + dj )
d
i<j
i<j<k
Pn
di
n n+d−
i=1
P
.
+ (−1)
d − ni=1 di
Se puede dar una descripción más concreta del módulo canónico de una intersección completa
([DRTR01], página 459 [Eis95] página 519). Si IX = hf1 , . . . , fn i con multigrado d = (d1 , . . . , dn ),
entonces
!
n
X
ωR = R
di − (n + 1) .
i=1
Ası́, para todo entero m, la m-ésima componente homogénea de ωR es
P d −n−1−m.
(−m) = dimk (RP d −n−1−m ).
(ωR )−m = R
En particular, tenemos que HωR
i
i
A continuación expresaremos HωR en términos de HX , utilizando el teorema de la Dualidad de
Serre ([Har77], Capı́tulo 3, Sección 7, página 239 y [DRTR01], página 459).
Proposición 5.15. Con la notación anterior, sea aX el a-invariante de IX , entonces
HωR (−m) = HX (aX − m).
En particular,
HX (m) + HX (aX − m) = Card X
Demostración. La primera afirmación se sigue del Corolario 5.14 y de las observaciones anteriores.
La última afirmación se sigue de la Proposición 5.11.
∗
5.2.2.
Códigos
Primero introduciremos algo de notación. Sea k = GF(q) un campo finito con q elementos,
Ldonde
q es la potencia de un número primo p (la caracterı́stica del campo), sea S = k[x0 , . . . , xn ] = j≥0 Sj
el anillo de polinomios en las variables x0 , . . . , xn sobre el campo k con la graduación natural.
Transformamos el espacio k n en un espacio métrico utilizando la distancia de Hamming entre dos
vectores u = (u1 , . . . , un ) y v = (v1 , . . . , vn ) definida por
d(u, v) := Card {i = 1, . . . , n | ui − vi 6= 0}.
Sea Dr (v) el disco de radio r con centro en v ∈ k n . Un subconjunto C ⊂ k n es un código que
corrige al menos r errores si los discos Dr (v) con centros en v ∈ C son disjuntos. (Ası́, se pueden
corregir hasta r errores que sucedan en los elementos de C, llamados palabras código.) El número
dist C := min {d(u, v)}
u,v∈C
u6=v
se llama la distancia mı́nima de C y mide la capacidad del código para corregir errores, pues es
fácil ver que C corrige r errores si dist C ≥ 2r + 1.
96
5.2. Códigos algebraicos de Evaluación
5. Intersecciones en el Espacio Proyectivo
Un código lineal es un subespacio vectorial C ⊆ k n . En el caso particular de los códigos lineales
es relativamente fácil el calcular la distancia mı́nima de C, al menos en principio. El peso de una
palabra (denotado por wt) es el número de letras no cero en ella. La distancia entre dos palabras u
y v es igual al peso de su diferencia (en cualquier orden),
d(u, v) = wt (u − v) = wt (v − u).
Por lo tanto, en un código lineal, la distancia entre cualesquiera dos palabras distintas en C es igual
al peso de una palabra no cero en C. Recı́procamente, el peso de una palabra u distinta de cero es
la distancia de u a la palabra cero, la cual se halla en cualquier código lineal. Ası́ dist C resulta ser
el menor número de coordenadas distintas de cero de una palabra no cero del código.
Definimos también el código dual de un código lineal C a ser el conjunto
⊥
n
C := {(y1 , . . . , yn ) ∈ k |
n
X
yi xi = 0 ∀ (x1 , . . . , xn ) ∈ C}.
i=1
Cada elemento w en C ⊥ nos provee de una prueba para verificar si cierta palabra c está en C,
pues toda palabra en C debe ser ortogonal a w. Esto es llamado una verificación de paridad por
que, en el caso binario, esto verifica si hay un numero par de unos en c en las posiciones en las que
w tiene unos. Con los códigos lineales obtenemos dos códigos por el precio de uno.
Observación 5.1: No hay que confundir al código dual C ⊥ con un complemento ortogonal en el
sentido clásico de los R-espacios vectoriales. En el caso de un campo finito GF(q), los subespacios
C y C ⊥ pueden llegar intersecarse en algo más grande que el conjunto {0}, inclusive puede suceder
C = C ⊥ , en cuyo caso se dice que C es un código autodual.
El principal problema de la teorı́a de códigos correctores de errores lineales es construir dichos códigos de tal manera que tanto dist C como dimk C sean tan grandes como sea posible. A continuación
L
tomamos X = {P1 , . . . , Pm } ⊆ Pnk un conjunto finito de puntos,L
denotaremos por IX = j≥0 IX (j)
al ideal graduado I(X) en S, y denotaremos por RX = S/IX = j≥0 Sj /IX (j) al anillo coordenado
de X.
Para d ∈ N, consideramos el mapeo de evaluación ev : Sd −→ k m en el conjunto X =
{P1 , . . . , Pm } ⊆ Pn , definido por ev(fL
) = (f (P1 ), . . . , f (Pm )). Éste mapeo es k-lineal y define el código k-lineal CX (d) = Im ev. Si IX = j≥0 IX (j) ⊆ S es el ideal de X, es fácil ver que Ker ev = IX
y ası́ CX (d) ∼
= Sd /IX (d). En particular, la longitud de CX (d) es Card X = m y su dimensión
está dada por HX (d), el polinomio de Hilbert de IX .
Ahora podemos aplicar la construcción anterior del código CX (d) al caso en el que X es una
intersección completa. Aquı́ tenemos que IX = hf1 , . . . , fn i, donde {f1 , . . . , fn } es una sucesión
regular, con multigrado d = (d1 , . . . , dn ). Sea aX = d1 + · · · + dn − (n + 1) el a-invariante de IX .
Para un entero d tal que 0 ≤ d ≤ aX el código k-lineal CX (d) definido anteriormente se denotará por
RM(X, d) y se llamará el Código de Reed-Muller en X.
Teorema 5.16. Sea X una intersección completa y d un entero tal que 0 ≤ d ≤ aX . Entonces
el código Reed-Muller RM(X, d) tiene longitud Card X = d1 d2 · · · dn , y su dimensión está dada
por el polinomio de Hilbert HX (d).
Demostración. Probaremos el siguiente resultado general. Sea {Fi } una sucesión regular de polinomios homogéneos de grados di en A, donde i ∈ {1, . . . , t}, y t ≤ n y sea Rt = A/ hF1 , . . . , Ft i.
97
5.2. Códigos algebraicos de Evaluación
5. Intersecciones en el Espacio Proyectivo
d1 ···dt n−t
Entonces el polinomio de Hilbert de Rt es de la forma Pt (z) = (n−t)!
z +Q(z), donde deg Q < n−t.
Para demostrarlo procederemos por inducción sobre t. Para t = 1, tenemos la sucesión exacta
0 → A(−d1 ) → A → R1 → 0
donde el primer mapeo
la
de
está definido por 1 7→ F1 . Por lo tanto
función
Hilbert en grado
d+n−d1
z+n
z+n−d1
d es d+n
−
,
por
lo
que
el
polinomio
de
Hilbert
es
−
, es decir, P1 (z) =
n
n
n+
n
d1
n−1
+ Q1 (z), donde deg Q1 < n − 1. Suponemos que este resultado se cumple para t − 1,
(n−1)! z
ahora consideremos la siguiente sucesión regular para t
F
0 → Rt−1 (−dt ) →t Rt−1 → Rt → 0
donde el primer mapeo es la multiplicación por Ft , el cual es inyectivo por que F1 , . . . , Ft forman una
d1 ···dt−1 n−(t−1)
sucesión regular. De lo anterior obtenemos que Pt (z) = Pt−1 (z) − Pt−1 (z − dt ) = (n−(t−1))!
z
+
d1 ···dt−1
(z − dt )n−(t−1) + R2 (z − dt ), donde deg R1 , deg R2 < n − (t − 1), por lo que se sigue
R1 (z) − (n−(t−1))!
el resultado. Por supuesto que éste resultado también se cumple cuando t = n. Ya que RM(X, d) es
isomorfo a Ad /IX (d), su dimensión es HX (d), del cual tenemos una expresión explı́cita del Corolario
5.14.
∗
α Teorema 5.17. Con la notación anterior, el código dual de RM(X, aX ) es unidimensional.
∗
Demostración. Ver [DRTR01], página 460.
5.2.3.
Algunos ejemplos
En esta sección damos algunos ejemplos de conjuntos en espacios proyectivos (sobre campos
finitos) que son intersecciones completas, y después de ello damos los correspondientes códigos de
Reed-Muller. Los siguientes tres ejemplos son de curvas inmersas en P2 cuyos puntos racionales sobre
el campo correspondiente forman una Intersección Completa (para leer más al respecto, consulte
[DRTR01], página 461).
5.2 Ejemplo (La lı́nea Proyectiva): Sea k = GF (q), y tomamos los polinomios f1 (x, y, z) = z
y f2 (x, y, z) = xq y − xy q . Entonces el subconjunto X = {(1, a, 0) | a ∈ k} ∪ {(0, 1, 0)} es tal que
IX = hf1 , f2 i, en el cual el multigrado es d = (1, q + 1). El a-invariante es q − 1.
5.3 Ejemplo (La cuártica de Klein): Sea k = GF (8) y f1 (x, y, z) = x2 y+y 3 z+z 3 x, f2 (x, y, z) =
x5 z + y 5 x + z 5 y + x2 y 2 z 2 . Se puede demostrar que el conjunto X de los puntos k-racionales de la
cuártica de Klein tiene las siguientes caracterı́sticas: IX = hf1 , f2 i, con multigrado d = (4, 6),
Card X = 24 y a-invariante igual a 7.
5.4 Ejemplo (Curva Hermitiana): Sea k =GF(r2 ) y sean f1 (x, y, z) = xr+1 + y r+1 + z r+1 ,
2
2
f2 = z(xr y − xy r )/(xr y − xy r ). Entonces el conjunto de los puntos k-racionales de la curva
Hermitiana cumple IX = hf1 , f2 i, con multigrado d = (r + 1, r2 − r + 1). Observe que el polinomio
f2 es el producto de aquellas lı́neas que pasan a través del punto [0 : 0 : 1] que contienen r + 1
puntos, y de la lı́nea z = 0 que pasa a través de los r + 1 puntos restantes.
Notemos que en estos tres ejemplos el a-invariante es igual a q−1, donde q es el número de elementos
del campo de definición. También cabe mencionar que el conjunto de todos los puntos racionales en
el espacio proyectivo de dimensión mayor que uno no define una intersección completa, por lo que
el Ejemplo 5.2 no se puede generalizar.
98
Conclusiones
“En toute science, quand nous l’entendons non comme un instrument de pouvoir et
de domination, mais comme aventure de connaissance de notre espèce à travers les
âges, n’est autre chose que cette harmonie, plus ou moins vaste et plus ou moins
riche d’une époque à l’autre, qui se déploie au cours des générations et des siècles,
par le délicat contrepoint de tous les thèmes apparus tour à tour, comme appelés du
néant.”1 .
–Alexandre Grothendieck
El principal objetivo de este trabajo fue estudiar a las variedades algebraicas desde dos puntos de
vista: en el primero (llevado a cabo en los capı́tulos 1 y 2) las consideramos como objetos aislados
y las clasificamos en dos grandes grupos: afines y proyectivas. Vimos las diferentes propiedades
topológicas de nuestros espacios de trabajo (An y Pn , los cuales resultaron ser espacios topológicos
noetherianos irreducibles de dimensión finita) y en base a estas propiedades fuimos construyendo
nuestros ejemplos, siempre con el objetivo de ganar intuición y hacer más claras las ideas.
Gracias a distintos resultados auxiliares fuimos capaces de descubrir las siguientes conexiones
entre el Álgebra y la Geometrı́a en el espacio afı́n:
V es :
∅
An
Un punto (a1 , . . . , an )
Irreducible
Un conjunto algebraico
Una hipersuperficie
I(V ) es
A
{0}
maximal hx1 − a1 , . . . , xn − an i
primo
radical
principal no nulo
A(V ) es
{0}
A
Un campo
dominio entero
k-álgebra reducida f.g
−
Dimensión
−
n
0
−
−
n−1
Sin embargo no es posible ofrecer una tabla tan clara en el caso proyectivo, pero con algunos
cambios técnicos pudimos trasladar muchos de los resultados obtenidos previamente en variedades
afines.
En los capı́tulos 3 y 4 viramos hacı́a el segundo punto de vista, en el cual unificamos nuestra
definición de variedad y comenzamos a estudiar las formas de viajar de un objeto a otro; para ello
construimos distintas nociones de morfismo y concretamente formamos dos categorı́as de objetos
geométricos que caracterizamos completamente en términos de categorı́as de objetos algebraicos.
Este es el espı́ritu interdisciplinario, interrelacional y global de la Geometrı́a Algebraica moderna.
Las caracterizaciones obtenidas fueron las siguientes:
1. El funtor contravariante X 7→ A(X) induce una antiequivalencia de categorı́as entre la categorı́a de las variedades afines sobre k y la categorı́a de los dominios enteros finitamente
generados sobre k (Corolario 3.10).
1
Texto extraı́do de [Jac04]
99
5. Intersecciones en el EspacioConclusiones
Proyectivo
5.2. Códigos algebraicos de Evaluación
2. El funtor contravariante X 7→ K(X) induce una antiequivalencia de categorı́as entre la categorı́a de las variedades y los mapeos racionales con la categorı́a de las extensiones de campos
de k que son finitamente generadas (Teorema 4.4).
Cabe mencionar que el uso de este lenguaje fue muy fructı́fero, pues además de haber justificado
la inserción de varios ejemplos y temas de los capı́tulos 1 y 2 (v.g., las inmersiones de Veronese y
de Segre), nos permitieron aclarar el significado de los mismos y definir conceptos nuevos, como los
productos de variedades.
El uso de categorı́as inevitablemente lleva ligada la noción de isomorfismo o igualdad de objetos;
con ello también arrivamos al problema central de la clasificación de las variedades desde distintos
puntos de vista. Aquı́ hemos empleado dos: Isomorfismo y Equivalencia Birracional. Con ejemplos
vimos que la segunda relación es más amplia, en el sentido de que cualesquiera dos variedades
isomorfas son birracionalmente equivalentes, pero el recı́proco de este enunciado no es cierto.
Hubo un tema que estuvo presente a lo largo de todo el trabajo, pero que pudo haber pasado
desapercibido: la teorı́a de la intersección. Hacı́a la parte final del trabajo decidimos dedicarle un
capı́tulo para hacer notar la versatilidad de la disciplina, para incluir una sección donde se abordan
aplicaciones de la misma a la construcción de códigos detectores-correctores de erroes, el cual es un
campo en el que Geometrı́a Algebraica tiene un papel destacado.
Ahora pasemos a comentar sobre lo que se asoma en el horizonte. Hay buenas razones para
trabajar sobre campos que no son algebraicamente cerrados, una de ellas es que muchos problemas
en Geometrı́a Algebraica son motivados por la teorı́a de numeros, en la cual estamos principalmente interesados en la resolución de ecuaciones sobre campos finitos o campos numéricos. Algunas
personas como Zariski, Weil y Nagata han trabajado ya sobre campos que no son algebraicamente
cerrados e inclusive sobre dominios de Dedekind.
Otra dirección en la cual podemos expandir nuestros fundamentos es el definir un cierto tipo
de variedad abstracta que no venga acompañada a priori de una inmersión en algún espacio afı́n o
proyectivo. Esto es especialmente necesario en problemas como el de la construcción de una variedad
de moduli. El problema moduli es a grosso modo hallar un objeto geométrico que parametrize a una
familia de objetos que comparten ciertos invariantes o caracterı́sticas, y que al mismo tiempo refleje
la estructura de estos objetos vistos no como entidades discretas o separadas, sino como un todo.
Como objetos geométricos que son, podemos hablar de una variedad de moduli, la cual deberı́amos
ser capaces de construir de manera local, sin saber nada acerca de una inmersión global.
Se ha visto que la fructı́fera idea de los esquemas (debida a Alexandre Grothendieck) generaliza correctamente el concepto de variedad cuasi-proyectiva que desarrollamos en este trabajo. Él
comienza de la observación de que una variedad afı́n corresponde a un dominio entero finitamente
generado sobre un campo. Pero, ¿Por qué restringirnos solamente a este tipo tan particular de anillos? De esta manera, para cualquier anillo conmutativo A, él define un espacio topológico Spec A,
y una gavilla de anillos sobre Spec A, la cual generaliza el anillo de funciones regulares sobre una
variedad afı́n, llamándole a todo esto un esquema afı́n. Después se define un esquema arbitrario al
pegar o unir esquemas afines, generalizando ası́ la noción de variedad abstracta sugerida anteriormente. Sugerimos ampliamente el Capı́tulo II del libro de Hartshorne [Har77], en el cual desarrolla
los fundamentos de la Geometrı́a Algebraica utilizando el lenguaje de los esquemas.
100
Apéndice A
Tópicos en Álgebra
En esta parte presentamos los conceptos y resultados más especializados a los que recurrimos
en este trabajo y, que de introducirlos al momento de utilizarlos, nos distraerı́an demasiado
del tema actual en discusión.
A.1.– Álgebra Conmutativa
Álgebras. Sea A un anillo. Una A−álgebra es un anillo B junto con un homomorfismo entre los
anillos ψB : A −→ B. Un homomorfismo de A-álgebras B −→ C es un homomorfismo entre los
anillos ϕ : B −→ C tal que el siguiente diagrama es conmutativo
ψB
/B
@@
@@
ϕ
ψC @@ A@
C
Una A-álgebra B es finitamente generada si existen a1 , . . . , an ∈ B tales que ∀α ∈ B ∃ f ∈
R[x1 , . . . , xn ] : α = f (a1 , . . . , an ). Si X ⊆ B, entonces la A-subálgebra generada por X es la
intersección de todas las A-subálgebras de B que contienen a X, y es la mı́nima A-subálgebra que
contiene a X. Consiste de todos los elementos de B que se pueden escribir como polinomios en
elementos de X con coeficientes en A.
Descomposición Primaria. Una descomposición primaria de un ideal a en un anillo A es una
expresión de a como una intersección finita de ideales primarios a = ∩ni=1 qi . Si además se cumple
√
que (i ) los ideales primos asociados pi = qi son todos distintos, e (ii ) se tiene que ∀ i : qi )
∩j6=i qj , entonces la descomposición primaria se dice que es minimal. Se puede demostrar que toda
descomposición primaria se puede reducir a una minimal. Se dirá que a es descomponible si tiene
una descomposición primaria.
Definición: Sea R un anillo, un R-módulo libre es un módulo que es isomorfo (como módulo)
a una suma directa de copias del anillo R. Si M es un R-módulo libre finitamente generado, i.e.
∃n∈N : M ∼
= Rn , entonces el número n es un invariante de M y se llama el rango de M .
Sucesiones exactas. Una sucesión de A-módulos y A-homomorfismos
fi+1
fi
· · · −→ Mi−1 −→ Mi −→ Mi+1 −→ · · ·
se dice que es una sucesión exacta en Mi si Im fi = Ker fi+1 . La sucesión es exacta si es exacta en
f
g
cada Mi . En particular, la sucesión 0 → M 0 → M → M 00 → 0 es exacta si, y sólo si, f es inyectiva
y g es suprayectiva y Ker g = Im f . Una sucesión de este tipo se denomina sucesión exacta corta.
101
A.2. Categorı́as
A. Tópicos en Álgebra
Sea C una clase de A-módulos y λ : C −→ Z. La función λ es aditiva si, para cada sucesión
f
g
exacta corta 0 → M 0 → M → M 00 → 0, se tiene λ(M 0 ) − λ(M ) + λ(M 00 ) = 0.
Sucesiones regulares. Anillos y Módulos Cohen-Macaulay. Sea M un A-módulo. Una sucesión
{a1 , . . . , am } de elementos de A es una sucesión M -regular si ∀ i ∈ {0, . . . , m − 1}, ai+1 no es un
divisor de cero de M/ ha1 , . . . , ai i.
Dependencia Entera. Los elementos enteros sobre un anillo son el equivalente a los elementos
algebraicos sobre un campo.
Sea A un anillo, B un subanillo de A (con 1 ∈ B). Un elemento α ∈ A se dice entero sobre B
si ∃ f ∈ A[x] mónico tal que f (α) = 0. El conjunto C de todos los elementos de A que son enteros
sobre B forman un subanillo de A llamado la cerradura entera de B en A.
Extensiones de Campos. Sea k un campo. Una extensión de k es un campo F que contiene a k como
subcampo (se representa por F/k). Bajo estas condiciones, F es un k-espacio vectorial de manera
natural, la extensión se dice de dimensión finita si dimk F < ∞; en caso contrario la extensión se
dice que es de dimensión infinita.
Sea F/k una extensión de campos, un elemento u ∈ F se dice algebraico sobre k si ∃ f ∈
k[x], f 6= 0 tal que f (u) = 0. Si dado cualquier polinomio no nulo f ∈ k[x] se tiene que f (u) 6= 0,
entonces se dice que u es trascendental sobre k. F/k es una extensión algebraica si todo elemento
de F es algebraico sobre k. F es una extensión trascendental si al menos un elemento de F es
trascendental sobre k.
Sea k un campo y f ∈ k[x] un polinomio irreducible, entonces se dice que f es separable si
en algún campo de descomposición de f sobre k toda raı́z de f tiene multiplicidad 1. Si F/k es
una extensión de campos y u ∈ F es algebraico sobre k, entonces u se dice separable sobre k si su
polinomio irreducible es separable. Si todo elemento de F es separable sobre k, entonces F es una
extensión separable de k.
Estudiaremos a continuación los conceptos de independencia algebraica y base de trascendencia,
que son fundamentales en la geometrı́a algebraica, y están ligadas esencialmente a la noción de
dimensión.
Sea F/k una extensión de campos y S ⊆ F . Se dice que S es algebraicamente dependiente sobre
k si para algún n ∈ N ∃ f ∈ k[x1 , . . . , xn ] no cero tal que f (s1 , . . . , sn ) = 0 para distintos s1 , . . . , sn ∈
S. Si S no es algebraicamente dependiente sobre k, entonces se dice que S es algebraicamente
independiente sobre k.
Sea F/k una extensión de campos. Una base de trascendencia de F sobre k es un subconjunto S ⊆ F el cual es algebraicamente independiente sobre k y es maximal (con respecto a la
inclusión de conjuntos) en el conjunto de subconjuntos algebraicamente independientes de F . El
grado de trascendencia de la extensión F/k (denotado por tr.d.F/k) es el número cardinal Card S
de cualquier base de trascendencia S.
A.2.– Categorı́as
Definición: Una categorı́a es una clase C de objetos junto con
una clase de conjuntos disjuntos, denotados hom (A, B), uno para cada par de objetos en C ;
(un elemento f ∈ hom (A, B) se llama morfismo de A a B y es denotado por f : A −→ B);
para cada trio (A, B, C) de objetos en C una función
hom (B, C) × hom (A, B) −→ hom (A, C);
102
A.2. Categorı́as
A. Tópicos en Álgebra
donde para morfismos f : A −→ B y g : B −→ C, esta función se escribe (g, f ) 7→ g ◦ f y
el morfismo resultante g ◦ f : A −→ C se llama la composición de f y g; todos sujetos a los
siguientes dos axiomas:
• Asociatividad. Si f : A −→ B, g : B −→ C y h : C −→ D son morfismos de C , entonces
h ◦ (g ◦ f ) = (h ◦ g) ◦ f .
• Identidad. Para todo objeto B de C existe un morfismo 1B : B −→ B tal que para todo
f : A −→ B, g : B −→ C, se cumple
1B ◦ f = f
y
g ◦ 1B = g
En una categorı́a C un morfismo f : A −→ B se dice una equivalencia si existe en C un morfismo g :
B −→ A tal que g ◦ f = 1A y f ◦ g = 1B . La composición de dos equivalencias (cuando está definida)
es una equivalencia. Si f : A −→ B es una equivalencia, A y B se dicen ser equivalentes.
Definición: Sea C una categorı́a y {Ai }i∈I una familia de objetos de C . Un producto para la
familia {Ai }i∈I es un objeto P de C junto con una familia de morfismos {πi : P −→ Ai }i∈I tal que
para todo objeto B y cualquier familia de morfismos {ϕi : B −→ Ai }i∈I , existe un único morfismo
ψ : B −→ P tal que ∀i ∈ I , el siguiente diagrama es conmutativo:
πi
/ Ai
>
}
}
}
}}ϕ
}}
PO
∃ !ψ
B
Definición: Un objeto I en una categorı́a C se dice universal (o inicial) si para todo objeto C de
C , el conjunto hom (I, C) consta de un solo elemento. Un objeto T de C se dice couniversal (o
final) si para todo objeto C de C , el conjunto hom (C, T ) consta de un solo elemento.
Teorema A.1. Cualesquiera dos objetos universales [respectivamente couniversales] en una categorı́a C son equivalentes.
Demostración. Véase [Hun74], página 57.
Productos Tensoriales de Módulos. Sea R un anillo (conmutativo con identidad como siempre),
M y N dos R-módulos. Entonces existe un R-módulo T y un mapeo bilineal ψ : M × N −→ T tal
que para todo R-módulo P y para toda función bilineal f : M × N −→ P existe un único mapeo
lineal f 0 : T −→ P tal que el siguiente diagrama es conmutativo
M ×N
HH
ψ
/T
HH f
HH
0
HH ∃ !f
H# P
El R-módulo T se llama el producto tensorial de M y N , y se denota por M ⊗R N . Vemos que ψ
es un objeto universal en la categorı́a de todas las funciones bilineales en M × N .
Proposición A.2. Sean R y S dos anillos, I un ideal de R, M un R-módulo, P un S-módulo y
N un (R, S)-bimódulo (i.e., N es a la vez un R-módulo y un S-módulo, y las dos estructuras don
compatibles en el sentido de que ∀ r ∈ R, s ∈ S, x ∈ N : a(xb) = (ax)b). Entonces se cumple lo
siguiente:
103
A.2. Categorı́as
A. Tópicos en Álgebra
a) R ⊗R M ∼
= M,
b) M/IM ∼
= R/I ⊗R M ,
c) (M ⊗R N ) ⊗S P ∼
= M ⊗R (N ⊗S P ).
Demostración.
a) Definimos ψ : R × M −→ M por ψ(r, x) := rx, es claro que ψ es una función bilineal. Sea T
cualquier R-módulo y f : M × N −→ T cualquier función bilineal, es claro que ∀ r ∈ R, x ∈ M :
f (r, x) = f (1, rx), luego, si definimos f 0 = f (1, ·), es claro que es el único mapeo lineal tal que
f = f 0 ◦ ψ.
b) Ver [AM69], página 31.
c) Ver [AM69], página 27.
Definición: Sean C , D dos categorı́as. Un funtor covariante T de C a D (denotado por T : C −→
D) consta de un par de funciones (ambas denotadas por T ), una función objeto que a cada objeto C
de C le asigna un objeto T (C) en D, y una función morfismo que a cada morfismo f ∈ HomC (C, M )
le asigna un morfismo T (f ) ∈ HomD (T (C), T (M )) tal que
1. para todo morfismo identidad 1C de C , se tiene que T (1C ) = 1TC ;
2. para cualesquiera morfismos f, g cuya composición esté definida, se tiene que T (g ◦ f ) =
T (g) ◦ T (f ).
Definición: Sean C , D dos categorı́as. Un funtor contravariante S : C −→ D consta de un par
de funciones (ambas denotadas por S), una función objeto que a cada objeto C de C le asigna un
objeto S(C) en D, y una función morfismo que a cada morfismo f ∈ HomC (C, M ) le asigna un
morfismo S(f ) ∈ HomD (S(M ), S(C)) tal que
1. para todo morfismo identidad 1C de C , se tiene que S(1C ) = 1SC ;
2. para cualesquiera morfismos f, g cuya composición esté definida, se tiene que S(g ◦ f ) =
S(f ) ◦ S(g).
Observemos que la función morfismo de un funtor contravariante S : C −→ D invierte la dirección
de los morfismos.
Algunas caracterı́sticas interesantes de los funtores son las siguientes:
Definición: Sea F : C −→ D un funtor, F se dice pleno si para cada morfismo f : F (A) −→ F (B)
en HomD (F (A), F (B)) existe g ∈ HomC (A, B) tal que F (g) = f . El funtor se dice fiel si el mapeo
F : HomC (A, B) −→ HomD (F (A), F (B)) es inyectivo para cada A, B ∈ Ob C . Por último, el funtor
se dice denso si para todo D ∈ Ob D existe C ∈ Ob C tal que F (C) ∼
= D.
Sea (I, ≤) un conjunto parcialmente ordenado . Sea {πij : Ai −→ Aj | i ≤ j} una familia de
morfismos en C indexados por ≤ tales que si i = j, entonces πii = 1Ai y si i ≤ j ≤ k, entonces
πjk ◦πij = πik . Dicha familia se llama un sistema dirigido indexado por I. El objeto A junto con una
familia de morfismos {πi : Ai −→ A | i ∈ I} se llama el colı́mite de la familia, escrito A = limI Ai
−→
si todo diagrama de la forma
Ai @
πij
@@
@@
πi @@@
A
/ Aj
~
πj ~
~
~~
~~~
104
A.2. Categorı́as
A. Tópicos en Álgebra
conmuta, y si para todo objeto B ∈ C y para toda familia de objetos {ϕi : Ai −→ B} tal que todos
los diagramas de la forma
Ai @
πij
@@
@@
ϕi @@@
B
/ Aj
~
ϕj ~
~
~~
~
~~
es conmutativo, entonces existe un único morfismo ψ : A −→ B tal que el siguiente diagrama
πij
/ Aj
00@@@ πi
~
πj ~ 00 @@
~~ 00 @@ ~~~~ 0
ϕ
ϕi 00 A
j
00
0ψ0 0 Ai0 @
B
es conmutativo. Si I es un conjunto dirigido, entonces lim Ai es llamado el lı́mite directo de la
−→
familia {Ai }i∈I .
105
A.2. Categorı́as
A. Tópicos en Álgebra
106
Índice de figuras
1.1. Curvas algebraicas de grado 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Descomposición en componentes irreducibles de un conjunto algebraico . . . . . . . .
1.3. La curva cúbica torcida afı́n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
15
19
2.1.
2.2.
2.3.
2.4.
2.5.
.
.
.
.
.
24
25
28
38
41
3.1. La curva afı́n Z(y 2 − x3 ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Tres variedades afines isomorfas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3. Proyección desde un punto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
60
64
4.1. Explosión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
Proyección desde un punto . . . . . . . . . . . . . .
La lı́nea y el plano proyectivos . . . . . . . . . . .
Conos afines y conos sobre variedades proyectivas.
Cerradura proyectiva de la parábola x21 = x2 en P2 .
La superficie cuádrica en P3 . . . . . . . . . . . . .
107
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Índice de figuras
Índice de figuras
108
Índice de Notación
Ank
k
k[x1 , . . . , xn ]
Z(f )
Y
hXi
√
a
I(Y )
N = {1, 2, . . .}
R
C
A(Y )
x
R∗
deg f
char k
GLn (k)
{Gα }α∈I
X −Y
Card X
dim X
ht p
coc B
Pn
AtB
[a0 : . . . : an ]
Sh
S(Y )
C(Y )
S+
T −1 S
Sp
dimk V
O(Y )
OP,Y
K(Y )
n-espacio afı́n sobre k, 1
un campo, 1
anillo de polinomios en n variables sobre k, 1
conjunto de ceros, 1
cerradura de un conjunto, 4
ideal generado por el conjunto X, 5
radical de un ideal, 5
ideal de un conjunto de puntos, 5
conjunto de los números naturales, 6
campo de los números reales, 7
campo de los números complejos, 7
anillo coordenado afı́n, 8
clase residual (de equivalencia), 8
conjunto de unidades del anillo R, 9
grado de un polinomio f ∈ R[x], 9
caracterı́stica del campo k, 10
Grupo General Lineal de orden n del campo k, 10
familia indexada por el conjunto I, 13
complemento relativo, 13
cardinalidad del conjunto X, 14
dimensión de un espacio topológico, 15
altura de un ideal primo, 17
campo de cocientes del dominio entero B, 17
n-espacio proyectivo, 24
unión disjunta de A y B, 24
coordenadas homogéneas de un punto en Pn , 24
conjunto de elementos homogéneos de S, 27
anillo coordenado homogéneo, 27
cono afı́n sobre la variedad proyectiva Y , 28
ideal maximal irrelevante, 29
localización en un sistema multiplicativo, 34
localización en un ideal primo, 34
dimensión del espacio vectorial V sobre el campo k, 43
anillo de funciones regulares en una variedad, 49
anillo local de un punto, 49
campo de funciones, 49
109
tr.d k 0 /k
S(p)
HomC (X, Y )
limI Ai
−→
gcd (a, b)
A⊗B
SLn (k)
a|b
n0
∆f
M (d)
Ann M
µp (M )
deg Y
pa (Y )
i(Y, H; Zj )
aX
ω RX
d = (d1 , . . . , dn )
GF(q)
d(u, v)
dist C
wt (u)
C⊥
ev
grado de trascendencia de una extensión de campos, 51
ver 53
conjunto de morfismos de X a Y en la categorı́a C , 54
lı́mite directo, 57
máximo común divisor de a y b, 60
producto tensorial de módulos (k-álgebras), 68
Grupo Especial Lineal de orden n sobre el campo k, 72
a divide a b, 78
n suficientemente grande, 88
función diferencia, 88
d-ésimo modulo torcido de M , 89
anulador del módulo M , 89
la multiplicidad de un S-módulo graduado en el ideal primo minimal p, 90
grado de una variedad proyectiva Y , 90
género aritmético de Y , 91
multiplicidad de intersección de Y y H a través de Zj , 93
a-invariante del anillo coordenado de X, 94
módulo canónico del anillo coordenado de X, 95
multigrado de una intersección completa cero dimensional X, 95
campo finito de q elementos, 96
distancia de Hamming entre u y v, 96
distancia mı́nima del código C, 96
peso de u, 97
código dual del código lineal C, 97
mapeo de evaluación, 97
110
Índice alfabético
ı́ndice de regularidad, 94
a-invariante, 94
altura, 17
anillo
coordenado
afı́n, 8
homogéneo, 27
de funciones regulares, 49
graduado, 25
reducido, 8
Bézout
teorema de, 93
código
autodual, 97
corrector de errores, 96
dual, 97
lineal, 97
campo
de funciones, 49
CCA, 12
CCD, 12
cerradura proyectiva, 32
Cohen-Macaulay, 102
colı́mite, 104
colineación, 67
componente irreducible, 14
condición de cadena ascendente, véase CCA
condición de cadena descendente, véase CCD
conjunto
algebraico, 2, 27
de ceros, 2, 26
cono afı́n, 28
sobre una variedad proyectiva, 28
Cremona
transformación plana de, 77
curva
afı́n plana, 7
cúbica torcida, 18
curva excepcional, 85
deshomogeneización de polinomios, 31
dimensión
de espacio topológico, 15
de Krull, 17
distancia mı́nima, 96
Eisenstein
criterio de, 5
equivalencia proyectiva, 67
espacio
afı́n, 1
proyectivo, 24
explosión, 84
en un punto, 84
extensión
de ideales, 68
Frobenius
mapeo de, 59
función
coordenada, 7
polinomial, 7
racional, 49
regular, 48
funtor
contravariante , 104
covariante, 104
denso, 104
fiel, 104
pleno, 104
género aritmético, 91
GFFR, 94
grado, 7, 90
graduación, 25
111
Índice alfabético
grupo
aditivo, 71
multiplicativo, 71
grupo algebraico, 70
Hamming
distancia de, 96
Hilbert
Basissatz, 2
función de, 90
Nullstellensatz, 6, 27
polinomio de, 90
serie de, 94
hiperplano, 42
hipersuperficie, 7
homogeneización
de ideales, 32
de polinomios, 31
ideal
homogéneo, 25
irrelevante, 27
intersección completa, 45
conjuntista, 45
intersección local completa, 22
isomorfismo
de variedades, 49
Krull
Hauptidealsatz, 20
lı́mite directo, 105
lı́nea
afı́n, 3
proyectiva, 24
Laurent
anillo de polinomios de, 10
localmente cerrado
subconjunto, 52
mapeo
birracional, 76
racional, 76
dominante, 76
morfismo
de variedades, 48
dominante, 73
multigrado, 95
multiplicidad, 90
Índice alfabético
normalización
de una variedad afı́n, 74
Nullstellensatz
afı́n, 6
homogéneo, 27
parametrización polinomial, 21
peso, 97
plano proyectivo, 24
polinomio Jacobiano, 61
polinomio numérico, 88
producto
de variedades afines, 68
punto al infinito, 23, 24
resolución libre finita graduada, véase GFFR
Segre
inmersión de, 39
sistema dirigido, 104
subconjunto abierto principal, 79
subvariedad, 52
sucesión regular, 102
superficie, 7
reglada, 40
Topologı́a de Zariski
de una variedad afı́n, 2
de una variedad proyectiva, 27
topologia
cofinita, 3
producto, 3
transformación
cuadrática, 77
transformación estricta, 85
variedad, 48
afı́n, 4
cuasi-afı́n, 4
cuasi-proyectiva, 27
determinantal, 39
lineal, 43
normal, 72
proyectiva, 27
verificación de paridad, 97
Veronese
inmersión de, 36
112
Bibliografı́a
[AM69]
M. F. Atiyah and I. G. Macdonald, Introduction to Commutative Algebra, Addison –
Wesley, Massachusetts, 1969.
[CLO97]
D. Cox, J. Little, and D. O’Shea, Ideals, Varieties and Algorithms, second ed., Undergraduate Texts in Mathematics, Springer-Verlag, Heidelberg, Alemania, 1997.
[Die72]
J. Dieudonne, The Historical Development of Algebraic Geometry, The American Mathematical Monthly 79 (1972), no. 8, 827–866.
[DRTR01] I. M. Duursma, C. Renteria, and H. Tapia-Recillas, Reed-Muller Codes on Complete Intersections, Applicable Algebra in Engineering, Communication and Computing
AAECC, Springer Verlag 11 (2001), no. 6, 455–462.
[Eis95]
D. Eisenbud, Commutative Algebra with a View Toward Algebraic Geometry, first ed.,
Graduate Texts in Mathematics, vol. 150, Springer-Verlag, Heidelberg, Alemania, 1995.
[GOZ+ 05] C.E. Garay, M. Ortiz, R. Zuazua, et al., Categorias para estudiantes, En revision (2005).
[Har77]
R. Hartshorne, Algebraic Geometry, Graduate Texts in Mathematics, vol. 52, SpringerVerlag, Heidelberg, Alemania, 1977.
[Har92]
J. Harris, Algebraic Geometry. A First Course, Graduate Texts in Mathematics, vol.
133, Springer-Verlag, Heidelberg, Alemania, 1992.
[HK73]
K. Hoffman and R. Kunze, Linear Algebra, Prentice Hall, USA, 1973.
[Hun74]
T. Hungerford, Algebra, Graduate Texts in Matematics, vol. 73, Springer-Verlag, Heidelberg, Alemania, 1974.
[Jac04]
A. Jackson, Comme Appelé du Néant – As If Summoned from the Void: The Life of
Alexandre Grothendieck, Notices of the AMS 51 (2004), no. 4, 1038–1056.
[Kun85]
E. Kunz, Introduction to Commutative Algebra and Algebraic Geometry, Birkhäuser,
Boston, USA, 1985.
[Lan58]
S. Lang, Introduction to Algebraic Geometry, Interscience tracts in pure and applied
mathematics, Interscience Publishers, Inc., Nueva York, 1958.
[Mat89]
H. Matsumura, Commutative Ring Theory, Cambridge studies in advanced mathematics,
vol. 8, Cambridge University Press, Cambridge, Gran Bretaña, 1989.
[S+ 00]
K. Smith et al., An Invitation to Algebraic Geometry, Universitext, Springer-Verlag,
Heidelberg, Alemania, 2000.
113
Bibliografı́a
Bibliografı́a
[Sha74]
I. R. Shafarevich, Basic Algebraic Geometry, Die Grundlehren der mathematischen Wissenschaften, Springer-Verlag, Heidelberg, Alemania, 1974.
[vL99]
J. H. van Lint, Introduction to Coding Theory, third ed., Graduate Texts in Mathematics,
vol. 86, Springer-Verlag, Heidelberg, Alemania, 1999.
[ZS58]
O. Zariski and P. Samuel, Commutative Algebra (Volume i & ii), Graduate Texts in
Mathematics, vol. 28, Springer-Verlag, Heidelberg, Alemania, 1958.
114