Control of an Inverter for Photovoltaic Arrays, Using an Estimator of
Anuncio

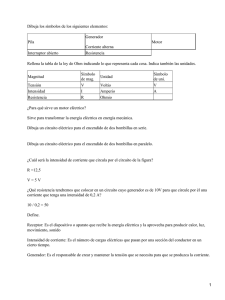
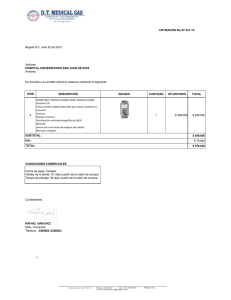
3294 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 10, OCTOBER 2015 Control of an Inverter for Photovoltaic Arrays, Using an Estimator of Short Circuit Current for Maximum Power Point Tracking N. L. Díaz, C. L. Trujillo and J. A. Hernández Abstract— Grid connected photovoltaic systems require the use of solid state converters that allow an efficient matching between the photovoltaic generator and the utility grid. Therefore, adequate control techniques, which ensure that the PV generator operates at its point of maximum energy generation under different environmental conditions, are required. This paper presents the design and implementation of a single-phase grid-connected photovoltaic system. Simulation models of the primary generator and power converters were obtained. Additionally, two methodologies for maximum power point tracking by using a new method for estimating short-circuit current are proposed. The proposed method weights the control action at different solar irradiance conditions. In order to verify the behavior of the system, simulation and experimental results are presented. Finally, the conclusions are presented. Keywords— Fuzzy System, Maximum Power Point Tracking, Photovoltaic System, PV-Inverter. E I. INTRODUCCION XISTE un interés a nivel mundial en el uso y desarrollo de fuentes alternativas de energía, que permitan dar soporte a los crecientes requerimientos energéticos, con menores efectos ambientales. La energía solar fotovoltaica (FV) es una de las opciones energéticas de amplio crecimiento debido a su abundancia, disponibilidad y su impacto positivo sobre el ambiente [1]. Los sistemas de generación de energía FV tienen dos grandes retos: 1) la baja eficiencia de conversión energética (cercana al 21% en dispositivos comerciales [2]) y 2) la energía generada depende de las condiciones ambientales especialmente de la radiación solar [3], [4]. Por lo tanto, se requieren sistemas de conversión eficientes, con estrategias de control adecuadas que permitan la obtención de la máxima energía generable ante diferentes condiciones de radiación solar. Dichas estrategias se conocen como algoritmos para el seguimiento del punto de máxima potencia (SPMP) o (MPPT) por sus siglas en inglés. La energía solar FV es aprovechada en dos formas: 1) en sistemas autónomos en donde la energía es almacenada para asegurar autonomía energética a una carga y 2) en sistemas conectados a red, en los cuales la energía FV N. L. Díaz, Facultad de Ingeniería, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia, nelson.diaza@gmail.com. C. L. Trujillo, Facultad de Ingeniería, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia, cltrujillo@udistrital.edu.co. J. A. Hernández, Facultad de Ingeniería, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia, jahernandezm@udistrital.edu.co. Figura 1. Esquema de un sistema fotovoltaico interconectado. se envía directamente a la red eléctrica [1]. En sistemas conectados a red como el que se muestra en la Fig. 1, se requiere el uso de convertidores estáticos dc/ac que transformen la energía eléctrica de corriente continua a alterna (Inversores) [5]. La operación del inversor debe asegurar la máxima transferencia de energía posible entre el generador FV y la red ac, por lo tanto el control del inversor se encuentra directamente relacionado al SPMP. En este documento se presenta el diseño, simulación e implementación de un convertidor estáticos para un sistema FV conectado a red. Primero, se presenta la obtención de un modelo del generador FV con fines de simulación que permite evaluar su comportamiento ante diferentes condiciones ambientales. Segundo, se presenta el diseño de un convertidor monofásico de dos etapas para la interconexión del generador FV a la red ac. Tercero, se explica el problema del SPMP y se describen las principales técnicas utilizadas para este propósito. Cuarto, Se proponen dos estrategias de control novedosas para el SPMP que aseguran la operación del generador FV en el punto de máxima potencia. Los métodos propuestos son validados mediante simulación. Adicionalmente, se presentan resultados experimentales del sistema fotovoltaico implementado. Es de resaltar que el SPMP propuesto se basa en el método de corriente de corto circuito, para el cual se utilizan técnicas de identificación difusas que permiten superar las principales desventajas de este método. Finalmente, el documento presenta las principales conclusiones. II. MODELADO Y DISEÑO DEL SISTEMA FOTOVOLTAICO INTERCONECTADO En un sistema fotovoltaico típico como el de la Fig. 1, se pueden distinguir cuatro bloques, los cuales se describen a continuación. TRUJILLO RODRIGUEZ et al.: CONTROL OF AN INVERTER 3295 Figura 2. Circuito equivalente del generador fotovoltaico. A. Generador Fotovoltaico. El generador FV se compone de un arreglo de paneles solares conectados en serie y/o paralelo de acuerdo a los niveles de tensión y potencia requeridos [5]. En particular, el generador fotovoltaico propuesto para esta aplicación como se compone dos paneles ASE − 300 − DGF /17 cada uno con potencia nominal de 300W, determinadas ante condiciones de radiación estándar (1000 W/m2 a 25o C). Adicionalmente, una configuración de paneles en serie ha sido seleccionada, ya que con esta configuración es posible obtener una tensión de operación mayor a la salida del generador y una menor corriente en comparación con un arreglo en paralelo, lo cual disminuye las pérdidas por conducción y facilita el acople del generador a los niveles de tensión de la red. La Fig. 2 presenta el modelo básico de un generador FV [5], [6]. El circuito de la Fig. 2 se compone por una fuente de corriente IPH la cual representa la corriente generada por efecto fotoeléctrico, un diodo, una resistencia en serie RS y una en paralelo Rsh. Las resistencias RS y Rsh son típicamente despreciadas en el modelo de simulación, esto teniendo en cuenta que RS es en general muy pequeña (la caída de tensión en RS a condiciones nominales debe ser inferior al 10% de la tensión de salida) y Rsh es muy grande (la corriente por Rsh debe ser menor al 10% de la corriente nominal). Dicha aproximación es ampliamente utilizada por muchos autores y permite simplificar el análisis manteniendo el comportamiento principal del generador FV [7], [8]. La corriente obtenida de un generador fotovoltaico se puede expresar como: I = I ph − I o (exp ( V Vt ) − 1) (1) dónde: • Vt = ɳKT/q • ɳ Es el factor de diodo (Idealmente ɳ = 1 con un valor máximo de 2) [1]; • IO: la corriente de saturación inversa del generador; • K: Constante de Boltzmann (= 1.38x10−23 N m/ oK ); • T: Temperatura del panel (oK); • q Carga del Electro´ n (= 1.6x10−19 C ); • I Corriente de salida (A). • V Voltaje de salida (V). Generalmente los parámetros ɳ e I0 no se encuentran en la hoja de especificaciones del panel solar. Sin embargo, es posible determinarlos a través de las expresiones de la corriente de corto circuito (Isc) y la tensión de circuito abierto (Voc) [9]. I sc = I ph ; (V =0, I = I sc ) (2) Figura 3. Curvas I-V obtenidas del modelo del generador FV para diferentes condiciones ambientales. I 0 = I sc exp −(Voc Vt ) ; ( I = 0, V = Voc ) (3) En la hoja de especificaciones del panel también se encuentran los datos de la potencia máxima que puede generar el panel FV bajo condiciones de radiación estándar. Dicha potencia se especifica en término de la corriente y la tensión en el punto de máxima potencia (PMP) (Ipm, Vpm). Partiendo de las ecuaciones (1) a (3) y considera qué exp (V+Rs/Vt) > 1, se obtienen las siguientes expresiones: ( ) I pm = I sc 1−exp (V pm −Voc ) Vt (4) I pm log 1− V pm Vo −1 I sc (5) 1 = Vt (( 1 ) ) Una vez se ha determinado el valor de Vt, es posible obtener el valor del parámetro (ɳ) y el valor de (I0) de la ecuación (3). El modelo de la tensión del generador FV se puede expresar como una función de la corriente generada (I) como: I V = V 1+Vt log 1− oc I sc (6) Adicionalmente, otros de los parámetros importantes, proporcionados por el fabricante en la hoja de especificaciones del panel solar, son los coeficientes de temperatura de las celdas, los cuales representan los porcentajes de variación de la potencia respecto a la temperatura, así como la variación voltaje de circuito abierto y corriente de corto circuito respecto a la temperatura (TK (PP), TK (Voc) y TK (Isc)). En la Tabla I se resumen los principales parámetros requeridos para la aplicación del modelo de generador FV. En el mismo sentido, en la Fig. 3 se presentan curvas corriente vs tensión (I-V) bajo diferentes condiciones de radiación solar y temperatura del generador FV. Las curvas se obtuvieron del modelo descrito en la ecuación (6). TABLA I. PARÁMÉTROS DEL MODELO DEL GENERADOR FV. P(MAX) (W) 600 VPM (V) 34.4 IPM (A) 17.2 VOC (V) 40 ISC (A) 19.1 TK (VOC) (%/°C) -0.38 ɳ 1.631 3296 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 10, OCTOBER 2015 Figura 4. Esquema del convertidor de dos etapas seleccionado. B. Convertidor Estático DC/AC. El convertidor estático dc/ac, tiene la tarea de acoplar el generador fotovoltaico con la red ac. Adicionalmente, el convertidor debe estar regulado por una etapa que permita la operación del generador en su PMP [5], [7], [10]. En este caso, una topología de dos etapas, como la que muestra en Fig. 4, ha sido seleccionada para la conversión dc/ac. El convertidor se compone de una etapa de conversión dc/dc (boost), una etapa de inversión compuesta por un inversor de fuente de corriente (VSI), por sus siglas en inglés, y un transformador a la frecuencia de la red ac. Esta topología fue seleccionada ya que su implementación es simple y ampliamente utilizada [6], [9], [11], [12]. El comportamiento de la topología propuesta se puede asimilar a la operación de un sistema de transmisión de alta tensión en corriente continua (HVDC). Esto teniendo en cuenta que la primera etapa se encarga de la regulación del bus de corriente continua, mientras que la segunda etapa se encarga de la regulación del flujo de potencia con la red ac tal y como sucede en un sistema HVDC. Particularmente, la topología VSI de doble puente permite un control independiente del flujo de potencia activa y reactiva entre el sistema FV y la red ac [13], [14]. En virtud de lo dicho, la segunda etapa recibirá las señales de control adecuadas para el SPMP así como para la regulación del flujo de potencia reactiva buscado un factor de potencia unitario. Una de las ventajas de la topología propuesta, es que el control de cada uno de las dos etapas se puede desarrollar de manera independiente y no se requiere la sincronización entre ellas [6], [8], [12]. 1) Convertidor boost: Se comporta como un trasformador en dc en el cual la tensión de salida se puede ajustar de acuerdo a la siguiente expresión: VDC = V 1− D (7) donde, D es el ciclo útil del convertidor (periodo de tiempo en el cual el transistor Q1 en Fig. 4 se encuentra en conducción) [15]. A medida que el ciclo útil D se acerca a su máximo valor (D = 1), es posible obtener niveles de tensión mayores. Teniendo en cuenta que la tensión a la salida del VSI debe ser elevado a los niveles de tensión de la red ac, se requeriría un ciclo útil superior a 0.8. Sin embargo, si el boost trabaja con ciclos útiles cercanos a 1, la eficiencia del convertidor decrece [15]. Por este motivo es preferible establecer el punto de operación del convertidor boost cercano a un ciclo útil de 0.5 y recurrir a un transformador a la frecuencia de la red para elevar la tensión de salida del VSI a los niveles adecuados. El diseño del convertidor se realiza bajo condiciones de operación estándar del generador es decir (V ≈ 34V). Se estableció una tensión nominal del bus dc (VDC = 70V) con el cual el convertidor opera con un ciclo útil cercano a 0.5. En la Tabla II se resumen los principales parámetros obtenidos del diseño, donde (P(nom)) es la potencia nominal de diseño, (L) y (C) corresponden a la bobina y el condensador del convertidor respectivamente y FS corresponde a la frecuencia de conmutación del convertidor para la regulación del bus dc, se diseñó un regulador lineal basado en la respuesta en frecuencia del convertidor. En el diseño se buscó un error de estado estacionario cercano a cero, y alta atenuación de las perturbaciones debidas a las variaciones en la tensión del generador FV y en la carga, por lo que se partió de un integrador y se adicionó un compensador en adelanto. Como condiciones de diseño se establecieron como valores máximo de margen de fase (ϕm > 30o) y un margen de ganancias (gm > 2dB) [16]. El diseño se realizó para una tensión de generador de 20 V y una carga de 60 W ya que para estos valores el sistema presentó la peor respuesta en frecuencia. TABLA II. COMPONENTES DEL CONVERTIDOR BOOST. P(nom) (W) 600 V (V) 34 VDC (V) 70 L (µH) 150 C (µF) 19.1 fS (kHz) 30 2) Convertidor VSI: La topología usada para el VSI, es un inversor puente completo como se muestra en la Fig. 4. Un VSI está compuesto de un puente de 4 pulsos con 4 interruptores bidireccionales. El VSI genera una tensión sinusoidal a la frecuencia de la red a la cual se va interconectar el sistema FV. La tensión sinusoidal en el VSI se genera a partir de la técnica de modulación sinusoidal de ancho de pulso (SPWM) unipolar en el cual el ciclo útil variable δ(t) está determinado por: δ (t ) = 1 1 + m sin (ωt + ϕ ) 2 2 (8) donde, (m), conocido como el índice de modulación, representa la amplitud del voltaje seno generado con respecto a la tensión del bus dc 0 < m < 1 y φ representa el ángulo de desfase con el que puede ser generada la señal sinusoidal con respecto a la tensión de la red ac [17]. Los pulsos de la señal (SPWM) varían en forma sinusoidal, por lo tanto la componente fundamental tiene una frecuencia de 60 Hz y una amplitud proporcional a la señal sinusoidal modulada. Luego del filtrado de las componentes de alta frecuencia es posible obtener una salida sinusoidal como: VC ( t ) = VDC ⋅ m sin (ωt + ϕ ) (9) TRUJILLO RODRIGUEZ et al.: CONTROL OF AN INVERTER 3297 Figura 5. Circuito simplificado del convertidor conectado a red. El convertidor de dos etapas conectado a la red ac se puede ver como un motor/generador síncrono sin inercia al considerar solamente los componentes fundamentales de la señal generada [18]. Por lo tanto, el convertidor puede controlar el flujo de potencia activa y reactiva casi instantáneamente. En la Fig. 5 se presenta un circuito simplificado el cual representa el convertidor conectado a red. En Fig. 5, (VS) es el componente fundamental de la red ac y (VC) es el componente fundamental de la tensión generada por el convertidor visto en el terminal de alta tensión del transformador. En este caso el condensador del filtro (C3 en Fig. 4) no se considera ya que este presenta una impedancia alta a la frecuencia fundamental y por lo tanto su efecto a esta frecuencia se puede despreciar. Por otro lado, (RL + jX) representa principalmente la inductancia del filtro referida al lado de alta tensión del transformador en conjunto con la inductancia de fuga del transformador y la impedancia de la red. Despreciando las pérdidas (X >> RL), el flujo de potencia activa (P) y reactiva (Q) entre el convertidor y la red ac puede ser descrito de la siguiente forma [19], [20]: P= Q= VCVS sin (ϕ ) X (10) VS (VS − VC cos (ϕ ) ) (11) X De las ecuaciones (10) y (11) se puede decir que la potencia activa se decide principalmente por el ángulo de desfase φ, mientras que la potencia reactiva depende principalmente de la magnitud de VC, la cual es controlada por el índice de modulación (m) de la señal SPWM [19], [20]. Entonces, la magnitud y dirección del flujo de potencia activa P y reactiva Q, pueden ser independientemente controladas si la amplitud y la fase de la tensión generada por convertidor son ajustados [19]. El VSI fue diseñado para condiciones de operación nominales, los principales parámetros del diseño se muestran en la Tabla III donde (N) representa la relación del transformador. TABLA III. PARÁMETROS Y COMPONENTES DEL CONVERTIDOR VSI. P(nom) (W) 600 m 0.9 VDC (V) 70 L (mH) 877 C (mF) 80.1 fS (kHz) 10 N 35/120 Por último, es necesario obtener un modelo dinámico del convertidor que permita el diseño de los controladores. Basándose en las leyes de tensión y corriente de Kirchhoff sobre el circuito de la Fig. 5, se puede obtener una ecuación que representa el comportamiento del sistema interconectado. (a) (b) Figura 6. (a) Potencia generada vs. tiempo ante una variación lineal del ángulo φ (b) Potencia activa entregada a la red ac. Entonces, considerando i(t) como la corriente de línea y teniendo en cuenta solo las componentes fundamentales de tensión y corriente es posible obtener la siguiente expresión [20], di (t ) R V (t ) Vs (t ) = − L i (t ) + C − dt L L L (12) donde, resulta evidente que la variable de estado del sistema es la corriente, lo que confirma el hecho que la función primordial del VSI es convertir la tensión dc en una corriente ac [18]. Sin embargo el modelo de la ecuación (12) no proporciona directamente información sobre el flujo de potencia. Para obtener la potencia activa y reactiva promedio en la carga, las siguientes formulas pueden ser usadas si se conocen los valores eficaces de la tensión (VS) y la corriente (IS): P = VS ∗ I S cos(θ ) (13) Q = VS ∗ I S sin(θ ) (14) donde, θ es el desfase entre la tensión de la red ac y la corriente de línea (IS) . En base a las ecuaciones (12) a (14) es posible construir un modelo no lineal que represente el comportamiento del VSI conectado a la red ac. C. Modelo de Simulación del Sistema Fotovoltaico. El modelo del sistema fotovoltaico interconectado se implementó por completo en Simulink. Este modelo contiene el generador fotovoltaico, el convertidor boost, el VSI, el transformador de baja frecuencia y la red ac tal y como se muestra en la Fig. 4. En la Fig. 6(a) se presenta una gráfica de la potencia generada vs tiempo variando el ángulo (φ) desde cero hasta (18°), iniciando la variación en 0.2 seg. En esta gráfica es posible ver como la potencia generada por el panel puede ser ajustada variando el ángulo de fase de la señal ac generada. En la Fig. 6(b) se presenta la potencia activa entregada a la red ac en ella se puede ver que tiene la misma forma que la potencia entregada por el generador fotovoltaico menos las pérdidas en el proceso de conversión. D. Seguimiento del Punto de Máxima Potencia (SPMP). Uno de los principales problemas en la operación de los paneles solares, es el desacople entre la resistencia del panel solar y la resistencia de carga. 3298 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 10, OCTOBER 2015 Figura 7. Curva Característica I-V de un panel solar. Figura 8. Curva P-V. La curva característica corriente-tensión (I−V) de un panel solar es altamente no lineal (Fig. 7). Cuando se conecta el panel solar a una determinada carga el punto de operación estará dado por la intersección de la carga con la curva (I−V). Entonces, la operación en el punto de máxima generación de energía se logra cuando la carga intercepte la curva (I−V) en dicho punto. Dicha tarea de acople entre la carga y el generador FV es realizada por el convertidor de potencia [21], [22]. La curva característica (I−V) de los paneles solares varía drásticamente ante variaciones en las condiciones ambientales, específicamente el nivel de radiación solar incidente en el panel y la temperatura de las celdas solares que lo componen (Fig. 3) [21], [22]. Un algoritmo para el SPMP busca acoplar la resistencia de la carga con la resistencia del panel solar en el punto de máxima generación. Las técnicas para el SPMP varían entre simples métodos de (Hill-Climbing) a algoritmos más complejos basados en lógica difusa y redes neuronales [23]. A continuación, se presenta una descripción de los métodos más conocidos para el seguimiento del punto de máxima potencia. 1) Algoritmo de Perturbación & Observación (HillClimbing): El algoritmo de Perturbación & Observación se basa en un proceso iterativo para alcanzar el punto de máxima potencia (PMP). El punto de operación es perturbado y la respuesta del sistema es medida para determinar la dirección de la próxima perturbación, teniendo en cuenta la variación en la potencia generada. Una de las desventajas presentes en este método es que el punto de operación presenta oscilaciones alrededor del PMP. Además, este método presenta fallas importantes ante rápidas variaciones de las condiciones atmosféricas [22]–[24]. 2) Incremento de la conductancia: Este método es una modificación al algoritmo de Perturbación & Observación y fue propuesto para responder antes cambios rápidos de las condiciones atmosféricas. La pendiente de la curva (P−V) (Fig. 8) es positiva en el lado izquierdo, negativa en el lado derecho y cero en el máximo de la curva [23]. La pendiente de la curva se puede determinar de la siguiente ecuación: dP d ( I ⋅ V ) dI = = I +V dV dV dV Igualando la pendiente dP /dV a cero se tiene (15) dP = 0; dV dI I =− dV V (16) El lado derecho de la ecuación (16) representa lo negativo de la conductancia mientras que el lado izquierdo representa la conductancia incremental. Así, comparando la conductancia I/V con el incremento de la conductancia (dI/dV) el algoritmo puede alcanzar el PMP y permanecer en él hasta que se presenten cambios en la tensión o corriente, los cuales ocurren debido a cambios en las condiciones ambientales [22]. 3) Método de Corriente de Corto Circuito: Este método se basa en que se ha encontrado una relación proporcional entre la corriente en el PMP (IPMP) y la corriente de corto circuito (Isc) bajo diferentes condiciones ambientales [23]. El valor de IPMP se encuentra cercano al 90% de (Isc) [9]. Entonces: I PMP = k ⋅ I sc (17) donde, k ≈ 0.9. El problema principal de este método radica en la medición de la corriente de corto circuito durante la operación del sistema FV. Este procedimiento aumenta la complejidad del circuito e implica perdidas de energía durante el proceso de medición de (Isc). Estas características hacen de este método uno de los menos populares a pesar de su simplicidad aparente [9]. Una vez medida la corriente de corto circuito el valor es multiplicado por la constante de proporcionalidad (k) de tal forma que este valor es puesto como referencia en un sistema de control por realimentación. III. SOLUCIÓN PROPUESTA PARA EL SEGUIMIENTO DEL PUNTO DE MÁXIMA POTENCIA Como se mencionó´ anteriormente, la primera etapa del convertidor se encarga de la regulación el bus dc. En el caso del VSI su principal función es regular el flujo de potencia, y por lo tanto ajustar la carga vista por los generadores FV buscando el SPMP. Por lo tanto, debe existir una relación entre el control de la corriente del generador FV y el control del flujo de potencia activa entre el VSI y la red ac. La expresión que describe la potencia entregada por el generador FV en función de la corriente está dada por: I P = I ⋅ V = I ⋅ Voc 1 + Vt log 1 − I sc (18) TRUJILLO RODRIGUEZ et al.: CONTROL OF AN INVERTER 3299 Remplazando las ecuaciones (20) a (22) en (19) y resolviendo la integral se obtiene: I≈ m (1 − D ) I p cos(θ ) sin(ϕ ) (23) Finalmente, remplazando (10) y (13) en (23) se tiene: I≈ Figura 9. Curva P-I para diferentes condiciones ambientales. De la ecuación (18) se pueden obtener las curvas de potencia contra corriente (P−I) bajo diferentes condiciones como se muestra en la Fig. 9. En la Fig. 9 es posible ver que la pendiente de las curvas (dP/dI) es positiva en el lado izquierdo del PMP, negativa a la derecha del PMP y cero en el PMP (dP/dI=0). Considerando estas características, es posible definir un algoritmo para el SPMP en términos de variaciones a la corriente en el generador FV de la siguiente forma: 1. SI dP/dI > 0; (izquierda del PMP), ENTONCES I debe ser incrementada. SI dP/dI = 0; PMP, ENTONCES I debe permanecer constante. SI dP /dI < 0; (derecha del PMP), ENTONCES I debe ser disminuida. 2. 3. La corriente en el bus dc Idc, se encuentra relacionada con la corriente en el lado ac iac(t) por la siguiente ecuación: I dc ≈ i T T 0 S ⋅ iac ( t ) dt (19) donde, S es una función rectangular de conmutación [20]. El componente fundamental de la función (S) se representa como: S ≈ m sin (ωt + ϕ ) (20) Por otro lado, la corriente en el lado ac iac(t) está dada por la siguiente ecuación: iac ≈ I p sin (ωt − θ ) (21) Donde, Ip representa el valor máximo de la componente fundamental de la corriente entregada a la red ac. Adicionalmente, se puede determinar la corriente (I) del generador FV en relación con la corriente en el bus dc (Idc) dada por el comportamiento del convertidor boost como: I≈ I dc (1 − D ) (22) 2m VC sin(2ϕ ) 2 X (1 − D ) (24) De (24) es posible ver que la corriente del generador fotovoltaico (I) depende del ciclo útil (D) el cual es determinado por la operación del convertidor boost, del índice de modulación (m) y del ángulo de fase (φ) de la tensión ac generada por el VSI. Al considerar una tensión del bus dc regulada, el ciclo útil D lo determina el control del convertidor boost. Por otra parte, si se supone un control independiente del flujo de potencia activa y reactiva basado en las ecuaciones (10) y (11), el valor del índice de modulación (m) lo determina el control de potencia reactiva. Entonces, la corriente dc del generador fotovoltaico (I) se puede controlar mediante el ajuste del ángulo de fase (φ), de forma similar a como se regula el flujo de potencia activa. En virtud de lo dicho, es posible derivar las reglas básicas que describen el algoritmo de SPMP en términos de la variable de control (φ) como: 1. 2. 3. SI dP/dI > 0; ENTONCES φ debe ser incrementado. SI dP/dI=0; (PMP), ENTONCES φ debe permanecer constante. SI dP /dI < 0; ENTONCES I φ debe ser disminuido. Otra de las características que se espera del sistema de SPMP es que cuando el punto de operación del panel solar se encuentre lejos del PMP el ajuste del ángulo de fase (φ) sea grande y por el contrario cuando el punto de operación se encuentre cercano al PMP el ajuste de (φ) sea lo suficientemente pequeño para reducir oscilaciones alrededor del PMP. A. Método Difuso de SPMP. El principio del control difuso es capturar e implementar el conocimiento disponible por parte de un experto. Una clase específica de este control es el control difuso basado en reglas. En este tipo de control, una acción de control sobre determinadas condiciones se describe en términos de reglas sientonces (if-then) [24]. Por lo tanto, un sistema difuso puede representar fácilmente el comportamiento cualitativo expresado anteriormente para el SPMP, incorporando incluso variaciones grandes o pequeñas de ángulo (φ) de acuerdo al punto de operación del sistema. En este sentido, un controlador difuso Mamdani de tipo proporcional derivativo fue propuesto para el SPMP [24]. El controlador fue sintonizado respecto a la curva (P−I) considerando condiciones de radiación estándar. 3300 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 10, OCTOBER 2015 (a) Figura 10. Potencia obtenida del generador ante condiciones de radiación estándar con SPMP difuso. Figura 11. Potencia obtenida del generador ante condiciones de radiación 500W/m2 a 25 °C con SPMP difuso. En la Fig. 10 se presenta la respuesta del sistema FV, en condiciones de radiación estándar, al incluir el SPMP donde se puede ver que el generador FV opera en su PMP en estado estable. Sin embargo, al evaluar el comportamiento del algoritmo de seguimiento ante una irradiación solar de (500W/m2), se obtienen grandes oscilaciones alrededor del PMP como se muestra en la Fig. 11. Estas oscilaciones ocurren debido a que la acción de control se sintonizó considerando una curva (P−I) de alta radiación. Entonces, ante condiciones de radiación baja el valor de la acción de control sobre (φ) será grande, lo que se deriva en un incremento grande en la corriente y por lo tanto oscilaciones alrededor del PMP. Por otro lado, si se realiza la sintonización del SPMP ante condiciones de baja radiación solar, con pasos de control pequeños, el efecto sería una reducción en la velocidad de respuesta del SPMP. Por lo tanto, en el método iterativo propuesto, siempre existirá un compromiso entre velocidad y precisión en el SPMP. Para eliminar las oscilaciones ante baja radiación sin sacrificar tiempo de repuesta, los pasos de la acción de control deben ajustarse de acuerdo a las condiciones de radiación solar. Es decir, ante altos niveles de radiación se requieren pasos de control grandes y ante niveles de radiación bajos se requieren pasos pequeños en la acción de control. Teniendo en cuenta la proporcionalidad que existe entre la corriente de corto circuito y la irradiación solar, es posible usar la corriente de corto circuito para ponderar la acción de control y de esta forma ajustar las variaciones de la variable de control φ de forma proporcional a los niveles de radiación. Sin embargo, la medición de la corriente de corto circuito presenta (b) (c) Figura 12. dP/dI vs Temperatura y Corriente normalizada ISC para a) 1000W/m2, b) 750W/m2 , c) 500W/m2. Figura 13. Superficies superpuestas de la Fig. 12. los mismos problemas expuestos para el método de la corriente de corto circuito [23]. El reto en este punto es encontrar una forma eficiente para determinar la corriente de corto circuito. La solución parte de las curvas (P−I) de la Fig. 9. En ellas se puede ver que el comportamiento que presenta la pendiente de las curvas (dP/dI) es similar ante todas las condiciones ambientales. Entonces, la distancia de un valor determinado de la pendiente (dP/dI), en cada curva respecto a su correspondiente PMP, es proporcional a la corriente de corto circuito. Al normalizar la corriente respecto a la corriente de corto circuito, el valor de la pendiente (dP/dI) en todas las curvas corresponderá al mismo valor de corriente normalizada (In = I/Isc). Para ser más precisos, se obtuvieron los comportamientos de las pendientes (dP/dI), en las curvas (P–I), contra temperatura (Temp) y corriente normalizada (In) para diferentes condiciones de irradiación: 1000W/m2, 750W/m2 y 500W/m2, como se muestran en la Fig. 12 (a), (b) y (c) respectivamente. Al superponer las tres superficies de la Fig. 12 se obtiene la superficie de la Fig. 13, en la que se puede ver que todas presentan comportamientos idénticos. Con base al comportamiento mostrado en la Fig. 13, de encontrarse una única función que represente la superficie sería posible estimar la corriente normalizada en función de (dP/dI) y de la temperatura (In = F ((dP/dI ), Temp)). Si además se cuenta con la medición de la corriente (I) en el generador FV, se puede estimar la corriente de corto circuito ante cualquier condición de radiación solar. En este sentido, Un modelo difuso del tipo Takagi-Sugeno (TS) puede aproximar a una función no lineal por medio de funciones lineales a trozos como se muestra en la Fig. 14 [24]. TRUJILLO RODRIGUEZ et al.: CONTROL OF AN INVERTER 3301 Figura 14. Aproximación por medio de funciones lineales a trozos. Figura 16. Seguimiento del Punto de Máxima Potencia ante incrementos y decrementos en la radiación solar. Figura 15. Esquema del estimador de corriente de corto circuito. Un modelo TS, a diferencia de un modelo Mamdani, usa como consecuente funciones clásicas en términos de las variables del antecedente. Entonces, el modelo puede ser entendido como un modelo de regresión lingüístico y matemático en el sentido en que el antecedente describe funciones difusas de entrada en las cuales las funciones del consecuente son válidas [24]. Con el modelo difuso TS se logra una aproximación del 96% de la curva, este modelo permite estimar la corriente normalizada en función de la pendiente (dP/dI) y la temperatura (Temp) bajo cualquier condición de radiación solar. Considerando que es posible medir la corriente del generador en cualquier momento, también es posible estimar la corriente de corto circuito (Ine) sin tener que desconectar el generador FV. La Fig. 15 presenta un esquema para la estimación de la corriente de corto circuito en base a la corriente del generador FV (I), la pendiente (dP/dI) y la temperatura (Temp). De esta forma, es posible utilizar el valor de la corriente de corto circuito estimada ISC e para ponderar la acción de control ante diferentes condiciones de radiación. De esta forma es posible obtener pasos de control proporcionales a los niveles de radiación solar. La Fig. 16 muestra la potencia generada y la potencia entregada a la red utilizando el SPMP difuso ponderado mediante la corriente de corto circuito estimada. El tiempo de establecimiento del sistema está cerca a los 50 ms y se asegura el seguimiento del punto de máxima potencia ante incrementos o decrementos de la radiación solar. Los fuertes decrementos en la potencia entregada que se ven en la Fig. 16, se deben a que ante decrementos en la radiación, el punto de operación del panel se encuentra a la derecha del PMP de la Fig. 9, por lo tanto, durante cortos instantes de tiempo la potencia generada es igual a cero. B. Método Mejorado de Corriente de Corto Circuito. Por otro lado, partiendo de la estimación de la corriente de corto circuito ante cualquier condición de radiación solar, es posible implementar un método de SPMP más simple usando la corriente de corto circuito (Isc) como referencia de un controlador. Para ser más claros, el método de corriente de corto circuito se basa en la relación lineal que existe entre la corriente de corto circuito y la corriente en el punto de máxima potencia de acuerdo a la ecuación (17). Figura 17. Corriente de corto circuito y corriente de máxima potencia generada IPMP. En la Fig. 17 se muestra la corriente en el punto de máxima potencia comparada con la corriente de corto circuito obtenida del método de seguimiento difuso expuesto anteriormente. De la Fig. 17 se puede ver que la corriente de máxima potencia es aproximadamente el 90% de la corriente de corto circuito. La corriente de máxima potencia estimada (IPMPe) puede ser utilizada como referencia en un sistema simple de control por realimentación. Para lograr la operación del generador FV en el punto de máxima potencia, la corriente en el generador (I) debe ser comparada con la corriente de referencia (IPMPe). La señal de error puede ser procesada por un controlador con acción integral, estableciendo un nuevo valor en la señal de control que permita hacer (I=IPMPe). Para verificar la operación de este método se diseñó un controlador de tipo proporcional integral basado en la dinámica del convertidor de dos etapas, utilizando un modelo matemático linealizado que integra las ecuaciones (12) a (14) y (24). También se diseña un controlador lineal PI para el flujo de potencia reactiva Q. El esquema básico del sistema fotovoltaico diseñado se muestra en la Fig. 18. Figura 18. Esquema del sistema FV utilizando el método de corriente de corto circuito. 3302 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 10, OCTOBER 2015 (a) (b) Figura 20. a) Esquema del convertidor con SPMP construido, b) Fotografía del prototipo del convertidor de dos etapas construido. Figura 19. Potencia generada Pdc y potencia entregada a la red ac (Pac) ante diferentes condiciones de radiación. Por su parte, en la Fig. 19 se presenta la respuesta del sistema ante incrementos y decrementos en los niveles de radiación solar (potencia generada (Pdc) y potencia entregada a la red ac (Pac )). C. Comparación de los métodos propuestos. En la Tabla IV se presentan algunos parámetros que permiten comparar el desempeño de los métodos de SPMP propuestos, entre ellos la eficiencia del método de SPMP (ɳSPMP), el tiempo de establecimiento (Tes) y el tiempo requerido para la simulación de un segundo de operación del sistema (Tsim). Dónde: η SPMP = t 0 Pgenerada ( t )dt t 0 Figura. 21 Respuesta del sistema interconectado ante cambios en la irradiación solar en un día nublado. (25) PPMP ( t )dt (Pgenerada(t)) representa la potencia generada por generador FV y (PPMP(t)) representa la potencia en el PMP el TABLA IV. COMPARACIÓN DE MÉTODOS SPMP. (ηSPMP) Método difuso Método Isc propuesto Método Isc clásico 97.2 97.2 94.2 Tes (ms) 50 140 88.3 Tsim (min) 18 18 - . De la Tabla 4 se puede ver que el método difuso resulta eficiente y rápido en el SPMP, sin embargo es computacionalmente más complejo. Por otro lado, el método (Isc) propuesto presenta una mejor eficiencia comparado al método clásico. IV. RESULTADOS EXPERIMENTALES Con el propósito de verificar experimentalmente el desempeño del sistema FV interconectado se construyó un prototipo del convertidor diseñado (Fig. 20(a)). El prototipo está compuesto de un componente hardware y un componente software sobre el que se implementó la estrategia de SPMP. El componente hardware se compone del convertidor de dos etapas y la etapa de medición de las variables ac y dc, y se muestra en la Fig. 20 (b). Figura 22. Regulación del flujo de potencia reactiva durante operación real del sistema. El método de SPMP seleccionado para la implementación, es el método de corriente de corto circuito, ya que mostró ser computacionalmente más simple. En la Fig. 21 se presentan las respuestas reales de la potencia generada por el arreglo de paneles, la potencia entregada a la red ac y la irradiación solar aproximada. En la Fig. 21 se puede ver que el sistema entrega energía a la red ac de acuerdo a los niveles de radiación, utilizando el método de SPMP seleccionado. Por su parte la Fig. 22 muestra la regulación del flujo de potencia reactiva. Los picos que se presentan en la Fig. 22 muestran que a pesar de utilizar controladores independientes para el flujo de potencia activa y reactiva, existe acople entre las dos variables, entonces, ante cambios fuertes en el flujo de potencia activa se presentarán perturbaciones en el flujo de potencia reactiva. Sin embargo, la regulación en estado estacionario es efectiva. V. CONCLUSIONES En el presente artículo se presentó el diseño e implementación de un prototipo convertidor de dos etapas el cual permite, de forma exitosa, el acople del generador TRUJILLO RODRIGUEZ et al.: CONTROL OF AN INVERTER fotovoltaico con la red ac, a fin de entregar la máxima energía disponible, con un factor de potencia cercano a la unidad. Adicionalmente, se demostró de forma teórica y experimental que existe una relación entre la ubicación de un valor determinado de la pendiente (dP /dI) , en la curva (P–I), y la corriente de corto circuito. Esta característica se utilizó para obtener un modelo que describe el comportamiento del generador fotovoltaico ante todas las condiciones de radiación solar. El modelo permite la estimación de la corriente de corto circuito en función de (dP /dI). Finalmente, se propuso un método para la estimación de la corriente de corto circuito. El método de estimación no requiere circuitería adicional ni desconexión del panel para la estimación de la corriente de corto circuito. El estimador propuesto permite eliminar las principales desventajas del método de corriente de corto circuito para el SPMP, permitiendo entregar a la red hasta un 15% más de energía en comparación con el método convencional de corriente de corto circuito, dicho método fue validado experimentalmente. 3303 [16] [17] [18] [19] [20] [21] [22] [23] [24] REFERENCIAS [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] H. Kanchev, F. Colas, V. Lazarov, and B. Francois, “Emission reduction and economical optimization of an urban microgrid operation including dispatched pv-based active generators,” IEEE Transactions on Sustainable Energy, vol. 5, pp. 1397–1405, Oct 2014. Z. Shahan, “Which solar panels are most efficient?,” February 2014. F. Marra, G. Yang, C. Traeholt, J. Ostergaard, and E. Larsen, “A decentralized storage strategy for residential feeders with photovoltaics,” IEEE Transactions on Smart Grid, vol. 5, pp. 974–981, March 2014. F. Marra and G. Yang, “Chapter 10 - decentralized energy storage in residential feeders with photovoltaics,” in Energy Storage for Smart Grids (P. D. Lu, ed.), pp. 277 – 294, Boston: Academic Press, 2015. A. Keyhani, Design of Smart Power Grid Renewable Energy Systems. Wiley, 2011. M. Molina and P. Mercado, “Modeling and control of grid-connected photovoltaic energy conversion system used as a dispersed generator,” in 2008 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America, pp. 1–8, Aug 2008. F. Edwin, W. Xiao, and V. Khadkikar, “Topology review of single phase grid-connected module integrated converters for PV applications,” in IECON 2012 - 38th Annual Conference on IEEE Industrial Electronics Society, pp. 821–827, Oct 2012. A. Luque and S. Hegedus, Handbook of photovoltaic science and engineering. Wiley, 2nd ed., 2011. N. Mutoh, M. Ohno, and T. Inoue, “A method for MPPT control while searching for parameters corresponding to weather conditions for PV generation systems,” IEEE Transactions on Industrial Electronics, vol. 53, pp. 1055–1065, June 2006. R. Zanasi and S. Cuoghi, “Power control of grid-connected photovoltaic systems,” in Industrial Electronics (ISIE), 2011 IEEE International Symposium on, pp. 1100–1105, June 2011. A. Chowdhury and M. Razzak, “Single phase grid-connected photovoltaic inverter for residential application with maximum power point tracking,” in 2013 International Conference on Informatics, Electronics Vision (ICIEV), pp. 1–6, May 2013. J.M. Kwon, K.H. Nam, and B.H. Kwon, “Photovoltaic power conditioning system with line connection,” IEEE Transactions on Industrial Electronics, vol. 53, pp. 1048–1054, June 2006. M. Bahrman and B. Johnson, “The abcs of HVDC transmission technologies,” IEEE Power and Energy Magazine, vol. 5, pp. 32–44, March 2007. R. Carballo, R. Nunez, V. Kurtz, and F. Botteron, “Design and implementation of a three-phase dc-ac converter for microgrids based on renewable energy sources,” IEEE Latin America Transactions, (Revista IEEE America Latina), vol. 11, pp. 112–118, Feb 2013. R. W. Erickson and D. Maksimovic, Fundamentals of power electronics. Kluwer Academic Pub., 2nd ed., 2000. K. J. Astrom and R. Murray, Feedback systems: An introduction for scientists and engineers. CaltechBOOK, 2010. M. Rashid, Power Electronics Handbook: devices, circuits and applications. Academic press, 2nd ed., 2007. V. K. Sood, HVDC and FACTs controllers: Applications of static converters in power systems. Springer, 1st ed., 2004. D. Mohan, B. Singh, and B. Panigrahi, “A new control strategy for active and reactive power control of three-level VSC based HVDC system,” in 2010 Annual IEEE India Conference (INDICON), pp. 1–4, Dec 2010. G. Li, G. Li, H. Liang, C. Zhao, and M. Yin, “Research on dynamic characteristics of VSC-HVDC system,” in 2006. IEEE Power Engineering Society General Meeting, pp. 5 pp.–, 2006. H. Abouobaida and M. Cherkaoui, “Comparative study of maximum power point trackers for fast changing environmental conditions,” in Multimedia Computing and Systems (ICMCS), 2012 International Conference on, pp. 1131–1136, May 2012. C. Murdoch and S. Reynoso, “Design and implementation of a MPPT circuit for a solar UAV,” IEEE Latin America Transactions, (Revista IEEE America Latina), vol. 11, pp. 108–111, Feb 2013 V. Salas, E. Ol´ıas, A. Barrado, and A. La´zaro, “Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems,” Solar Energy Materials and Solar Cells, vol. 90, no. 11, pp. 1555 – 1578, 2006.. R. Babuska, Fuzzy and Neuronal Control, Course Lecture Notes. Delft University of Technology, 2009. Nelson L. Díaz A. nació en Bogotá, Colombia. Es Ingeniero Electrónico de la Universidad Distrital Francisco José de Caldas de Bogotá, Colombia. Obtuvo su título de Maestría en Automatización Industrial en la Universidad Nacional de Colombia. Actualmente, se encuentra desarrollando estudios de doctorado en Tecnologías Energéticas en la Universidad de Aalborg en Dinamarca. Se desempeña como profesor asistente en el área de electrónica de potencia y circuitos digitales en la Universidad Distrital Francisco José de Caldas de Bogotá, Colombia, y pertenece como investigador al Laboratorio de Investigación en Fuentes Alternativas de Energía - LIFAE donde realiza estudios sobre diseño, modelado y control de convertidores de potencia. César L. Trujillo R. nació en Bogotá, Colombia. Es Ingeniero Electrónico de la Universidad Distrital Francisco José de Caldas de Bogotá, Colombia. Obtuvo su título de Maestría en Ingeniera – Ingeniería Eléctrica en la Universidad Nacional de Colombia. Obtuvo su PhD en Ingeniería Electrónica en la Universidad Politécnica de Valencia, España. Actualmente, se desempeña como profesor titular en el área de electrónica de potencia en la Universidad Distrital Francisco José de Caldas de Bogotá, Colombia, y pertenece como investigador al Laboratorio de Investigación en Fuentes Alternativas de Energía - LIFAE donde realiza estudios sobre microrredes eléctricas, modelamiento y control de convertidores de potencia, y generación distribuida. Johann A. Hernández M. nació en Bogotá, Colombia. Es Ingeniero Electricista de la Universidad Nacional de Colombia, de Bogotá, Colombia. Obtuvo su título de Maestría en Ingeniera – Ingeniería Eléctrica en la Universidad Nacional de Colombia, de Bogotá, Colombia. Obtuvo su doctorado en la Universidad Nacional de Colombia, de Bogotá, Colombia. Actualmente se desempeña como profesor asociado en el área sistemas fotovoltaicos en la Universidad Distrital Francisco José de Caldas de Bogotá, Colombia, y es director del Laboratorio de Investigación en Fuentes Alternativas de Energía - LIFAE donde realiza estudios sobre fuentes no convencionales de energía, eficiencia energética, microrredes eléctricas, y generación distribuida.