29/11/2011
Anuncio

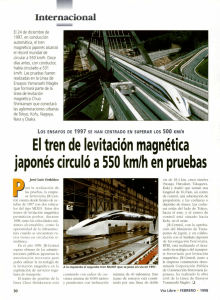
EXAMEN DE CONTROL AUTOMÁTICO PRIMER PARCIAL NOVIEMBRE 29 DE 2011 PRIMER TEMA: 35 puntos El diagrama representa un tren de alta velocidad con sistema de levitación magnética. La fuerza de levitación FL (N) es controlada por la corriente en las bobina de levitación (i) (Amp). Z (mtr) es la distancia de levitación. F es el peso del tren y Fw (señal de perturbación) el cambio de peso producido por los pasajeros que entran o salen. i2 FL k 2 z a. b. c. d. ; F mg ; Fw (5 p.) Linalice la ecuación de la fuerza de levitación para un punto de operación cualesquiera. (15 p.) Obtenga el Diagrama Funcional del sistema. Tome en consideración el circuito RL de las bobinas de levitación y el sensor de “z” es un sistema de primer orden con ganancia de Ks y constante de tiempo s , el controlador del sistema es Proporcional “P”. (10 p.) Obtenga el diagrama de bloque en lazo cerrado en el dominio de la frecuencia compleja “s”. (5 p.) Encuentre la Función de Transferencia: Z(s)/Zref(s). SEGUNDO TEMA: 35 puntos Para el sistema mostrado en la figura: a. b. c. d. (15 p.) Bosqueje con todos los detalles posibles el Lugar Geométrico de las Raíces cuando: 0 < a < inf. (10 p.) Determine el valor de “a” de tal manera que el Coeficiente de Amortiguamiento de los polos dominantes sea: ζ = 0.5. (sugerencia: usar método de comparación de coeficientes) (5 p.) Para el valor de “a” obtenido en b. obtenga el valor de los polos de lazo cerrado del sistema. ¿Existe dominancia de Segundo orden? Justifique su respuesta. (5 p.) Proporcione la información sobre la estabilidad del sistema. TERCER TEMA: 30 puntos Para el sistema mostrado en la figura: a. (18 p.) Determine los valores de los parámetros de Ka y Kg para conseguir que el Error de Estado Estacionario para una entrada Rampa Unitaria sea igual a 0.1 y que la Relación de Amortiguación del sistema sea igual a 0.5. b. (12 p.) Encuentre las Constantes de Error de Posición, Velocidad y Aceleración. Encuentre el Error de Estado Estacionario para una entrada tipo Parabólica (de aceleración). SOLUCION: Primer Tema. Linalice la ecuación de la fuerza de levitación para un punto de operación cualesquiera i2 FL k 2 ; F mg ; Fw z Punto _ Operación _( P ) : FLO FL FLO FL i P ; IO ; ZO FL F (i I O ) L ( z Z O ) i P z P 2kI FL 2O C1 ; ZO z P 2kI O2 3 C2 ZO FL FLO C1 (i I O ) C2 ( z Z O ) FL C1i C2 z Obtenga el Diagrama Funcional del sistema. Tome en consideración el circuito RL de las bobinas de levitación y el sensor de “z” es un sistema de primer orden con ganancia de Ks y constante de tiempo s , el controlador del sistema es Proporcional “P”. F ma FL F Fw ma m dv d 2z m 2 dt dt Bobina _ levitación : vL RL i LL di dt ; L di i K L vL dt ; L LL RL ; KL 1 RL Sensor _ levitación : dz s z K s vs dt Controlador _ Pr oporcional : vL P ea Obtenga el diagrama de bloque en lazo cerrado en el dominio de la frecuencia compleja “s”. Encuentre la Función de Transferencia: Z(s)/Zref(s). Segundo tema. a. sa 10 ; Gp ( s ) s 8 s ( s 1) E.C.: 1 Gc( s )Gp ( s ) 0 1 K F ( s ) 0 ; 0 K 10( s a ) 10 1 0 1 a 3 0 ; 0a s ( s 1)( s 8) s 9 s 2 18s 10 1 a 0 s ( s 3)( s 6) Punto _ salida : s j ; 0 s Gc( s ) da 3 2 18 18 0 ; 3 0 10 d 10 1.27 3 2 18 18 0 1,2 e 1.27 4.73 a 3 9 2 18 b. Por _ comparación _ de _ coeficientes : E.C.: s 3 9 s 2 18s 10a 0 Sistema _ de _ tercer _ orden : ( s r )( s 2 2n s n2 ) 0 ; 0.5 s 3 9 s 2 18s 10a 0 3 2 2 2 s (r n ) s (rn n ) s rn 0 9 r n r7 1. 2 2. 18 r ( r ) 9 n 2 n n n n n 2 3. 10a rn a 2.8 c. Polos _ de _ lazo _ cerrado : ( s r )( s 2 2n s n2 ) 0 ; 0.5 ; n 2 ; r 7 p1 7 ( s 7)( s 2 2 s 4) 0 p2 1 j1.73 p 1 j1.73 3 El _ sistema _ es _ do min ante _ de _ segundo _ orden. D 7 ; d 1 D 5 d d. Análisis _ de _ la _ estabilidad : Sistema _ condicionalmente _ estable Rango _ de _ estabilidad : 0 a acrit E.C.: s 3 9s 2 18s 10a 0 Segun _ Hurtwitz : s3 s2 s1 s0 1 18 9 10a A 10a 162 10a 0 a 16.2 acrit 9 Ecuación _ auxiliar : 9s 2 10a 0 ; s j 18 o j 4.24 A Tercer tema. a. 1 ; ess 0.1 ; 0.5 s2 ess lim sE ( s ) ; E ( s) R( s) C ( s) E ( s) (1 T ( s)) R( s) R( s) s 0 C (s) T ( s) R( s) ess lim s (1 s 0 ess 1 10 K g 10 K a 10 K a 10 K a 10 K a s ( s 1) 2 10 K g 10 K a s ( s 1) 10 K g s 10 K a s (1 10 K g ) s 10 K a 1 ( s 1) s( s 1) s ( s 1 10 K g ) 10 K a 1 ) 2 lim s 2 s 0 s (1 10 K g ) s 10 K a s s (1 10 K g ) s 10 K a 2 0.1 1 10 K g K a Por _ comparación _ con _ un _ sistema _ de _ segundo _ grado : E.C. s 2 (1 10 K g ) s 10 K a 0 2 2 s 2n s n 0 ; 0.5 1. 1 10 K g 2n n 1 10 K g K a 10 K a n2 K a 10 2. Kg Ka 1 0.9 10 b. GH ( s ) 10 K a ; Sistema _ Tipo _1 s ( s 1 10 K g ) K p lim GH ( s ) s 0 K v lim sGH ( s ) s 0 10 K a 1 10 K g K a lim s 2GH ( s ) 0 s 0 Señal _ de _ prueba _ Parabólica _ Unitaria : R ( s ) s ( s 1 10 K g ) ess lim s 2 s 0 s (1 10 K ) s 10 K g a 1 3 s 1 s3 1 2 s