Problemas de los Temas 2 y 3
Anuncio

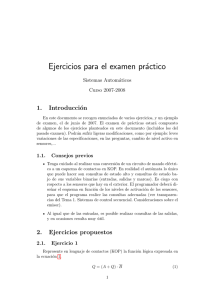
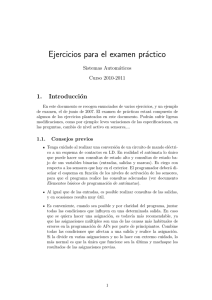
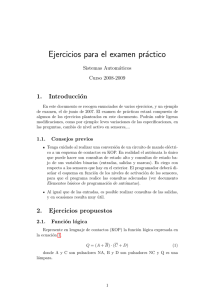
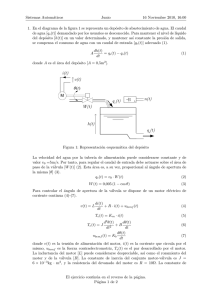
Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 1 Problemas de los Temas 2 y 3 Problema 3.1 Considérese el circuito de la figura formado por una resistencia y un condensador conectados en serie. La variable de entrada es el voltaje aplicado ve , la variable de salida es el voltaje en los extremos del condensador vs . Se pide: + R 0110 Ve i - 0110 111 000 000 111 0110 10 10 C 1010 11111111 00000000 1010 10 1010 1010 01 + Vs 01 - a) Obtener un modelo apropiado del sistema considerando que los componentes son ideales y de valor R Ohmios y C Faradios. b) Obtener la función de transferencia del circuito G(s) = Vs (s) Ve (s) . c) Si vs = ve = 0 para t < 0 y el voltaje de entrada sufre una subida en escalón de amplitud 2 voltios en el instante t = 0, obtener Vs (s). d) Utilizando la antitransformada de Laplace hallar vs (t). e) Comprobar qué sucede si en lugar de aplicar ve (t) = 2u(t) se hubiese aplicado la entrada ve (t) = u(t). f) Calcular vs (t) en el caso en que se conecta una fuente que sigue una rampa de pendiente 2V /s. Calcule el error de arrastre. Problema 3.2 Para un sistema mecánico formado por una masa unida a una pared mediante un muelle sobre la que se aplica una horizontal F se pide: k m F x a) Obtener las ecuaciones dinámicas que describen el comportamiento del sistema en función de la masa m, la constante del muelle k y la fuerza F . 2 Depto. Ing. de Sistemas y Automática. ESI. US. b) Calcular la función de transferencia del sistema siendo la entrada la fuerza aplicada y la salida el desplazamiento de la masa. c) Calcular la trayectoria de salida si la fuerza que se aplica es un impulso. d) Realizar los apartados anteriores si adicionalmente existe una fricción, que se puede modelar como una fuerza que se opone al movimiento de forma proporcional a la velocidad con una constante f. Problema 3.3 Considere el sistema mecánico traslacional formado por dos masas mostrado en la figura. k2 B B m2 y2 k1 m1 F y1 La entrada es la fuerza u(t) aplicada a la masa 1. La salida es y1 (t), el desplazamiento de dicha masa respecto a su posición de equlibrio en ausencia de fuerza u = 0. Las ecuaciones que modelan dicho sistema son F = m1 ÿ1 + K1 (y1 − y2 ) K1 (y1 − y2 ) = m2 ÿ2 + 2B ẏ2 + K2 y2 Se pide: a) Describir el sistema en forma de diagrama de bloques de tipo integradores y ganancias. En este diagrama deben aparecer las señales y1 e y2 . (s) (s) b) Funciones de transferencia YF2(s) y YF1(s) obtenidas a partir de las ecuaciones diferenciales y también a partir del diagrama de b) mediante las transformaciones del álgebra de bloques. c) Trayectoria de la salida y1 (t) cuando la entrada es un escalón unitario partiendo de condiciones iniciales nulas. El valor de los parámetros es K1 = 2, K2 = 2, B = 1, m1 = 2 y m2 = 1. Fundamentos de Control Automático, 2o 3 Grd. Ing. Tecn. Industrial. Problema 3.4 Se trata de modelar un depósito cónico como el que se muestra en la figura. El caudal de agua entrante es Qe (m3 /s), el caudal de agua evacuado por gravedad es Qs (m3 /s). La altura del nivel de agua sobre la abertura es H (m) y es la salida del sistema. El ángulo que forma una generatriz del cono con el eje es α conocido. Qe r α H H Qs Las ecuaciones que modelan el sistema son: V π tan2 α 3 H 3 √ = B H = Qs dV = Qe − Qs dt Se pide: a) Obtener la descripción externa del sistema en ecuaciones diferenciales. b) Como el modelo resultante es no lineal, se propone linealizarlo en torno a Qe = 1 (m3 /s). c) Usando el modelo linealizado del punto anterior describir qué ocurre cuando Qe se incrementa bruscamente en un 10 %. d) Dibujar un diagrama de bloques del modelo linealizado en el que intervengan (al menos) las señales qe , qs y h (variaciones con respecto al punto de funcionamiento). Problema 3.5 Un sistema dinámico se excita con una señal u(t) = 1 − e−t 4 Depto. Ing. de Sistemas y Automática. ESI. US. y responde de forma que y(t) = e−2t (2/5cos(t) − 1/5sen(t)) − e−t + 3/5. Se pide: a) Determinar la función de transferencia del sistema dinámico. b) Deducir la ecuación diferencial que lo representa c) Determinar una posible descripción interna del mismo. d) Calcular la respuesta impulsional del sistema e) Calcular la respuesta del sistema cuando se excita con u(t) = 2sen(3t) Problema 3.6 El diagrama de bloques que se muestra a continuación representa el ángulo θ(t) girado por una carga accionada por un motor de corriente continua alimentada por una tensión Va (t). θ Va B Va Ia 1 La s + Ra + - Cp P J 1 Js+B sΘ 1 s Θ Vce Kce Se pide a) Calcular la función de transferencia del sistema b) Calcular la función de transferencia tomando como salida el par del motor c) Asuma que el motor experimenta un efecto de frenado debido a un elemento externo. Se sabe que este elemento ejerce un par de frenado Tf . Redibuje el diagrama de bloques anterior de forma que tenga en cuenta esta nueva entrada d) Calcule la función de transferencia del diagrama de bloques anterior. Fundamentos de Control Automático, 2o 5 Grd. Ing. Tecn. Industrial. Problema 3.7 Dado el diagrama de bloques de la figura, + + SSISTEMA LINEAL en el que el sistema lineal viene dado por la función de transferencia K , τs + 1 hallar la expresión matemática de y(t) sabiendo que u(t) es un escalón unitario en los siguientes experimentos: G(s) = a) Se cierra I1 en t = 0s mientras que I2 permanece abierto. b) Se cierra I2 en t = 0s mientras que I1 permanece abierto. c) Se cierra I2 en t = 0s e I1 en t = 4s. d) Se cierra I1 en t = 0s e I2 en t = 2s. Nota: en todos los casos se parte de condiciones en t = 0s nulas. Problema 3.8 El sistema de la figura consiste en un motor de corriente continua alimentado con una tensión V que acciona una bomba que está conectada a su eje. Esta bomba impulsa un caudal qc de lı́quido combustible de alimentación de una caldera. Ésta aporta una potencia calorı́fica Q̇ a un horno en el que se calienta una sustancia. El horno no está aislado térmicamente, por lo que cede calor al ambiente, que se encuentra a una temperatura constante T ext = 25o C. Text combustible Th ω V Bomba Motor caldera qc 6 Depto. Ing. de Sistemas y Automática. ESI. US. La bomba se modela mediante una momento de inercia J y una constante de fricción B. Además el caudal de lı́quido impulsado por ésta es proporcional a la velocidad con la que se acciona, de forma que qc = Kq · w. El calor cedido por la caldera es proporcional al caudal, de forma que Q̇ = Cq · qc, siendo Cq el poder calorı́fico del combustible. El horno tiene una capacidad calorı́fica Kh y una constante de pérdidas de calor cedido al ambiente Kper. El sistema viene descrito por las siguientes ecuaciones: • Motor de corriente continua: V (t) = Ra ·ia (t) + La · dia (t) + Kcem ·ω(t) dt T (t) = Kp ·ia (t) siendo ia (t) la intensidad por la armadura del motor, ω(t) la velocidad angular del eje del motor y T (t) el par ejercido por el eje del motor. • Bomba de caudal: T (t) = B·ω + J· dω dt qc (t) = Kq ·ω siendo qc (t) el caudal de combustible impulsado por la bomba. • Caldera: Q̇(t) = Cq ·qc (t) siendo Q̇(t) la potencia calorı́fica aportada por la caldera. • Horno: Kh · dTh (t) dt = Q̇(t) − Kper ·(Th (t) − Text ) siendo Th (t) la temperatura del horno. El sistema a analizar tiene como entrada la tensión de alimentación del motor V y como salida la diferencia entre la temperatura del horno y la temperatura del ambiente, θ = T h − T ext. Se pide: a) Dibujar un diagrama de bloques del modelo, indicando los elementos (motor, bomba, horno) que lo forman en función de los parámetros. b) Función de transferencia del sistema, en función de los parámetros. Fundamentos de Control Automático, 2o 7 Grd. Ing. Tecn. Industrial. Parámetro Inductancia del motor de CC Resistencia del motor de CC Cte. contraelectromotriz Cte. de par Momento de inercia de la bomba Cte. de fricción de la bomba Cte. de impulsión de la bomba Poder calorı́fico del combustible Capacidad calorı́fica del horno Cte. de pérdidas con el ambiente Nombre La Ra Kcem Kp J B Kq Cq Kh Kper Valor 0.001 1 1 1 2 1 0.02 5000 50 5 Unidades H Ω V s/rad N m/A kgm2 N ms/rad m3 /rad W s/m3 J/o C W/o C c) Calcular la temperatura que alcanza el horno cuando se aplica una tensión constante al motor V = 10 voltios. d) Calcular la respuesta del sistema si V (t) = ( 10 t < 10 12 t ≥ 10 Problema 3.9 Dado el diagrama de bloques de un sistema lineal con dos entradas r(s) y p(s), y una salida y(s) que se muestra en la figura adjunta, utilizar el álgebra de bloques para determinar: a) La función de transferencia entre la salida y(s) y la entrada r(s). b) La función de transferencia entre la salida y(s) y la entrada p(s). - r(s) + A(s) + B(s) y(s) + C(s) + - p(s) D(s) Problema 3.10 En la figura (a) se tiene el diagrama de bloques de un sistema dinámico lineal. Llamemos F (s) = Y (s)/U (s) a la función de transferencia del mismo. Las constantes A y k son mayores que cero. Se plantean las siguientes cuestiones: 8 Depto. Ing. de Sistemas y Automática. ESI. US. a) Si u(t) tiene la forma indicada en la figura (b), ¿cuál es la expresión de y(t)? b) Si u(t) = 0 para t < 0 y u(t) = 0.01t2 para t ≥ 0, ¿cuál es la expresión de y(t)? (a) (b) Problema 3.11 Un cilindro metálico de masa mc tiene una temperatura Tc o C. El aire que le rodea está a una temperatura menor Ta . Se conoce la masa, el calor especı́fico y la constante de convección: mc = 30 kg, Ce = 2 J/(kg o C), Kconv = 0.1 W/o C. Dentro del cilindro ocurre una reacción quı́mica exotérmica que produce un calor u (W). Las ecuaciones que modelan este sistema son d(mc Ce Tc ) = Q̇aportado − Q̇cedido dt Q̇aportado = u Q̇cedido = Kconv (Tc − Ta ) Suponga que la variable de entrada es u y la de salida es y = Tc − Ta . En el instante t = 0 la temperatura del cilindro es Tc = 20 o C. El ambiente permanece a temperatura constante Ta = 20 o C. El calor generado por la reacción del interior del cilindro es un escalón unitario. Se pide: a) Indique la expresión y(t). b) Al cabo de 900 segundos la reacción cesa bruscamente. Indique la expresión y(t) para t > 900. c) Suponga ahora que no se produce ninguna reacción y que inicialmente Tc = 60 o C mientras que el ambiente permanece a temperatura constante Ta = 20 o C. Indique la expresión y(t). Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 9 Problema 3.12 Obtener la expresión y(t) de la salida del modelo cuya función de transferencia es H(s) = (s + 1) (s + 5)(s + 10) suponiendo que la entrada u(t) es: a) Un escalón en t=0s de amplitud unidad. b) Un escalón de amplitud 2 en t=3s. c) Una rampa unitaria en t=0s. d) Un impulso unitario en t=-2s. Problema 3.13 Se puede modelar una estufa de infrarrojos como un elemento de masa M y calor especı́fico Ce que se calienta mediante una corriente eléctrica y disipa calor por radiación al medio ambiente. La potencia calorı́fica producida por la corriente eléctrica viene dada por Qe = V 2 /R y la emitida al ambiente por la estufa es Qr = K(T 4 − Ta 4 ), donde V es la tensión eléctrica, R la resistencia eléctrica, K una constante, T la temperatura de la estufa y Ta la temperatura ambiente, que se considera constante y conocida. Considerando V como la entrada y T como la salida del sistema y despreciando la transferencia de calor por conducción y convección: a) Obtenga el modelo matemático del sistema. Recuérdese que M Ce dT = Q̇aportado − Q̇cedido dt b) Calcule el valor de la temperatura T en el punto de funcionamiento, en el que la entrada vale Vpf . c) Obtenga el modelo lineal en torno al punto de funcionamiento y la función de transferencia utilizando los cambios de variable: λ = (V − Vpf ), θ = (T − Tpf ). Problema 3.14 En la figura adjunta se muestra un coche representado por un cuerpo de masa M c y el sistema de suspensión de éste, formado por un resorte de constante K y un amortiguador de constante B. El automóvil lleva adherido un cuerpo auxiliar de masa M a mediante un resorte de constante Ka. La acción de la variación de la altura del suelo a lo largo del 10 Depto. Ing. de Sistemas y Automática. ESI. US. tiempo x(t), induce un desplazamiento vertical en el coche xc(t) y en el cuerpo auxiliar xa(t). Estos desplazamientos, indicados en la figura, tienen como origen una posición de equilibrio del sistema. xc(t) Mc K a K Ma B xa(t) x(t) Las ecuaciones que modelan el sistema son: M c·x¨c + K·(xc − x) + B·(x˙c − ẋ) + Ka ·(xc − xa ) = 0 M a·x¨a − Ka ·(xc − xa ) = 0 Calcular la función de transferencia, tomando como señal de salida la posición del coche xc(t) y como señal de entrada el desplazamiento del suelo x(t). Problema 3.15 El circuito de la figura (a) es un sistema dinámico lineal de parámetros concentrados con entrada u(t) y salida y(t) que puede describirse por medio del diagrama de bloques de la figura (b). Indique la función de transferencia G(s) = Y (s)/U (s) (en función de los parámetros del circuito) y los bloques A(s) y B(s). (a) (b) Fundamentos de Control Automático, 2o 11 Grd. Ing. Tecn. Industrial. Problema 3.16 a0 z(t) a1 a2 0 Un depósito prismático tiene una base de S m2 y una altura de a0 m. El depósito está abierto en su parte superior, por donde se ha llenado, y se vacı́a por gravedad a través de dos agujeros iguales practicados en la pared a distintas alturas (a1 y a2 ), como muestra la figura. a) Si inicialmente el depósito está lleno de agua y no se añade más, ¿cuál es la ecuación diferencial que modela el comportamiento de z(t) antes de que el nivel baje hasta a1 ? b) Indique, en función de los parámetros, cuánta agua habrı́a que aportar por segundo para que el nivel se mantuviese en z0 = (a0 + a1 )/2. c) Linealice el modelo hallado en el apartado a) en torno a z0 = (a0 + a1 )/2. d) Indique, en función de los parámetros, cuánta agua habrı́a que aportar por segundo para que el nivel se mantuviese en z1 = (a1 + a2 )/2. Problema 3.17 Sea un sistema formado por dos depósitos prismáticos de secciones A1 y A2 dispuestos verticalmente. El depósito superior (depósito 1) está alimentado por un caudal de agua Q(t) y desagua por gravedad, con un caudal de salida Qs1 , en el otro depósito (depósito 2). Este también se desagua por gravedad con un caudal de salida Qs2 . La constante de fricción de la tuberı́a de descarga del depósito 1 es K1 y del depósito 2 es K2 . Q(t) Se pide: a) Las ecuaciones que modelan el sistema, indicando unas variables de estado del mismo. 00 11 00 11 00 11 111111 000000 111 00 000 11 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 H1(t) 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 00000000 111111 11 000000 111111 Qs1(t) b) La expresión del punto de equilibrio del sistema (H1o ,H2o ,Qos1 y Qos2 ) en función de Qo . c) La función de transferencia del sistema linealizado en torno al punto de funcionamiento considerando como señal de salida H2 (t) y como señal de entrada Q(t). (Utilice como variables incrementales q = Q−Qo , h1 = H1 −H1o , h2 = H2 −H2o , q1 = Qs1 − Qos1 y q2 = Qs2 − Qos2 ). 11 00 00 11 00 11 00 11 00 11 000000 111111 00 11 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 Qs2(t) 1 0 0 1 0 1 0 1 0 1 H2(t) 12 Depto. Ing. de Sistemas y Automática. ESI. US. Problema 3.18 Una piscina de paredes verticales y de 18 m2 de sección dispone de una válvula de desagüe de tipo esférica de cuarto de vuelta, como se muestra en la figura. El fabricante de la válvula facilita la relación no lineal entre la constante de fricción Kp de la misma y el ángulo de apertura θ, siendo Kp = 10−6 · θ2 (observe la gráfica). Qe h(t) qs(t) Kp (m7/2/kg1/2) Densidad del agua 1000 Kg/m3 Aceleración de la gravedad 9.8 m/s2 q=Kp (p1-p2)1/2 Abierta 90º 2 1 0º Cerrada ángulo de apertura 0.009 0.008 0.007 0.006 0.005 0.004 0.003 0.002 0.001 0 0 K =10−6 θ2 p 10 20 30 40 50 60 70 80 90 θ (grados) La piscina está constantemente alimentada por un caudal Qe = 10 · 10−3 m3 /s. Suponga que la válvula está abierta 12 grados y se ha llegado a las condiciones estacionarias. Se pide: a) Calcule la altura alcanzada por el agua en las condiciones estacionarias b) Conseguidas las condiciones estacionarias, a las 13:00 horas se incrementa el ángulo de apertura 0.1 grados. Haga los cálculos necesarios y dibuje la evolución del nivel de agua desde las 13:00 hasta las 19:00 horas.(la válvula no se ha manipulado en este periodo). c) Una vez estabilizado el nivel a las 19:00 h. se posiciona la apertura de la válvula en 8 grados, evolucionando en las horas posteriores hasta una nueva situación estacionaria. Calcule el nivel alcanzado por el agua en esta nueva situación. d) Conseguidas las condiciones estacionarias, a las 13:00 horas del dı́a siguiente se incrementa el ángulo de apertura 0.1 grados. Haga los cálculos necesarios y dibuje la evolución del nivel de agua desde las 13:00 horas.(la válvula no se ha manipulado en este periodo). Nota: dado que el sistema es no lineal, la evolución del nivel se calculará de forma aproximada a partir del modelo linealizado en torno a punto de equilibrio apropiado Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 13 Problema 3.19 La figura adjunta muestra la parte mecánica de una máquina de mezcla de pinturas. La máquina recibe en el eje1 un par T (t) de un motor externo responsable del movimiento del conjunto eje1-engranaje-eje2-agitador. T(t) par motor rueda dentada con N2 dientes eje2 01 : ángulo girado por eje1 rueda dentada con N1 dientes cojinetes2 eje1 cojinetes1 ángulo girado por eje2 : 02 agitador Se tienen los siguientes parámetros: • el eje1 junto con su rueda dentada tiene un momento de inercia J1 • el eje2 junto con su rueda dentada y el agitador presenta un momento de inercia J2 • los coeficientes de fricción viscosa que presentan los cojinetes de cada eje son B1 y B2 respectivamente • el coeficiente de fricción viscosa que presenta el agitador con el lı́quido de mezcla es Bagitador Tenga en cuenta que utilizamos una reductora y por lo tanto ha de cumplirse que trabajo el trabajo realizado por un engranaje ha de ser el mismo que el desarrollado por el otro (suponiendo que no hay fricción) y que el la distancia sobre la superficie que viaja cada engranaje es la misma, por lo tanto: T1 θ 1 = T1 θ 1 θ 1 r1 = θ 2 r2 de aquı́ se deduce que: T1 r1 ω2 θ2 = = = T2 r2 ω1 θ1 Donde T es el par, ω es velocidad angular, θ es ángulo girado y r es el radio del engranaje. 14 Depto. Ing. de Sistemas y Automática. ESI. US. 2 Por otro lado el par motor se emplea en vencer la inercia J ddt2θ , vencer la fricción B dθ dt y proporcionar el par útil Tu . T =J d2 θ dθ +B + Tu dt2 dt Se pide: a) Modelo de ecuaciones diferenciales del sistema considerando como entrada al mismo 2 el par motor T (t) y como salida la velocidad angular del eje2, dθ dt . b) Función de transferencia. c) Conocidos los valores de los parámetros, ası́ como los datos del conjunto cuando trabaja en régimen permanente: • J1 = 0.1kg · m2 y J2 = 0.2kg · m2 • N1 = 10 y N2 = 100 ·m·s ·m·s ·m·s , B2 = 2 Nrad y Bagitador = 10 Nrad • B1 = 1 Nrad • Potencia del motor 2232.14 W • Par motor T (t) aplicado 50N · m Indique el valor numérico de la velocidad angular del eje2 en régimen permanente. d) Si la velocidad angular del eje2 es insuficiente para hacer una mezcla eficiente y se desea aumentar esta velocidad hasta multiplicarla por 10, indique los valores numéricos del par motor T y potencia del motor necesarios para conseguirlo en los siguientes casos: • d1) en el caso de mantener la configuración actual del engranaje. • d2) en el caso de eliminar el engranaje y dejar sólo el eje2 pero cambiando todos los cojinetes a este eje, tal y como muestra la figura adjunta. T(t) par motor cojinetes1 cojinetes2 ángulo girado por eje : 02 Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 15 Problema 3.20 Una piscina de paredes verticales y de 18 m2 de sección dispone de una válvula de desagüe de tipo esférica de cuarto de vuelta, como se muestra en la figura. El fabricante de la válvula facilita la relación no lineal entre la constante de fricción Kp de la misma y el ángulo de apertura θ, siendo Kp = 10−6 · θ2 (observe la gráfica). Qe h(t) qs(t) Kp (m7/2/kg1/2) Densidad del agua 1000 Kg/m3 Aceleración de la gravedad 9.8 m/s2 q=Kp (p1-p2)1/2 Abierta 90º 2 1 0º Cerrada ángulo de apertura 0.009 0.008 0.007 0.006 0.005 0.004 0.003 0.002 0.001 0 0 K =10−6 θ2 p 10 20 30 40 50 60 70 80 90 θ (grados) La piscina está constantemente alimentada por un caudal de Qe = 10·10−3 m3 /s. Suponga que a las 12:00 horas la piscina está vacı́a. Se pide: a) Dibuje la actuación sobre la válvula (ángulo de apertura de la válvula) y la evolución del nivel desde las 12:00 hasta las 13:00 si se pretende conseguir como objetivo alcanzar y mantener un nivel de 1 metro en el menor tiempo posible. b) A las 13:00 horas se lanzan a la piscina varios niños para jugar, siendo el volumen ocupado por sus cuerpos de 1m3 . Este hecho se puede considerar como un impulso unitario en el caudal de entrada. A las 14:00 horas los niños abandonan la piscina (considerado igualmente como un impulso). Haga los cálculos necesarios y dibuje la evolución del nivel de agua desde las 13:00 hasta las 19:00 horas. (la válvula no se ha manipulado en este periodo, se queda en el valor calculado en el punto anterior). c) Una vez estabilizado el nivel a las 19:00 se cierra la válvula 0.1 grados. Calcule la evolución del nivel de agua hasta las 24:00 horas. Nota: dado que el sistema es no lineal, la evolución del nivel se calculará de forma aproximada a partir del modelo linealizado en torno a punto de equilibrio apropiado Depto. Ing. de Sistemas y Automática. ESI. US. 16 Problema 3.21 Un aerogenerador es una instalación que permite producir energı́a eléctrica a partir de la energı́a del viento. La figura adjunta muestra un modelo simplificado de un aerogenerador: el eje1 tiene acopladas las palas y su velocidad angular es baja. Cuando hace viento, este eje recibe un par T1 (t) que es el par responsable del movimiento del conjunto eje1-engranaje-eje2-generador. El eje2 es el eje de velocidad angular alta, en el mismo está acoplado el generador que opone un par Tg al movimiento de este eje. aerogenerador cojinetes1 T1 N1 01 eje1 02 Tg eje2 cojinetes2 N2 generador Se dispone de la siguiente información: • el eje1 junto con su rueda dentada tiene un momento de inercia J1 • el eje2 junto con su rueda dentada y el rotor del generador presenta un momento de inercia J2 • las fricciones viscosas que se presentan en el eje1 se modelan agrupadas en el coeficiente de fricción viscosa B1 . • las fricciones viscosas en el eje2 se modelan agrupadas en un sólo coeficiente B2 . • el número de dientes de la rueda dentada del eje1 es N1 , y el de la rueda el eje2 es N2 . Tenga en cuenta que utilizamos una reductora y por lo tanto ha de cumplirse que trabajo el trabajo realizado por un engranaje ha de ser el mismo que el desarrollado por el otro (suponiendo que no hay fricción) y que el la distancia sobre la superficie que viaja cada engranaje es la misma, por lo tanto: T1 θ 1 = T1 θ 1 θ 1 r1 = θ 2 r2 de aquı́ se deduce que: T1 r1 ω2 θ2 = = = T2 r2 ω1 θ1 Donde T es el par, ω es velocidad angular, θ es ángulo girado y r es el radio del engranaje. Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 17 2 Por otro lado el par motor se emplea en vencer la inercia J ddt2θ , vencer la fricción B dθ dt y proporcionar el par útil Tu . T =J d2 θ dθ +B + Tu 2 dt dt La potencia mecánica es Pm = T ω Se pide: a) Calcule la ecuación diferencial f (ω̇2 , ω2 , T1 , Tg ) = 0. b) Se conocen los siguientes valores de los parámetros, ası́ como de los datos del conjunto cuando trabaja en régimen permanente: • J1 = 100kg · m2 y J2 = 40kg · m2 • N2 = 200 dientes ·m·s ·m·s • B1 = 1 Nrad , B2 = 2 Nrad • Potencia eléctrica generadada en régimen permanente 50 kW (se considera un rendimiento del generador η = 1, es decir, toda la energı́a mecánica aplicada al generador se convierte en energı́a eléctrica) • Par motor aplicado por el viento T1permanente = 9865.6N · m • velocidad angular del eje 2 en régimen permanente ω2permanente = 194 rad/s. Con estos datos ¿cuál debe ser el número de dientes N1 de la rueda 1 y el par del generador Tg ?. c) Exprese ω2 (t) tomando como condiciones iniciales ω2 (0) = 0 y aplicando a partir de t = 0 un par procedente del viento T1 = 9865.6N · m y un par resistente del generador Tg = 400N · m constantes. Problema 3.22 Una empresa fabricante de lunas térmicas para vehı́culos encarga a los alumnos de 2o curso un estudio para conocer el comportamiento de un nuevo espejo retrovisor externo que pretende sacar al mercado. El espejo, en la cara posterior, es recorrido por un fino hilo de resistencia R = 2Ω, que servirá para calentar el vidrio y poder eliminar la escarcha que se pueda formar en condiciones atmosféricas desfavorables (observe la figura). Depto. Ing. de Sistemas y Automática. ESI. US. + + 12V _ regulador de tensión discreto (4V / 8V) 18 espejo 4V u 8V en función del termostato _ Termostato La resistencia del espejo no se conecta directamente a la baterı́a de 12 V del vehı́culo, sino que lo hace a un regulador de tensión intermedio que alimentará a la resistencia bien a 4V, o bien, a 8V, en función de un termostato conectado al regulador. Concretamente, la empresa está muy interesada en disponer modelos dinámicos en estos dos puntos de trabajo. De esta forma podrá estudiar la viabilidad de añadir un segundo regulador de tensión continuo. La empresa aporta los siguientes datos: • Masa del vidrio 0.3 kg • Calor especı́fico del vidrio 400J/kg o C • Constante de transmisión de calor por convección entre el vidrio y el aire Kconv = 1W/o C SIMPLIFICACIONES: Se supone despreciable la masa de la resistencia. Toda la energı́a eléctrica absorbida se transforma en calor.Considere la temperatura ambiente es de 0o C. La dinámica de transmisión de calor entre la resistencia y el vidrio es muy rápida comparada con la del vidrio y el aire. Nota: el modelo de ecuación diferencial considerando como entrada la tensión aplicada a la resistencia y como salida el incremento de tempertura del vidrio con respecto al 2 V2 ambiente, teniendo en cuenta que Q̇a = V · I = VR es Cr · mv · dT dt = R − Kconv · T Se pide: a) La temperatura alcanzada en régimen permanente por el vidrio cuando se aplica 4V a la resistencia. b) La temperatura alcanzada en régimen permanente por el vidrio cuando se aplica 8V a la resistencia. c) Función de transferencia del sistema cuando se trabaja en torno a los 4V. d) Función de transferencia del sistema cuando se trabaja en torno a los 8V. e) Suponiendo que se está trabajando a 4V, exprese la evolución de temperatura del vidrio T(t) cuando hay un incremento de 0,1 voltios (en forma de escalón) en la entrada. Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 19 f) Suponiendo que se está trabajando a 8V, exprese la evolución de temperatura del vidrio T(t) cuando hay una variación de -0,1 voltios (en forma de escalón) en la entrada. g) Suponiendo el espejo en equilibrio a 0o C y que el regulador en el instante t=0 pasa a aplicar 4V al espejo. Indique en cuanto tiempo alcanzará el espejo la temperatura de 7.6o C. h) Suponiendo el espejo en equilibrio a 0o C y que el regulador en el instante t=0 pasa a aplicar 8V al espejo. Indique en cuanto tiempo alcanzará el espejo la temperatura de 7.6o C. Problema 3.23 vista posterior tambor D=40 cm Motor d=4 cm Centro de masas de la ropa húmeda a 2 cm de la pared del tambor Interior del tambor: la ropa húmeda en ciclo de centrifugado sigue una trayectoria circular Interesa estudiar el giro del tambor de una lavadora en el ciclo de centrifugado (velocidad alta). Para ello se realizan las siguientes consideraciones: 1- Se supone que la lavadora dispone de un motor de corriente continua. 2- En el ciclo de centrifugado la velocidad de giro del tambor es alta, por lo que la ropa húmeda se posiciona junto a la pared del tambor por efecto de la fuerza centrı́fuga, por tanto, gira solidaria al tambor, (observar figura superior derecha). Datos de los parámetros del motor: resistencia eléctrica, Re = 5 Ohmios, con·s stante de fuerza contraelectromotriz, Kce = 0.095 Vrad , constante de par, Kp = 0.095 NA·m , momento de inercia del rotor del motor Jmotor = 6.1 · 10−4 kg · m2 , fricción viscosa de los ·m·s cojinetes del rotor y escobillas, Bmotor = 9 · 10−5 Nrad . Autoinducción La = 0 Henrios. Datos dimensionales de la transmisión : diámetro de la rueda mayor D = 40cm, diámetro de la rueda menor d = 4cm, (observe la figura superior izquierda). Simplificación: las poleas no presentan pérdidas por fricción con la correa y sus momentos de inercia son despreciables. A nivel de modelado, la transmisión con poleas y correas puede ser tratada como engranajes. Datos constructivos del tambor: no se dispone del momento de inercia del tambor Jtambor aunque se sabe que está compuesto por tres piezas de acero inoxidable (mismo material y mismo espesor) soldadas, de las que se conoce sus masas y dimensiones mostradas en la figura inferior. El tambor en su conjunto presenta una constante de fricción viscosa 20 Depto. Ing. de Sistemas y Automática. ESI. US. ·m·s (cojinete del tambor y otras fricciones). Btambor = 50 · 10−5 Nrad Piezas que forman el tambor R=28 cm R=28 cm disco masa 4 kg R=28 cm tambor masa 15 kg r=14 cm cilindro hueco masa 8 kg corona masa 3 kg Datos de la ropa húmeda: no se dispone del momento de inercia de la ropa húmeda Jropa respecto al eje de giro del tambor, aunque se puede calcular con las siguientes simplificaciones: se considera que la masa de la ropa húmeda será de 5kg durante el ciclo de centrifugado y estará concentrada en su centro de masas que se mantendrá a 2cm de la pared cilı́ndrica del tambor. Nota importante: no considere los pares producidos por la fuerza de la gravedad sobre el tambor por albergar la masa de ropa húmeda, (pares sinuoidales). Nota: Información sobre los momentos de inercia que se puede encontrar en libros de fı́sica: R P J = masai · radio2i (masas puntuales) J = ρ · radio2 dV (medio continuo) anillo delgado respecto a su eje de revolución: J = masa · radio2 cilindro macizo respecto a su eje de revolución: J = masa·radio2 2 Se pide: a) Modelo (paramétrico, no numérico) en forma de ecuación diferencial y función de transferencia del sistema en ciclo de centrifugado, considerando como entrada la tensión aplicada al motor V y como salida la velocidad de giro del tambor ω. (nota en la ec. dif. y función de transferencia sólo aparecerán como parámetros: Re , Kce , Kp , Jmotor , Bmotor , D, d, Jtambor , Btambor y Jropa ). con b) Cálculo Jtambor y Jropa . Función de transferencia numérica G(s) = ωtambor V ωtambor [rad/s] y V [V ]. Indique el valor de la ganancia estática Kest y la constante de tiempo τ . c) Suponiendo que la función de transferencia es G(s) = y V [V ]. ωtambor V = 1 7·s+1 ; con ωtambor [rad/s] d) Si se considera que el sistema es lineal en todo el rango de funcionamiento (V > 0), dibuje: • La caracterı́stica estática del sistema. Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 21 • La evolución de la velocidad en r.p.m. del tambor cuando tras haber estado aplicando 100V (y estabilizarse la salida) se aplican (en el instante t = 0s) 220V al motor.(Dé un valor numérico al punto inicial, punto final y un punto intermedio) • ¿Qué par debe suministrar el motor en el eje de giro de tambor en régimen permanente si V = 220V ?. • ¿Qué tensión hay que aplicar al motor para centrifugar a 1000 r.p.m. en régimen permanente?. • Si el sistema tuviese la caracterı́stica estática mostrada en la figura, dibuje la evolución de la velocidad en r.p.m. del tambor cuando tras haber estado aplicando 100V y estabilizarse la salida, se aplican (en el instante t = 0s) 220V al motor. (Dé un valor numérico al punto inicial, punto final y un punto intermedio) e) ¿Cómo quedarı́an las ecuaciones básicas del sistema si nos informan que en la transmisión se pierde un 5% de la potencia útil en el eje del motor? (potencia útil será la disponible en el eje para mover las cargas externas al motor) Problema 3.24 vista posterior Tambor tambor D=40 cm Motor d=4 cm ropa y agua Ffriccion comportamiento de la ropa y agua en ciclo de lavado Interesa estudiar el giro del tambor de una lavadora en el ciclo de lavado (velocidad baja). Para ello se realizan las siguientes consideraciones: 1- Se supone que la lavadora dispone de un motor de corriente continua. 2- En el ciclo de lavado la velocidad de giro del tambor es baja, por lo que la ropa es volteada junto con el agua en la parte baja del tambor (figura superior derecha). Datos de los parámetros del motor: resistencia eléctrica, Re = 5 Ohmios, con·s stante de fuerza contraelectromotriz, Kce = 0.095 Vrad , constante de par, Kp = 0.095 NA·m , momento de inercia del rotor del motor Jmotor = 6.1 · 10−4 kg · m2 , fricción viscosa de los ·m·s . Autoinducción La = 0 Henrios. cojinetes del rotor y escobillas, Bmotor = 9 · 10−5 Nrad Datos dimensionales de la transmisión : diámetro de la rueda mayor D = 40cm, diámetro de la rueda menor d = 4cm, (observe la figura superior izquierda). Simplificación: las poleas no presentan pérdidas por fricción con la correa y sus momentos de inercia son despreciables. A nivel de modelado, la transmisión con poleas y correas puede Depto. Ing. de Sistemas y Automática. ESI. US. 22 ser tratada como engranajes. Datos del tambor: radio del tambor R = 28cm; momento de inercia del tambor ·m·s (cojinete del Jtambor = 1kg · m2 ; constante de fricción viscosa Btambor = 50 · 10−5 Nrad tambor y otras fricciones). Datos de la ropa y agua: se considera que la ropa y agua presentan una fuerza tangencial Ff riccion que es proporcional al cuadrado de la velocidad angular del tambor y ·s2 contraria al movimiento del mismo: Ff riccion = Kf · ω 2 , con Kf = 0.6786 N . rad2 Se pide: a) Modelo paramétrico en forma de ecuación diferencial del sistema en ciclo de lavado, considerando como entrada la tensión aplicada al motor V y como salida la velocidad de giro del tambor ω. (nota en la ec. dif. sólo aparecerán como parámetros: Re , Kce , Kp , Jmotor , Bmotor , D, d, Jtambor , Btambor , R y Kf ). b) Suponiendo condiciones iniciales nulas y que la ecuación diferencial se cumple el todo el rango de funcionamiento V > 0, dibuje la caracterı́stica estática del sistema. c) Linealice el sistema en el punto de trabajo Vo = 12V . Obtenga la función de transtambor . ferencia G(s) = ∆ω∆V d) Suponiendo que la función de transferencia del apartado anterior es G(s) = 0.14 0.8·s+1 ; con ωtambor [rad/s] y V [V ]. ∆ωtambor ∆V = • d.1) dibuje: – La evolución de la velocidad en r.p.m. del tambor cuando tras haber estado aplicando 12V (y estabilizarse la salida) se aplican (en el instante t = 0s) 9V al motor.(Dé un valor numérico al punto inicial, punto final y un punto intermedio) • d.2) ¿Qué par debe suministrar el motor en el eje de giro del tambor en régimen permanente si V = 12V ?. • d.3)¿Qué tensión hay que aplicar al motor para lavar a 60 r.p.m. en régimen permanente?. nota: El par sobre un eje de una fuerza tangencial F es el producto vectorial de r por el vector F, siendo r el vector director (o radio vector: origen el centro del eje y destino el punto de aplicación de la fuerza). Problema 3.25 Las siguientes ecuaciones modelan la dinámica de altitud de un avión: d2 a da + 4 + 4a = 3E dt2 dt d2 h = 6a − E dt2 Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 23 a E h Altura de crucero siendo E el ángulo del elevador (entrada al sistema), a el ángulo de elevación sobre la horizontal y h la altitud del avión (salida del sistema), medida respecto a la altitud de crucero. Se desea analizar la influencia de E sobre h. Para ello, se pide: a) Dibuje el diagrama de bloques del sistema, siendo E la entrada y h la salida, en función exclusivamente de bloques integradores y ganancias. b) Calcule, mediante álgebra de bloques, la función de transferencia equivalente del sistema. c) Obtenga una descripción interna del sistema en forma matricial. d) Calcule los polos (x) y ceros (0) y sitúelos en el plano adjunto. ¿Es estable el sistema? e) Dibuje de forma cualitativa (sin calcular la antitransformada) la respuesta del sistema ante un escalón en la entrada E, partiendo de condiciones iniciales nulas (correspondientes a las condiciones de crucero). ¿Puede tomar la salida valores negativos ante escalones positivos de E? Justifique la respuesta. Problema 3.26 Un vehı́culo de masa m se mueve en lı́nea recta sobre un plano horizontal propulsado por una fuerza F (t) proporcionada por el motor (entrada al sistema). Se considera el efecto de la fricción aerodinámica como una fuerza Fa (t) = 21 Cx v 2 (t) siendo Cx un parámetro y v(t) la velocidad (salida del sistema). Sobre el vehı́culo actúan la fricción aerodinámica Fa , que se opone al movimiento, y la fuerza de tracción F , por tanto: m dv(t) 1 + Cx v 2 (t) − F (t) = 0 dt 2 Se pide: a) Modelo linealizado en torno a una velocidad de equilibrio v0 , siendo α(t) = v(t) − v0 y β(t) = F (t) − F0 . b) Obtener la expresión de α(t) cuando la entrada β(t) tiene la forma representada en la figura. 24 Depto. Ing. de Sistemas y Automática. ESI. US. 60 50 b 40 30 20 10 0 0 5 10 15 20 25 30 35 40 45 Tiempo c) Se instala en el vehı́culo un control de crucero para que la salida del sistema siga una referencia r(t), de manera que β(t) = Kc (r(t) − α(t)). Determinar la gama de valores de Kc que consiguen que la salida del sistema sea igual a la referencia en régimen permanente. Problema 3.27 Un sistema dinámico se representa por el siguiente conjunto de ecuaciones: dy +y+z = u dt dz dy − − 2y = −z dt dt Siendo u(t) las señal de entrada del sistema. Se pide a) Calcular la función de transferencia Y (s) U (s) . b) Calcular la función de transferencia Z(s) U (s) . c) Calcular las funciones de transferencia T (s) y H(s) para que el sistema se pueda representar por el siguiente diagrama de bloques Fundamentos de Control Automático, U(s) 2o 25 Grd. Ing. Tecn. Industrial. Y(s) H(s) Z(s) T(s) d) Determinar una posible descripción interna del sistema. Problema 3.28 Calcule mediante el algebra de bloques la función de transferencia H(s) = como un cociente entre polinomios en G(s). Y (s) U (s) expresado G(s) G(s) G(s)/2 + U(s) _ _ _ + G(s) + + Y(s) G(s)/2 + G(s) Problema 3.29 Un soldador de estaño es una herramienta que sirve para transmitir calor y fundir el “estaño comercial” usado en aplicaciones electrónicas. Su pieza principal, llamada punta, es de cobre y puede aproximarse a un cilindro macizo de 4mm de diámetro por 80mm de longitud. La punta es calentada por una resistencia eléctrica que la envuelve parcialmente, (convenientemente aislada dentro de una carcasa de metal), tal como muestran las figuras adjuntas. El extremo libre de la punta es el usado para fundir el material por contacto. Depto. Ing. de Sistemas y Automática. ESI. US. 26 Soldador mango carcasa punta 220V 40W interior del soldador carcasa 230V 40W punta La placa de caracterı́sticas del soldador indica una potencia eléctrica de 40W cuando se conecta a la red de 220V . Partiendo de una temperatura ambiente de 25 o C y estando el soldador en equilibrio a esta temperatura, se conecta en el instante t = 0 a la red. Se desea conocer: a) ¿cuál es la temperatura que alcanza la punta a los 35 segundos de conectar el soldador? b) ¿cuál será la temperatura máxima que podrá alcanzar la punta? c) ¿cuándo se alcanzará el 95% del incremento máximo de la temperatura de la punta? d) ¿Podrá fundir un pequeño trozo de ”estaño comercial” al minuto de conectar el soldador? e) Si se aisla térmicamente el soldador conectado ¿cuánto tiempo tardará en fundirse la punta? (se supone que la resistencia está fabricada en un material con un punto de fusión más alto que el del cobre). Datos: • Calor especı́fico del cobre 385J/kg o C • Densidad del cobre 8920kg/m3 • Constante de transmisión de calor por convección entre la punta y el aire Kconv = 0, 1W/o C • Temperatura de fusión del ”estaño comercial” (60% estaño 40% plomo) 190 o C • Temperatura de fusión del cobre 1085 o C NOTA: Se supone despreciable el calor absorbido por la carcasa, la resistencia y el mango, y que toda la energı́a eléctrica absorbida de la red se transforma en calor. Dada la alta conductividad térmica del cobre se supone que la punta presenta una distribución homogénea de temperatura. Fundamentos de Control Automático, 2o 27 Grd. Ing. Tecn. Industrial. Para la pieza llamada punta se pueden plantear las ecuaciones de balance de energı́a d(Tp −Tamb ) = Q̇a − Q̇c , siendo Q̇a el calor absorbido por la punta por unidad de Cr · mp · dt tiempo, Q̇c el calor cedido por la punta al ambiente por unidad de tiempo, que es igual a Kconv por la diferencia de temperaturas entre la punta y el aire, mp la masa de la punta y Cr el calor especı́fico del cobre. d(T −T ) De modo que se tiene Cr · mp · p dt amb = Q̇a − Kconv · (Tp − Tamb ) Problema 3.30 Calcule mediante el algebra de bloques la función de transferencia G(s) = U + 1/D(s) A(s) _ 1/C(s) + + 1/A(s) + 2 Y (s) U (s) . Y + _ + _ C(s) D(s) + + Problema 3.31 La figura adjunta muestra una instalación hidráulica formada por un tanque unido a un embalse por una válvula con constante fricción global Ke (t) que podrá variarse a voluntad 5/2 entre 0 y 0.02 ms . El tanque tiene una superficie A = 10 m2 y descarga a través de una tuberı́a que presenta una constante de fricción Ks = 0.001 del embalse constante y de valor H = 1, 25m. m5/2 s . Se considera el nivel En este sistema el nivel de agua en el depósito h(t) será considerado como la variable de salida y Ke (t) como la variable de entrada. 28 Depto. Ing. de Sistemas y Automática. ESI. US. Embalse Tanque A H=1.25 m h(t) Ke(t) Ks Se pide: • a) calcule la altura de equilibrio del depósito ho cuando la válvula presente una 5/2 constante de fricción Keo = 0.002 ms e indique cuál es el caudal de salida Qso . • b) considerando que el sistema están trabajando cerca del punto de equilibrio el apartado a), obtenga la función de transferencia. • c) indique la altura mı́mina y máxima que podrá alcanzar el depósito. • d)¿qué punto de equilibrio presenta mayor rapidez de respuesta ante un cambio en la válvula, el correspondiente a ho = 1m o el correspondiente a ho1 = 0.1m? Justifique la respuesta. Problema 3.32 Las figuras adjuntas muestran una instalación hidráulica en dos instantes distintos. La instalación está constituida por un tanque unido a un embalse por una válvula (situada a 0.5 m del fondo) con una constante fricción global Ke (t) que podrá variarse a voluntad 5/2 entre 0 y 0.002 ms . El tanque tiene una superficie A = 10 m2 y descarga a través de una tuberı́a que presenta una constante de fricción Ks = 0.001 del embalse constante y de valor H = 1, 25 m. m5/2 s . Se considera el nivel En este sistema el nivel de agua en el tanque h(t) será considerado como la variable de salida y Ke (t) como la variable de entrada. Fundamentos de Control Automático, 2o Tanque Embalse Tanque Embalse 29 Grd. Ing. Tecn. Industrial. A A H=1.25 m H=1.25 m 0.5m Ke(t) 0.5m h(t) Ks Fig.1: Válvula poco abierta Ke(t) Fig.2: Válvula muy abierta h(t) Ks El comportamiento del sistema se modela con las siguientes ecuaciones: A dh(t) dt = Ke (t) H − h(t) − Ks h(t), p p √ p A dh(t) = K (t) H − 0.5 − K h(t), e s dt si h(t) ≥ 0.5 si h(t) < 0.5 Se pide: a) Calcule la caracterı́stica estática del sistema. b) Calcule el nivel máximo hmax que podrá alcanzar el tanque en régimen permanente. c) Calcule la constante de fricción de equilibrio para que la altura de equilibrio del tanque sea de 0.25m, indique cuál es el caudal de salida y obtenga la función de transferencia del sistema linealizado en este punto. d) Calcule la constante de fricción de equilibrio para que la altura de equilibrio del tanque sea de 1m, indique cuál es el caudal de salida y obtenga la función de transferencia del sistema linealizado en este punto. e) ¿Qué punto de equilibrio presenta mayor rapidez de respuesta ante un cambio en la válvula, el correspondiente a ho = 0.25m o el correspondiente a ho1 = 1m? Justifique la respuesta. Problema 3.33 En una planta quı́mica se desea controlar el nivel de uno de los depósitos de almacenamiento de productos. Los productos se extraen del reactor mediante una bomba que impulsa un caudal volumétrico q(t) = Cb w2 (t) [m3 /min], siendo w(t) [r.p.s] la velocidad del motor. Este motor incorpora un variador de velocidad tipo PI que controla la misma para que alcance una velocidad de consigna wr (t) que es manipulable. La dinámica del motor controlado por el variador responde como un sistema de primer orden con ganancia unidad y constante de tiempo τ . 30 Depto. Ing. de Sistemas y Automática. ESI. US. Este caudal se acumula en un primer depósito cónico tal que el volumen acumulado √ es v1 (h1 ) = αh31 [m3 ]. El depósito 1 desagua por gravedad con un caudal q1 = k1 h1 [m3 /min] sobre un depósito de sección√constante A [m2 ] y cuya altura es h2 (t). Este depósito se vacı́a con un caudal q2 = k2 h2 [m3 /min]. El comportamiento dinámico del sistema se puede modelar con el siguiente conjunto de ecuaciones: q(t) = Cb w2 (t) τ dw(t) dt = wr (t) − w(t) v1 (t) = αh1 (t)3 √ dv1 (t) dt = q(t) − k1 h1 v2 (t) = Ah2 (t) √ √ dv2 (t) dt = k1 h1 − k2 h2 Los parámetros del sistema (en las unidades adecuadas) son: k1 = √ √ 0.0283, α = 2/2, A = 3 2, τ = 1. √ 2, k2 = 2, Cb = Se desea controlar la altura h2 en torno al punto de diseño ho2 = 2 m. Se pide: a) Determinar la caracterı́stica estática. b) Determinar la consigna wro y las altura ho1 correspondientes al punto de funcionamiento. c) Determinar el modelo linealizado del sistema y su correspondiente función de transferencia en torno al punto de funcionamiento. Problema 3.34 Se desea controlar la posición de un cuerpo mediante un sistema de levitación magnética. Este consiste en una bobina que al excitarse con una intensidad i(t) (variable manipulable), crea un campo magnético que produce una fuerza de sustentación sobre un cuerpo metálico que permite contrarrestar el peso. La posición del objeto x(t) (distancia de la bobina al objeto) se mide con un dispositivo óptico que provee una medida de tensión Vs = Ks x. La ecuación que rige el movimiento del objeto es: m d2 x(t) i(t)2 = mg − k dt2 x(t)2 Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 31 Se sabe además que el objeto pesa 100 gramos y que cuando se excita la bobina con una intensidad de 1 amperio, el objeto permanece en equilibrio a 10 cm de la bobina y la tensión Vs medida es de 1 voltio. Se pide: a) Determinar la caracterı́stica estática del sistema. b) Determinar el modelo linealizado del sistema y su función de transferencia correspondiente para controlar el objeto en torno a 20 cm. Problema 3.35 En una planta de aguas residuales se desea controlar el nivel de uno de los depósitos de decantación de agua tratada. Como se muestra en la figura adjunta, la entrada de agua tratada se regula mediante una válvula de control y llena el depósito 1. Este depósito está conectado a un segundo depósito (depósito 2). Qe h1 h2 Qi Qs Se desea controlar la altura del depósito 2 en torno a 4 metros de altura, manipulando la apertura de la válvula x ∈ [0, 1]. La caracterı́stica de la válvula es isoporcentual (Qe = Kvs Rx−1 ) y se sabe que completamente abierta el caudal es de 15 m3 /h y que R = 25. Además se sabe que la dinámica de la planta responde a las siguientes ecuaciones dh1 dt dh1 A2 dt A1 p = Qe − k1 h1 − h2 p p = k1 h1 − h2 − k2 h2 Depto. Ing. de Sistemas y Automática. ESI. US. 32 √ √ siendo A1 = A2 = 20m2 , k1 = 4m3 /(h m) y k2 = 5m3 /(h m). Se pide: a) Determinar la apertura y la altura del depósito 1 correspondientes al punto de funcionamiento deseado. b) Determinar la caracterı́stica estática del sistema. c) Determinar el modelo linealizado del sistema y su correspondiente función de transferencia en torno al punto de funcionamiento. Problema 3.36 Una empresa de dispositivos electrónicos ha desarrollado un sistema de posicionamiento utilizando como actuador un electroimán. El sistema en cuestión se puede modelar como un cuerpo de masa m de 100 gramos unido al bastidor mediante un muelle de constante elástica K = 0.1 N/m y elongación natural ln 5 cm y un amortiguador de constante de fricción B = 0.2 N/(m/s). Situado verticalmente sobre el cuerpo a una distancia L de 20 cm se sitúa el electroimán que se excita con una intensidad i(t) que se puede manipular. El modelo del sistema responde a la siguiente ecuación diferencial m d2 x(t) dx(t) i(t)2 + B + K(x(t) − l ) + mg − A n dt2 dt (L − x(t))2 siendo x(t) la posición del cuerpo respecto al bastidor. Se sabe además que el objeto pesa 100 gramos y que cuando se excita la bobina con una intensidad de 1 amperio, el objeto permanece en equilibrio en la elongación natural del muelle. El sistema de control debe regular la posición entorno a 10 cm. Se pide: a) La ecuación que define la caracterı́stica estática y calcular el punto de funcionamiento. b) Determinar el modelo linealizado del sistema. Problema 3.37 Se dispone de un brazo robótico de un grado de libertad como el de la figura accionado mediante un motor de corriente continua de excitación independiente (variable manipulable V) con el que se desea controlar el ángulo del brazo con respecto a la vertical. Fundamentos de Control Automático, 2o 33 Grd. Ing. Tecn. Industrial. θ m l τ g La variable de salida θ es el ángulo del péndulo medido desde la posición superior; Ja es la inercia del sistema; m es la masa del brazo y g es la gravedad. Además de la gravedad existen dos fuerzas no potenciales que son el par motor τ y la fricción del sistema ρθ̇ (se supone que sólo existe fricción viscosa), donde ρ es el coeficiente de rozamiento asociado a la fricción. De esta forma la ecuación que describe el movimiento del brazo en función del par τ generado por motor es la siguiente: Ja θ̈ + ρθ̇ − mgl sin θ = τ Por otro lado las ecuaciones que rigen el el comportamiento del motor son las siguientes: V = Ri + Kce ω τ = Cp i ω = θ̇ Los parámetros del sistema son: resistencia de la armadura R = 100Ω, constante de par Cp = 12.5 Nm/A, constante contraelectromotriz Kce = 0.3 V/rad/s, momento de inercia del brazo Ja = 0.1 kg/m2, coeficiente de fricción del brazo ρ = 0.5 Nm/rad/s, masa del brazo m = 100 gr, aceleración de la gravedad g = 9.81 m/s. Se pide: a) Calcular la longitud del brazo sabiendo que el sistema permanece en reposo para una tensión de entrada al motor de -5V en un ángulo de θ = π/2. b) Linealizar el sistema y calcular la función de transferencia en torno al punto de funcionamiento θ = π/2. Depto. Ing. de Sistemas y Automática. ESI. US. 34 Problema 3.38 Se dispone de un sistema electromecánico que ha sido modelado atendiendo a sus caracterı́sticas fı́sicas obteniéndose el siguiente modelo: ÿ(t) + aẏ(t) − cy 2 (t) = 12.5z(t) u(t) − dz(t) ẏ(t) = α dónde a = 5, c, d = 100, α = 0.3 son parámetros fı́sicos del sistema y siendo u(t) e y(t) la entrada y salida del sistema respectivamente. Se pide: a) Calcular el valor del parámetro c de forma que el sistema presente una salida en régimen permanente unitaria ante una entrada u = −1. b) Linealizar el sistema y calcular la función de transferencia en torno al punto de funcionamiento y = 1. Problema 3.39 En una planta de productos alimenticios se dispone de un sistema de calentamiento de agua de servicio basada en una caldera de combustible lı́quido, cuyo esquema se muestra en la siguiente figura: Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 35 El sistema consiste en un motor de corriente continua que acciona una bomba de impulsión de combustible cuyo caudal de salida qc (t) se quema en una caldera produciendo una potencia calorı́fica P (t) = ηCc qc (t), siendo η = 0.7 el rendimiento de la caldera y Cc = 4.8 1010 J/m3 la capacidad calorı́fica del combustible. Esta calienta el depósito aislado térmicamente de sección A = 1 m2 en el que entra un caudal q(t) de agua de servicio a Tc = 20o C y sale caudal a la temperatura T (t). El depósito se descarga por el efecto de la gravedad y el coeficiente de descarga es k = 1.6 10−4 (m3 /s)/m1/2 . Se asume además que se pueden despreciar las pérdidas con el ambiente y que la temperatura en el depósito es homogénea e igual a la temperatura del agua de salida T (t). Teniendo en cuenta esto, se determina el siguiente modelo del sistema: Ca Ah(t) d(T (t)) dt dh(t) A dt = ηCc qc (t) + Ca q(t)(Tc − T (t)) = q(t) − qs (t) q qs (t) = k h(t) Se desea controlar la temperatura del agua de servicio en torno a los T0 = 60 o C, manipulando el caudal de agua de entrada al depósito q(t). Se sabe que en el punto de funcionamiento del sistema q0 = 1.8 10−4 m3 /s y que la capacidad calorı́fica del agua Ca = 4.185·106 J/(m3 o C). Se pide: a) Determinar la caracterı́stica estática del sistema. b) Determinar el modelo linealizado del sistema y su correspondiente función de transferencia en torno al punto de operación. Problema 3.40 Se desea controlar la reacción quı́mica que se desarrolla en un reactor en tanque continuamente agitado (CSTR). Este sistema está formado por un tanque en el que tiene lugar una reacción exotérmica irreversible de descomposición A → B. El carácter exotérmico de la reacción provoca una continua generación de calor en el seno del tanque que se evacua por medio de una camisa de refrigeración por la que circula el lı́quido refrigerante, cuya temperatura es Tc y se considera uniforme en toda la camisa. El lı́quido refrigerante se enfrı́a mediante un sistema de refrigeración dotado de un sistema de control de temperatura que incorpora acción integral. La referencia de temperatura de este sistema Tr se puede manipular. El objetivo de control es regular la concentración de reactivo del producto CA actuando sobre la referencia temperatura de refrigerante Tr . Variando Tr se varı́a la temperatura del 36 Depto. Ing. de Sistemas y Automática. ESI. US. refrigerante Tc , modificando ası́ la temperatura del tanque y, por lo tanto, la temperatura a la que se realiza la reacción. En consecuencia se acelera o decelera la reacción, variando la concentración de reactivo. El departamento de ingenierı́a de la planta ha desarrollado el siguiente modelo del reactor: d CA (t) dt d T (t) dt 9000 ·CA (t) = (1 − CA (t)) − 6 · 10 · exp − T (t) 9000 10 ·CA (t) + 2·(Tc (t) − T (t)) = (370 − T (t)) + 2 · 10 · exp − T (t) 10 donde CA es la concentración del reactivo A en el tanque, T es la temperatura en el mismo y Tc es la temperatura del refrigerante. Además el sistema de refrigeración responde a un sistema de primer orden de constante de tiempo de 2 minutos. Se desea diseñar un sistema de control para regular la concentración de reactivo en la corriente de salida CA (t) en torno a un punto de funcionamiento CA0 = 0.5 mol/l. Se pide: a) Determinar la caracterı́stica estática del sistema. b) Determinar el modelo linealizado del sistema y su correspondiente función de transferencia en torno al punto de funcionamiento. Problema 3.41 Muchas Universidades del mundo poseen un péndulo invertido para demostrar resultados de control. La razón por la cual este problema es interesante desde el punto de vista de control es porque ilustra muchas de las dificultades asociadas con problemas de control del mundo real. El péndulo invertido rotante, conocido también como Péndulo de Furuta, consiste en un brazo giratorio horizontal, el cual posee en su extremo una barra vertical la cual gira libremente alrededor de un eje paralelo al brazo. Se desea controlar la posición angular de la barra vertical actuando sobre su base a través de un servomecanismo. Se ha desarrollado un modelo (muy) simplificado de la dinámica de la varilla teniendo en cuenta la fuerza aplicada, el peso y el rozamiento del eje. La acción de control es la fuerza aplicada sobre la barra (F) y la señal de salida es la posición angular de la varilla (theta). La ecuación diferencial que describe el comportamiento aproximado del sistema es: I d2 θ dθ − mgl sin θ − F l cos θ + b =0 dt2 dt Fundamentos de Control Automático, 2o Grd. Ing. Tecn. Industrial. 37 Los valores de los parámetros del modelo son m=0.2, b=0.03, I=0.006, g=9.8 y l=0.5. Se pide: a) Obtener un modelo lineal del sistema en el punto de equilibrio determinado por theta0 = 0 y F0 = 0. Calcular su función de transferencia G1(s). b) Obtener un modelo lineal G2(s) del sistema en el punto de equilibrio determinado por theta0 = pi y F0 = 0. Calcular su función de transferencia G2(s).