12. ANÁLISIS DINÁMICO POR MÉTODOS NUMÉRICOS
Anuncio

12. ANÁLISIS DINÁMICO POR MÉTODOS
NUMÉRICOS
12.1. Introducción
Por medio del análisis dinámico tratamos de encontrar las ecuaciones diferenciales
que gobiernan el movimiento de un mecanismo como consecuencia de su velocidad inicial o de las fuerzas exteriores. La Mecánica Clásica proporciona diversos caminos para obtener dichas ecuaciones. Por ejemplo, aislando cada elemento y aplicando las
ecuaciones de Newton-Euler, empleando las ecuaciones de Lagrange o empleando el
Teorema de los Trabajos Virtuales. Cualquiera que sea el camino seguido, el resultado
es un conjunto de tantas ecuaciones diferenciales ordinarias como grados de libertad.
El empleo de las coordenadas naturales no introduce ninguna variación conceptual
respecto de los procedimientos ya conocidos. Simplemente, aporta un soporte matemático adecuado para dar a los procedimientos un enfoque general y sistemático. Gracias
a las coordenadas naturales podremos desarrollar las ecuaciones del movimiento de
cualquier sistema mecánico, sin importar cuántos elementos, pares y grados de libertad tenga. Como veremos, para obtener las ecuaciones diferenciales del movimiento
necesitaremos recurrir a las resoluciones de los problemas cinemáticos vistos en el capítulo anterior. Asimismo, necesitaremos recordar brevemente algunos conceptos sobre la integración numérica de ecuaciones diferenciales.
La resolución del análisis dinámico nos proporciona la trayectoria de los grados de
libertad z(t). Para determinar las reacciones en los pares recurriremos al método de
los multiplicadores de Lagrange, un método empleado tradicionalmente en la minimización de funciones sujetas a restricciones. Como veremos, este método nos proporcionará la forma de asociar fuerzas interiores a las ecuaciones de restricción.
Por necesidades de espacio, en este capítulo nos limitaremos a estudiar los mecanismos planos. Los mecanismos tridimensionales no presentan gran dificultad añadida, salvo que el tamaño de las matrices es considerablemente mayor.
© Alejo Avello, Tecnun (Universidad de Navarra).
308
Cap. 12: Análisis dinámico por métodos numéricos
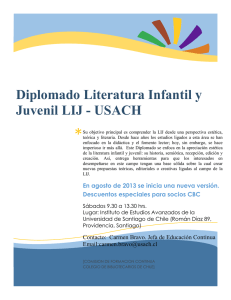
12.2. Fuerzas de inercia de un elemento
Partimos de un sólido definido
mediante dos puntos i y j.
Además del sistema de referencia fijo {0}, definimos un
sistema de referencia {e} cuyo
origen se encuentra en el punto i y cuyo eje xe atraviesa el
punto j. Denominamos Ae a la
matriz de rotación entre los
sistemas de referencia {e} y {0}.
ye
P
erP
y0
xe
j
i
r
ri
Tratemos de escribir las coordenadas de una partícula
x0
material de masa dm situada
Figura 12.1.
en el punto P en función de las
coordenadas de los puntos i y j, para lo cual necesitamos emplear las coordenadas del
punto P en el sistema de referencia {e}, que denominaremos e rP
x 1 x j − xi
r = ri + A e e rP = i +
yi Lij y j − yi
e
x
xi (1 − P ) + yi
Lij
=
e
yP
−
x
i L + yi (1 −
ij
−( y j − yi ) e x P
=
x j − xi e yP
e
e
yP
x
y
+ x j P − yj P
Lij
Lij
Lij
e
e
e
xP
yP
xP
+ yj
) + xj
Lij
Lij
Lij
e
(12.1)
Mediante una simple reordenación de términos, esta expresión se puede escribir en
forma de producto de matriz por vector,
e
x
1 − P
Lij
r= e
− yP
L
ij
e
yP
Lij
e
e
e
x
1− P
Lij
xP
Lij
yP
Lij
e
yP
Lij
−
e
xP
Lij
x
i
yi
x = TP q e
j
yj
(12.2)
donde TP es una matriz de tamaño 2×4, constante en el tiempo, pero variable de una
partícula a otra, y qe es el vector de coordenadas naturales del elemento.
Para calcular la aceleración del punto P basta con derivar dos veces con respecto al
tiempo la ecuación anterior,
r = TP q e
(12.3)
También podemos calcular el desplazamiento virtual del punto P empleando el operador virtual δ sobre la ecuación (12.2),
© Alejo Avello, Tecnun (Universidad de Navarra).
Cap. 12: Análisis dinámico por métodos numéricos
δr = TP δq e
309
(12.4)
La fuerza de la inercia de la partícula P es sencillamente - r dm. El trabajo virtual
producido en un desplazamiento virtual δr del punto P se calculará mediante el producto escalar de la fuerza por el desplazamiento. Llamando δWP a dicho trabajo virtual, tenemos
δWP = −δrT r dm = δqTe TPT TP q e dm
(12.5)
Para calcular el trabajo virtual de todo el elemento deberemos sumar los trabajos
virtuales de todas las partículas por medio de una integral
δWine = ∫V δWP = − ∫V δqTe TPT TP q e dm
(12.6)
En esta ecuación los términos δqe y q e no varían de una partícula a otra, pues contienen las coordenadas de los puntos i y j. Por tanto, podemos sacarlos fuera de la integral, obteniendo
(
)
δWine = −δqTe ∫V TPT TP dm q e
(12.7)
El paréntesis representa una matriz simétrica de tamaño 4×4, y multiplica al vector q e . El resultado es un vector de 4×1 que expresa las fuerzas de inercia del elemento mediante las coordenadas naturales. Por el sentido físico del paréntesis, que es el
de una masa, recibe el nombre de matriz de masas del elemento, que denominaremos
Me.
Con la ayuda de la ecuación (12.2) que contiene la expresión explícita de la matriz
TP, podemos expandir la ecuación anterior para obtener explícitamente la matriz de
masas del elemento,
2
ex
P
+
1 −
L
0
2
ey
+ P
L
2
ey
P
+
L
M e = ∫V TPT TP dm = ∫V
2
ex
P
+ 1−
L
sim.
ex
P ex −
1 −
L P
2
ey
P
−
L
e y ex
P P +
L L
ex e y
P P
+ 1 −
L L
ex
P
L
2
ey
+ P
L
2
© Alejo Avello, Tecnun (Universidad de Navarra).
ey
− P
L
2
e
y
− P +
L
dm
ex ex
P P
+ 1 −
L L
0
2
2
ex e y
(12.8)
P + P
L L
310
Cap. 12: Análisis dinámico por métodos numéricos
Para simplificar la matriz de masas del elemento recordamos el valor de cuatro integrales sencillas que aparecen en la matriz de masas: la masa total del elemento M;
las coordenadas e xG , e yG del centro de gravedad G en el sistema de referencia {e}; el
momento de inercia I respecto del origen de {e}:
∫V dm = M
(12.9)
e
e
∫V x P dm = M xG
(12.10)
e
∫V yP dm = M
(12.11)
∫V
(
e
e
yG
)
x P2 + e yP2 dm = I
(12.12)
Expandiendo los términos y sustituyendo estas cuatro ecuaciones en la ecuación
(12.8) obtenemos la forma final de la matriz de masas:
2 M e xG
M + I −
L
L2
Me =
sim.
0
M+
2 M e xG
I
−
L
L2
M e xG
I
−
L
L2
M e yG
L
I
L2
M e yG
L
M e xG
I
−
L
L2
0
I
2
L
−
(12.13)
Finalmente, podemos escribir el trabajo virtual de las fuerzas de inercia de un elemento como
δWine = −δqTe Me q e
(12.14)
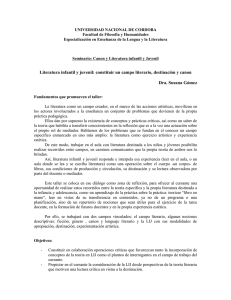
Ejemplo 1. Calcular la matriz de
masas Me de una barra de longitud L y
masa M uniformemente distribuida,
modelizada mediante dos puntos 1 y 2
situados en los extremos de la barra.
En primer lugar, situamos el sistema de referencia {e} en el punto 1 y diFigura 12.2.
bujamos el eje xe apuntando hacia el
punto 2. Es sencillo ver el valor que
toman las coordenadas del centro de gravedad y el momento de inercia respecto del
origen del sistema de referencia del elemento:
L
2
e
xG =
e
yG = 0
© Alejo Avello, Tecnun (Universidad de Navarra).