Informe Nº 1 FUNDAMENTOS DEL CONTROL ACTIVO ACUSTICO
Anuncio

PROGRAMA NACIONAL DE I+D EN MEDIO AMBIENTE
Proyecto AMB99-1095-C02-01
Control activo acústico estructural del ruido de baja frecuencia en el
interior de medios de transporte
Informe Nº 1
FUNDAMENTOS DEL CONTROL ACTIVO ACUSTICO
ESTRUCTURAL
Febrero 2000
Pedro Cobo Parra
Instituto de Acústica. CSIC.
Serrano 144. 28006 Madrid
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
CONTENIDO
1. INTRODUCCION ……………………………………………………………..
2
2. SENSORES Y ACTUADORES PARA EL CAAE ………………………...
6
2.1. Materiales piezoeléctricos …………………………………………..
7
2.2. Materiales electroestrictivos ………………………………………..
25
2.3. Materiales magnetoestrictivos ……………………………………...
27
2.4. Aleaciones con memoria de forma ………………………………...
28
2.5. Fluidos electroreológicos …………………………………………...
31
3. MECANISMOS DE CONTROL ……………………………………………..
32
4. CAAE EN BARRAS. MODELO 1D ………………………………………...
40
5. CAAE EN PLACAS. MODELO 2D ………………………………………...
72
6. RESUMEN Y CONCLUSIONES .............................................................
113
REFERENCIAS ………………………………………………………………….
118
-1-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
1. INTRODUCCION
El ruido es una de las fuentes de contaminación ambiental. El control
del ruido es un problema tecnológico de cierta envergadura, por la
complejidad temporal, espacial y frecuencial que presenta. El ruido es
un subproducto de la generación de potencia. Los motores de los
vehículos, aviones, trenes, y en general, de los medios de transporte,
producen
ruido.
Las
plantas
de
producción
eléctrica,
los
transformadores eléctricos, los sistemas de ventilación, calefacción y
aire acondicionado producen ruido. El avance de los sistemas de
generación de energía está asociado con el progreso social y
económico. Paradójicamente, el incremento de los niveles de ruido
está inevitablemente asociado con el progreso social y económico.
Los niveles de ruido máximos que
pueden ser permitidos suelen
estar regulados a nivel municipal, regional, nacional y europeo.
El ruido puede controlarse por métodos pasivos y/o activos. Los
métodos pasivos se encuentran en un estado muy maduro y ofrecen
soluciones efectivas a frecuencias medias y altas, con un coste no
excesivamente elevado. Sin embargo, a frecuencias bajas, la solución
pasiva es casi siempre inaceptable, debido a sus dimensiones y/o
peso. El ruido urbano es rico en componentes de baja frecuencia. El
tráfico rodado y aéreo, la maquinaria industrial, y la maquinaria
basada en el movimiento de aire (turbinas, compresores, y los
sistemas de ventilación y aire acondicionado) son fuentes de ruido de
baja frecuencia. Los efectos del ruido de baja frecuencia son
especialmente nocivos debido a su persistencia, a su eficiente
propagación, y su capacidad de penetración (poca eficacia del control
pasivo en baja frecuencia). Los ruidos intensos de baja frecuencia
parecen producir síntomas claros en el sistema respiratorio y auditivo.
Existe evidencia de los efectos adversos de la exposición del ruido de
-2-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
baja frecuencia. Algunas veces se han encontrado reacciones más
molestas al ruido de baja frecuencia que a otros de frecuencias más
altas, para el mismo SPL. Las molestias se acentúan cuando el ruido
de baja frecuencia es el origen de traqueteo o vibraciones. El ruido de
baja frecuencia puede afectar a la inteligibilidad de la palabra, debido
a la forma de la curva de enmascaramiento.
Afortunadamente, en el margen de las frecuencias bajas se pueden
usar técnicas de control activo del ruido (CAR) (Cobo, 1997). El CAR
consiste en la cancelación activa de un campo de ruido primario
mediante la introducción de un campo secundario en contrafase. Un
sistema CAR consta básicamente de unos sensores para medir el
campo de ruido, unos actuadores para generar el campo secundario,
y un controlador
que pilota el proceso de cancelación. Aunque el
concepto del CAR fue introducido en 1933 por Lueg, su viabilidad
tecnológica ha estado estrechamente asociada al desarrollo de los
Procesadores Digitales de Señal (DSP). Ya que las condiciones del
ruido ambiental son generalmente cambiantes, los filtros de control
han de ser capaces de adaptarse a estos cambios, por lo que han de
ser implantados en DSP’s. Los sistemas activos ofrecen la posibilidad
de controlar
ambiente
efectivamente las bajas frecuencias para obtener un
acústico
más
satisfactorio
(calidad
sonora
y
forma
espectral). Además, al estar basados en una tecnología en abierta
progresión, como es la electrónica digital, es de esperar que
evolucionen a una mejor relación funcionamiento/coste.
Frente a la aproximación CAR clásica, que usa micrófonos como
sensores del campo acústico y altavoces como fuentes secundarias,
recientemente ha surgido otra segunda aproximación, mucho más
efectiva, y que consiste en alterar los propios mecanismos de
generación del ruido en la fuente. Cuando el ruido es de origen
-3-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
estructural, el control consiste en usar actuadores para alterar las
características de vibración de la estructura, problema que se conoce
como Control Activo Acústico Estructural (CAAE). En estos casos, los
algoritmos de control de los actuadores son los mismos que en el CAR
clásico.
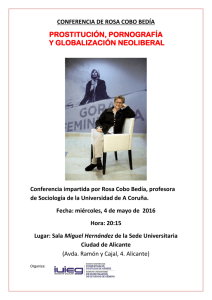
La
Figura
1
muestra
el
esquema
de
una
placa
radiando
estructuralmente, excitada en este caso mediante un vibrador
(vibrador). En la parte de arriba se muestra el ejemplo de un sistema
CAR típico, en el que se usan micrófonos para medir el ruido radiado
en el campo lejano de la placa, y altavoces para cancelarlo. En medio
podemos observar el esquema de un sistema de Control Activo de las
Vibraciones (CAV), donde se usan acelerómetros para medir las
vibraciones de la placa y actuadores piezoeléctricos para cancelarlas.
Como veremos más adelante, la reducción de los modos estructurales
de una placa no implica necesariamente la reducción del ruido
radiado. Hay que tener en cuenta que todos los modos estructurales
no tienen la misma eficiencia de radiación acústica. Por consiguiente,
es mucho más eficaz concentrar el esfuerzo del controlador en reducir
los modos que radian potencia acústica. En la parte de abajo de la
Figura se describe esta estrategia. Se mide la energía acústica
radiada mediante micrófonos en el campo lejano, y se actúa sobre la
vibración de la placa. Esto es lo que Fuller denominó el Control Activo
Acústico Estructural (CAAE). Los actuadores ocupan un volumen
menor que los altavoces y pueden ser integrados en la propia
estructura. Además, los actuadores están más próximos de la fuente
del ruido, uno de los axiomas del CAR.
En muchas aplicaciones es conveniente que los sensores estén
también integrados en la propia estructura. Las estructuras que
integran los sensores y actuadores se denominan inteligentes. En los
-4-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
sistemas CAAE sobre estructuras inteligentes los sensores y los
actuadores son estructurales.
CAR
CAV
CAAE
Figura 1. Esquema de un sistema CAR (arriba) CAV (centro) y CAAE (abajo)
-5-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Como ya se ha comentado más arriba, el control de las vibraciones no
garantiza el control del ruido radiado en el campo lejano. Los modos
estructurales responsables de la radiación acústica se denominan
modos radiantes, modos volumétricos o modos supersónicos. Gran
parte del esfuerzo de los últimos años en el desarrollo de sistemas
CAAE se ha invertido en el desarrollo de sensores estructurales de los
modos radiantes.
En la Sección 2 haremos un repaso de los sensores y actuadores que
se pueden usar en CAAE. La Sección 3 está dedicada a profundizar en
los mecanismos del CAR y CAAE. En las
Secciones 4 y 5
profundizamos en el funcionamiento de los sistemas CAAE 1D
(barras) y 2D (placas). Para condiciones de contorno sencillas
(soporte simple) existe la solución analítica del problema, por lo que
podemos llevar a cabo una comparación teoría/experimento.
2. SENSORES Y ACTUADORES PARA EL CAAE
En esta Sección repasaremos las características básicas de cinco
clases de materiales y evaluaremos su disponibilidad y potencialidad
de uso en aplicaciones CAAE. Estos materiales son (ESTEC, 1995):
• Piezoeléctricos.
• Electroestrictivos.
• Magnetoestrictivos.
• Aleaciones con memoria de forma (AMF).
• Fluidos electroreológicos.
-6-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
2.1. Materiales piezoeléctricos
Los hermanos Curie descubrieron en 1880 que en ciertos cristales,
como el cuarzo, la sal de Rochelle, o el sulfato de litio, se generaba
un voltaje eléctrico cuando se sometían a una cierta tensión mecánica
(efecto piezoeléctrico directo). Pronto se encontró que estos mismos
cristales se deformaban mecánicamente cuando eran sometidos a un
campo eléctrico (efecto piezoeléctrico inverso). En los años 50 se
produjo un avance tecnológico importante, con la sintetización de las
cerámicas piezoeléctricas, las cuales se podían fabricar con el tamaño
y la forma apropiadas para cada aplicación. La primera piezocerámica
usada fue el titanato de bario. En los años 60 se presentó una
piezocerámica con propiedades piezoeléctricas mejoradas, el titanato
circonato de plomo, o PZT, que es la base de la mayor parte de las
piezocerámicas usadas en la actualidad.
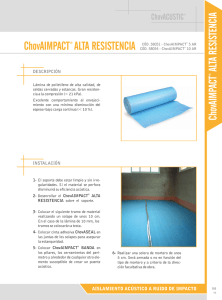
Estrictamente hablando, los cristales naturales, tales como el cuarzo,
presentan el efecto piezoeléctrico, mientras que las piezocerámicas,
como el PZT, están basadas en el efecto ferroeléctrico (Figura 2). En
su estado natural, la estructura cristalina es eléctricamente neutra.
Sin embargo, la deformación mecánica produce un desplazamiento
del centro de cargas positivas con respecto al centro de cargas
negativas, lo que da lugar a la aparición de un campo eléctrico. Y a la
inversa, la aplicación de un campo eléctrico desplaza las cargas de un
signo con respecto a las cargas del otro signo, originando una
deformación mecánica.
-7-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
+
+
-
Neutral
Sometido a un campo eléc
E
dominios ferroeléctricos
dipolos eléctricos
Figura 2. Efecto piezoeléctrico en cristales (arriba) y efecto ferroeléctrico en cerámicas
(abajo)
Un material ferroeléctrico se puede describir como un conglomerado
de dominios ferroeléctricos, cada uno de ellos caracterizado por un
dipolo eléctrico. En su estado neutral, los dipolos eléctricos están
orientados aleatoriamente, y el momento eléctrico global es cero. Sin
embargo, bajo la acción de un campo eléctrico intenso, los dipolos
tienden a orientarse en la dirección del campo eléctrico, dando lugar
a una deformación. Y a la inversa, una deformación del material
tiende a favorecer unos dipolos con respecto a otros, dando lugar a la
aparición
de
un
campo
eléctrico.
Así
pués,
tanto
el
efecto
piezoeléctrico como el ferroeléctrico son reversibles. En lo sucesivo,
hablamos en general de materiales piezoeléctricos englobando en el
mismo término a las cerámicas ferroeléctricas.
-8-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
En los materiales ferroeléctricos, la deformación es proporcional al
cuadrado del campo eléctrico aplicado (Stansfield, 1990). Cuando se
aplica un campo eléctrico senoidal a una determinada frecuencia, la
deformación
es
armónica
sin 2 (ωt ) = [1 − cos(2ωt )]/ 2 ).
a
Este
la
frecuencia
problema
se
doble
evita
(nótese
polarizando
que
la
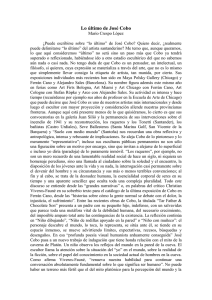
cerámica, mediante la aplicación de un campo eléctrico constante. La
polarización orienta los dipolos en una dirección preferida. El proceso
de polarización incluye (Figura 3):
•
Calentamiento de la cerámica por encima de su temperatura de
Curie (temperatura por encima de la cual el material pierde sus
propiedades piezoeléctricas).
•
Aplicación de un campo eléctrico intenso (varios kV/cm).
• Enfriamiento lento.
Figura 3. Proceso de fabricación de una piezocerámica (Ferroperm, 1996)
-9-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
En una cerámica piezoeléctrica polarizada existe una relación lineal
entre sus propiedades mecánicas y eléctricas. Desde un punto de
vista eléctrico, una cerámica fina se comporta como un condensador
plano (Figura 4), donde la capacidad, C, la carga Q, y el voltaje, V,
están relacionados por
C=
Q
A
= ε0
V
h
V
A
h
Figura 4. Un condensador plano
Definiendo el desplazamiento eléctrico D como la carga por unidad de
superficie
D=
Q
V
= ε0 = ε0E
A
h
donde E es el campo eléctrico. En general para una cerámica
sometida a una polarización eléctrica, P
D = ε0E + P
-10-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
En un sistema elástico 1D, la tensión, T, y la deformación, S, están
relacionadas a través de la constante de rigidez elástica (módulo de
Young)
(Ley de Hooke)
T = cS
En un material piezoeléctrico, las variables elásticas (T,S) y las
variables eléctricas (E,D) están interrelacionadas. Las ecuaciones que
relacionan ambas variables se denominan ecuaciones constitutivas. Si
consideramos (T,D) como variables independientes y (S,E) como
variables independientes, en la aproximación lineal (IEEE, 1988)
∂T
∂T
T =
S −
E
∂S E
∂E S
∂D
∂D
D=
S +
E
∂S E
∂E S
(1a)
Pero
∂T
=c
∂S E
la
constante
de
rigidez
elástica
∂T
∂D
−
=
=e
∂E S ∂S E
la
constante
de
tensión
piezoeléctrica
∂D
=ε
∂E S
la
constante
dieléctrica
absoluta, o permitividad del medio
Y por tanto
-11-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
T = c S −e E
D = e S +ε E
(1b)
Análogamente, si consideramos (S,D) como variables dependientes y
(T,E) como variables independientes
S = s T +d E
D = d T +ε E
(2)
donde
∂S
∂D
=d
=
∂E T ∂T E
la constante de deformación
piezoeléctrica
∂S
=s
∂T E
la
flexibilidad
del
medio
(inversa de la rigidez)
Análogamente, si consideramos (S,E) como variables dependientes y
(T,D) como variables independientes
S =s T+gD
E = −g T + β D
(3)
donde
∂E
∂S
−
=
=g
∂T D ∂D T
la
constante
piezoeléctrica
-12-
de
voltaje
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
∂E
=β
∂D T
la
impermitividad
(inversa
de
la
del
medio
constante
dieléctrica)
Finalmente, si consideramos (T,E) como variables dependientes y
(S,D) como variables independientes
T =c S −h D
E = −h S + β D
(4)
donde
∂T
∂E
−
= − = h
∂D S
∂S D
otra constante piezoeléctrica
Existen las siguientes relaciones entre las constantes de un material
piezoeléctrico:
La
d =ε g
c=eh
e=dc
g=βd
s=d g
β =gh
d =ε g
h=gc
Tabla
1
resume
las
variables
usadas
en
las
ecuaciones
constitutivas, así como sus unidades. La Tabla 2 resume las
ecuaciones constitutivas.
-13-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Tabla 1. Variables piezoeléctricas y sus unidades
NOMBRE
SIMBOLO
UNIDAD
Tensión
T
N/m2
Deformación
S
adimensional
Campo eléctrico
E
V/m
Desplazamiento eléctrico
D
C/m2
Cte de rigidez elástica (Young)
c
N/m2
Cte de compliancia elástica
s
m2/N
Permitividad
ε
F/m
Impermitividad
β
m/F
Cte de tensión piezoeléctrica
e
C/m2 o N/Vm
Cte de deformación piezoeléctrica
d
C/N o m/V
Cte de voltaje piezoeléctrica
g
Vm/N o m2/C
Cte piezoeléctrica
h
V/m o N/C
Tabla 2. Ecuaciones piezoeléctricas
VARIABLES
VARIABLES
ECUACIONES
DEPENDIENTES
INDEPENDIENTES
PIEZOELECTRICAS
T,D
S,E
T = c S −e E
D = e S +ε E
S, D
T,E
S = s T +d E
D = d T +ε E
S,E
T,D
S =s T+gD
E = −g T + β D
T,E
S,D
T =c S −h D
E = −h S + β D
Las propiedades electro-mecánicas de los materiales piezoeléctricos
son magnitudes tensoriales. Por tanto, las Ecs. (1)-(4) son relaciones
-14-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
tensoriales. Así por ejemplo, las Ecs. (1b) se deberían escribir en la
forma
T p = c Epq S q − ekp Ek
Di = eiq S q + ε ikS Ek
(1c)
Consideremos el sistema de ejes descrito en la Figura 5.
3
1=eje longit
2=eje anchur
3=eje espeso
2
1
Figura 5. Sistema de ejes para la definición de constantes piezoeléctricas
Generalmente, el material se polariza en la dirección del eje 3. Por
convenio, el primer subíndice de una constante piezoeléctrica da la
dirección del campo eléctrico o polarización, mientras que el segundo
subíndice da la dirección de la tensión o deformación. Por ejemplo, la
constante d31 relaciona la tensión mecánica en la dirección 1 cuando
se aplica una polarización en la dirección 3.
En aplicaciones CAAE es muy importante identificar la constante de
interés para cada aplicación. Por ejemplo, para un actuador se
requiere un material que desarrolle una fuerza mecánica alta cuando
se aplica una polarización eléctrica dada, es decir un d alto. Sin
embargo, para un sensor se requiere que el material proporcione un
-15-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
campo eléctrico alto cuando se deforma mecánicamente, es decir un
e alto.
Otro
coeficiente
importante
es
el
factor
de
acoplamiento
electromecánico, k, el cual mide la eficiencia en la conversión
electromecánica. Generalmente, k es considerado como una cifra de
mérito del material. Se define k2 como la fracción de energía eléctrica
convertida a energía mecánica o viceversa. Por ejemplo, k=0.7071
(k2=0.5) indica que el 50% de la energía eléctrica total será
convertida a energía mecánica. El coeficiente de acoplamiento
electromecánico, depende de la forma del material piezoeléctrico.
Para el caso de placas, operando cuasi-estáticamente por debajo de
su frecuencia de resonancia mecánica
k=
d2
(5)
sε
Generalmente,
las
firmas
piezoeléctricos
(Ferroperm,
comerciales
Matroc,...)
que
fabrican
suelen
materiales
proporcionar
sus
constantes eléctricas (ε), mecánicas (ρ, s, ν), y piezoeléctricas (k, d,
g). La Tabla 3 muestra las propiedades eléctricas, mecánicas y
electromecánicas de algunas piezocerámicas de Ferroperm. Como se
verá más adelante, las piezocerámicas se usan en aplicaciones CAAE
esencialmente como actuadores en el modo 31 (polarización vertical y
actuación horizontal). Del análisis de la Tabla 3, parece que unas
piezocerámicas interesantes como actuadores serían la Pz29 y la Pz21
(la Pz29 tiene unas prestaciones superiores a la Pz21, ya que tiene un
d31 y un k31 superiores).
-16-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Tabla 3. Propiedades de algunas piezocerámicas de Ferroperm (Según Ferroperm,
1996)
PROPIEDADES
Pz21
Pz23
Pz24
Pz26
Pz27
Pz28
Pz29
Cte dieléctrica relativa, K33
3900
1500
400
1300
1800
1070
2900
TCurie (ºC)
180
350
330
330
350
330
235
Margen de temperatura (ºC)
100
250
230
230
250
230
150
Factor de acoplamiento k31
0.29
0.29
0.29
0.33
0.33
0.34
0.37
Factor de acoplamiento, k33
0.65
0.65
0.67
0.68
0.70
0.69
0.75
220
130
55
130
170
120
240
540
330
190
330
425
320
575
-g31 (10-3 Vm/N)
6
10
16
11
11
13
10
-g33 (10-3 Vm/N)
16
25
54
28
27
34
23
Densidad, ρ (103 kg/m3)
7.8
7.7
7.7
7.7
7.7
7.7
7.45
Flexibilidad s11E (10-12 m2/N)
16
15
10
13
17
13
17
Flexibilidad s33E (10-12 m2/N)
20
19
23
20
23
23
23
Flexibilidad s11D (10-12 m2/N)
15
14
10
12
15
11
15
Flexibilidad s33E (10-12 m2/N)
11
11
13
11
12
12
10
Factor de Poisson, σE
0.4
0.39
0.29
0.33
0.39
0.31
0.34
Factor de calidad QM
70
100
80
>1000
90
Eléctricas
Electromecánicas
-12
-d31 (10
C/N)
d33 (10-12 C/N)
Mecánicas
>1000 >1000
El titanato-zirconato de plomo (PZT) es el material típico usado como
actuador, debido a su alto coeficiente de acoplamiento, combinado
con la alta temperatura de Curie que soporta. Aunque se puede
fabricar según la forma deseada, se suele manufacturar en forma de
pastillas o discos. El PZT es el material más usado en el diseño de
transductores electroacústicos. El PZT dopado con lantano, el PZLT es
mejor como actuador pero peor como sensor, aunque pierde sus
-17-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
propiedades piezoeléctricas por encima de 65 ºC. El polivinilideno
fluoroso, PVDF, es una material que combina las características de los
materiales
plásticos
con
las
de
los
piezoeléctricos,
con
unas
características excelentes como sensor (g alto), a pesar de su baja
temperatura de Curie. Se suele fabricar en forma de película (es muy
parecido al papel de plata) con espesores de 9-50 µm, por lo que
constituye un elemento muy interesante como sensor para integrar
en estructuras inteligentes. Como veremos más adelante, es el
material más usado en el diseño de sensores distribuidos, ya que se
puede cortar fácilmente para darle la forma deseada. La Tabla 4
resume
las
propiedades
de
un
material
PVDF
fabricado
por
PIEZOTECH.
Tabla 4. Valores típicos de las constantes de un PVDF de PIEZOTECH
PROPIEDADES PIEZOELECTRICAS
k31 (%)
10 a 20
d33 (pC/N)
-15 a -18 ± 20 %
d31 (pC/N)
6 ± 20 %
d32(pC/N)
1 a 6 ± 20 %
g33 (Vm/N) (a 1 kHz)
-0.1 a –0.2 ± 20 %
εr (a 1 kHz)
PROPIEDADES DIELECTRICAS
9.4 a 11.5 ± 10 %
PROPIEDADES MECANICAS
Módulo de Young (Mpa)
950 a 3200 ± 20 %
Densidad (Kg/m3)
1800
PROPIEDADES TERMICAS
Temperatura de fusión (ºC)
150 a 175 ± 5 %
Temperatura máxima de uso (ºC) 90 a 100
Algunos autores (Fuller et al, 1994; Gentry et al, 1997) han usado
secciones curvadas cilíndricamente de PVDF (28 µm) embebidas en
-18-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
espuma
acústica
de
poliuretano
parcialmente
reticulada
como
actuadores para el control del ruido reflejado/transmitido por ciertas
estructuras. El sistema combinaba la atenuación pasiva de la espuma
(efectiva a frecuencias altas) con el control activo que proporciona el
elemento PVDF cuando se excita con una entrada eléctrica apropiada
(efectivo a frecuencias bajas). El actuador PVDF se comportaba
linealmente y se diseñó para incrementar su eficiencia de radiación
sonora. El sistema se montaba recubriendo la superficie radiante
(coatings) por lo que es altamente recomendable en control del ruido
radiado estructuralmente. La curvatura del PVDF según un patrón
senoidal se hacía para incrementar la eficiencia del PVDF como
actuador (mayor superficie transductora).
Cuando se elige un material piezoeléctrico como sensor o actuador es
necesario tener en cuenta también otras propiedades, como la
densidad, la permisividad dieléctrica, la respuesta en frecuencia, la
efectividad y la eficiencia (ESTEC, 1995). El PVDF tiene una densidad
cuatro veces menor que el PZT, y es más blando, por lo que puede
pegarse directamente sobre la estructura, y experimentar mayores
deformaciones sin distorsión. La permisividad dieléctrica del PVDF es
del orden de 100 veces menor que la del PZT, por lo que su e31 es del
orden de 20 veces mayor. Como ya hemos dicho antes, el PVDF es
mucho más apropiado como sensor que el PZT. El PVDF tiene una
respuesta en frecuencias plana desde dc hasta el margen de los MHz
o GHz, dependiendo de su espesor. Cuanto más fino sea, más alta es
la frecuencia superior del margen de respuesta en frecuencia plana.
La efectividad de un material piezoeléctrico como actuador se define
como (ESTEC, 1995)
-19-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
α
Efectividad = (Vmax d 31 )
α + ( E b t b / E c t c )
(6)
donde
Vmax
es el máximo campo piezoeléctrico disponible (V/m)
d31
es el coeficiente de acoplamiento piezoeléctrico
α
es el parámetro de equilibrio de la estructura
Eb
es el módulo de Young de la estructura (N/m2)
Tb
es el espesor de la estructura (m)
Ec
es el módulo de Young del material piezoeléctrico (N/m2)
Tc
es el espesor del material cerámico (m)
La efectividad representa la máxima cantidad de deformación que el
actuador puede transmitir a la estructura cuando se aplica el campo
eléctrico máximo a través de sus terminales. El término entre
paréntesis del lado derecho de la Ec. (6) representa la máxima
deformación que puede producir el piezoeléctrico. El término entre
corchetes expresa cuanta de esta deformación puede ser transmitida
a la estructura, y depende de las propiedades mecánicas del actuador
y de la estructura. Un actuador efectivo debe soportar un campo
eléctrico alto (Vmax alto) y debe tener un alto coeficiente de
acoplamiento (d31 alto). La efectividad aumenta también con el
cociente (Ectc/Ebtb). Por tanto, el actuador debe tener un módulo de
Young alto. La Tabla 5 muestra una comparación de la efectividad del
PVDF y PZT asumiendo que una estructura de aluminio con un
espesor 10 veces mayor que el del piezoeléctrico, el cual induce
ondas de flexión (α=6). Otra propiedad interesante es la efectividad
por unidad de campo, ya que permite comparar varios materiales
cuando se les aplica el mismo campo eléctrico. Como observamos en
esta Tabla, el PZT tiene una efectividad/campo, un módulo de Young
-20-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
y una temperatura de Curie mucho más altos que los del PVDF, por lo
que es mucho más apropiado como actuador.
Tabla 5. Propiedades del PZT y PVDF (Según ESTEC, 1995)
Material
PZT G-1195
PVDF
Densidad (Kg/m2)
7500
1780
Tcurie (ºC)
360
100
Emax (V/m)
600 x 103
40 x 103
d31 (m/V)
-190 x 10-12
23 x 10-12
g31 (V m/N)
0.01
0.216
Módulo de Young (N/m2)
63 x 109
3 x 109
εr
1200
12
k31 (%)
30-40
10-20
Efectividad
40 10-6
21 10-6
Efectividad/campo (m/V)
67 10-12
553 10-15
Sin embargo, el PZT tiene una serie de desventajas que hay que
valorar cuando se diseña un actuador para aplicaciones CAAE:
• Es más pesado, por lo que carga más la estructura.
• Es difícil de fabricar en láminas finas (<20 µm).
• Debe ser plano y pequeño.
• Más susceptible a envejecimiento.
• Tiene más histéresis.
• Sólo se usa para excitar ondas flexionales o longitudinales (no de
torsión).
Por esto, en muchas aplicaciones puede ser interesante el uso del
PVDF como actuador, a pesar de su menor efectividad. La Tabla 6
muestra las eficiencias mecánica y electromecánica del PZT y PVDF.
-21-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Tabla 6. Eficiencias mecánica y electromecánica del PZT y PVDF (ESTEC, 1995)
Propiedad
PZT
PVDF
Eficiencia mecánica (d31xEp)
16.6
0.11
Eficiencia mecánica específica
221 x 10-5
6 x 10-5
996 x 104
448 x 104
1330
2500
(d31xEp)/ρ
Eficiencia electromecánica Eem
(Vmaxxd31xEp)
Eficiencia electromecánica específica
(Eem/ρ)
Como podemos observar, el PZT tiene una eficiencia mecánica mucho
mayor. Sin embargo, la eficiencia electromecánica específica (tiene en
cuenta la carga mecánica sobre la estructura) es más favorable al
PVDF.
En resumen, se puede concluir que el PZT es superior como actuador
de ondas de flexión sobre estructuras pesadas. Cuando la carga que
introduce
el
piezoeléctrico
sobre
la
estructura
es
importante
(estructuras ligeras), o cuando el actuador deba adaptarse a una
estructura no plana, puede ser interesante el uso del PVDF como
actuador. Y desde luego, el PVDF es siempre superior como elemento
sensor.
El problema de la rigidez de los materiales cerámicos se puede
resolver
diseñando
compuestos
se
materiales
construyen
compuestos.
dispersando
polvo
Los
de
materiales
un
material
piezoeléctrico en un polímero sólido. Estos materiales compuestos
tienen una densidad mucho menor que la de las cerámicas clásicas.
Cuando el material base de estos compuestos es goma, se denominan
-22-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
piezorubbers. Tienen la ventaja de que son flexibles y se pueden
ajustar
a
superficies
no
planas.
Es
decir,
son
ideales
como
recubrimientos activos sobre todo en el agua (su impedancia es más
próxima a la del agua). Se puede ajustar el voltaje de excitación de
estos materiales para producir reflexión cero (materiales anecoicos),
transmisión cero, o ambos (Lafleur et al, 1991).
z
(a)
z
x
x
Excitación en contrafase
Excitación en fase
Ondas flexionales
Ondas longitudinales
(b)
z
x
=
z
z
x
+
Ondas flexionales
x
Ondas longitudinales
Figura 6. (a) Excitación de ondas flexionales o longitudinales con un actuador doble.
(b) Excitación de ambos tipos de ondas con un actuador simple
-23-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
En aplicaciones CAAE es muy común usar actuadores constituidos por
un par de cerámicas PZT, una a cada lado de la estructura. Con un
par de cerámicas excitadas en fase es posible generar ondas
longitudinales puras (Figura 6a). Con un par de cerámicas excitadas
en contrafase es posible excitar ondas flexionales puras (Figura 6a).
Es posible usar el desfase entre ambas cerámicas para enfatizar un
tipo de onda, flexional o longitudinal. Sin embargo, con una sola
cerámica, se generan siempre ambos tipos de ondas (Figura 6b)
(Gibbs y Fuller, 1992).
Muchos
autores
han
desarrollado
modelos
que
describen
el
comportamiento de un actuador PZT integrado en una estructura
vibrante. En las Secciones 4 y 5 los describiremos con más detalle.
Brennan et al (1997) presentaron un modelo ondulatorio para
investigar el acoplamiento dinámico entre un actuador simple o doble
y una estructura 1D (una barra). El actuador y la barra eran
separados en partes activa y pasiva, las cuales se modelizaban
separadamente, y después se conectaban mediante condiciones de
contorno adecuadas. La ventaja de este modelo es su simplicidad, ya
que solo requiere la modelización del comportamiento en la vecindad
del actuador. El modelo desarrollado permite incluir las características
pasivas del actuador (su masa y su rigidez). También permite analizar
separadamente las ondas longitudinales y de flexión generadas en la
barra. El análisis demostraba que la rigidez y la masa tienen muy
poco efecto en las ondas longitudinales y en las ondas flexionales en
baja frecuencia y con cerámicas finas. En alta frecuencia y con
cerámicas gruesas relativas al espesor de la estructura, es necesario
incluir los efectos pasivos. Se demostraba también que para un
voltaje dado, un actuador genera más potencia flexional que
longitudinal en baja frecuencia. Cuando la longitud del actuador es
mayor que 4/5 la longitud de onda flexional, se invierte esta
-24-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
tendencia (se genera más potencia longitudinal que flexional). La
longitud óptima del actuador para generación de ondas flexionales es
media longitud de onda. Como las velocidades de propagación
longitudinal y flexional son distintas, es claro que no se puede
construir un actuador óptimo para controlar ambos tipos de onda.
Habrá que llegar a un compromiso. En resumen, para este tipo de
actuador, el tipo y amplitud de ondas generadas dependerá de la
frecuencia, de la longitud del actuador, de su espesor y del espesor
de la estructura.
2.2. Materiales electroestrictivos
La
electroestricción
es
un
término
asociado
a
menudo
a
la
piezoelectricidad, aunque es un fenómeno distinto. Aunque ocurre en
todos los materiales dieléctricos, generalmente es muy débil y está
dominado por el efecto piezoeléctrico. Tanto la piezoelectricidad como
la electroestricción son efectos de acoplamiento electromecánico que
convierten
energía
eléctrica
a
energía
mecánica,
y
viceversa,
reorientando los dipolos y deformando el material. Sin embargo, la
electroestricción es suficientemente grande como para producir un
acoplamiento electromecánico sólo en aquellos materiales que tienen
una constante dieléctrica alta. A diferencia de
piezoeléctricos,
la
deformación
producida
los materiales
en
materiales
electroestrictivos es proporcional al cuadrado del campo eléctrico
aplicado, Figura 7. Como vemos en esta Figura, en los materiales
electroestrictivos
siempre
se
produce
un
alargamiento,
independientemente de la polaridad del campo.
El efecto electroestrictivo no suele ser lo suficientemente grande
como para poder ser explotado en dispositivos electromecánicos,
excepto en una familia conocida como relaxores ferroeléctricos, los
-25-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
cuales poseen propiedades electroestrictivas comparables a las de los
piezoeléctricos. Los más conocidos son las cerámicas basadas en el
plomo,
magnesio,
y
niobato
(PMN).
Aunque
las
constantes
electroestrictivas de los PMN son pequeñas, sus altos coeficientes
dieléctricos dan lugar a grandes deformaciones.
Figura 7. Curva campo eléctrico-deformación en un material electroestrictivo (Según
ESTEC, 1995)
Las cerámicas PMN producen deformaciones de hasta el 0.1 % sin
prácticamente ninguna histéresis. Otra ventaja adicional es que no
sufren apenas envejecimiento. Sus altos módulos elásticos dan lugar
a dispositivos con una gran rigidez, capaces de ejercer grandes
fuerzas deflectoras.
En resumen, frente a los materiales piezoeléctricos, los actuadores
electroestrictivos tienen las siguientes ventajas:
• Dan lugar a deformaciones iguales o superiores.
-26-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
• Requieren voltajes de operación substancialmente menores.
• Tienen un consumo de potencia más bajo.
• Prácticamente no sufren de histéresis o envejecimiento.
Sin embargo, los materiales piezoeléctricos ofrecen los siguientes
beneficios:
• Son más baratos y su diseño es más simple.
• Requieren amplificadores de potencia menos potentes en alta
frecuencia. Esto es debido a que los materiales electroestrictivos
tienen una capacidad relativamente alta.
• Son menos sensibles a variaciones con la temperatura.
2.3. Materiales magnetoestrictivos
Los materiales magnetoestrictivos son sólidos cristalinos o amorfos
que se deforman cuando son sometidos a una campo magnético
externo. Los dominios magnéticos de estos materiales, distribuidos
aleatoriamente en su origen, se alinean con el campo magnético
aplicado, dando lugar a una deformación. Desde los años 50 se
conoce que compuestos de níquel exhibían esta propiedad, pero su
uso en dispositivos electromecánicos fue muy limitado, debido a que
producían muy poca deformación. Sin embargo, el descubrimiento de
unas aleaciones a base de terbio y hierro, capaces de producir
deformaciones del orden del 0.1 % ha renovado el interés por los
materiales magnetoestrictivos. El más conocido de estos materiales
es el Terfenol-D, una aleación a base de terbio, disprosio y hierro. El
Terfenol-D tiene las siguientes características:
• Tiene un factor de acoplamiento magnetomecánico relativamente
alto (hasta un 60%), un módulo de Young bajo (del orden de la
-27-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
mitad de los piezoeléctricos), y es capaz de generar grandes
desplazamientos.
• Tiene una respuesta en frecuencia como la de la Figura 8. Puede
funcionar por debajo de la frecuencia de resonancia, en cuyo caso
proporciona un actuador con respuesta en frecuencia plana, o a la
frecuencia
de
resonancia,
en
cuyo
caso
produce
mayores
deformaciones. La frecuencia de resonancia depende de la rigidez y
la masa del Terfenol-D (cuanto mayor la masa, más largo y más
fino, menor la frecuencia de resonancia).
Figura 8. Respuesta en frecuencia de un actuador de Terfenol-D (Según ESTEC, 1995)
• Sus propiedades magnetoestrictivas decaen linealmente con la
temperatura hasta una temperatura de Curie de 380 ºC.
• Sufre de histéresis.
• Su principal inconveniente es la necesidad de ser excitados con un
campo magnético, lo que da lugar generalmente a actuadores
voluminosos.
2.4. Aleaciones con memoria de forma
-28-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Una aleación con memoria de forma (AMF) es un material que tiende
a recuperar su forma original cuando se calienta. Si estiramos el
material, por ejemplo, y lo calentamos, cuando sobrepasa una cierta
temperatura, tenderá a recuperar su estado original, proporcionando
una tensión en la dirección longitudinal. Uno de los materiales AMF
con propiedades más espectaculares es una aleación de Níquel y
Titanio denominada Nitinol. Las AMF se pueden usar como actuadores
para el control activo de las vibraciones y del ruido estructural, y
como sensores (Rogers, 1990). Además, se pueden embeber fibras o
películas de estos materiales en estructuras para formar compuestos
híbridos con efecto memoria de forma. Para construir compuestos
híbridos con AMF para el CAAE se puede usar la técnica denominada
sintonización activa de la energía de deformación (ASET). Esta técnica
consiste en sintonizar o modificar la respuesta modal de la estructura
(barras o placas) simplemente calentando las fibras AMF embebidas o
pegadas a la estructura, de tal modo que cambie la rigidez de toda la
estructura. El Nitinol es capaz de cambiar el módulo de Young de la
estructura por un factor 4 y la yield stress por un factor 10 (Figura 9).
Estos cambios del material ocurren simplemente por un cambio de
fase (cuando se supera una cierta temperatura en la AMF) y no da
lugar a ninguna fuerza apreciable. Es decir, cuando se activan los
fibras de AMF, se coloca la estructura en un estado de deformación
residual, sin originar deflexiones en la misma. La energía de
deformación almacenada resultante cambia el balance de energía de
la estructura y modifica su respuesta modal. La fase de baja
temperatura, donde se da a la AMF la forma que después ha de
recordar, se denomina condición blanda o estado martensita. La fase
de alta temperatura, donde la AMF recupera su forma original, se
denomina condición dura o estado austensita. La temperatura de
paso de un estado a otro se denomina de transición. La temperatura
-29-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
de transición del material se puede controlar. El calentamiento para
pasar de un estado a otro se suele hacer eléctricamente.
Figura 9. Características típicas del Nitinol (Según ESTEC, 1995)
Ya que el módulo de elasticidad cambia de una fase a otra, cambian
también el amortiguamiento y los modos de vibración de la
estructura. Por tanto se pueden usar también como recubrimientos
pasivos.
Las características de las AMF se pueden resumir en (ESTEC, 1995):
• Dan lugar a actuadores de banda estrecha (anchos de banda de 20
Hz como máximo).
-30-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
• Debido a que experimentan grandes pérdidas térmicas, requieren
substancialmente más energía que los otros materiales para ser
activados.
• Sufren de histéresis.
• Se suelen usar embebidos en la estructura. Las tensiones que
originan se concentran en la interfaz entre ambos, lo que puede
tener un efecto indeseable en la integridad y en la fatiga de la
estructura.
La Tabla 7 resume las características fundamentales de diferentes
materiales
piezoeléctricos
(PZT),
electroestrictivos
(PMN),
magnetoestrictivos (Terfenol-D), y AMF (Nitinol).
Tabla 7. Comparación de algunas características de actuadores (Según ESTEC, 1995)
Parámetro
PZT
PMN:BA
Terfenol-D
Nitinol
Deformación
0.03
0.08
0.18
4-8
10-18
<1
2
>50
MHz
MHz
10-20 kHz
1-20 Hz
360 ºC
380 ºC
380 ºC
-200 a 150
(%)
Histéresis
(%)
Ancho de
banda
TCurie
ºC
(Ttransición)
Módulo de
65 x 109
120 x 109
Young (N/m2)
Emax (V/m)
2.5-3.5 x
70 x 1012
1010
2000
Depende del
diseño
Disponibilidad
pastillas,
pastillas,
discos,..
discos,..
-31-
hilos
hilos, tiras,
hojas, ..
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
2.5. Fluidos electroreológicos
Los
fluidos
electroreológicos
(FER)
son
suspensiones
que
experimentan cambios reológicos de primer orden cuando son
sometidos a un campo eléctrico. El FER más usado consiste en un tipo
de aceite dieléctrico dopado con partículas semiconductoras. Cuando
se somete a un campo eléctrico suficientemente intenso, estas
partículas se encadenan en dirección transversal a los electrodos,
dando lugar a un cambio aparente en la viscosidad (o resistencia al
flujo) del fluido. Su aplicación más inmediata en sistemas CAAE es
suspensiones semi-activas o como soporte activo (Hansen y Snyder,
1997). Un aspecto importante de este tipo de actuadores es su
tiempo de respuesta (varios ms), lo que restringe mucho su uso. Otro
inconveniente es que requieren voltajes de 2 a 10 kV.
Wicker et al (1997) usaban la gran variación de las propiedades
viscoelásticas de los FER para diseñar absorbentes eléctricamente
controlables para aplicaciones submarinas. Gulden et al (1995)
combinaban las propiedades de los FER con las de un elastómero
blando para construir un material elastomérico electro-activo que
puede ser usado como un recubrimiento activo-pasivo para control de
señales hidroacústicas con escalas de tiempos de milisegundos (por
ejemplo el ruido de flujo).
3. MECANISMOS DE CONTROL
Fuller et al (1991) hacían una comparación experimental entre el
control CAR y CAAE del ruido radiado por un panel fino. En ambos
casos, el panel era excitado a una frecuencia pura, que podía ser una
frecuencia propia del panel o una frecuencia intermedia entre modos
-32-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
(vibración forzada). En CAR, se trataba de cancelar el ruido radiado
usando altavoces próximos al panel vibrante. En CAAE, se usan 1-3
actuadores (vibradores) sobre el propio panel. Este trabajo ponía más
énfasis en la parte acústica que en la parte electrónica. De hecho, la
cancelación se hacía manualmente, ajustando las amplitudes y las
fases de las fuentes de control para máxima cancelación en los
sensores de error (un micrófono formando un determinado ángulo
con el eje acústico del panel). Se trataba de un panel de acero, Figura
10, de (380 mm x 300 mm x 2 mm), excitado con un vibrador.
L
y
= 300 mm
y
x
+
(1,1)
L
x
+
-
(2,1)
= 380 mm
+
(1,2)
+ - +
(3,1)
Figura 10. Placa sobre la que aplicaban CAAE Fuller et al (1991)
Las medidas se hicieron en la cámara anecoica de la Universidad de
Adelaida (Australia). Se aplicaba este control manual cuando el panel
era excitado a frecuencias puras. La Figura 11 muestra el esquema de
las disposición de fuentes primaria y secundarias, y de los sensores
de error, a la frecuencia correspondiente al modo (1,1), 87 Hz. La
Figura 12 muestra los diagramas polares de radiación del panel bajo
control CAAE (arriba) y CAR (abajo). Observamos como con un solo
actuador es posible conseguir una cancelación mayor que con tres
-33-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
altavoces. En el caso CAR, puede incluso existir refuerzo en el plano
del panel.
CAAE
Fuente primaria en el centro del panel
Fuente secundaria a (190 mm, 220 mm)
Micrófono de error a 135 º (resultados
Modo (1,1)
+
f= 87 Hz
CAR
Fuente primaria en el centro del panel
Fuentes secundarias ( a 200 mm del pan
- 1 centrada
- 3 a x=95 , 190, y 285 mm
Micrófono de error
a 90º
Figura 11. Disposición de sensores y actuadores para la frecuencia del modo (1,1)
Simultáneamente,
es
posible
realizar
medidas
de
vibraciones
mediante acelerómetros, y a partir de éstas, calcular las amplitudes y
fases de los modos de la placa (ya veremos más adelante cómo), en
condiciones originales y bajo control CAAE o CAR. La Figura 13
muestra estos resultados. Como observamos en la Figura 13, la
amplitud del modo (1,1) de los campos primario y secundario es
prácticamente la misma, con un cambio de fase de 180º. Por tanto,
bajo excitación modal, el CAAE cancela el modo dominante generando
-34-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
una vibración de igual amplitud y fase contraria. Esto indica que la
introducción de la fuerza secundaria cambia la impedancia total de
entrada que el panel presenta a la fuente primaria.
Figura 12. Diagramas polares de radiación cuando se excita la placa a la frecuencia
del modo (1,1). Arriba: (-.-) Primario, (---) Secundario, (__) CAAE. Abajo: (-.-)
Primario, (---) Secundario, (…) CAR con una fuente, (___) CAR con tres fuentes (Según
Fuller et al, 1991)
La correspondiente descomposición modal del caso CAR (Figura 13,
abajo) muestra una pequeña reducción de todos los modos. Esto
sugiere que el mecanismo de control en este caso es la “descarga” de
la impedancia de radiación del panel. Esta descarga tiene un efecto
en la reducción del campo acústico, pero un efecto muy ligero en el
-35-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
patrón de vibración del panel, donde las amplitudes y fases modales
antes y después del CAR tienen valores muy similares.
180
Fase relativa (º)
90
0
-90
-180
80
Amplitud relativa (dB)
60
40
20
0
(1,1)(2,1)(1,2)(2,2)(3,1)(3,2)(1,3)(4,1)(2,2)(4,2
180
Fase relativa (º)
90
0
-90
-180
80
Amplitud relativa (dB)
60
40
20
0
(1,1)(2,1)(1,2)(2,2)(3,1)(3,2)(1,3)(4,1)(2,2)(4,2
-36-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 13. Amplitudes y fases modales cuando se excita la placa a la frecuencia del
modo (1,1). Arriba: ! Primario, ! Secundario, ! CAAE. Abajo: ! Primario, !
Secundario, ! CAR (Según Fuller et al, 1991)
Estos autores hicieron medidas similares cuando el panel era excitado
a una frecuencia de vibración de 338 Hz, intermedia entre los modos
(2,2) y (3,1) (vibración forzada). La Figura 14 muestra la posición de
los sensores y actuadores bajo control CAAE y CAR.
CAAE
Fuente primaria en el centro del pa
Fuente secundaria a (190 mm, 220 mm
Micrófono de error
a 90º y a 45º
Vibración
forzada
f= 338 Hz
CAR
Fuente primaria en el centro del pa
Fuente secundaria centrada ( a 200
Micrófono de error
a 90º
Figura 14. Disposición de sensores y actuadores para la frecuencia de 338 Hz
-37-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La Figura 15 muestra los diagramas de radiación polar del panel en
condiciones originales y bajo control CAAE y CAR. Nótese como
debido a la mayor complejidad espacial de la radiación de la placa
(lóbulos) con un sólo altavoz es difícil conseguir cancelación CAR,
excepto en el eje acústico de la placa. Sin embargo, todavía es
posible
conseguir
cancelación
CAAE
con
un
solo
actuador.
Observamos también la importancia que tiene la posición del
micrófono de error en radiación multimodal. Se obtiene mayor
cancelación con el micrófono a 90º que a 45º.
Figura 15. Diagramas polares de radiación cuando se excita la placa en vibración
forzada a la frecuencia de 338 Hz. Arriba: (-.-) Primario, (---) Secundario, (..) CAAE
con el micrófono a 90º, (__) CAAE con el micrófono a 45º. Abajo: (-.-) Primario, (---)
Secundario, (___) CAR (Según Fuller et al, 1991)
-38-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La Figura 16 muestra las amplitudes y fases modales, antes y
después de aplicar el CAAE, con el micrófono a 45º. En esta posición
del micrófono se captan los modos (1,1), (1,2) y (2,2), con una
pequeña influencia del modo (3,1).
Fase relativa (º)
180
90
0
-90
-180
80
Amplitud relativa (dB)
60
40
20
0
(1,1)
(2,1)
(1,2)
(2,2)
(3,1)
(3,2)
(1,3)
(4,1)(2,2)
(4,2
Figura 16. Amplitudes y fases modales cuando se excita la placa en vibración forzada a
la frecuencia de 338 Hz, con el micrófono a 45º. Arriba: ! Primario, ! Secundario, !
CAAE. Abajo: ! Primario, ! Secundario, ! CAR (Según Fuller et al, 1991)
La Figura 16 revela que cuando el panel es excitado en vibración
forzada, el controlador cambia la impedancia de entrada de los modos
que contribuyen a la radiación de sonido en el micrófono, reduciendo
así sus amplitudes. En lugar de cancelar un modo dominante, como
en el caso de excitación a una frecuencia modal, el controlador
-39-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
efectúa una reestructuración modal, de tal modo que la radiación
total se reduce.
Del análisis de estos resultados se obtenían conclusiones muy
interesantes:
• En CAR, el mecanismo de cancelación consistía en descargar la
fuente (reducir la impedancia de radiación).
• En CAAE, parecía haber dos mecanismos de cancelación: supresión
modal (incremento de la impedancia de entrada vista por el panel),
que
predominaba
a
las
frecuencias
propias
del
panel,
y
reestructuración modal (modificación de las fases relativas de los
modos), que predominaba en vibración forzada.
• En cualquier caso, la cancelación CAAE siempre era superior a la
cancelación CAR.
Hansen y Snyder (1991) presentaron un trabajo similar sobre la
comparación de control CAR y CAAE cuando el ruido es de origen
estructural. El mecanismo de cancelación CAR era la reducción de la
impedancia de radiación “vista” por la fuente de ruido (“descarga”
acústica de la fuente). En algunos casos, donde no se actuaba sobre
la impedancia de radiación, se podían conseguir zonas de cancelación
activa local a costa de zonas de refuerzo.
En control CAAE se encontraban dos mecanismos de cancelación:
• Control modal, o reducción de las amplitudes modales.
• Reestructuración modal, o alteración de las amplitudes y fases
modales.
-40-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La importancia relativa de un mecanismo u otro dependía de varios
parámetros del sistema geométrico y acústico/estructural.
4. CAAE EN BARRAS. MODELO 1D
A lo largo de este trabajo traducimos el término inglés beam como
barra (viga). Se trata en realidad de una estructura en la que las
dimensiones transversales son menores que la décima parte de la
longitud de onda a la frecuencia de interés (Hansen y Snyder, 1997).
En otras palabras, una barra es una estructura 1D.
En una barra de sección rectangular pueden coexistir tres tipos de
ondas (Hansen y Snyder, 1997; Fuller et al, 1996):
• Ondas longitudinales, compresionales, extensionales o axiales, que
se propagan en la dirección del eje de la barra, Figura 17a.
• Ondas flexionales o transversales, en la dirección perpendicular a la
barra, Figura 17b.
• Ondas torsionales o de cizalla, que se propagan alrededor del eje
longitudinal de la barra.
Desde el punto de vista del CAAE las ondas de interés son las
flexionales, puesto que son las que dan lugar a radiación estructural.
(a)Ondas longitudinales
(b) Ondas flexionales
Figura 17. Ondas longitudinales y flexionales en una barra
-41-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La ecuación para las ondas flexionales en una barra, también
conocida como ecuación de Euler-Bernouilli, es (Fuller et al, 1996)
EI
∂ 4w
∂ 2w
ρ
S
+
= − q ( x)
∂x 4
∂t 2
(7)
donde
E
es el módulo de Young del material
I = bh 3 / 12
es el momento de inercia de la barra
b
es la anchura de la barra
h
es el espesor de la barra
ρ
es la densidad del material
S=bh
es la sección transversal de la barra
w
es la desplazamiento en la dirección transversal de la
barra,y
q(x)
es una carga externa aplicada (fuerza por unidad de
longitud)
La ecuación para el número de onda de las ondas flexionales (Fuller
et al, 1996)
ω 4 ρ Sω 2
kf =
=
cf
EI
(8)
demuestra que éstas son dispersivas (su velocidad depende de la
frecuencia).
Las
ondas
flexionales
son
más
lentas
que
las
longitudinales, lo que puede tener implicaciones importantes en
aplicaciones CAAE (Figura 18).
-42-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La solución de la Ec. (7) para una barra infinita y una fuerza puntual
aplicada en x=0 es elemental. En este caso q(x)=Fδ(x) y la
transformada de Fourier w(x)→W(k) proporciona
W (k ) =
(
F
EI k 4 − k 4f
(9a)
)
Figura 18. Dependencia de los números de onda flexional y longitudinal con la
frecuencia
Para obtener la solución en x se toma la transformada inversa de la
Ec. (9a) y se aplica el método de los residuos en los polos (Fuller et
al, 1996) obteniéndose para x>0
w( x ) =
− jF − jk f x
−k x
− je f
3 e
4 EIk f
(
)
(9b)
que contiene una onda propagante y una onda evanescente.
-43-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Para barras finitas es necesario imponer condiciones de contorno en
los extremos de la barra. La Tabla 8 presenta un resumen de las
condiciones en los extremos más usuales. La condición de contorno
que da lugar a la solución más sencilla es la de soporte simple, y es la
que más se usa en las publicaciones sobre CAAE en barras (Clark et
al, 1991; Clark y Fuller, 1992d; Wang, 1996; Li et al, 1997;
Cunefare, 1991).
Tabla 8. Condiciones de contorno para las ondas flexionales en una barra
Esquema
Explicación
Condiciones
de contorno
Soporte simple: el extremo
w( x ) = 0
puede
∂ 2w
=0
∂x 2
rotar
pero
tiene
desplazamiento y momento
cero
Desplazamiento
y
rotación
w( x ) = 0
cero
∂ w
=0
∂x
No hay fuerza de cizalla ni
∂ 2w
=0
∂x 2
momento de flexión
∂ 3w
=0
∂x 3
Terminación general
Es
necesario
conocer
las
impedancias de flexión, Z xt , y
de
cizalla,
extremos
Z tf ,
en
los
M ( x)
Z xt = " x
θ ( x)
Z tf =
Tf ( x )
w" ( x )
La solución para la vibración vertical de una barra de longitud L
simplemente soportada en ambos extremos es (Fuller et al, 1996)
-44-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
∞
w( x, t ) = ∑ Wnψ n e jωn t
(10a)
nπ
ωn =
L
(10b)
n =1
donde
2
EI
m'
son las frecuencias propias de vibración de la barra, m’ es la masa
por unidad de longitud, Wn son las amplitudes modales que dependen
de las fuerzas aplicadas, y
nπ x
ψ n = sin(k n x) = sin
L
(10c)
son los modos propios de la barra.
Consideremos ahora la barra sometida a una fuerza armónica
f ( x , t ) = F ( x )e jωt . La ecuación diferencial en el dominio frecuencial para
el desplazamiento vertical es ahora
d 4w
F ( x)
4
4 − k f w( x ) =
dx
EI
(11)
cuya solución es (Fuller et al, 1996)
∞
w( x) = ∑ Wn sin( k n x)
(12a)
n =1
con
Wn =
(
2
EIL k n4 − k 4f
L
)∫
F ( x) sin(k n x)dx
(12b)
0
La Ec. (12b) demuestra que las amplitudes modales dependen del
desarrollo en serie de la fuerza aplicada en la base de funciones
-45-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
propias. La ortogonalidad de los modos propios puede ser usada para
excitar la barra a la frecuencia de un modo puro. Si F ( x ) = sin( k m x ) , es
obvio que sólo el modo m-ésimo tendrá una contribución a la integral
de la Ec. (12b).
Analicemos tres casos particulares. Si la fuerza aplicada es constante,
es decir, F ( x) = F , entonces
Wn =
4F
, n = 1,3,5,..
nπEI k n4 − k 4f
(
)
(12c)
Una barra simplemente soportada sometida a una fuerza externa
uniforme responde sólo en los modos simétricos n=1,3,5,.. Esto es
lógico, ya que los modos antisimétricos, n=2,4,6,.. darán lugar a una
integral cero en la Ec. (12b). Una propiedad interesante de la Ec.
(12c) es que la amplitud modal decrece con el orden modal (o con la
frecuencia).
Otro caso interesante es el de una fuerza puntual, F ( x ) = Fδ ( xi ) . En
este caso
Wn =
2 Fsin( k n xi )
(
EIL k n4 − k 4f
(12d)
)
La respuesta en frecuencias de una barra simplemente soportada en
sus extremos, y excitada mediante una fuerza externa puntual puede
obtenerse combinando las Ecs. (12a) y (12d). Se obtiene
w( x ) =
2 F ∞ sin(k n x)sin(k n xi )
∑ k4 − k4
EIL n=1
n
f
(
)
-46-
(13a)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La Ec. (13a) demuestra la importancia de la posición de la fuerza
puntual. De hecho, cuando la fuerza está localizada en la línea nodal
de un modo es incapaz de excitarlo. Teniendo en cuenta que
k n4 = m'ω n2 / EI , y k 4f = m' ω 2 / EI , podemos poner esta ecuación como
w( x , ω ) =
− 2 F ∞ sin(k n x )sin(k n xi )
∑ ω2 −ω2
M n=1
n
(
)
(13b)
donde M=m’L es la masa total de la barra. Vemos que cuando kn=kf,
o cuando ω=ωn, la respuesta en frecuencias de la barra tiende a
infinito. Para evitar estas singularidades es necesario introducir en la
formulación el amortiguamiento de la barra, considerando un módulo
de Young complejo, E '= E (1 + jη) , donde η es el factor de pérdidas de
la barra. La Figura 19 muestra la respuesta en frecuencias de una
barra de L=0.38 m, EI=5.329 Nm2, m’=0.6265 Kgm-1, xi=0.1L, y
η=0.001, obtenida mediante la Ec. (13b), junto con las formas de los
tres primeros modos.
Figura 19. Respuesta en frecuencia de una barra con soportes simples (Según
Fuller et al, 1996)
-47-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
De nuevo encontramos que la amplitud modal decrece cuando se
incrementa el orden modal. Estas estructuras 1D actuan como un
filtro paso bajo en términos de su respuesta modal.
El tercer caso que analizaremos, muy intersante en CAAE, es la
excitación de la barra mediante una cerámica rectangular de un
material piezoeléctrico. Clark et al (1991) consideraban un actuador
como el de la Figura 20, constituido por dos cerámicas excitadas en
contrafase, perfectamente pegadas sobre una barra.
bb
bpe
x1
x 2
tpe
tb
Figura 20. Barra simplemente soportada excitada con un par de cerámicas en
contrafase
Despreciando las características pasivas del actuador (masa y rigidez)
en el modelo acoplado barra-cerámicas, encontraron los siguientes
valores para las frecuencias y amplitudes modales
ω n2 =
y
Wn =
Eb (1 + jη )tb3bb (nπ )4
12 L4 m'
(
(14a)
2VC0 d 31nπb pe
ω n2
nπ x 2
nπx1
cos
− cos
− ω t pe L m' bb L
L
2
)
2
-48-
(14b)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
donde
(x1,x2)
son las coordenadas de los bordes del actuador
tb
es el espesor de la barra
tpe
es el espesor del piezoeléctrico
bb
es la anchura de la barra
bpe
es la anchura de la cerámica
V
es el voltaje aplicado a la cerámica
d31
es el coeficiente de deformación piezoeléctrica
L
es la longitud de la barra
m’
es la masa por unidad de longitud de la barra, y
C0 = −
P=−
Eb t 2b P
(14c)
6(1 − P)
E pe 6b pebb (bb + b pe )
2
Eb (bb3 + 8b 3pe ) + 6bbb pe
(14d)
con
Epe
el módulo de Young del piezoeléctrico, y
Eb
el módulo de Young de la barra
Como vemos, las amplitudes modales dependen del voltaje aplicado,
de las dimensiones y características mecánicas de la barra, de las
dimensiones y posición del par de cerámicas, y de las características
electro-mecánicas del material piezoeléctrico.
En aplicaciones CAAE puede ser necesario usar más de un actuador
como los de la Figura 20. En este caso se puede aplicar el principio de
superposición para calcular las amplitudes modales. En concreto,
-49-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
asumiendo Na actuadores excitados cada uno de ellos con un voltaje
Vk = Ve jφk , se obtiene (Clark et al, 1991)
Wn =
(ω
2C0Vd 31nπbpe
2
n
− ω )t pe L m' ' bb
2
2
Na
∑e
k =1
jφk
nπx2 k
nπx1k
cos L − cos L
(14e)
La Figura 21 muestra la importancia del desfase entre los diferentes
actuadores. Se representan las aceleraciones modales de una barra
de 38 cm, de acero de 2 mm de espesor y 4 cm de ancha, excitada
con dos actuadores cerámicos dobles de PZT G1195 de dimensiones
(38.1x15.8x0.2) mm, situado su borde izquierdo a 76 mm y 266 mm
del extremo izquierdo de la barra. Dependiendo de que el desfase sea
0º o 180º excitamos el tercer o el segundo modo, respectivamente.
-50-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 21. Amplitudes modales de una barra de acero excitada con dos actuadores
cerámicos con un desfase de 180 º (arriba) o 0º (abajo) (Según Fuller et al, 1996)
Una vez conocido como vibra una barra simplemente soportada
sujeta a una excitación externa, es necesario calcular como radia
sonido al fluido circundante. La propagación del sonido está regida
por la ecuación de ondas. La ecuación de ondas en el dominio de la
frecuencia es la ecuación de Helmholtz. Una forma de solucionar la
ecuación de Helmholtz inhomogénea es el método de la función de
Green. La función de Green satisface la ecuación de Helmholtz
monopolar. El método de la función de Green permite calcular la
presión acústica en cualquier punto del
espacio
conocidas
la
distribución de fuentes, la presión acústica y su gradiente en una
superficie de contorno, y la función de Green y su gradiente en la
misma superficie. Cuando se elige como función de Green la del
espacio libre
e − jk − s
G (r, rs ) =
4π r − rs
r r
(15)
-51-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
donde r es el vector de posición de un punto cualquiera del espacio, y
rs es un vector de posición sobre las fuentes, el método de la función
de Green da lugar a la integral de Kirchhoff-Helmholtz. Cuando las
fuentes están en un plano infinito, la integral de Kirchhoff-Helmholtz
se convierte en la integral de Rayleigh (Hansen y Snyder, 1997)
P( r ,ω ) =
jωρ0
e − jk r − rs
"
w
dS
2π ∫S
r − rs
(16)
donde ρ0 es la densidad del medio acústico y w" es la velocidad
vertical. Esta ecuación permite calcular el campo acústico en
cualquier punto del semi-espacio, conocida la velocidad en la
dirección vertical a la superficie que vibra. Para una barra que vibra
armónicamente, w" = jωw . De las Ecs. (12) y (16), la presión acústica
radiada por la barra es entonces
ω 2 ρ0 e − jk r − rs ∞
nπx
∫
∑
P( r , ω ) = −
W
sin
dS
2π S r − rs n =1 n L
Para una geometría como la de la Figura 22
-52-
(17)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
z
θ r
bb
r
s
y
Φ
L
x
Figura 22. Geometría para la integral de Rayleigh de una barra simplemente soportada
ω 2 ρ0
P(r, ω ) = −
2π
∞
− jk
bb L
( x − x )2 + ( y − y )2 + ( z )2
s
s
s
nπ x e
W
sin
dxdy (18)
∑ n ∫∫ L
2
2
2
n =1
x
x
y
y
z
(
)
(
)
(
)
−
+
−
+
00
s
s
s
La integral de la Ec. (18) tiene solución analítica para una barra
simplemente soportada en un bafle infinito (Cunefare, 1991; Wang,
1996). La solución es finalmente
∞
P( r ,θ , Φ,ω ) = ∑ Wn q n
(19a)
n =1
con
ρ0cbb k e − jkr
q n = − jω
π αn 2r
1 − ( −1) n e − jα 1 − e − jβ
2
1 − (α / nπ ) β
(19b)
α n = nπ / L
(19c)
α = kLsinθ cosΦ
(19d)
-53-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
y
β = kbb sinθsinΦ
(19e)
y Wn depende de las fuerzas externas aplicadas, Ec. (12b).
La potencia total radiada por una fuente acústica se define como
r2
1
2
p
dS
=
Πp =
2 ρ0 c ∫S t
2 ρ0 c
2π π /2
∫∫p
t
2
sinθdθdΦ
(20)
0 0
donde S es una semi-esfera conteniendo a la fuente. Una estrategia
CAAE, similar a la usada en CAR en recintos, es minimizar la suma de
las presiones al cuadrado medidas en una serie de micrófonos, Nm.
Cuanto mayor es Nm, más se aproxima esta función de coste a la
potencia total radiada por la fuente. Es decir, se trataría de minimizar
la función de coste
Nm
2
# =
Π
∑ pt (rm ,θ m , Φ m )
p
(21a)
m=1
con
∞
(
)
pt (rm ,θ m , Φ m ) = ∑ Wnp + Wns q n ( rm ,θ m , Φ m )
n =1
(21b)
siendo Wnp y Wns las amplitudes del modo n-ésimo debido a las fuerzas
primaria y secundaria, respectivamente. Por ejemplo, para una fuente
primaria aplicada en xi (proporcionada por un vibrador, por ejemplo)
y una fuente secundaria proporcionada por un actuador cerámico
doble entre las coordenadas x1 y x2, Wnp y Wns
vendrían definidos por
las Ecs. (12d) y (14b), respectivamente. En la práctica es necesario
truncar la serie de la Ec. (21b) convenientemente. Afortunadamente,
-54-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
en aplicaciones CAAE el número de modos que es necesario
considerar es muy bajo.
Existe un método matricial más elegante de analizar la radiación
acústica de un sistema estructural. De acuerdo con Johnson y Elliott
(1995) descompongamos el radiador en una serie de radiadores
elementales, cada uno de ellos de superficie Si vibrando con una
velocidad armónica normal a la superficie vi , Figura 23.
z
P
i
y
vi
Si
L
b
b
x
Figura 23. Geometría para el cálculo de los modos radiantes de una barra simplemente
soportada
Si en una posición determinada del campo acústico, este radiador
elemental produce una presión acústica Pi, la potencia acústica
radiada será
S
Πi = i ℜ( vi* Pi )
2
(22a)
-55-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
donde
ℜ denota parte real. La potencia neta radiada por el conjunto
de radiadores elementales será
S
Π p = i ℜ( v H P)
2
donde
v
(22b)
será un vector (dx1) siendo d el número de
radiadores, y
P
será otro vector (dx1)
y H denota conjugada hermítica (traspuesta conjugada compleja).
Pero la presión acústica y la velocidad normal de vibración de la
superficie radiante están relacionadas a través de la impedancia
acústica específica, Z
P = Zv
(23)
Combinando las Ecs. (22b) y (23), obtenemos
Π p = v H Rv
(24)
donde
S
R = i ℜ( Z)
2
(25)
es una matriz puramente real, simétrica y definida positiva, ya que la
potencia es siempre mayor que cero con tal de que la velocidad de
vibración sea distinta de cero. La matriz R es proporcional a la
resistencia de radiación de cada uno de los radiadores elementales.
-56-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Los elementos diagonales son proporcionales a las auto-resistencias
de radiación de cada uno de los radiadores elementales, y los
elementos no diagonales son proporcionales a las resistencias de
radiación mutuas entre cada par de radiadores elementales.
Ambas formulaciones pueden ser conectadas sustituyendo en la Ec.
(24) la descomposición del campo de velocidad en la estructura
radiante en términos de sus modos normales
v = Φa
(26)
donde Φ sería una matriz cuyos elementos dependen exclusivamente
de las formas modales, y a sería un vector de amplitudes modales
complejas. Sustituyendo la Ec. (26) en la Ec. (24)
Π p = a H Ma
donde
M = ΦH RΦ
(27)
es una matriz de resistencias de radiación
modales. La Ec. (27) permite analizar la potencia acústica radiada en
términos del vector de las amplitudes modales y de la matriz de las
resistencias de radiación modales. Es importante enfatizar que la
matriz M (y la R) son matrices cuyos elementos fuera de la diagonal
son distintos de cero. Esto quiere decir que a la potencia radiada a
una determinada frecuencia (por ejemplo, a una frecuencia propia de
la estructura) contribuyen todos los modos. Desde el punto de vista
del CAAE, esto implica que la reducción de un modo estructural no
acarrea necesariamente la reducción de la potencia acústica radiada a
la frecuencia de ese modo.
-57-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Pero ya que la matriz R es real, simétrica y definida positiva, puede
descomponerse
en
una
serie
de
valores
y
vectores
propios
(descomposición en valores singulares)
R = Q H ΛQ
(28)
donde Q es una matriz real y unitaria de vectores propios
ortogonales, y Λ es una matriz diagonal de valores propios, λi, los
cuales son todos números reales positivos. Sustituyendo la Ec. (24)
en la Ec. (22)
d
Π p = y H Λy = ∑ λ i y i
2
(29)
i =1
donde
y = Qv .
Cada uno de los términos de esta suma se denomina
un modo radiante. La potencia acústica radiada por la estructura se
obtiene sumando el producto de
las amplitudes al cuadrado de los
modos radiantes por su correspondiente valor propio. Ya que los
modos radiantes radian independientemente uno de otro, una
estrategia CAAE muy interesante sería actuar sobre los modos
radiantes. A diferencia de los modos estructurales, la reducción de un
modo radiante garantiza la reducción de la potencia total radiada a
esa frecuencia. Para poder aplicar esta estrategia, sería necesario
desarrollar sensores capaces de medir los modos radiantes.
Las formas de los modos radiantes dependen de los vectores propios
de R, y aunque esta es una función de la geometría de la estructura,
es independiente de sus propiedades dinámicas. Así pues, el
contenido modal estructural de la superficie vibrante afectará a las
amplitudes de los modos radiantes, pero no a su forma modal o a su
eficiencia de radiación.
-58-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Para el caso de una barra de longitud L, dividida en una serie de I
radiadores elementales, la matriz R de resistencias de radiación
resulta ser (Elliott y Johnson, 1993)
sin( kr12 )
1
kr12
(
ω 2 ρS 2 sin kr21)
1
R=
4πc kr21
...
...
sin( krI 1) sin( krI 2 )
krI 1
krI 2
sin( kr1I )
kr1I
sin( kr2 I )
...
kr2 I
...
...
1
...
...
(30)
donde rij es la distancia entre los elementos i y j de la barra. Como
vemos, la matriz R es simétrica (Rij=Rji). Se define la eficiencia de
radiación como
σ=
Πp
(31)
ρcST v 2 (t )
donde ST es la superficie total del radiador y
v 2 (t )
es la velocidad
normal cuadrática media promediada espacialmente. Cuando la
potencia acústica radiada está dominada por un modo estructural (a
una frecuencia de resonancia de la estructura) ,
velocidad cuadrática media promediada espacialmente es
σii =
2 Mii
ρcST
2
Πii = ai Mii ,
la
2
ai / 2 , y
(32)
-59-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Podemos entonces definir una matriz normalizada
Σ=
2
M
ρcST
(33)
cuyos elementos diagonales (σii) son las eficiencias de radiación de
cada modo actuando aisladamente (auto-eficiencias de radiación), y
cuyos elementos no diagonales (σij) son las eficiencias de radiación
mutua normalizadas. La Figura 24 muestra las auto-eficiencias de
radiación del primer (σ11), segundo (σ22) y tercer modo estructural
(σ33)
de una barra simplemente soportada con (bb/L)=1/64, y la
eficiencia de radiación mutua (σ31=σ13) entre el primer y el tercer
modo estructural.
Nótese que en una barra simplemente soportada, como señalaba
Cunefare (1991), no hay interacción entre los modos pares e
impares, por lo que las correspondientes eficiencias de radiación
mutua (por ejemplo σ12) serán cero. Las eficiencias de radiación de
los modos radiantes son proporcionales a los valores propios de la
matriz R. La Figura 25 muestra las eficiencias de radiación de los tres
primeros modos radiantes de la misma barra simplemente soportada
usada en la Figura 24.
-60-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 24. Eficiencias de auto-radiación y de radiación mutua de los tres primeros
modos de una barra simplemente soportada, para (bb/L)=1/64 (Según Elliott y Elliott,
1993)
Figura 25. Eficiencias de radiación de los tres primeros modos radiantes de una barra
simplemente soportada, para (bb/L)=1/64 (Según Elliott y Johnson, 1993)
La Figura 26 muestra las formas modales de los cuatro primeros
modos
radiantes
de
una
barra
simplemente
soportada
para
frecuencias de excitación dadas por kL = 0.1, 1 y 10. Vemos como
para kL≤1, las formas de estos modos radiantes corresponden a los
de un pistón (primero), una variación de velocidad lineal (segundo),
cuadrática (tercero) y cúbica (cuarto). De hecho, para kL pequeño,
estas formas modales son muy similares a las de los polinomios
ortogonales de Legendre.
-61-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 26. Formas modales de los cuatro primeros modos radiantes de una barra
simplemente soportada, para kL=0.1 (arriba), kL=1 (centro), y kL=10 (abajo) (Según
Elliott y Johnson, 1993)
-62-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
De la Figura 25 es claro que el primer modo radiante tiene una
eficiencia mayor que la del resto de modos radiantes. Como podemos
apreciar en la Figura 26, el primer modo es constante a lo largo de la
barra.
Por
consiguiente,
se
trata
de
un
modo
volumétrico,
proporcional a la velocidad de volumen de la superficie radiante. Es
decir, un sistema CAAE capaz de medir y controlar la velocidad de
volumen de la superficie radiante sería efectivo para cancelar el
primer modo radiante de la estructura, y por consiguiente, gran parte
de la potencia acústica radiada en baja frecuencia (Johnson et al,
1993).
El CAV o el CAAE requieren la medida de modos, ya sean
estructurales en el primer caso, o radiantes en el segundo, para su
posterior control mediante los actuadores correspondientes. Las
formas modales se pueden medir mediante arrays de sensores
puntuales
(por
ejemplo,
acelerómetros)
o
mediante
sensores
distribuidos (por ejemplo, PVDF). Los arrays de sensores puntuales
tienen la ventaja de que se pueden hacer adaptativos y la desventaja
de que requieren un procesado de señal antes de ser introducidos en
el controlador. Los sensores distribuidos tienen la ventaja de que
efectúan ya un cierto filtrado espacial, por lo que son capaces de
proporcionar las formas modales directamente al controlador, pero
tienen la desventaja de que poseen una forma fija por lo que
proporcionan una información que no puede ser variada a lo largo del
proceso de control.
La Figura 27 muestra el esquema de un array de sensores puntuales.
Volviendo a la Ec. (10a),
∞
w( x) = ∑ Wnψ n ( x) = ΨW ,
n =1
donde
Ψ
es
una matriz de formas modales, y W es un vector de amplitudes
-63-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
modales. Siempre que la matriz ψ sea no singular, se puede calcular
su inversa, para obtener
W = Ψ−1w
(34a)
que permite obtener las amplitudes modales en función de la matriz
inversa de las formas modales y del vector de medidas.
Salida
Sumador
Ganancias
Sensores
Estructura
Figura 27. Esquema de un array de sensores puntuales
Es evidente de la Ec. (34a) que para obtener las amplitudes de los
primeros N modos necesitamos al menos N sensores puntuales. Es
decir, para aplicar este método se requiere :
• Un sistema de adquisición multicanal.
• Un modelo que proporcione la matriz de formas modales.
• Un post-proceso que implemente la Ec. (34a).
• Un muestreo espacial suficiente para evitar que ocurra aliasing
espacial (la separación entre sensores ha de ser menor o igual que
media longitud de onda de la máxima frecuencia que se requiere
medir).
-64-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Para hacer más robusto este método se pueden usar más sensores
puntuales que amplitudes modales requeridas. En este caso, la matriz
ψ no es cuadrada, y para obtener las amplitudes modales aplicamos
la ecuación
−1
W = [ΨT Ψ] ΨT w
(34b)
Hasta ahora hemos analizado el campo acústico radiado en el dominio
(x,f). Es interesante analizar el campo acústico en el dominio (k,f).
Para ello, partimos de la ecuación de Helmholtz en las variables (x,z),
es decir
( ∇ 2 + k 2 ) P( x , z ) = 0
(35a)
y trasnformamos mediante Fourier desde la variable x a la variable
kx, para obtener
∂2
2
2
k − k x + 2 P( k x , z ) = 0
∂z
(35b)
que tiene la solución
P( k , z) = Ae − jk z z
donde A es una constante y
(36)
k z = k 2 − k x2
es el número de onda
en la dirección z. La solución consiste en una onda plana que se
propaga en la dirección del eje z. Esta onda puede ser:
• Una onda propagante, cuando k ≥ kx.
-65-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
• Una onda evanescente, cuando k < kx.
Para el cálculo de la constante A necesitamos imponer condiciones de
contorno. Para un radiador plano, la ecuación linealizada para la
conservación del momento requiere que en la superficie
jωρv( x) +
∂
P ( x , z) = 0
∂z
(37a)
o, en el dominio (kx,f)
jωρV ( k x ) +
∂
P( k x , z ) = 0
∂z
(37b)
De las Ecs. (36) y (37b) se obtiene
A = ωρV ( k x ) / k z
(38)
Y sustituyendo en la Ec. (36)
P( k x , z ) =
ωρV ( k x ) − jk z z
e
kz
(39a)
Aplicando la transformada de Fourier inversa, se obtiene finalmente el
campo acústico en el dominio (x,z,f)
ωρ
P ( x, z ) =
4π 2
V (k x )e − j (k x x+ k z z )
dk x
∫
kz
−∞
∞
La potencia acústica radiada sería entonces
-66-
(39b)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
2
ωρ ∞ V ( k x )
Π p = 2 ℜ ∫
dk x
8π
−∞ k z
(40a)
Teniendo en cuenta que 1/kz es real solo si
k = (ω / c) ≥ k x ,
podemos poner
2
V (k x )
ωρ
Π p = 2 ℜ ∫
dk x
8π
k ≥ k x k 2 − k x2
(40b)
• Cuando k≥kx, kz es real y se radiará potencia acústica al campo
lejano. Los valores del número de onda que satisfacen esta
condición se denominan supersónicos.
• Por el contrario, cuando k<kx, kz es puramente imaginario, y la
potencia
acústica
decaerá
rápidamente
con
la
distancia
de
propagación (propagación evanescente). Los valores del número de
onda que satisfacen esta condición se denominan subsónicos.
La representación del campo estructural en el dominio (kx,f) ayuda a
determinar que modos estructurales radiarán energía acústica al
campo lejano, Figura 28.
Por consiguiente, es muy útil poder estimar el campo estructural de
una superficie vibrante en el dominio del número de onda. Por
ejemplo, podemos usar un array de sensores puntuales, y aplicar una
versión discreta de la transformada de Fourier, para obtener
I
V ( k x ) = ∑ v( xi )e jk x xi ∆x
(41)
i =1
-67-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
V(kx
)
Región subsónica
Región supersónica
-k
k
k
x
Figura 28. Representación del campo estructural en el dominio del número de onda
Fuller et al (1996) demuestran que la carga eléctrica de salida, q(t),
de un sensor distribuido está dada por
∞
q(t ) = ∑ Wn Bn
(42)
n =1
donde Wn son las amplitudes modales de la estructura, y
∂ 2ψ n
Bn = −( tb + t s )e31 ∫ f ( x)
2 dx
∂
x
0
LS
tb
y
ts
son
los
espesores
de
la
estructura
(43)
y
del
sensor,
respectivamente, e31 es la constante de tensión piezoeléctrica del
sensor, ψn son los modos normales de la estructura, Ls es la longitud
del sensor, y f(x) es una función de forma del sensor distribuido.
Debido a la ortogonalidad de los modos normales, es evidente que si
se elige la función de forma del sensor proporcional a la segunda
-68-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
derivada de un modo normal, la integral de la Ec. (43) será
proporcional a ese modo normal. En otras palabras, se habrá
diseñado un sensor modal que responderá a un modo estructural.
Nótese que para el caso de modos senoidales, ψ n ≈ sin(k n x ) , y
∂ 2ψ n / ∂x 2 ≈ sin(k n x ) . Es decir, para modos senoidales, los sensores
distribuidos deberán tener una sensibilidad proporcional a la forma
del modo que se quiere medir. En este caso
qn = −( tb + t s )e31Kn Λ n LsWn
(44)
donde Kn es una constante relacionada con la ganancia del sensor, y
Λn es una constante de normalización dada por
1 Ls 2
∫ ψ dx
Λn =
Ls 0 n
(45)
La Figura 29 muestra las formas de dos sensores didtribuidos para los
dos primeros modos de una barra simplemente soportada.
Figura 29. Formas de dos sensores distribuidos para medir los dos primeros modos de
una barra simplemente soportada (Según Fuller et al, 1996)
-69-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Para el primer modo, la anchura del sensor es mayor donde la
deformación es mayor. Para el segundo modo, la polarización es
positiva en el lado izquierdo y negativa en el lado derecho, en
consonancia con la respuesta del segundo modo de una barra
simplemente soportada. La mayor parte de los sensores distribuidos
se suelen hacer con PVDF, debido a su flexibilidad, ligereza, a sus
propiedades como sensor discutidas en la Sección 2.1, y a que se
puede cortar fácilmente para darle la forma apropiada. Un aspecto
importante en el diseño de sensores piezoeléctricos es la alta
impedancia de entrada que se requiere para medir su carga eléctrica
sin fugas, por lo que son necesarios amplificadores de voltaje de
impedancia de entrada alta. La Figura 30 muestra el esquema de un
circuito amplificador típico para un sensor de PVDF.
Figura 30. Circuito amplificador para un sensor de PVDF
-70-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Scott y Sommerfeldt (1997) realizaron una comparación numérica de
la estimación de la potencia acústica radiada al campo lejano usando
un array de sensores puntuales y arrays de
sensores PVDF
distribuidos. En su modelo numérico usaban una barra de longitud L
sujeta por sus extremos. En primer lugar solucionaban la ecuación de
Euler-Bernouili para obtener la vibración vertical de la superficie de la
barra en términos de sus modos normales. Usando la Ec. (40b)
calculaban la potencia acústica radiada al campo lejano a partir de la
velocidad de vibración en el dominio (k,f). A continuación comparaban
esta respuesta teórica en el dominio (k,f) con la que se podría
estimar con arrays discretos de sensores puntuales y distribuidos. La
función de forma para los sensores distribuidos usada por estos
autores es
f ( x) = h( x − xs ) sinc[ kc ( x − xs )]
(46a)
donde xs es la posición central del sensor, kc es un número de onda
positivo de corte (para proporcionar un filtrado paso bajo),
(
054
. + 0.46 cos 2πx / l p
h( x) =
0
)
−a ≤ x ≤ b
x < −a , x > b
(46b)
es una ventana Hamming, lp es la longitud total del sensor, xs-a y
xs+b corresponden a las posiciones mínima y máxima del sensor
distribuido, y
sinc( x) = sin( x) / x
(46c)
Nótese que la longitud de la ventana Hamming, lp, es elegida para
proporcionar el efecto de filtrado deseado, y no es necesariamente
igual a a+b. En definitiva, la función de forma es el producto de una
-71-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
ventana Hamming, para suavizar los efectos de truncamiento, y de
una ventana sinc, para proporcionar filtrado paso-bajo en el dominio
del número de onda. La Figura 31 muestra un esquema de las
posiciones y formas resultantes para los 6 sensores distribuidos.
También se incluyen las posiciones de los 6 sensores puntuales
usados en la comparación.
Figura 31. Posiciones de los sensores puntuales y distribuidos en la barra (Según Scott
y Sommerfeldt, 1997)
-72-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 32. Respuesta estructural de la barra para el tercer modo (216.52 Hz). ___
respuesta teórica, --- respuesta del array de sensores distribuidos, _._ respuesta del
array de sensores puntuales (Según Scott y Sommerfeldt, 1997)
La Figura 32 muestra la comparación entre la respuesta estructural
teórica de la barra, en el dominio del número de onda, en
comparación con las que se obtendrían de los arrays de sensores
puntuales y distribuidos, para la tercera resonancia de la barra
(216.52 Hz). La superioridad de la respuesta de los sensores
distribuidos es evidente en la Figura 32, y en otras comparaciones
contenidas en el trabajo de los autores. En concreto, las predicciones
de la potencia radiada se desvían de la teórica en unos 3 dB como
máximo en el caso de los sensores distribuidos, y en más de 60 dB en
el caso de los sensores puntuales.
5. CAAE 2D: PLACAS
El procedimiento usado para el caso 1D puede ser extendido al caso
2D. El objetivo del CAAE es reducir el campo acústico radiado al
campo lejano actuando sobre la estructura radiante. Si podemos
analizar teóricamente el acoplamiento acústico-estructural de la
superficie vibrante, se puede acometer teóricamente también el
problema del controlador. Al igual que en el caso de la barra
simplemente soportada, es posible llevar a cabo este análisis teórico
en el caso de una placa rectangular simplemente soportada. Para ello
necesitamos:
• Calcular la respuesta estructural de la placa, resolviendo la
ecuación de ondas con condiciones de contorno apropiadas.
• Resolver la ecuación de Rayleigh para calcular la presión acústica
radiada a partir de la respuesta estructural de la placa.
-73-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
• Definir una variable acústica proporcional a la suma sobre una serie
de sensores de la presión acústica al cuadrado. Esta variable es la
potencia acústica radiada.
Al igual que en el caso 1D, es posible aplicar una descomposición en
valores singulares para calcular los modos radiantes a partir de la
respuesta modal del sistema. En este caso, se pueden usar sensores
estructurales en lugar de sensores acústicos para reducir el campo
acústico radiado. Estos sensores pueden ser puntuales o distribuidos.
Análogamente al caso 1D, veremos que la formulación del problema
es mucho más elegante en el dominio transformado (kx,ky). Veremos
que los modos que radian energía acústica al campo lejano son
aquellos para los que el número de onda en la dirección perpendicular
a la placa son menores que el número de onda acústico (modos
supersónicos).
Analicemos
primero
el
problema
estructural.
Sea
una
placa
rectangular delgada de dimensiones (a,b,tp) como la de la Figura 33,
donde el espesor tp es pequeño comparado a la longitud de onda
(esta hipótesis limita el modelo al margen de las frecuencias bajas).
Ignorando ondas de cizalla y rotacionales, la ecuación diferencial que
gobierna la vibración normal a la placa, w, es
∂ 4w
∂ 4w
∂ 4w
∂ 2w
EI 4 + 2 2 2 + 4 + ρ t p 2 = − p ( x, y, t )
∂x ∂y
∂y
∂t
∂x
(47)
donde E es el módulo de Young de la placa, I es el momento de
inercia por unidad de anchura, y p es la presión o carga externa
aplicada. Recordemos también que
-74-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
EI =
t p3 E
(48)
12(1 − ν 2 )
donde ν es el coeficiente de Poisson de la placa.
z
y
b
w(x,y)
a
x
Figura 33. Sistema de coordenadas para el estudio de la placa
Ensayando la solución de onda plana armónica
j ωt − k x − k y
w( x, y, t ) = Ae ( x y )
(49)
y sustituyendo en la Ec. (47), se encuentra que
-75-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
k x2 + k y2 =
ρ Sω 2
= k 2f
EI
(50)
donde kf es el número de onda libre. Las componentes del número de
onda en las direcciones x e y están relacionadas con el número de
onda libre por
k x = k f cosα
k y = k f sinα
(51)
La Ec. (51) nos dice que la onda libre se propaga formando un ángulo
α con el eje x a la velocidad de las ondas flexionales. En una placa de
dimensión finita, ocurrirán resonancias cuando las componentes del
número de onda en las direcciones x e y igualen a un valor propio en
cada una de estas direcciones.
Consideremos primero el caso sencillo de la vibración libre (p=0) de
una placa delgada rectangular simplemente soportada. Ensayando la
solución separable
wmn ( x, y, t ) = Wmn sin( km x) sin( k n y)e jωt
(52)
donde Wmn es la amplitud modal, (m,n) son índices modales,
sustituyendo en la Ec. (47), y aplicando condiciones de contorno de
soporte simple (desplazamiento cero en los bordes de la placa), se
obtiene (Fuller et al, 1996)
km = mπ / a m = 1,2,3,..
k n = nπ / b n = 1,2,3,..
(53)
con
-76-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
1/ 2
ω mn
Et 2p
=
12 ρ (1 − ν 2 )
mπ 2 nπ 2
+
a b
(54)
los valores propios. Cada par de valores (m,n) da lugar a un modo de
vibración. La Figura 34 muestra los modos (1,1) , (2,1) , (3,1) y (1,3)
normalizados a la unidad de una placa delgada.
Figura 34. Modos de vibración libre de una placa delgada simplemente soportada
Vemos como el modo (m,n) tiene m-1 líneas nodales en la dirección x
y n-1 líneas nodales en la dirección y.
A continuación analizaremos la vibración de una placa delgada
rectangular sometida a una fuerza armónica arbitraria F ( x, y)e jωt . Igual
que en el caso de vibración libre, asumimos una solución en términos
de modos normales del tipo
-77-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
∞
∞
w( x, y, t ) = ∑∑ Wmn sin(k m x )sin(k n y )e jωt
(55)
m =1 n =1
Sustituyendo esta solución en la Ec. (47), y usando la propiedad de
ortogonalidad de los modos normales, obtenemos para las amplitudes
modales
a b
Wmn =
M (ω 2mn
4
F ( x, y ) sin(k m x )sin(k n y )dxdy
2
− ω + 2 jηωω mn ) ∫0 ∫0
(56)
donde M = ρ s ab es la masa total de la placa, y η es el factor de
pérdidas. Las amplitudes modales dependen de la fuerza exterior
aplicada a la placa. Se analizarán cuatro casos (Figura 35):
•
Una fuerza puntual (por ejemplo un vibrador).
•
Una excitación por una distribución de presión uniforme.
•
Una onda plana incidiendo oblícuamente en la placa. Sistemas
estructurales perturbados con entradas aéreas tienden a radiar o
transmitir niveles sonoros más altos que cuando son excitados con
entradas estructurales (para la misma frecuencia y amplitud)
(Fuller et al, 1996).
•
Un actuador cerámico formado por dos cerámicas rectangulares en
contrafase, una a cada lado de la placa.
Fuller et al (1996) usan la siguiente definición para las amplitudes
modales
Wmn =
ρ t p (ω
2
mn
Pmn
− ω 2 + 2 jηωω mn )
(57a)
-78-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
donde
a b
Pmn =
4
F ( x, y ) sin(k m x )sin(k n y )dxdy
ab ∫0 ∫0
(57b)
Figura 35. Sistema de coordenadas para el análisis de una placa delgada simplemente
soportada excitada por una fuente puntual, por una distribución de presión uniforme,
por un actuador cerámico, y por una onda plana incidiendo oblícuamente (Según Fuller
et al, 1996)
Si la fuerza aplicada es puntual, F ( x, y ) = Fδ ( x − x f )δ ( y − y f ) , y
-79-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Pmn =
4 F mπx f
sin
ab
a
nπ y f
sin
b
(58a)
Las amplitudes modales dependen:
•
De la amplitud de la fuerza aplicada, F.
•
De la posición de la fuerza aplicada (xf,yf).
•
De la frecuencia.
Cuando se aplica una fuerza uniforme de amplitud Q a1 ≤ x ≤ a2
, b1 ≤ y ≤ b2 , resulta
Pmn =
4Q
[cos(mπa1 / a ) − cos(mπa2 / a )][cos(nπb1 / b ) − cos(nπb2 / b )]
mnπ 2
(58b)
Las amplitudes modales dependen:
•
De la amplitud de la fuerza aplicada, Q.
•
De la posición de la fuerza aplicada (a1, b1 , a2, b2).
•
Del orden del modo (m,n).
•
De la frecuencia.
Cuando la placa se excita por una onda plana que incide oblícuamente
en la placa, F ( x, y, t ) = Pi e
(
j ωt − k x xsinθ i cos φ i − k y ysinθ i sinφ i
Pmn = 8 Pi I m ,i I n ,i
)
, entonces
(58)
donde
-80-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
I m ,i
− ( j / 2) sgn( sinθ i cos φi ) si (mπ )2 = {sgn (α i )}2
=
1 − (−1) m e − jαi )
2
2
si (mπ ) ≠ {sgn (α i )}
mπ [(α / mπ )2 − 1 ]
i
I n ,i
− ( j / 2) sgn( sinθ i sinφ i ) si (nπ )2 = {sgn (β i )}2
=
1 − (−1) n e − jβ i )
2
2
si (nπ ) ≠ {sgn (β i )}
nπ [(β / nπ )2 − 1 ]
i
{
}
{
}
y
α i = k a sinθ i cos φ i
β i = k b sinθ i sinφ i
Las amplitudes modales dependen:
•
De la amplitud de la onda plana, Pi.
•
Del ángulo de incidencia la posición de la fuerza aplicada (αi, βi).
•
Del orden del modo (m,n).
•
De la frecuencia
Por último, cuando la excitación se produce por un actuador cerámico
doble en x1 ≤ x ≤ x2 y y1 ≤ y ≤ y2
Pmn =
4C 0 S pe
mnπ
2
(k
2
m
)
+ k n2 [cos(mπx1 / a ) − cos(mπx2 / a )]
[cos(nπy1 / b ) − cos(nπy2 / b )]
donde
[(
2
)
− t 2p ](1 − ν p )
C0 =
2 E pe [(t p + 2t pe )3 − t 3p ](1 − ν p ) + 2 E p h 3p (1 − ν pe )
3E p I p E pe t p + t pe
-81-
(58d)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
es una constante que depende de las propiedades y geometrías de la
combinación actuador/placa, siendo E, y ν el módulo de Young, el
coeficiente de Poisson y el espesor, respectivamente, tp es el espesor
de la placa, 2tpe es el espesor de la cerámica, I es el momento de
inercia para ondas de flexión, y los subíndices p y pe indican placa y
piezoeléctrico,
respectivamente.
Además,
S pe = (d 31V / t pe ),
es
la
deformación producida en la cerámica cuando se le aplica el voltaje V.
Las amplitudes modales dependen:
•
Del voltaje aplicado a la cerámica, V.
•
De la posición de la cerámica (x1, y1, x2, y2).
•
Del orden del modo (m,n).
•
De las propiedades electro-mecánicas de la cerámica.
•
De la frecuencia.
Una vez conocido como vibra la estructura, podemos aplicar la
integral de Rayleigh, Ec. (16)
P( r ) = ∫
S
jωρ0 w" (rs )e − jkR
dS
2πR
donde ρo es la densidad del medio acústico, y r, rs y R son los
vectores que se muestran en la Figura 36.
-82-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
z
y
r
R
b
θ
y
.
w(r
s
φ
)
rs
x
baffle infinito
a
x
Figura 36. Sistema de coordenadas para el cálculo de la presión acústica radiada por
una lámina delgada en un baffle infinito
Usando coordenadas esféricas, y en la aproximación de campo lejano
(R>>a,b)
R ≈ r − xsinθ cos φ − ysinθsinφ
(59)
en la exponencial exp(-jkR), mientras que R ≅ r en el denominador.
Derivando en la Ec. (58)
mπx nπy
w" ( rs ) = ∑ ∑ W"mn sin
sin
a b
m n
(60a)
donde
W" mn =
ρt p (ω
2
mn
jωPmn
− ω 2 + j 2ηωω mn
(60b)
)
y sustituyendo en la ecuación de la integral de Rayleigh
-83-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
jωρo e − jkr
P(r ,θ , φ ) =
2πr
mπx nπy
∑m ∑n W"mn ∫ ∫ sin a sin b e j (( αx/a )+( βy/b) )dxdy (61a)
0 0
a b
con
α = kasinθ cosφ
β = kbsinθsinφ
(61b)
La integral doble de la Ec. (61a) tiene solución analítica. El resultado
final es (Fuller et al, 1996)
P(r , θ , φ ) =
jωabρo e − jkr
2π 3r
W"mn ( −1) m e − jα − 1 ( −1) n e − jβ − 1
∑m ∑n mn (α / mπ )2 − 1 β / nπ 2 − 1
)
(
(62)
Como vemos, el campo acústico radiado al campo lejano por la placa
delgada, simplemente soportada, sometida a una excitación puntual
armónica, depende de:
• La posición en el campo acústico, a través de r, α, y β.
• Las características de la fuerza exterior aplicada, a tarvés de W"mn .
• La frecuencia de excitación.
La intensidad acústica radiada al campo lejano puede obtenerse de
P (r , θ , φ )
I (r , θ , φ ) =
2 ρ0 c0
2
(63)
La contribución del modo (m,n) a la intensidad acústica será entonces
-84-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
2
cos α cos β
2
2
2 kab
P ( rθ , φ )
sin 2 sin 2
I mn (r , θ , φ ) = mn
= 2 ρ 0 c0 W" mn 3
(64)
2
2
2 ρ 0 c0
π rmn (α / mπ ) − 1 (β / nπ ) − 1
[
][
]
donde
cos(α/2)
se usa cuando m es un entero impar
sin(α/2)
se usa cuando m es un entero par
cos(β/2)
se usa cuando n es un entero impar, y
sin(β/2)
se usa cuando n es un entero par.
Hemos visto antes, Ec. (20),
que la potencia acústica radiada al
campo lejano se puede calcular de
π / 2 2π
Πp =
∫∫
0
0
2
P (r , θ , φ ) 2
r sinθ dθ dφ
2 ρ0c0
y la eficiencia de radiación del modo (m,n) es, Ec. (31)
Π mn
σ mn =
donde
w" mn
w" mn
2
2
ρ0c0 ab
es el promedio espacial y temporal de la velocidad de
vibración del modo (m,n) de la lámina, el cual en este caso sencillo es
2
W"mn / 8 . Sustituyendo la Ec. (62) en la Ec. para la potencia radiada al
campo lejano por el modo (m,n) y ésta dentro de la Ec. para la
eficiencia de radiación, resulta finalmente
-85-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
2
σ mn
cos α cos β
π / 2 2π
16(ka)(kb)
sin 2 sin 2
=
sinθ dθ dφ
π 6 m2 n 2 ∫0 ∫0 (α / mπ )2 − 1 (β / nπ )2 − 1
][
[
]
(65)
La solución de la Ec. (65) no es fácil. Algunos autores han sido
capaces de resolverla en el límite de bajas frecuencias. En concreto,
sea el número de onda estructural
nπ
mπ
k =
+
a
b
2
2
(66)
2
b
Cuando k>>kb, la longitud de onda estructural es mucho mayor que
la longitud de onda acústica, y la eficiencia de radiación de todos los
modos tiende a la unidad. En estas condiciones no hay interferencia
apreciable entre las distintas células de la placa. La frecuencia a la
cual la longitud de onda estructural iguala a la longitud de onda
acústica se denomina frecuencia crítica. Su valor es
c02
c02
f =
=
18
. c L t p 18
. tp
c
ρ(1 − ν 2 )
E
(67)
donde cL = E / ρ(1 − ν 2 ) es la velocidad de ondas longitudinales en la
placa. La frecuencia crítica es entonces una característica importante
en el acoplamiento acústico-estructural de una placa. Por encima de
la frecuencia crítica, no hay interferencia significativa entre las
distintas partes de la placa y su radiación es independiente del orden
modal. Por debajo de la frecuencia crítica, las distintas partes de la
placa interfieren, y se puede resolver la Ec. (65). En este margen de
frecuencias, Wallace (1970) proporciona el siguiente resultado.
-86-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
• Para (m,n) impares
σ mn
32( ka )( kb) k 2 ab
8 a
8
≈ 5 2 2 1 −
+ 1 −
1 −
2
12 (mπ ) b (nπ ) 2
π m n
b
a
(68a)
b
a
(68b)
• Para m impar y n par
σ mn
3
8( ka )( kb) k 2 ab
8 a
24
1−
+ 1 −
≈
1 −
2
5 2
2
20 ( mπ ) b (nπ ) 2
3π m n
• Para m par y n impar
σ mn ≈
3
8( ka ) ( kb) k 2 ab
24 a
8
1−
+ 1 −
1 −
2
5 2
2
20 ( mπ ) b (nπ ) 2
3π m n
b
a
(68c)
• Para (m,n) pares
σ mn ≈
3
3
2( ka ) ( kb) 5k 2 ab
24 a
24 b
1
1
1
−
−
+
−
2
64 ( mπ ) b ( nπ ) 2 a
15π 5m2 n 2
(68d)
La Figura 37 muestra las eficiencias de radiación obtenidas de las Ecs.
(68) para los modos seleccionados de una placa delgada de
dimensiones a=1 m y b=1 m.
-87-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 37. Eficiencias de radiación obtenidas de las Ecs. (65) para los modos indicados
de una placa delgada de a=1 m y b=1 m
Las eficiencias radiantes de todos los modos deberían tender a la
unidad cuando el número de onda tiende a uno. Como vemos, las
curvas obtenidas de las Ecs. (68) no son válidas a medida que nos
aproximamos al número de onda estructural, kb. En este margen de
frecuencias, Wallace (1970) resolvía la Ec. (65) mediante integración
numérica. La Figura 38 muestra las eficiencias de radiación obtenidas
por Wallace para los mismos modos de la Figura 37.
-88-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 38. Eficiencias de radiación para los modos seleccionados de una placa
cuadrada (Según Wallace, 1970)
Una simplificación importante se obtiene cuando a=b y ka,kb<<1.
Entonces
σ mn
32( ka ) 2
5 2 2
π m n4
8( ka )
≈ 5 2 2
3π m n6
2( ka )
15π 5m2 n 2
si (m,n) es impar
si m impar y n par, o viceversa
si (m,n) es par
(69a)
Nótese que para una placa delgada en las condiciones de la Ec. (69a)
σ mn, impares
σ m ' n ', pares
240 m' n'
≈
(ka )4 mn
2
(69b)
-89-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
que en el límite que estamos analizando ka << 1 es mayor que la
unidad para órdenes modales relativamente bajos. Recordando que la
eficiencia modal para una misma frecuencia se reduce a medida que
se incrementan los órdenes modales, los modos impares son siempre
más eficientes que los modos pares para radiar potencia acústica en
baja frecuencia.
La dependencia de σmn con ka muestra que estos modos estructurales
exhiben eficiencias de radiación que son características de fuentes
monopolares, para (m,n) impares, dipolares, cuando la paridad de m
y n es distinta, y cuadripolares, cuando (m,n) son pares. La Figura
39 ilustra este comportamiento de una placa delgada en baja
frecuencia.
+
+
+
+
m impar, n impar
+
monopolo
m par, n impar
dipolo
-
+
+
-
-
-
+
m impar, n par
dipolo
m par, n par
cuadripolo
-
+
+
-
Figura 39. Radiación modal de una placa delgada en baja frecuencia
Fahy (1985) demostraba que cuando la longitud de onda acústica es
tal que ka<<mπ y kb<<nπ, la intensidad radiada por la placa nunca
supera a la que produciría una única célula de la placa actuando
separadamente. Una célula sería aquella parte de la placa limitada
-90-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
por las líneas nodales del modo. Esto demuestra que la radiación de
baja frecuencia de una placa delgada está determinada por la
interferencia entre las distintas células en las que puede ser dividida.
La interferencia destructiva entre las contribuciones de células
adyacentes tiene un efecto profundo en las características del campo
radiado (Figura 40).
Figura 40. Cancelación entre células adyacentes para los modos pares e impares de
una placa delgada en baja frecuencia (kL<<1) (Según Fahy, 1985)
La radiación de las semi-células a cada lado de una línea nodal se
cancelan mutuamente, por lo que sólo radian sonido las semicélulas
de las esquinas. La fase relativa entre estas “fuentes monopolares en
las esquinas” determina que la radiación sea del tipo monopolar,
dipolar o cuadripolar, Figura 39.
En la formulación anterior hemos analizado la potencia acústica (o la
eficiencia de radiación) de un modo único de la placa. En la práctica,
sin embargo, a una frecuencia dada contribuyen todos los modos de
la placa. Esto es especialmente relevante cuando la frecuencia de
excitación no coincide con un modo propio de la placa (excitación
forzada). En este caso hay que considerar la contribución global de
-91-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
todos los modos (o más bien, un número finito pero suficiente de
modos, si truncamos el desarrollo modal). Reescribamos de nuevo la
Ec. (60a) como
M
N
w" ( x , y , t ) = ∑ ∑ W"mnψ mn ( x , y )e jωt
(70a)
m= 1 n = 1
donde W"mn son las amplitudes modales, que dependen de la fuerza
aplicada, y
mπx nπy
ψ mn ( x, y ) = ψ m ( x)ψ n ( y ) = sin
sin
a b
(70b)
son los modos propios. La Ec. (70b) enfatiza el hecho de que los
modos propios de una placa delgada simplemente soportada son
funciones separables en modos en las direcciones x e y. La Ec. (70a)
puede ponerse también en forma matricial como
" T Ψ( x, y)
w" ( x , y ) = w
(70c)
donde
" T = [W"01 W"10 W"11 .....W" MN ] es una vector de amplitudes modales, y
w
Ψ T ( x , y ) = [ψ 0 ( x )ψ 1 ( y ) ψ 1 ( x )ψ 0 ( y ) ψ 1 ( x )ψ 1 ( y )...ψ M ( x )ψ N ( y )]
es
un
vector de modos propios
La extrapolación de la Ec. (40b) al caso 2D nos permite calcular la
potencia acústica radiada en el dominio transformado (kx,ky)
2
W" (k x , k y )
ωρ 0
dk x dk y
Π p = 2 ℜ ∫∫
2
2
2
8π
k x2 + k 2y ≤ k k − k x − k y
-92-
(71a)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
En el caso 2D que nos ocupa
(
W" k x , k y
)
2
(
" T Ψ kx , ky
= w
)
2
(
) (
)
" H Ψ * kx , ky ΨT kx , ky w
"
=w
(71b)
y
(
∞ ∞
) ∫ ∫ ψ ( x , y )e
ψ kx , ky =
j ( kx x + k y y )
dx dy
−∞ −∞
Sustituyendo la Ec. (71b) dentro de la Ec. (71a) resulta finalmente
" H Mw
"
Πp = w
(71c)
∞ ∞
Ψ * ( k x , k y )Ψ T ( k x , k y )
ωρ0
M = 2 ℜ ∫ ∫
dk x dk y
8π
k 2 − k x2 − k y2
−∞−∞
(72a)
donde
Los elementos diagonales de la matriz M representan las resistencias
de auto-radiación de los modos de la placa actuando aisladamente, y
los elementos fuera de la diagonal representan las resistencias de
radiación mutua entre los diferentes modos de la placa. Así pues, si
denotamos un modo por los índices (m,n) y otro por los índices (m’n’)
, un elemento de esta matriz será
M mn ,m'n '
*
*
ωρ0 ψ m ( k x )ψ n ( k y )ψ m ' ( k x )ψ n ' ( k y )
dk
dk
= 2 ℜ∫ ∫
x
y
8π
k 2 − k x2 − k y2
Ahora bien, teniendo en cuenta que (Fuller et al, 1996)
-93-
(72b)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
[
]
(mπ / a) (− 1) e− jkxa − 1
mπx jkx x
ψ m ( k x ) = ∫ sin
e dx =
2
a
k x2 − (mπ / a )
0
a
ψ ( k x )ψ m' ( k x ) =
*
m
[k
m
mm' π 2
2
x
] [
− (mπ / a ) a 2 k x2 − (m' π / a )
2
2
]
f mm' ( k x a )
con
[
[
2 1 − cos( k x a )
2 1 + cos( k x a )
f mm' ( k x a ) =
2 jsin( k x a )
− 2 jsin( k a )
x
]
]
si m par y m' par
si m impar y m' impar
si m impar y m' par
si m par y m' impar
resulta
ωρ0 mm' nn' π 2
8a 2b 2
∞ ∞
f mm' ( k x a ) f nn ' ( k y b)dk x dk y
ℜ ∫ ∫
2
2
2
2
−∞ −∞
k x2 − (mπ / a ) k x2 − (m' π / a ) k y2 − (nπ / b) k y2 − (n' π / b)
M mm 'nn ' =
[
][
][
][
k 2 − k x2 − k y2
]
(72c)
La eficiencia de radiación en función de las resistencias de radiación
es
σ mnm 'n ' =
M mnm 'n '
ρ0 c0 ab
(73a)
Fuller et al (1996) apuntan que en el límite de las frecuencias bajas
( k x a << mπ y k y b << nπ )
corchetes
del
se
pueden
denominador
por
sustituir
los
términos
entre
k x2 − (mπ / a ) → (mπ / a ) ,
2
2
y
análogamente para los otros términos. Asimismo, las funciones fmm’
se pueden sustituir por el primer término de su desarrollo en serie
(k xa)2
2
4 − ( k x a )
f mm' ( k x a ) ≈
2 j ( k x a)
− 2 j ( k x a )
si m par y m' par
si m impar y m' impar
si m impar y m' par
si m par y m' impar
-94-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
y una función similar se obtendría para fnn’ cambiando (kxa) por (kyb).
Por tanto, la aproximación en baja frecuencia a la eficiencia de
radiación sería
σ mm'nn '
∞ ∞ f ( k a ) f ( k b)dk dk
kab
mm '
x
nn '
y
x
y
≈
6 ℜ ∫−∞ ∫−∞
2
2
2
8mm' nn' π
k − kx − ky
(73b)
Fahy (1985) y Fuller et al (1996) demuestran que sólo los modos
para los cuales m,m’,n y n’ son impares, son eficientes en la radiación
de potencia acústica al campo lejano. La Figura 41 muestra las
eficiencias de radiación de algunos modos estructurales de órdenes
impares, en función del número de onda adimensional, ka, para una
lámina delgada simplemente soportada de b/a=0.57.
Figura 41. Eficiencias de radiación de los primeros modos estructurales impares de
una lámina delgada rectangular de b/a=0.57 (Según Elliott y Johnson, 1993)
Al igual que en el caso 1D, podemos descomponer la matriz M en
valores y vectores propios para obtener
M = P T ΩP
(74)
-95-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
donde P es una matriz real y unitaria de vectores propios y Ω es una
matriz diagonal de valores propios reales y positivos. Sustituyendo en
la Ec. (71c) para la potencia acústica radiada
N
" H P T ΩPw
" = b H Ωb = ∑ Ω n bn
Πp = w
2
(75)
n= 0
" es una serie de amplitudes modales estructurales
donde b = Pw
transformadas por los vectores propios de la matriz M. Cada uno de
los elementos de este vector es un modo radiante. Como la matriz Ω
si es diagonal, los modos radiantes actúan independientemente unos
de los otros. Como en el caso 1D, una estrategia CAAE sería actuar
sobre los primeros modos radiantes. La Figura 42 muestra los seis
primeros
modos
radiantes
de
una
placa
rectangular
delgada
simplemente soportada, excitada a una frecuencia ka=0.1, así como
sus eficiencias de radiación como una función del número de onda
adimensional ka. Como vemos en la Figura 42, el modo radiante más
eficiente de una placa delgada simplemente soportada es el primero,
que tiene una distribución de velocidad constante. Es decir, la placa
entera se mueve a una velocidad constante. Por consiguiente, un
sensor de la velocidad volúmica sería un sensor excelente para un
sistema CAAE diseñado para cancelar el primer modo radiante (el
más eficiente) de una placa.
Sabemos que la velocidad de volumen de una placa es proporcional al
producto de la velocidad superficial por el área. La velocidad
superficial se puede medir con un acelerómetro y el área se conoce.
Luego la velocidad de volumen de la fuente primaria es una cantidad
medible. Se trataría por tanto de situar una o varias fuentes
-96-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
secundarias sobre la placa que radiasen la misma velocidad de
volumen sólo que en fase contraria.
Figura 42. Distribuciones de velocidad de los seis primeros modos radiantes de una
placa rectangular delgada, simplemente soportada, excitada a una frecuencia ka=0.1
-97-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
(arriba) y las correspondientes eficiencias de radiación como una función del número
de onda adimensional ka (abajo) (Según Elliott y Johnson, 1993)
Este principio tan elemental fue aplicado por Naghshineh y Mason
(1996) usando una sóla unidad de control secundaria. La unidad de
control constaba de:
• Un aceleróemtro para medir la velocidad superficial de la placa
(PCB Piezotronics 353a16).
• Un altavoz para generar la señal secundaria (Polk Model MM3500
de 3.5 “).
• Un circuito analógico que implementaba la función de transferencia
del
controlador
(un
MCL
1304
para
el
preamplificador
del
acelerómetro, un Philips TDA1519UA para el amplificador del
altavoz, y un BB UAF42 para la función de transferencia).
En principio, se trataba de un filtro no adaptativo. Se analizó en
cámara anecoica el comportamiento de este sistema como una
función del ángulo, de la distancia vertical en la dirección del eje
acústico, y de la distancia horizontal . Se conseguían reducciones
globales de 10-13 dB en la década (50 , 100) Hz. Mediante
simulación numérica se extendía el sistema al caso de varias unidades
de
control
independientes
sobre
una
placa.
Se
analizaba
el
funcionamiento sobre una placa rectangular de (1x0.6) m2, y 6.35
mm de espesor. Existían 7 modos en la banda de interés. Se usan
hasta 6 unidades de control independientes. Se demostró que es
posible conseguir cancelaciones importantes mediante este sistema.
St. Pierre et al (1998) extendieron el trabajo anterior incluyendo un
sistema de control adaptativo. Se trataba también de unidades de
control independientes (no era multicanal). Cada unidad de control
-98-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
independiente consta de un acelerómetro para medir la velocidad de
volumen del panel, un acelerómetro para medir la velocidad de
volumen del cono del altavoz, y un altavoz para generar la velocidad
de volumen secundaria. La señal del acelerómetro en el panel era la
señal de referencia para un filtro adaptativo FX-LMS. La señal de
error era una combinación de las señales de ambos acelerómetros. El
margen de frecuencias de control de este sistema era kL≤3, siendo L
la dimensión característica de cada segmento de control. Para validar
experimentalmente el sistema se construyó una unidad de control con
cuatro segmentos, fabricada por PCB Piezotronics. Los altavoces eran
del tipo Soundtech CX2 de 240 W. El algoritmo FXLMS se implementó
en una Spectrum MDC40S, basada en un DSP TMS320C40 de TI. Los
ensayos se realizaron primero excitando el panel con un tono puro de
230 Hz. Se consiguieron reducciones de unos 22 dB en las bandas de
1/3 de octava de 200 y 250 Hz. En un segundo experimento se excitó
el panel con una señal de barrido rápido en frecuencia en la banda
(200 , 260) Hz. La reducción conseguida en este caso fue de unos 9
dB en las bandas de 1/3 de octava de 200 y 250 Hz, pero a costa de
un incremento notable en las bandas adyacentes. En definitiva, este
trabajo demostraba la viabilidad de reducir globalmente el ruido de
baja frecuencia, de origen estructural, en el interior de aviones y
helicópteros. También se podría usar en transformadores eléctricos y
en otro tipo de maquinaria pesada.
Sea Pt la presión total radiada al campo lejano por el sistema bajo
control, y Pp y Ps las contribuciones de las fuentes primaria y
secundarias, respectivamente. En condiciones de linealidad
Pt = Pp + Ps
(76a)
-99-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Dependiendo del caso considerado, la Ec. (76a) se podrá poner de la
siguiente forma:
• Excitación por una onda plana y Ns fuerzas de control puntuales
Ns
Pt = PB
+ ∑ Fjs C j
i
(76b)
j =1
• Excitación estructural localizada y Ns fuerzas de control puntuales
Ns
Pt = QB + ∑ Fjs C j
(76c)
j =1
• Excitación por una onda plana y Ns actuadores piezoeléctricos
Ns
Pt = Pi B + ∑ V js C j
(76d)
j =1
• Excitación estructural localizada y actuadores piezoeléctricos
Ns
Pt = QB + ∑ V js C j
(76e)
j =1
donde en las Ecs. (76b-e)
M N Wmn
K ∑∑ P I m I n
B = mM=1 nN=1 i
K ∑∑ Wmn I m I n
m=1 n =1 Q
para excitación por una onda plana
(77a)
para excitación estructural localizada
y
-100-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
M N Wmnj
K ∑ ∑ F Im In
m=1 n =1 j
Cj = M N W
K ∑ ∑ mnj I I
m=1 n =1 V j m n
para control por fuentes puntuales
(77b)
para control por actuadores
B representa una función de transferencia compleja entre la presión
acústica de excitación primaria y la presión acústica radiada al campo
lejano. C representa la función de transferencia compleja entre la
excitación de control y la presión acústica radiada al campo lejano.
Consideremos en primer lugar un sistema CAAE en el que los
sensores son Ne micrófonos en el campo lejano, y definamos la
función de coste
1
J=
2 ρ0 c0
Ne
∑ P (r ,θ , φ )
i
i =1
t
i
i
2
(78)
i
la cual tiende a la potencia total radiada por la placa cuando el
número de micrófonos tiende a infinito, situados todos ellos cubriendo
una semiesfera alrededor de la placa. En la práctica, el número de
sensores requeridos ha de ser igual o mayor que el número de modos
de la placa que contribuyen a la radiación acústica. Su posición
espacial ha de ser tal que se eviten las líneas nodales del diagrama de
directividad de la radiación correspondiente a cada modo radiante.
Otro detalle importante en la elección del número de sensores es que
en sistemas multicanal, ha de ser mayor o igual que el número de
actuadores. Sustituyendo la Ec. (76) apropiada para cada caso dentro
de la Ec. (78) se obtiene una forma cuadrática en función del vector
de fuerzas (o voltajes) de excitación secundarias, cuya solución
puede obtenerse siguiendo el método delineado por Nelson y Elliott
(Fuller et al, 1996). Las Ecs. anteriores permiten modelizar el
-101-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
problema del CAAE del ruido radiado por una placa delgada
simplemente soportada. Nótese la complejidad matemática del
modelo, aún en el caso acústico-estructural 2D más sencillo. El
modelo
delineado
puede
servir,
por
ejemplo,
para
comparar
predicciones teóricas con resultados experimentales (Pan et al, 1992)
o para optimizar la posición de los actuadores y sensores en un
sistema CAAE multicanal (Clark y Fuller, 1992c; Wang, 1996) .
El modelo descrito más arriba ha sido usado por Fuller et al (1996)
para predecir el efecto del control CAAE con fuerzas puntuales de
control en una placa delgada de acero, simplemente soportada, con
las características que se resumen en la Tabla 9.
Tabla 9. Características de la placa usada en el modelo
Módulo de Young, Ep (N/m2)
207 x 109
Coeficiente de Poisson, νp
0.292
Densidad, ρ (kg/m3)
7870
Espesor, tp (mm)
2
Dimensiones (a , b) (m)
(0.38 , 0.30)
Frecuencia crítica, fc (Hz)
6300
Las frecuencias naturales de esta placa, obtenidas de la Ec. (54), se
resumen en la Tabla 10. El medio acústico es el aire, con ρ0 = 1.21 kg
m-3 y c0 = 343 ms-1. Se asume primero una excitación por una onda
plana de amplitud Pi=1 Nm-2 que incide en la placa formando unos
ángulos θi=45º y φi=0º.
Tabla 10. Frecuencias naturales de la placa (Hz)
n
m
1
2
3
4
5
1
87.71
249.81
519.98
898.22
1384.53
-102-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
2
188.74
350.85
621.02
999.25
1485.56
3
357.13
519.23
789.98
1167.64
1653.95
4
592.88
754.98
1025.15
1403.39
1889.69
5
895.98
1058.08
1328.25
1706.48
2192.79
Se calcula el diagrama de radiación polar en el plano que intersecta
perpendicularmente la placa por la línea y=b/2, a una distancia r=2
m. La Figura 43 muestra los diagramas de radiación de la placa
excitada por la onda plana de 186 Hz, cuando se usan 1, 2 y 3
fuerzas puntuales de control, en las posiciones indicadas. Los dB
negativos corresponden a presiones acústicas inferiores a 20 µPa.
Figura 43. Diagramas de radiación de la placa excitada a 186 Hz, bajo condiciones de
control CAAE con 1, 2 y 3 fuerzas puntuales de control (Según Fuller et al, 1996)
Nótese que la frecuencia de excitación está próxima a la del modo
(2,1) (Tabla 10). El diagrama de radiación primario muestra una
cierta asimetría. La explicación de esta asimetría se debe a que el
-103-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
campo radiado procede fundamentalmente de los modos (1,1) , (2,1)
y (3,1).
Con una sóla fuente puntual de control en el centro de la placa se
cancela fundamentalmente el modo (1,1). El campo residual tiene
una estructura dipolar, como correspondería al modo (2,1). Una sóla
fuente puntual es incapaz de acoplarse al modo (2,1). Con dos
fuentes puntuales se controlan los modos (1,1) y (2,1), y el campo
residual correspondería al del modo (3,1), como observamos en la
Figura 43. Con tres fuentes puntuales se pueden controlar los tres
modos, lo que proporcionaría reducciones de hasta 67 dB.
Las
fuerzas
puntuales
(por
ejemplo,
las
proporcionadas
por
vibradores) dan lugar a coeficientes modales menos complejos en el
modelo, pero tienen menos interés práctico que los actuadores de
cerámica doble en contrafase. Fuller et al (1996) presentan también
resultados de su modelo usando actuadores cerámicos como fuentes
de control. La Tabla 11 resume las características del material PZT
G1195 usado en el modelo.
Tabla 11. Propiedades del material piezoeléctrico PZT G1195 usado en el modelo
(Según Fuller et al, 1996)
Módulo de Young, Epe (N/m2)
6.3 x 1010
Coeficiente de Poisson, νpe
0.30
Densidad, ρpe (kg/m3)
7650
Espesor, tpe (mm)
1.905
-166 x 10-12
d31=d32 (d36=0)(m/V)
En este caso, se considera una excitación estructural uniforme de
amplitud Q=7.9 103 Nm-2 , aplicada en una superficie de (40x40)
mm, en la esquina inferior izquierda. La Figura 44 muestra los
-104-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
diagramas de radiación cuando la placa es excitada a las frecuencias
de 85 y 128 Hz, y controlada con 1-4 actuadores cerámicos dobles en
contrafase, aplicados en las posiciones indicadas. La frecuencia de 85
Hz está próxima a la del modo (1,1) de la placa. La frecuencia de 128
Hz no coincide con la de ningún modo de la placa (vibración forzada).
-105-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 44. Diagramas de radiación de la placa excitada a las frecuencias de 85 Hz
(arriba) y 128 Hz (abajo) y controlada por 1-4 actuadores cerámicos, en las posiciones
indicadas (Según Fuller et al, 1996)
-106-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Cuando la placa es excitada estructuralmente a la frecuencia del
primer modo, el campo acústico radiado es esencialmente monopolar.
En este caso, con un sólo actuador se puede controlar el modo (1,1)
proporcionando reducciones del campo radiado de hasta 60 dB
(Figura 44, arriba). Añadir uno o dos controladores más proporciona
una atenuación adicional de 10 dB, lo cual puede que no compense la
mayor complejidad del controlador. Como veíamos en la Sección 3,
cuando la placa es excitada a una frecuencia de resonancia, la
supresión del modo correspondiente es capaz de proporcionar una
atenuación considerable del campo acústico radiado (mecanismo de
supresión modal). Sin embargo, cuando se excita la placa en
vibración forzada, contribuyen varios modos a la radiación, y es
necesario incluir varios actuadores en el controlador (Figura 44,
abajo). En este caso el mecanismo de control es el de
la
reestructuración modal (Sección 3). En lugar de reducir la amplitud
de los modos radiantes, el controlador se esfuerza en variar las fases
relativas de los modos reduciendose así la radiación global, aún
cuando la amplitud de algún modo pueda aumentar. Se puede
observar esto muy bien en el espectro espacial (en el dominio del
número de onda) de la respuesta de la placa en cada caso (Figura
45). Nótese como en el caso de vibración forzada, la amplitud de la
respuesta aumenta en la zona subsónica (no radiante) a diferencia de
lo que ocurre en la zona supersónica (zona radiante).
La Figura 45 muestra también que el efecto del CAAE es una
disminución de las componentes supersónicas del espectro espacial
de la respuesta de la placa. De hecho, una estrategia alternativa del
CAAE es formular una función de coste en el dominio (kx,ky) y tratar
de
reducir
sus
componentes
supersónicas.
Sin
embargo,
su
implementación práctica requiere el uso de sensores estructurales en
-107-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
el dominio de las frecuencias espaciales. Esta es una línea de
investigación abierta.
-108-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 45. Espectro espacial de la respuesta de la placa excitada a las frecuencias de
85 Hz (arriba) y 128 Hz (abajo) y controlada por 1-4 actuadores cerámicos, en las
posiciones indicadas (Según Fuller et al, 1996)
Al igual que en el caso 1D, se pueden usar sensores modales
distribuidos en sistemas CAAE. Clark y Fuller (1992b) compararon los
resultados del CAAE del ruido radiado por una placa usando
micrófonos y PVDF como sensores. Los sensores de PVDF consistían
en dos tiras a lo largo de la placa, una en la dirección x y otra en la
dirección y. Un sensor distribuido responde a la deformación de la
estructura con una carga eléctrica. La carga eléctrica generada por un
sensor con una función de forma definida por f(x,y) es
∂ 2w
∂ 2w
∂ 2w
q (t ) = − ∫ f ( x , y )(0.5t p + t s ) e31 2 + e32 2 + e36
dx dy
∂y
∂x∂y
∂x
S
(79)
Para una tira rectangular, como la usada por Clark y Fuller, paralela a
uno de los ejes, y limitada por ( x1e , y1e ) , las coordenadas de la esquina
inferior izquierda, y ( x2e , y2e ) , las coordenadas de la esquina superior
derecha, la función de forma es
f ( x , y ) = [H ( x − x1e ) − H ( x − x2e )][H ( y − y1e ) − H ( y − y2e )]
(80)
donde H(.) es la función escalón de Heaviside. Sustituyendo la Ec.
(80) para la función de forma, la Ec. (53) para la amplitud de
vibración, e integrando la Ec. (79) se obtiene (Fuller et al, 1996)
(
q e (t ) = e jωt t p + 0.5t s
[cos(
mπx2e
na
)∑∑ Wmn e31 ma
+ e32
nb
mb
)
M
N
m =1 n =1
/ a − cos
(
mπx1e2
)][ (
/ a cos
nπy2e
-109-
)
/ b − cos
(
nπy1e2
/b
)]
(81)
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
La Ec. (81) indica que la carga proporcionada por el sensor resulta de
la composición de todos los modos. La contribución de cada modo
depende de su amplitud modal, y de la posición del sensor
distribuido.
La disposición de los sensores distribuidos en las direcciones de los
ejes x e y se fundamenta en el hecho de que los modos que radian
eficientemente en una placa son los de orden impar. Pues bien, un
sensor distribuido a lo largo del eje x (o y) es capaz de medir los
modos impares en esa dirección. En otras palabras, en sistemas CAAE
se suelen usar sensores distribuidos 1D paralelos a las direcciones de
los ejes, más bien que sensores 2D.
La Figura 46 muestra la posición de los sensores distribuidos y
actuadores cerámicos en la placa considerada en el modelo anterior,
así como los resultados del CAAE usando sensores distribuidos y tres
micrófonos a -45º, 0º, y +45º con respecto al eje acústico del plano
perpendicular que pasa por
y=b/2. La
Tabla
12
resume
las
características del material PVDF y de la placa usados en este
experimento.
Tabla 12. Propiedades del PVDF y de la placa usados por Clark y Fuller (1992b)
Propiedad
Módulo de Young, E (N/m2)
PVDF
Placa
2 x 109
207 x 109
Coeficiente de Poisson, νp
0.292
Densidad, ρ (kg/m3)
7650
7870
Espesor, t (mm)
0.028
2
Dimensiones (a , b) (m)
(0.38 , 0.30)
Frecuencia crítica, fc (Hz)
Coeficiente
de
6300
tensión e31=65.3 x 10-3
piezoeléctrica (C/m2)
e32=38.7 x 10-3
-110-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 46. Posición de sensores y actuadores (arriba) y resultado del CAAE de la placa
excitada a 349 Hz, con 3 micrófonos a -45º, 0º, y +45º (---) y con dos sensores
distribuidos de PVDF (- - - ) (abajo) (Según Clark y Fuller, 1992b)
En todos los casos analizados por estos autores se conseguía una
atenuación mayor con los micrófonos que con los sensores de PVDF.
La gran ventaja que tienen los sensores de PVDF es que se pueden
embeber en la estructura a controlar formando sistemas inteligentes.
De los resultados de Clark y Fuller (Figura 46) ya se intuye que la
atenuación mejorará usando sensores con una forma más sofisticada
que la rectangular. Tanaka et al (1996, 1998) describen un método
-111-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
numérico para diseñar sensores distribuidos con mayor capacidad de
discriminación modal que los rectangulares. La Figura 47 muestra el
esquema de un sensor para medir el modo (1,3) de una placa
rectangular, así como la respuesta modal de la placa obtenida con un
array de acelerómetros, y con el sensor modal. Es evidente de esta
Figura que el sensor modal discrimina el modo (1,3).
Figura 47. Esquema de un sensor distribuido para medir el modo (1,3) de una placa
rectangular (arriba), respuesta modal de la placa (abajo izquierda) y respuesta del
sensor modal (abajo derecha) (Según Tanaka et al, 1998)
Como hemos visto antes, el primer modo radiante, y el más eficiente,
de una placa es un modo volumétrico. Johnson et al (1993) aplicaron
-112-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
este
procedimiento
de
diseño
de
sensores
distribuidos
para
desarrollar un sensor capaz de medir la velocidad de volumen de una
placa. Estos autores encontraron que un sensor con una función de
forma cuadrática en una de las direcciones de la placa (Figura 48)
f ( x, y ) =
(
4 f0
Lx x − x 2
Lx
)
(82)
suministra una salida proporcional al desplazamiento promediado de
la placa en su modo de flexión. La velocidad será la derivada de la
salida de este sensor (multiplicación por jω).
Figura 48. Representación de la Ec. (82)
La Figura 49 muestra dos posibles realizaciones de este sensor con
función de forma cuadrática.
Charette
et
al
(1998)
discutían
un
método,
basado
en
la
representación modal de la respuesta de la placa, para el diseño de
un sensor distribuido para medir el desplazamiento de volumen. La
Figura 50 muestra la forma de los sensores resultantes en las
direcciones de los ejes x e y, y los resultados del CAAE de una placa
encastrada (no en soporte libre) excitada a la frecuencia del modo
(1,1) (140 Hz), usando este par de sensores distribuidos.
-113-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Figura 49. Dos realizaciones de un sensor distribuido para el modo volumétrico (Según
Johnson et al, 1993)
Al igual que en los casos anteriores, el sensor está compuesto de
varias tiras de PVDF, alineadas con los ejes de la placa, con una
forma que se obtiene a partir de las funciones propias
medidas
experimentalmente. El método, por tanto, es válido para cualesquiera
condiciones de contorno. Se consideraba una placa de acero de (50 x
39.8 x 0.315) cm. Como fuentes primaria y secundaria se usaban
actuadores cerámicos PZT de (38.1 x 38.1 x 0.19) mm. Los sensores
distribuidos se construyeron a partir de PVDF de 28 µm de espesor.
Como podemos observar, se obtenían atenuaciones promedio del
-114-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
orden de 40 dB en todo el sector angular para este modo de
resonancia.
Figura 50. Sensores distribuidos para medir el desplazamiento de volumen de una
placa encastrada (arriba) y resultados del CAAE correspondiente cuando la placa es
excitada a la frecuencia de su modo (1,1) (140 Hz) (abajo) (Según Charette et al, 1998)
Para
excitaciones
a
otras
frecuencias,
los
autores
obtenían
atenuaciones promedio de 16 dB (a 125 Hz, vibración forzada) y de
14 dB (320 Hz, modo (1,2)). El controlador consistía en un sistema
anticipativo que implementaba el algoritmo FX-LMS.
-115-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
6. RESUMEN Y CONCLUSIONES
Funcionamiento
CAAE
Límite impuesto por
la parte acústico estructural
Límite impuesto por
el sistema de control
Figura 51. Funcionamiento de un sistema CAAE
•
El éxito del sistema CAAE depende críticamente de la interrelación
entre las partes acústico-estructural y electrónica (Figura 51).
•
La atenuación máxima alcanzable la determina la parte acústicaestructural (calidad de la señal de referencia, prestaciones y
posición de los sensores y actuadores, ..)
• El grado de aproximación a la máxima atenuación la determina el
controlador (potencia y velocidad del DSP, algoritmo de control, ..)
•
Las cerámicas PZT tienen mayor aplicación como actuadores,
proporcionando una deformación mayor (d31) para el mismo
campo eléctrico aplicado. Soportan una campo eléctrico mayor,
una temperatura más alta, y tienen un factor de acoplamiento
electromecánico mayor.
-116-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
•
El PVDF, sin embargo, se suele usar como sensor, pues
proporciona un campo eléctrico mayor para la misma tensión (g31).
Además son flexibles, por lo que se pueden pegar sobre
prácticamente cualquier superficie.
•
Los materiales piezoeléctricos son los más baratos y los más
disponibles en el mercado.
•
Las AMF son los que proporcionan mayor deformación, pero sufren
más que los demas de histéresis.
•
Los
materiales
magnetoestrictivos
ofrecen
deformaciones
comparables a los piezoeléctricos, pero su histéresis es menor.
El planteamiento usual para resolver un problema CAAE es:
1) PROBLEMA ESTRUCTURAL: Conocer w(rs , t ) o w" (rs ,t)
2) ACOPLAMIENTO ACUSTICO-ESTRUCTURAL: Calcular P(r ,θ , φ )
Método de la integral de Rayleigh (requiere un baffle infinito)
P(r, ω ) =
− jk r − rs
jωρ 0
e
"
w
dS
r − rs
2π ∫S
3) FUNCION DE COSTE: Como los algoritmos de control (FX-LMS,
FU-LMS,..) se basan en el método de los mínimos cuadrados, hay
-117-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
que definir una función cuadrática de las señales captadas por los
sensores de error. Por ejemplo, la potencia total radiada.
1
r2
2
Πp =
pt dS =
2 ρ 0 c ∫S
2ρ 0c
2π π / 2
∫∫p
0
2
t
sinθdθdΦ
0
3.1. Formulación espectral (transformada de Fourier al dominio
espectral espacial)
2
V (k x )
ωρ 0
dk
Πp =
ℜ
x
8π 2 k ≥∫k x k 2 − k x2
3.2. Formulación matricial (descomposición en valores singulares
de la matriz resistencia de radiación)
3.2.1. Modos estructurales
Π p = v H Rv
combinado con v = Φa , da lugar a
Π p = a H Ma
donde M = Φ H RΦ
3.2.2. Modos radiantes
Π p = v H Rv
-118-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
combinado con R = Q H ΛQ , da lugar a
d
Π p = y H Λy = ∑ λ i y i
2
i =1
donde y = Qv .
Nótese que:
•
Tanto la matriz M como la R son matrices cuyos elementos fuera
de la diagonal son distintos de cero.
•
Esto quiere decir que a la potencia radiada a una determinada
frecuencia (por ejemplo, a una frecuencia propia de la estructura)
contribuyen todos los modos.
• Desde el punto de vista del CAAE, esto significa que la reducción
de un modo estructural no implica necesariamente la
reducción de la potencia acústica radiada a la frecuencia de
ese modo.
•
A diferencia de los modos estructurales, la reducción de un
modo radiante garantiza la reducción de la potencia total
radiada a esa frecuencia.
En cuanto a los sensores para el CAAE puede concluirse lo siguiente:
•
Los sensores para el CAAE pueden ser acústicos (micrófonos) o
estructurales (acelerómetros, PVDF).
•
Los micrófonos miden directamente la potencia radiada por lo que
proporcionan unas prestaciones CAAE mayores que los sensores
estructurales.
-119-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
•
Sin
embargo,
la
tendencia
actual
es
diseñar
estructuras
inteligentes, donde tanto los actuadores como los sensores estén
integrados en la estructura (aplicaciones aeroespaciales).
• Los
sensores
estructurales
pueden
ser
arrays
puntuales
(acelerómetros) o distribuidos.
∞
w( x) = ∑ Wnψ n ( x) = ΨW ,
n =1
W = Ψ −1 w
[
W = ΨT Ψ
]
−1
ΨT w
si la matriz
Ψ es cuadrada
si la matriz
Ψ no es cuadrada
La carga eléctrica de salida, q(t), de un sensor distribuido está dada
por
∞
q(t ) = ∑ Wn Bn
n =1
LS
Bn = −(hb + hs )e31 ∫ f ( x)
0
∂ 2ψ n
dx
∂x 2
Para el caso 1D, ψ n ( x ) ∝ sin(k n x) ) , y ∂ ψ n / ∂x ∝ sin(kn x) ) . Luego,
2
2
debido a la ortogonalidad de los modos normales, un sensor
distribuido para medir el modo m-ésimo deberá tener una f(x)
proporcional a ese modo.
-120-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
REFERENCIAS
Brennan, M.J., Elliott, S.J., and Pinnington, R.J., 1997. “The dynamic
coupling between piezoceramic actuators and a beam”. J.
Acoust. Soc. Am., 104(4), 1931-1942.
Charette, F., Berry, A., and Guigou, C., 1998. “Active control of sound
radiation from a playe using a polyvinylidene fluoride volume
displacement sensor”. J. Acoust. Soc. Am., 103(3), 1493-1503.
Clark, R.L., Fuller, C.R., and Wicks, A., 1991. “Characterization of
multiple piezoelectric actuators for structural excitation”. J.
Acoust. Soc. Am., 90(1), 346-357.
Clark, R.L. and Fuller, C.R., 1992a. “Experiments on active control of
structurally
radiated
sound
using
multiple
piezoceramic
elements”. J. Acoust. Soc. Am., 91(6), 3313-3320.
Clark, R.L. and Fuller, C.R., 1992b. “Modal sensing of efficient
acoustic
radiators
with
polyvinylidene
fluoride
distributed
sensors in active structural acoustic control approaches”. J.
Acoust. Soc. Am., 91(6), 3321-3329.
Clark,
R.L.
and
Fuller,
C.R.,
1992c.
“Optimal
placement
of
piezoelectric actuators and polyvinylidene fluoride error sensors
in activel structural acoustic control approaches”. J. Acoust.
Soc. Am., 92(3), 1521-1533.
Clark, R.L. and Fuller, C.R., 1992d. “A model reference approach for
implementing active structural acoustic control”. J. Acoust. Soc.
Am., 92(3), 1534-1544.
Clark, R.L. Pan, J., and Hansen, C.H., 1992. “An experimental study
of the active control of multiple-wave types in an elastic beam”.
J. Acoust. Soc. Am., 92(1), 871-876.
Cobo,
P.,
1997.
Control
Activo
del
Ruido.
Principios
y
Aplicaciones. CSIC, Colección Textos Universitarios, Nº 26,
Madrid.
-121-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Cunefare, K.A., 1991. “The minimum multimodal radiation efficiency
of baffled finite beams”. J. Acoust. Soc. Am., 90(5), 2521-2529.
Elliott, S.J. and Johnson, M.E., 1993. “Radiation modes and the active
control of sound power”. J. Acoust. Soc. Am., 94(4), 21942204.
ESTEC Working Paper Nº 1816, 1995. “Vibration isolation and
damping of pointing payloads”, ESA, Noorwidj.
Fahy, F.J., 1987. Sound and Structural Vibration. Academic Press,
London.
Ferroperm,
1996.
Piezoceramics.
Ferroperm
Ltd.,
Kvistgard,
Denmark.
Fuller, C.R., Hansen, C.H., and Snyder, S.D., 1991. “Active control of
sound radiation from a vibrating rectangular panel by sound
sources and vibrational inputs: an experimental comparison”. J.
Sound. Vib., 145(2), 195-215.
Fuller, C.R., Bronzel, M.J., Gentry, C.A., and Wittington, D.E., 1994.
“Control of sound radiation/reflection with adaptive foams”.
NOISE-CON 94, 429-436.
Fuller, C.R., Elliott, S.J., and Nelson, P.A., 1996. Active Control of
Vibration. Academic Press, London.
Gentry, C.A., Guigou, C., and Fuller, C.R., 1997. “Smart foam for
applications in passive-active noise radiation control”. J. Acoust.
Soc. Am., 101(4), 1771-1778.
Gibbs, G.P and Fuller, C.R., 1992. “Excitation of thin beams using
asymetric piezoelectric actuators”. J. Acoust. Soc. Am., 92 (6),
3221-3227.
Gulden, T.D., Harder, C.R., Trester, P.W., Keith, W., and Austin, S.,
1995.
“Electro-active
hydroacoustic
elastomeric
applications”.
structure
ACTIVE-95
(EAES)
for
(Sommerfeldt
and
Hamada, Eds), Noise Control Foundation, New York, 13111318.
-122-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
Hansen, C.H. and Snyder, S.D., 1991. “Mechanisms of active noise
control by vibrating sources”. J. Sound Vib., 147(3), 519-525.
Hansen, C.H. and Snyder, S.D., 1997. Active Control of Noise and
Vibration. E&FN Spon, London.
IEEE, 1988. IEEE Standard on Piezoelectricity. IEEE Inc., New
York
Johnson, M.E., Elliott, S.J., and Rex, J.A., 1993. “Volume velocity
sensors for active control of acoustic radiation”. Technical
Memorandum, ISVR, University of Southampton.
Johnson, M.E. and Elliott, S.J., 1995. “Active control of sound
radiation using volume velocity cancellation”. J. Acoust. Soc.
Am., 98(4), 2174-2186.
Lafleur, L.D., Shields, F.D., and Hendrix, J.E., 1991. “Acustically
active surfaces using piezorubber”. J. Acoust. Soc. Am., 90(3),
1230-1237.
Li, Z., Guigou, C., Fuller, C.R., and Burdisso, R.A., 1997. “Design of
active structural acoustic control systems using a nonvolumetric
eigenproperty asignment approach”. J. Acoust. Soc. Am.,
101(4), 2088-2096.
Naghshineh, K. and Mason, V.B., 1996. “Reduction of sound radiated
from vibrating structures via active control of local volume
velocity”. Applied Acoustics, 47, 27-46.
Pan, J., Snyder, S.D., Hansen, C.H., and Fuller, C.R., 1992. “Active
control of far-field sound radiated by a rectangular panel - A
general analysis”. J. Acoust. Soc. Am., 91(4), 2056-2066.
Rogers, C.A., 1990. “Active vibration and structural acoustic control of
shape memory alloy hybrid composites: Experimental results”.
J. Acoust. Soc. Am., 88(6), 2803-2811.
Scott, B.L. and Sommerfeldt, S.D., 1997. “Estimating acoustic
radiation
from
a
Bernouilli
-123-
-Euler
beam
using
shaped
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
polyvinylidene fluoride film”. J. Acoust. Soc. Am., 101(6), 34753485.
St. Pierre, R.L., Koopmann, G.H., and Chen, W., 1998. “Volume
velocity control of sound transmission through composite
panels”. Applied Acoustics, 210(4), 441-460.
Stansfield, D., 1990. Underwater Electroacoustic Trasnducers.
Bath University Press, Claverton Down.
Tanaka, N.,
Snyder, S.D., and Hansen, C.H., 1996. “Distributed
parameter modal filtering using smart sensors”. J. Vib. Acoust.
118, 630-640.
Tanaka, N., Kikushima, Y., and Fergusson, N.J., 1998. “Onedimensional distributed modal sensors and the active modal
control for planar structures”. J. Acoust. Soc. Am., 104(1), 217225.
Wallace, C.E., 1970. “Radiation resistance of a rectangular panel”. J.
Acoust. Soc. Am., 51(3), 946-952.
Wang,
B.T.,
1996.
“Optimal
placement
of
microphones
and
piezoelectric transducer actuators for far-field sound radiation
control”. J. Acoust. Soc. Am., 99(5), 2975-2984.
Wicker, K., Eberius, C., and Guicking, D., 1997. “Electrorheological
fluids as an electrically controllable medium and possible
applications tp underwater
sound absorbers”.
ACTIVE
97
(Horváth and Elliott, Eds.), OPAFKI, Budapest, 733-744.
AGRADECIMIENTOS
Este trabajo ha sido posible gracias a la financiación de la CICYT, a
través del Proyecto AMB99-1095-C02-01
-124-
P. Cobo
Control Activo Acústico Estructural
_____________________________________________________________
-125-