EFECTO EN RANGO DE MOVIMIENTO EN REDISEÑO DE
Anuncio

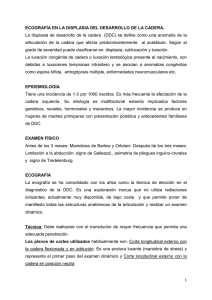
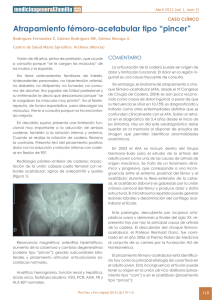
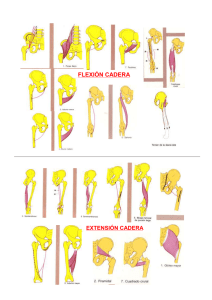
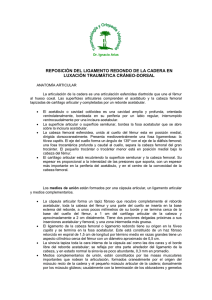
MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO EFECTO EN RANGO DE MOVIMIENTO EN REDISEÑO DE PRÓTESIS DE CADERA. Alvarez Vera Melvyn. Facultad de Ingeniería Mecánica y Eléctrica, Universidad Autónoma de Nuevo León, México Av. Universidad S/N, San Nicolás de los Garza, C.P. 66450, N.L. Teléfono (81)1492 0375, FAX.(81)1052 3321. melvys1@yahoo.com.mx RESUMEN La artroplastia de cadera de superficie se ha incrementado como alternativa de artroplastia total de cadera en pacientes jóvenes y activos que requieren mayor rango de movimiento de articulación. El objetivo de este estudio fue determinar el efecto en rango de movimiento en una artroplastia de superficie para diferentes orientaciones del componente acetabular. Un modelo tridimensional CAD de cadera natural fue creado y los diseños de componentes protésicos fueron implantados en la parte acetabular y femoral. El método cinemático de análisis de la cadera permite comparar el patrón de rango de movimiento y localizar el pinzamiento. Los movimientos analizados fueron flexión, abducción, rotación externa y rotación interna. El rediseño geométrico de copa acetabular permitió incrementar el rango de movimiento antes de llegar al pinzamiento entre el hueso femoral y el componente acetabular. El pinzamiento protésico puede limitar el rango de movimiento a causa de una inadecuada orientación del componente acetabular. ABSTRACT Hip resurfacing arthroplasty has increased as an alternative to total hip arthroplasty in young, active patients requiring a greater range of motion in the joint. The aim of this study was to determinate the effect of the range of motion of the total resurfacing arthoplasty at different orientation of the acetabular component. A three-dimensional CAD model of the natual hip was created and designs of the prosthetic components were implanted. The maximum angles of hip flexion, abduction, internal ratation and external rotation were calculated. Kinematic method of the hip analysis allow to compare the hip range of motion pattern and locate impingement. Geometric redesign of acetabular cup has led to increased range of motion before reaching the point of impingement between the femoral bone and the ISBN: 978-607-95309-3-8 acetabular component. Prosthectic impingement due to an inadequate orientation of the acetabular componenet limit the range of motion of the total hip resurfacing. 1 INTRODUCCIÓN La artroplastia total de cadera es un procedimiento quirúrgico destinado a restaurar la movilidad de la cadera la cual es afectada en su funcionalidad principalmente por fracturas óseas o enfermedades degenerativas de cartílago, el procedimiento consiste en cambiar la parte afectada de la cadera por un implante artroplastico el cual esta compuesto por dos elementos, el primero es el componente femoral el cual es insertado en el hueso del fémur y el segundo es el componente acetabular el cual es insertado en cavidad cotiloidea de la pelvis. Estos implantes pueden ser de dos tipos, el primero de vástago para la artroplastia total de cadera la cual es indicada en fracturas y enfermedad articulares de cartílago en pacientes mayores de 60 años, en el cual es seccionada y removida la cabeza y el canal medular del fémur como se muestra en la figura 1 a), el segundo de superficie para la artroplastia total de superficie o resuperficialización en el cual únicamente se remodela la superficie ósea del fémur sin seccionarla, figura 1 b) [1]. A pesar del reciente interés que ha tenido la comunidad medica en la artroplastia total de superficie, el concepto de la prótesis de cadera de superficie no es nuevo. La primer artroplastia total de cadera de superficie fue realizada por Charley en los años 50’s usando la configuración de articulación de teflón, éste tipo de implante fue asociado con falla temprana por necrosis de la cabeza femoral [2]. En los 70’s la artroplastia de superficie reapareció, como una alternativa para preservar el manto óseo femoral en comparación con la artroplastia total de cadera convencional. Los resultados iniciales pronto dieron rangos de falla inaceptables concernientes a la perdida acetabular y fractura Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO del cuello femoral a acusa de un diseño pobre y métodos inapropiados de manufactura [3-6] ya que es importante tener un conocimiento adecuado de la metalurgia del proceso y las aleaciones [7,8]. En los 80’s el concepto de resuperficialización introducido en los años anteriores condujo a prótesis de cabeza femoral grande con copas acetabulares de pared delgada de Polietileno de Ultra Alto Peso Molecular (UHMWPE) el cual produjo partículas de desgaste significativamente con una alta taza de cirugías de revisión [9,10]. En la década de los 90’s fueron usados prótesis de superficie metal sobre metal y sistemas híbridos con acetábulos no cementados [11]. a) b) Figura 1. Tipos de prótesis de cadera. Artroplastia total de cadera a), artroplastia total de superficie b). Actualmente la artroplastia total de cadera de superficie está indicada como solución a problemas relacionados con enfermedades degenerativas y dolor en la cadera que limitan la movilidad de la articulación de la cadera en pacientes jóvenes [12-14]. Los resultados insatisfactorios de la artroplastia total de cadera convencional en la población más joven menor a 60 años, ha iniciado un nuevo interés en la última década en las prótesis de superficie con todas sus ventajas teóricas [15], preservando la mayor parte de la cabeza y el canal femoral medular intacto lo cual permite una futura cirugía de revisión o reintervención con una prótesis de vástago estándar, si esta fuera necesaria. La cabeza femoral superficializada reproduce lo más cercanamente posible al tamaño anatómico del paciente y provee un tamaño óptimo de componentes que reducen el riesgo de pinzamiento femoro-acetabular el cual consiste en el choque que se produce entre el hueso femoral y el componente protésico acetabular o bien entre hueso del fémur y el ISBN: 978-607-95309-3-8 hueso de la pelvis cuando el movimiento de la extremidad es llevado a su punto máximo. Además se reduce la incidencia de dislocación en el cual la cabeza femoral se sale de su lugar [16,17]. El uso de la prótesis total de cadera de superficie en pacientes activos más jóvenes demanda mayor movilidad de la articulación. Una serie de estudios del rango de movilidad permiten analizar la dislocación y el pinzamiento del cuello femoral causado por el diseño y por la orientación del implante. Un componente femoral de diámetro más grande relativo al diámetro del cuello femoral resulta en un rango mayor de movimiento de la cadera al punto de pinzamiento [18]. Se han reportado por diversos autores un incremento en el rango de movilidad después de la artroplastia de superficie [19,20], sin embargo se han reportado diferencias en el incremento del rango de movimiento después de la artroplastia de superficie comparado con la artroplastia de cadera estándar, estas discrepancias han descrito que las caderas sometidas a superficialización tienen relaciones femorales anormales del cuello y cabeza, lo cual conduce al pinzamiento y un decremento en el rango de movimiento [21]. El rango de movimiento de la artroplastia de superficie observado en un estudio computacional muestra que la movilidad de la cadera es sustancialmente menor en la artroplastia total de resuperficialización que en la artroplastia convencional, en el cual el rango de movilidad está vinculado a la razón de tamaño de cabeza-cuello el cual debe ser mayor a 1.2, y además el pinzamiento del cuello femoral sobre el componente acetabular incrementa el riesgo de dislocación, fractura de cuello y subsecuentemente la perdida del implante [27]. Los resultados en la funcionalidad del rango de movimiento en la artroplastia de superficie ha llevado a considerar el rediseño de la copa acetabular. En este trabajo se presenta un estudio computacional concerniente al rango de movimiento para diferentes diseños acetabulares de una prótesis total de cadera de superficie para mejorar el rango de movilidad, reducir el pinzamiento y el riesgo de dislocación con diferentes orientaciones del componente acetabular. Los resultados fueron comparados con estudios de rango de movimiento de prótesis de superficie y se encontró que tanto la adecuada orientación de los implantes, así como el diseño pueden influir directamente en el rango de movimiento de la cadera. Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO DEX 165º DIN α=0 º 165º β=45 º a) b) c) Figura 2. Características de diseño de los implantes analizados. Componente femoral a). Componente acetabular estándar b) y nuevo diseño de componente acetabular. 2 DESARROLLO 2.1 Desarrollo de una nueva prótesis Los diseños del implante articular fueron realizados de modo que el componente acetabular permita hacer una comparación en el rango de movimiento entre un diseño convencional y el nuevo diseño propuesto en este trabajo (ver figura 2). El diseño del componente femoral fue realizado de acuerdo a la configuración estándar en éste tipo de implantes con un tamaño de cabeza de 46mm, se muestra el diámetro externo DEX = 46mm y el diámetro interno resuperficializado DIN=38.3 mm a). El diseño del primer componente acetabular tiene una configuración estándar con un ángulo de cobertura de 165º y el espesor de la pared de 3 mm y un ángulo de corte α=0º b). El nuevo diseño del componente acetabular al que tiene una cobertura de 165º y el espesor de pared de 3 mm, además el diseño tiene un novedoso ángulo de corte a β=45º en el borde interior que le permite incrementar al rango de movimiento antes de producirse el pinzamiento entre el implante acetabular con el hueso femoral c). 2.2 Modelo de simulación El modelo fue generado de forma virtual tridimensional CAD (diseño asistido por computadora) de una articulación cadavérica de cadera. El modelo del la articulación de la cadera consistió en la reconstrucción articular de los huesos del fémur y la pelvis. El implante virtual de la prótesis de cadera de superficie y el análisis del rango de movimiento fueron realizado usando el software comercial SOLIDWORKS SPO. El tamaño de los componentes femoral y acetabular del implante fueron elegidos de ISBN: 978-607-95309-3-8 acuerdo a las dimensiones del los huesos. El tamaño del componente femoral fue de 46 mm y fue orientado con un ángulo cervicodiafisario de 135º el cual es formado por el ángulo que se genera entre eje longitudinal axial del fémur y la cabeza femoral a) y 0º de anteversión, el cual es generado por el movimiento a la derecha o a la izquierda a partir de la posición central indicada en la figura b). El tamaño del hueso femoral fue de 47 mm con una relación cabeza-cuello 1.227, la cual fue resuperficializado e implantado siguiendo las técnicas quirúrgicas de alineación e implante utilizados en la artroplastia total de superficie como se muestra en figura 3 [23-27]. a) b) Figura 3. Implante femoral. Vista lateral con ángulo cervicodiafisario a). Vista superior sin ángulo de anteversión b). El componente acetabular fue implantado simulando diferentes configuraciones de posición como se muestra en la figura 4, con una inclinación la cual indica el giro hacia arriba o abajo sobre el eje sagital de 40º, 45º y 50º y para la anteversión en el cual gira hacia adelante o atrás sobre el eje vertical de -15º, -10º, -5º, 0º, 5º, 10º y 15º para evaluar la influencia de las diferentes posiciones en el rango de movimiento. Estas 18 combinaciones Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO de posición del componente acetabular fueron analizadas para el máximo rango de movimiento hasta alcanzar el punto de pinzamiento de la articulación. Eje vertical Inclinación Inclinación Eje transverso Anteversión - Anteversión + Eje sagital Anteversión en las figura 6 y 7, donde las posiciones examinadas para el rango de movimiento propuestos en este estudio son máxima flexión, máxima abducción, máxima rotación interna a 90º de flexión y máxima rotación externa a 90º de flexión [29,30]. El análisis cinemático fue hecho realizando las maniobras de movimiento hasta alcanzar el punto máximo de movilidad y llegar al pinzamiento. El movimiento de flexión parte de la posición neutral y fue llevado hasta el pinzamiento. El movimiento de abducción parte de la posición neutral y fue llevado al punto de pinzamiento máximo. Los movimientos de rotación interna y rotación externa partieron de la posición inicial de flexión a 90º. a) b) Figura 4. Orientación de componente acetabular a), implante acetabular en pelvis b). Para definir la orientación de la posición neutral de la cadera fue utilizado el sistema coordenado cartesiano como se muestra en la figura 5. La pelvis esta orientada en el plano pélvico anterior definido por la espina iliaca anterosuperior (EIAS) y la parte central del tubérculo púbico (TP). El sistema de coordenadas del componente femoral es el eje paralelo al plano pélvico que intersecta el centro de rotación de la cabeza femoral (CF) y el centro de la rodilla (CR), conocido como plano frontal [27,28]. EIAS TP CF Rotación externa Figura 6. Movimientos de la cadera. Eje vertical Plano sagital (flexión-extensión) EIAS CF Abducción Flexión Eje transverso TP Plano frontal (abducción-aducción) Plano transverso (rotación) Eje sagital Figura 7. Planos anatómicos y ejes de referencia. CR CR Figura 5. Vista anterior y lateral del modelo CAD de la articulación de la cadera. 2.3 Simulación cinemática Los movimientos que se generan en la cadera y los planos en los que se generan son mostrados ISBN: 978-607-95309-3-8 El sistema sobre el cual se realizó el rango de movimiento fija el punto de origen en el centro de rotación geométrico de la cabeza femoral. Partiendo de la posición neutral flexión 0º, abducción 0º y rotación 0º, se realizaron las maniobras de movimiento hasta alcanzar el pinzamiento entre el componente acetabular y el cuello femoral. La simulación de movimiento del fémur utilizó el sistema de detección de colisiones del software para analizar el rango de movimiento con respecto al sistema coordenado anatómico. Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO RESULTADOS El rango de movimiento de la flexión a 0º de abducción y 0º de rotación para todas las combinaciones de posición de los componentes protésicos son mostrados en la tabla 1. Los resultados muestran que la inclinación de la copa acetabular orientada a 50º obtuvo un mayor rango de movilidad en comparación con las inclinaciones de 45º y 40º. Para la anteversión del componente acetabular el menor rango de movimiento fue para -15º y se incrementó el rango de movimiento conforme se aumentó la anteversión. El menor rango de movimiento para flexión pura fue de 70.25º con el componente acetabular a una inclinación de 40º y una anteversión de -15º y el máximo rango de movimiento de flexión pura fue de 107.92º con una posición del componente acetabular de 50º de inclinación y 15º de anteversión. Éstos resultados muestran la variación del rango de movimiento en función de la posición en la que es alineado el implante protésico para el caso de un diseño convencional con ángulo α=0º. El mismo mecanismo de análisis fue realizado en el diseño del componente acetabular β=45º. El rango de movimiento de flexión pura más bajo fue de 84.64º en la posición acetabular de -15º de inclinación y el rango de mayor flexión fue de 120.95º en 15º de inclinación y 50º de anteversión. a) b) Figura 8. Vista lateral del modelo de la articulación de la cadera con componente acetabular estándar α=0º en posición neutral a) y flexión pura al pinzamiento b). a) b) Figura 9. Vista anterolateral del modelo de la articulación de la cadera con componente acetabular estándar α=0º en posición neutral a) y flexión pura al pinzamiento b). ISBN: 978-607-95309-3-8 Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO a) b) Figura 10. Vista lateral del modelo de la articulación de la cadera con nuevo diseño del componente acetabular β=45º en posición neutral a) y flexión pura al pinzamiento b). a) b) Figura 11. Vista anterolateral del modelo de la articulación de la cadera con nuevo diseño del componente acetabular β=45º en posición neutral a) y flexión pura al pinzamiento b). Para ilustrar el análisis de simulación para flexión en las figuras 8 y 9 se muestran las vistas lateral y anterolateral de las simulaciones con el implante acetabular convencional α=0º orientado a 45º de inclinación y 0º de anteversión partiendo de la posición neutral a 0º a), hasta alcanzar el pinzamiento entre el cuello femoral y el componente acetabular indicado en el círculo a 87.8º b). En las figuras 10 y 11 se muestran las vistas lateral y anterolateral de las simulaciones de flexión con el nuevo diseño de implante acetabular β=45º orientado en la misma posición del caso anterior partiendo de la posición neutral a 0º a), hasta alcanzar el pinzamiento entre el cuello femoral y el componente acetabular indicado en el círculo a 99.5º b). ISBN: 978-607-95309-3-8 En la tabla 2 se muestra el movimiento de abducción con 0º de flexión y 0º de abducción partiendo de la posición neutral. Para el diseño convencional del componente acetabular el menor rango de movimiento se obtuvo a -15º de inclinación y 45º de anteversión con 40.9º y el máximo rango de movimiento fue a 50º de inclinación y 15º de anteversión con 59.4º. El mínimo rango de abducción para el diseño de corte β=45º fue con la posición de -15 de inclinación y 40º de anteversión con 52.1º y el máximo rango de movimiento fue para 50º de anteversión con 61.2º. En estas últimas posiciones del componente acetabular el pinzamiento fue producido por el contacto del cuello femoral con la parte superior de la cavidad cotiliodea de la pelvis. Los valores que están marcados con paréntesis para la posición Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO Tabla 1. Máxima flexión a 0º de abducción y 0º de rotación diseño del componente acetabular. Inclinación 40º 45º Anteversión α=0º β=45º α =0º -15º 70.2º 84.6º 72.0º -10º 74.9º 89.3º 77.6º -5º 79.2º 93.6º 82.6º 0º 83.8º 98.0º 87.8º 5º 87.8º 102.1º 93.0º 10º 91.6º 105.6º 97.1º 15º 94.8º 109.1º 101.0º Tabla 2. Máxima abducción a 0º de flexión y 0º de rotación diseño del componente acetabular. Inclinación 40º 45º Anteversión α=0º β=45º α =0º -15º 40.9º 52.1º 45.6º -10º 42.7º 53.4º 47.9º -5º 44.5º 54.5º 49.7º 0º 46.2º 55.1º 51.4º 5º 47.2º 55.2º 52.9º 10º 48.7º 54.8º 53.9º 15º 49.5º 54.2º 54.7º para las combinaciones de posición y de 50º β =45º 82.9º 88.6º 94.2º 99.5º 104.1º 108.2º 111.7º α =0º 73.6º 80.3º 86.5º 92.8º 98.5º 103.4º 107.9º β =45º 86.6º 92.9º 99.2º 105.6º 111.2º 116.3º 120.9º para las combinaciones de posición y de 50º β =45º 52.9º 54.9º 56.7º 58.5º 60.0º 60.6º 60.2º α =0º 50.2º 52.6º 54.6º 56.4º 57.9º 59.1º 59.4º β =45º 60.9º 61.2º(63.1º) 61.2º(64.3º) 61.2º(64.8º) 61.2º(65.3º) 61.2º(65.1º) 61.2º(64.8º) Tabla 3. Máxima rotación interna a 90º de flexión para las combinaciones de posición y de diseño del componente acetabular. Inclinación 40º 45º 50º Anteversión α=0º β=45º α =0º β =45º α =0º β =45º -15º -------10º -----5.2º -5º -4.7º -4.2º -12.5º 0º -9.8º -8.4º 2.0º 12.9º(19.0º) 5º -12.9º(13.5º) 2.8º 12.9º(13.7º) 8.2º 12.9º(24.3º) 10º 1.9º 12.9º(15.9º) 7.6º 12.9º(16.9º) 12.9º(13.5º) 12.9º(26.6º) 15º 5.6º 12.9º(17.0º) 11.1º 12.9º(19.0º) 12.9º(16.9º) 12.9º(28.4º) Tabla 4. Máxima rotación externa a 90º de flexión para las combinaciones de posición y de diseño del componente acetabular. Inclinación 40º 45º 50º Anteversión α=0º β=45º α =0º Β =45º α =0º β =45º -15º 54.3º 68.9º -58.3º -57.1º -10º 57.7º 72.3º 51.5º 61.2º 45.8º 59.7º -5º 60.7º 75.8º 55.0º 62.5º 49.8º 64.8º 0º 64.1º 79.4º 58.9º 68.8º 54.4º 68.8º 5º 67.9º 83.3º 63.0º 73.3º 58.0º 73.8º 10º 71.9º 87.8º 67.6º 77.5º 63.8º 80.2º 15º 76.7º 92.8º 72.9º 84.1º 69.0º 85.0º de 50º de anteversión corresponden a los valores acetabular y el cuello femoral. El máximo rango teóricos del rango de movimiento hasta de movimiento de abducción fue de 12.9º antes producirse el pinzamiento del cuello del fémur de llegar al pinzamiento hueso con hueso. Los con el componente protésico acetabular. valores teóricos de pinzamiento del hueso femoral y el componente acetabular fueron marcados con paréntesis. Una forma de medir el rango de movimiento para rotación interna es hacerla en posición La simulación de máxima rotación externa inicial de flexión pura a 90º [21]. Los valores marcados con líneas punteadas mostrados en la partiendo de la posición inicial de flexión pura a tabla 3 indican que la posición inicial de flexión 90º indica en la tabla 4 que el máximo rango de no puede ser alcanzada debido al pinzamiento movimiento se logra con una posición del provocado por el componente protésico componente protésico acetabular con una ISBN: 978-607-95309-3-8 Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO RE 5 NEU 0 CA 15 CA 0 CA -15 RI 5 AB 5 0 a) 20 40 60 80 100 120 Máxima flexión (grados) RE 5 NEU 0 CA 15 CA 0 CA -15 RI 5 AB 5 0 20 b) 40 60 80 100 120 Máxima flexión (grados) Gráfica 1. Valores para el diseño acetabular α=0º convencional a), valores para diseño con corte β=45º b). inclinación 40º y con anteversión de 15º obteniendo 76.7º y 92.8º para el diseño acetabular convencional y con diseño de corte respectivamente. El menor rango de movilidad se obtuvo para una inclinación 50º y una anteversión de -10º y -15º con valores de 45.8º y 57.1º para los diseños de las copas. En la gráfica 1 se realizó la simulación con una combinación de movimientos partiendo de la posición neutral 0º para la flexión máxima con 5º grados de rotación interna, 5º de rotación externa y flexión pura para los diseños de componente protésico acetabular. El rango de movimiento alcanzado para el movimiento de flexión partiendo de la posición inicial de rotación externa a 5º (RE), posición neutral 0º de rotación (NEU), rotación interna a 5º (RI) y abducción a 5º (AB), para las posiciones del componente acetabular con anteversión (CA) de -15º, 0º y 15º de anteversión y 45º de inclinación. Se puede observar como se incrementa el rango de movilidad inherente al tipo de movimiento con respecto a la posición del componente acetabular. El rango de movimiento de flexión se aumenta combinado con movimientos de abducción y rotación interna y externa. Los rangos de movimiento se muestran en a) para el diseño convencional comparados con los ISBN: 978-607-95309-3-8 valores obtenidos para el diseño de corte del componente acetabular en b). CONCLUSIONES El rango de movimiento está influenciado directamente por la posición en la que el componente acetabular es implantado. La posición y el tamaño de los componentes protésicos de la cadera son analizados preoperatoriamente por el cirujano por medio de una radiografía estándar anteroposterior con la cadera en 10º de rotación interna, de esta forma es analizada la posición anatómica correspondiente para cada paciente [22-26,31], asegurando una orientación adecuada de los implantes, sin embargo, el rango de movimiento de la prótesis de cadera de superficie es inferior al rango de movimiento logrado por una cadera normal, por lo que se evaluó el diseño del componente acetabular para determinar el rango de movimiento en una prótesis de superficie. En la tabla 5 se muestra una comparación de los resultados obtenidos en diferentes estudios para el rango de movilidad de la cadera. Se observa que en todos los casos que el movimiento de flexión en caderas intervenidas con implantes protésicos es inferior que el movimiento de la Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO Tabla 5. Estudios del rango de movimiento de la cadera. Autor Kluess Howie Newman Lavigne Williams Stulberg Robinson Burroughs Kubiak CN ATR ATC ND PR Tipo de articulación ATR ATR ATC ATR ATR ATR ATR ATC ATC CN Tamaño implante mm 48 PR Orientación acetabular PR 46 44 PR 28 44 PR PR ND 30º,+25º PR 45º,+20º ND PR 45º, +15º PR Flexión 78º 95º 100º 94±12º 90º 108º 104º 132º 107º 122±16º Tipos de movimientos Abducción RI a 90º de flexión ND 14º 70º ND 50º 25±8º ND 40º ND 60º ND 45º ND ND 28º ND 24º 63±10º 35±6º RE a 90º de flexión ND ND ND ND ND ND ND ND 102±14º Cadera normal Artroplastia total de resuperficialización Artroplastia total de cadera convencional No hay datos disponibles Promedio cadera normal. El máximo valor de flexión para el diseño acetabular convencional en este estudio fue de 107.9º, el cual es comparable con los rangos obtenidos por Williams et al., y por Stulberg et al. Para el nuevo diseño propuesto el movimiento de flexión alcanzó 120.9º el cual es comparable con el rango de movimiento de una cadera normal reportado por Kubiak et al. El nuevo diseño de componente acetabular muestra un notable incremento en el movimiento de la cadera en flexión pura en 12.86±1.5º y en rotación externa en 13.4±1.8º comparados con el diseño convencional en este estudio. Los movimientos de abducción y rotación interna no mostraron un incremento sustancial debido a que se presento el pinzamiento de huesos impidiendo el incremento del rango de movilidad generado por el nuevo diseño. No obstante que el adecuado alineamiento así como la selección en el tamaño de los implantes protésicos los cuales dependen de la orientación natural de la pelvis y el tamaño natural de cadera y que son elegidos preoperatoriamente por el cirujano, son determinantes para el rango de movilidad, sin embargo, el nuevo diseño del implante acetabular influye en los resultados de movilidad de la cadera. REFERENCIAS [1]Bryan D. Springer, Sarah E. Connelly, Susan M. Odum, et al. “Cementless Femoral Components in Young Patients. Review and Meta-Analysis of Total Hip Arthroplasty and Hip Resurfacing” J Arthroplasty 24, 6 Suppl. 1 2009. [2] Peter Grigoris, Paul Roberts, Kostantinos Panousis, et al. “The Evolution of Hip ISBN: 978-607-95309-3-8 Resurfacing Arthroplasty”. Orthop Clin N Am 36: 125-134, 2005. [3] Anastasios K. Lilikakis, Sarah L. Vowler, Richard N. Villar, “Hydroxyapatite-Coated Femoral Implant in Metal-on-Metal Resurfacing Hip Arthroplasty: Minimum of Two Years Follow-Up”. Orthop Clin N Am 36: 215-222, 2005. [4] Paul E. Beaulé, Michel Le Duff, Pat Campbell, et al. “Metal-on-Metal Surface Arthroplasty With a Cemented Femoral Component. A 7–10 Year Follow-Up Study” . J Arthroplasty 19,8 Suppl. 3: 17-22, 2004. [5] Wolf-Christoph Witzleb, Uwe Hanisch, Joerg Ziegler, et al. “In Vivo Wear Rate of the Birmingham Hip Resurfacing Arthroplasty. A Review of 10 Retrieved Components”. J Arthroplasty 24,6: 951-956, 2009. [6] M.A.L. Hernández Rodríguez, R.D. Mercado Solís, A. J. Pérez Unzueta, et al. “Wear of Cast Metal-Metal Pair for Total Replacement Hip Protheses”. Wear. 259: 958963, 2005. [7] J. Diabb, A. Juárez-Hernandez, R. Colas, A.G. Castillo, E. García-Sanchez and M.A.L. Hernandez-Rodriguez, “Boron Influence on Wear Resistance in Nickel Base Alloys” Wear of Materials. ISSN:0043-1648, 267: 550-555, 2009. [8] A. Juarez Hernandez and H. Jones, “Effect of Increased Growth Velocity on Growth Temperature of the Al-Al2Cu Eutectic” Met. Materials Transaction A, ISSN:1073-5623, 31A: 327-328, 2000. [9] J. Diabb, A. Juárez Hernández, A. Reyes, et al, “Failure Analysis for Degradation for a Polietilene Knee Prosthesis Component” Engineering Failure Analysis,1770-1773, 2009. [10] Ian C. Clarke, Thomas Donaldson, John G. Bowsher, et al. “Current Concepts of Metal-on- Derechos Reservados © 2010, SOMIM MEMORIAS DEL XVI CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 22 al 24 DE SEPTIEMBRE, 2010 MONTERREY, NUEVO LEÓN, MÉXICO Metal Hip Resurfacing”. Orthop Clin N Am 36, 143-162, 2005. [11] Paul Roberts, Peter Grigoris, Hendrik Bosch, et al. “Hip Replacement (iii) Resurfacing arthroplasty of the hip”. Curr Orthop 19, 263279, 2005. [12] Thorsten M. Seyler, German A.Marulanda, Michael A. Mont, et al. “Limited Approach Surface Replacement Total Hip Arthroplasty”. Oper Tech Orthop 16:120-125, 2006. [13] S.J. Eastaugh-Waring, S. Seenath, D. S. Learmonth, et al. “The Practical Limitations of Resurfacing Hip Arthroplasty”. J Arthroplasty, 21,1: 18-22, 2006. [14] Martin L. Buergi, and William L. Walter, “Hip Resurfacing Arthroplasty. The Australian Experience”. J Arthroplasty 22,7 Suppl. 3: 6165, 2007. [15] A.J. Shimmin, J. Bare,D.L. Back, “Complications Associated with Hip Resurfacing Arthroplasty”. Orthop Clin N Am 36: 187–193, 2005. [16] A.Ebied, and S.Journeaux, “Hip Replacement (iv) Metal-on-metal hip resurfacing”. Curr Orthop 16: 420-425, 2002. [17] Paul E. Beaule´, “A Soft Tissue-Sparing Approach to Susrface Arthroplasty of the Hip” Oper Tech Ortho, 14,2: 75-84, 2004. [18] Dan Williams, Matt Royle, Mark Norton, “Metal-on-Metal Hip Resurfacing. The Effect of Cup Position and Component Size on Range of Motion to Impingement”. J Arthroplasty 24,1: 144-151, 2009. [19] Bernard N. Stulberg, Stephanie M. Fitts, Ashlea R. Bowen, et al. “Early Return to Function After Hip Resurfacing. Is It Better Than Contemporary Total Hip Arthroplasty?”. J Arthroplasty, 2009. [20] Harlan C. Amstutz, MichelJ. LeDuff, “Current Status of Hemi-Resurfacing Arthroplasty for Osteonecrosis of the Hip: A 27Year Experience”. Orthop Clin N Am 40: 275282, 2009. [21] Mario J. Quesada, David R. Marker, Michael A. Mont, “Metal-on-Metal Hip Resurfacing Advantages and Disadvantages”. J Arthroplasty 23,7 Suppl. 1: 69-73, 2008. [22] Jose R. E. Resubal, David A.F. Morgan, “Computer-Assisted Vs Conventional Mechanical Jig Technique in Hip Resurfacing Arthroplasty”. J Arthroplasty 24,3: 341-350, 2009. [23] Sean E. Nork, Michael Schar, Gilles Pfander, et al. “Anatomic Considerations for the Choice of Surgical Approach for Hip Resurfacing Arthroplasty”. Orthop Clin N Am 36: 163-170, 2005. [24] I.A.J. Radcliffe, M. Taylor, “Investigation into the effect of varus–valgus orientation on load transfer in the resurfaced femoral head: A ISBN: 978-607-95309-3-8 multi-femur finite element analysis”. Clin Biomech 22: 780-786, 2007. [25] Kevin L. Ong, Judd S. S. M. Kurtz, Richard E. Field, et al. “Role of Surgical Position on Interface Stress and Initial Bone Remodeling Stimulus around Hip Resurfacing Arthroplasty” J Arthroplasty 24,7: 1137-1142, 2009. [26] Sanjay Gupta, Andrew M.R., Mark Taylor, “Bone remodelling inside a cemented resurfaced femoral head”. Clin Biomech, 21: 594–602, 2006. [27] Daniel Kluess, Carmen Zietz, Tobias Lindner, et al, “Limited range of motion of hip resurfacing arthroplasty due to unfavorable ratio of prosthetic head size and femoral neck diameter”. Acta Orthop 79, 6: 748-754, 2008. [28] M. Kubiak Langer, Moritz Tannast, S. B. Murphy, et al. “Range of Motion in Anterior Femoro-Acetabular Impingement”. Clin Orthop Relat Res 458: 117-124, 2007. [29] R. P. Robinson, P. T. Simonian, I. M. Gradisar, et al. “Joint Motion and Surface Contact Area Related to Component Position in Total Hip Arthroplasty”. J Bone Joint Surg [Br], 79-B:140-146, 1997. [30] R. L. Gajdosik, R. W. Bohannon, “Clinical Measurement of Range of Motion, Review of Goniometry Emphasizing Reliability and Validity”. Phys Therapy 67, 12: 1867-1872, 1987. [31] Koen A. De Smet, “Belgium Experience with Metal-on-Metal Surface Arthroplasty” Orthop Clin N Am 36: 203-213, 2005. [32] Donald W. Howie, Margaret A. McGee,Kerry Costi, et al. “Metal-on-Metal Resurfacing Versus Total Hip Replacement— the Value of a Randomized Clinical Trial” Orthop Clin N Am 36: 195-201, 2005. [33] Meredith A. Newman, Karen L. Barker, Hemant Pandit, et al. “Outcomes After Metalon-Metal Hip Resurfacing: Could We Achieve Better Function?” Arch Phys Med Rehabil 89, April: 660-666, 2008. [34] Martin Lavigne, Krishna R. Boddu Siva Rama, Alain Roy, et al. “Case Report. Painful Impingement of the Hip Joint After Total Hip Resurfacing: A Report of Two Cases” J Arthroplasty 23,7: 1074-1079, 2008. [35] Brian R. Burroughs, Brian Hallstrom, Gregory J. Golladay, et al. “ Range of Motion and Stability in Total Hip Arthroplasty With 28, 32, 38, and 44 mm Femoral Head Sizes” J Arthroplasty, 20,1: 11-19, 2005. Derechos Reservados © 2010, SOMIM