Universidad de Extremadura
Anuncio

Universidad de Extremadura
Escuela Politécnica
Ingeniería Informática
PROYECTO FI DE CARRERA
Implementación de algoritmos de tratamiento de imágenes en
tarjetas gráficas programables
Hugo María Vegas Carrasco
Septiembre, 2008
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Universidad de Extremadura
Escuela Politécnica
Ingeniería Informática
PROYECTO FI DE CARRERA
Implementación de algoritmos de tratamiento de imágenes en
tarjetas gráficas programables
Autor: Hugo María Vegas Carrasco
Fdo:
Director: Antonio Plaza Miguel
Fdo:
Tribunal Calificador
Presidente: Pablo Martínez Cobo
Fdo:
Secretario: David Valencia Corrales
Fdo:
Vocal: José Moreno del Pozo
Fdo:
CALIFICACIÓ:
FECHA:
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
3
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Resumen
En el presente Proyecto de Fin de Carrera (PFC) proponemos la utilización de una
nueva herramienta para la programación de tarjetas gráficas de la gama NVIDIA,
denominada CUDA (Compute Unified Device Architecture), para acelarar el
rendimiento computacional de algoritmos de tratamiento de imágenes, con particular
énfasis en el tratamiento de imágenes hiperespectrales de la superficie terrestre,
obenidas a partir de sensores remotos de observación de la tierra. Los algoritmos de
análisis hiperespectral se caracterizan por su gran complejidad de cómputo y por el
gran consumo de tiempo que se produce cuando se intentan procesar las imágenes
proporcionadas por los sensores a través de soluciones basadas en CPU, debido al
gran tamaño de dichas imágenes y a la complejidad computacional inherente a los
algoritmos. Conviene destacar que la tecnología CUDA tiene apenas un año de vida,
pero su aparición ha supuesto una revolución en cuanto a la posibilidad de desarrollar
aplicaciones paralelas de carácter general utilizando tarjetas gráficas programables o
graphical processing units (GPUs).
En el presente PFC además hemos contextualizado el uso de GPUs frente a otras
arquitecturas especializadas de alto rendimiento que se vienen utilizando en
aplicaciones de tiempo real relacionadas con observación remota de la tierra, tales
como los sistemas reconfigurables de tipo field programable gate array (FPGA). En
concreto, el algoritmo seleccionado para ilustrar la posibilidad de implementar
técnicas de análisis hiperespectral en GPUs es el método Pixel Purity Index (PPI),
que se basa en la búsqueda de píxeles extremos (es decir, espectralmente más puros)
en la imagen hiperespectral, de forma que dichos píxels pueden utilizarse para
“desmezclar” otros píxels formados por sustancias con diferente composición a nivel
sub-píxel como resultado de las limitaciones en la resolución espacial de los
sensores. La implementación desarrollada del algoritmo PPI en una GPU es
contrastada y evaluada experimentalmente (en términos de precisión en la selección
de píxels puros y rendimiento computacional) con respecto a la versión original del
algoritmo PPI disponible en la herramienta Environment for Visualizing Images
(ENVI) de ITTVIS, utilizando para ello imágenes hiperespectrales simuladas y
reales, proporcionadas por el sensor Airborne Visible Infra-Red Imaging
Spectrometer (AVIRS) del Jet Propulsion Laboratory de NASA.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
5
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
6
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
1. Motivaciones y Objetivos
1.1. Motivaciones
La principal motivación del presente PFC consiste en evaluar la posibilidad de
utilizar tarjetas gráficas programables en aplicaciones de observación remota de la
tierra a partir del tratamiento de imágenes hiperespectrales. En particular, el uso de
algoritmos de detección de píxeles puros en imágenes hiperespectrales es una
práctica habitual en este campo, ya que dicho proceso permite abordar el fenómeno
de la mezcla espectral que se produce en dichas imágenes, lo cual facilita la
utilización y explotación de los datos en diversas aplicaciones independientemente
de las limitaciones introducidas por la resolución espacial.
Entre los algoritmos más ampliamente utilizados con este fin, se encuentran los
algoritmos de detección de píxeles puros o “endmembers”, de entre los cuales uno de
los más utilizados es el método PPI (Píxel Purity Index). Este algoritmo tiene la
ventaja de ser muy efectivo, además de no estar basado en un método muy complejo
de cálculo de los píxeles extremos, lo cual lo hace muy asequible a la hora de ser
implementado de forma eficiente mediante arquitecturas de computación paralela.
Sin embargo, conviene destacar los algoritmos de análisis hiperespectral
generalmente necesitan grandes cantidades de tiempo a la hora de proporcionar
resultados, debido a la complejidad computacional de los mismos (en el caso de PPI,
el algoritmo debe ejecutar un gran número de iteraciones) y también debido al gran
tamaño de las imágenes a procesar, lo cual requiere que la transferencia de datos
entre el procesador y el dispositivo hardware especializado utilizado como
coprocesador deba optimizarse. Al requerir tantas iteraciones, y tener dentro de estas
operaciones no triviales, los algoritmos de análisis hiperespectral generalmente se
traducen en un consumo de CPU elevado, por lo que la utilización de arquitecturas
especializadas como coprocesadores puede resultar una alternativa altamente
interesante.
Hasta la fecha, las técnicas tradicionales en la literatura para abordar este
problema han optado por soluciones basadas en el uso de clusters y sistemas
multiprocesador. La computación cluster, a pesar de su adaptabilidad al problema del
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
7
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
tratamiento de datos hiperspectrales (especialmente, cuando dichos datos se
encuentran almacenados en un repositorio de datos en tierra), presenta problemas en
cuanto al procesamiento de los datos en tiempo real dado el alto coste y elevados
requerimientos en cuanto a espacio, peso y consumo (denominado payload en
misiones de observación remota de la tierra). Por otra parte, la instalación de un
cluster suele llevar asociada la disponibilidad de un número elevado de ordenadores
interconectados entre sí para que compartan el procesamiento de datos a través de sus
procesadores, lo cual hace incrementar la velocidad de ejecución y procesamiento de
las aplicaciones; sin embargo, cada nodo (u ordenador) lleva ligado un precio y una
serie de requerimientos en cuanto a espacio y consumo que alejan esta aproximación
de las características requeridas en cuanto a payload en misiones reales de
observación remota de la tierra.
Para solucionar estos problemas relativos a coste, consumo y peso, y además
ofrecer además mejoras sustanciales en cuanto al tiempo de procesamiento, en el
presente PFC proponemos una alternativa basada en un nuevo modelo de tratamiento
de imágenes hiperespectrales basado en la utilización de GPUs. Conviene destacar
que, con una sóla GPU, pueden llegar a obtenerse mejoras notables a la hora de
procesar cálculos de tipo científico, como es el caso de los algoritmos de tratamiento
de imágenes hiperespectrales, a un coste razonable (no más de 500 euros) y además
ocupando un espacio mínimo. No obstante, no todas las tarjetas GPU disponibles en
el mercado se ajustan a nuestros requerimientos. Por ello si aplicamos los algoritmos
propuestos a través de tarjetas convencionales o de gama baja, veremos que los
resultados no sufren ningún tipo de mejoría; es más, podemos llegar a obtener peores
resultados. Finalmente, indicar que en este proyecto se ha intentado ir un poco más
allá, y para trabajar de forma totalmente innovadora se ha utilizado la arquitectura
CUDA incorporada en as tarjetas gráficas de NVIDIA de las series 8 (ó superiores),
Quadro y Tesla, siendo algunas de las tarjetas de la primera gama las que han sido
objeto de estudio en este PFC.
8
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
1.2. Objetivos
El principal objetivo del presente trabajo es el desarrollo y comparación de técnicas
computacionalmente eficientes, basadas en procesamiento mediante GPUs, para la
detección de píxeles espectralmente puros, a través del algoritmo PPI en imágenes
hiperespectrales. Para ello se utilizarán tarjetas GPU de tipo GeForce 8800 GTX y
GeForce 8600 GT, un procesador Core 2 Quad Q6600 a 2.40 GHz y 2GB RAM y las
implementaciones del algoritmo PPI disponibles en la herramienta ENVI 4.2 y las
implementaciones serie y paralelas desarrolladas en los lenguajes C y CUDA con
motivo del presente PFC. Para todas las implementaciones propuestas se comparan
los resultados obtenidos tanto en lo relativo a la precisión de los algoritmos como en
lo relativo a su rendimiento computacional, utilizando para ello imágenes simuladas
y reales obtenidas por un sensor hiperespectral de altas prestaciones (AVIRIS). El
objetivo general mencionado, se lleva a cabo en la presente memoria mediante unos
objetivos específicos, los cuales se enumeran a continuación:
•
Analizar las ventajas e inconvenientes de las diferentes versiones
propuestas para el algoritmo PPI.
•
Establecer un estudio comparativo de las diferentes versiones paralelas
del algoritmo PPI desarrolladas, tanto en lo relativo a su precisión a la
hora de identificar los píxels más puros de la imagen como a la hora de
analizar su rendimiento computacional con respecto a las versiones serie.
•
Comparar los resultados obtenidos por la metodología propuesta con
respecto a los proporcionados por otras técnicas estándar de análisis
hiperespectral.
Teniendo presentes los anteriores objetivos, vamos a describir como está
organizada esta memoria, viendo sus diferentes capítulos cuyos contenidos se
describen a continuación:
•
Análisis hiperespectral: este capítulo describe conceptos previos
sobre análisis hiperespectral, incluyendo el concepto de imagen
hiperespectral, las técnicas más populares para desmezclado de este
tipo de datos, y la necesidad de paralelismo para su procesamiento
eficiente.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
9
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
•
Programación de tarjetas gráficas: este apartado describe algunos
aspectos fundamentales sobre la programación de tarjetas gráficas, y
describe algunas herramientas utilizadas en el presente trabajo tales
como el lenguaje CUDA y las GPUs utilizadas en el estudio.
•
Métodos: en este capítulo se incluyen los datos más técnicos acerca
del algoritmo PPI, y además se realiza una explicación de la versión
en CPU, GPU y ENVI del algoritmo.
•
Análisis y discusión de los resultados: en este capítulo se analizan
los resultados experimentales obtenidos, analizando las características
de una GPU frente a otra, de una CPU frente a la otra, describiendo
imágenes simuladas y reales que se han utilizado para realizar las
comparativas, y concluyendo con un análisis y discusión detallada de
los resultados obtenidos.
•
Conclusiones y líneas futuras de trabajo: en este apartado se
expondrán las principales conclusiones derivadas del proyecto, así
como las líneas futuras de trabajo que pueden derivarse a partir del
mismo.
•
Bibliografía:
el
proyecto
incluye
una
exhaustiva
revisión
bibliográfica que permitirá al lector profundizar en mayor detalle en
los diferentes aspectos teóricos y relativos a la implementación de los
algoritmos descritos en la presente memoria.
•
Anexos: los anexos del PFC incluyen un manual de usuario que
explica paso a paso la instalación de los diferents componentes
necesarios para crear y ejecutar programas en CUDA, un primer
seguimiento de la creación de un proyecto nuevo en CUDA, y los
códigos debidamente documentados del algoritmo PPI implementado
en la CPU y en la GPU, así como el algoritmo PPI disponible en el
paquete ENVI 4.2.
10
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
11
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
2. Análisis hiperespectral
El presente capítulo se organiza de la siguiente forma. En primer lugar, describimos
el concepto de imagen hiperespectral, detallando las particularidades y características
propias de este tipo de imágenes de alta dimensionalidad. A continuación,
describimos algunas características genéricas de los sensores de adquisición de este
tipo de datos, haciendo énfasis en los sensores utilizados en el presente trabajo.
Seguidamente, se muestra una visión general de las técnicas de desmezclado
disponibles en la actualidad, con particular énfasis en el modelo lineal de mezcla,
utilizado en el presente trabajo para abordar el problema de la caracterización subpíxel de una imagen hiperespectral a partir de la identificación de los píxels
espectralmente más puros en la misma. El capítulo concluye destacando la necesidad
de de paralelismo en este campo.
2.1. Concepto de imagen hiperspectral
El resultado de la toma de datos por parte de un sensor hiperespectral sobre una
determinada escena puede ser representado en forma de cubo de datos, con dos
dimensiones para representar la ubicación espacial de un píxel, y una tercera
dimensión que representa la singularidad espectral de cada píxel en diferentes
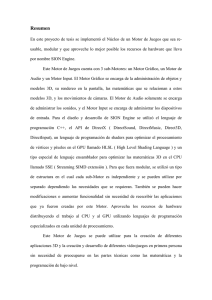
longitudes de onda [1]. La Figura 1 muestra la estructura de una imagen
hiperespectral donde el eje X es el indicador de las líneas, el eje Y es el indicador de
las muestras y el eje Z es el número de bandas, es decir, la longitud de onda de esa
banda (canal). Como puede apreciarse en la Figura 2.1, el resultado de la toma de
datos por parte de un sensor hiperespectral sobre una determinada escena puede ser
representado en forma de cubo de datos, con dos dimensiones para representar la
ubicación espacial de un pixel, y una tercera dimensión que representa la
singularidad espectral de cada pixel en diferentes longitudes de onda. En concreto, la
capacidad de observación de los sensores denominados hiperespectrales permite la
obtención de una firma espectral detallada para cada píxel de la imagen, dada por los
valores de reflectancia adquiridos por el sensor en diferentes longitudes de onda, lo
cual permite una caracterización muy precisa de la superficie de nuestro planeta.
12
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Ba
nd
1
as
-4
ND en banda 4
Muestras
ND en banda 3
ND en banda 2
ND en banda 1
Pixel en
posición (x,y)
Líneas
Figura 2.1: Concepto de imagen hiperespectral.
Conviene destacar que, en este tipo de imágenes, es habitual la existencia de
mezclas a nivel de subpixel, por lo que a grandes rasgos podemos encontrar dos tipos
de píxels en estas imágenes: píxel puros y píxel mezcla [2]. Se puede definir un píxel
mezcla como aquel en el que cohabitan diferentes materiales. Este tipo de píxel en
realidad constituyen la mayor parte de la imagen hiperespectral, en parte, debido a
que este fenómeno es independiente de la escala considerada ya que tiene lugar
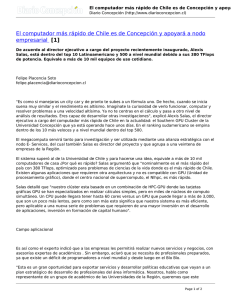
incluso a niveles microscópicos [3]. La Figura 2.2 muestra un ejemplo del proceso de
adquisición de píxels puros (a nivel macroscópico) y mezcla en imágenes
hiperespectrales.
Pixel mezcla
(suelo + rocas)
Reflectancia
4000
3000
2000
1000
0
300 600 900 1200 1500 1800 2100 2400
Pixel puro
(agua)
Reflectancia
Long. onda (nm)
4000
3000
2000
1000
0
300 600 900 1200 1500 1800 2100 2400
Long. onda (nm)
Pixel mezcla
(vegetación + suelo)
Reflectancia
5000
4000
3000
2000
1000
0
300 600 900 1200 1500 1800 2100 2400
Long. onda (nm)
Figura 2.2: El fenómeno de la mezcla en imágenes hiperespectrales.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
13
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
El desarrollo tecnológico introducido por la incorporación de sensores
hiperespectrales en plataformas de observación remota de la tierra de última
generación ha sido particularmente notable durante los últimos años. En este sentido,
conviene destacar que dos de las principales plataformas de tipo satélite que se
encuentran en funcionamiento en la actualidad: Earth Observing-1 de NASA
(http://eo1.gsfc.nasa.gov)
y
ENVISAT
de
la
Agencia
Espacial
Europea
(http://envisat.esa.int), llevan incorporados sensores de este tipo, permitiendo así la
posibilidad de obtener imágenes hiperespectrales de la práctica totalidad del planeta
de manera casi continua. A continuación, describimos brevemente las características
de los sensores hiperespectrales utilizados en el presente estudio.
2.2. Sensores hiperespectrales
En la actualidad, existe una amplia gama de sensores hiperespectrales de observación
remota de la tierra. Dichos sensores pueden clasificarse según el modo en que son
transportados (plataforma de transporte) en el momento de la toma de datos [4-6]. La
mayor parte de los sensores hiperespectrales actuales son aerotransportados (siendo
el ejemplo más claro de este tipo de instrumentos el sensor Airborne Visible InfraRed Imaging Spectrometer (AVIRIS) de NASA Jet Propulsion Laboratory
(http://aviris.jpl.nasa.gov). Otros sensores aerotransportados ampliamente utilizados
son DAIS 7915 (Digital Airborne Imaging Spectrometer), el cual cubre un amplio
rango del espectro mediante 79 canales espectrales comprendidos entre 0.4 y 12.5
µm, y ROSIS (Reflective Optics System Imaging Spectrometer), capaz de medir
información espectral entre 0.4 y 0.9 µm utilizando 92 canales espectrales
(http://www.dlr.de). También destaca el sensor hiperespectral aerotransportado
HYDICE (HYperspectral DIgital Collection Experiment) utilizado en aplicaciones
militares. Finalmente, en algunos proyectos se utilizan sensores hiperespectrales
instalados en plataformas de tipo satélite como CHRIS/Proba (http://www.chrisproba.org.uk) o Meris (http://envisat.esa.int/instruments/meris) de la Agencia
Espacial Europea, o Hyperion de NASA. En el presente trabajo, nos centramos en la
utilización del sensor AVIRIS, cuyas principales características son descritas a
continuación.
14
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
AVIRIS es un sensor hiperespectral aerotransportado con capacidades
analíticas en las zonas visible e infrarroja del espectro [8-10]. Este sensor está en
funcionamiento desde 1987. Fue el primer sistema de adquisición de imágenes capaz
de obtener información en una gran cantidad de bandas espectrales estrechas y casi
contiguas. AVIRIS es un instrumento único en el mundo de la teledetección, pues
permite obtener información espectral en 224 canales espectrales contiguos,
cubriendo un rango de longitudes de onda entre 0.4 y 2.5 m, siendo el ancho entre las
bandas muy pequeño, aproximadamente 0.01 m. En 1989, AVIRIS se convirtió en un
instrumento aerotransportado. Desde ese momento, se realizan varias campañas de
vuelo cada año para tomar datos mediante AVIRIS. El sensor ha realizado tomas de
datos en Estados Unidos, Canadá y Europa, utilizando para ello dos plataformas:
• Un avión ER-2 perteneciente a NASA/Jet Propulsion Laboratory. El ER-2
puede volar a un máximo de 20 km sobre el nivel del mar, a una velocidad
máxima de aproximadamente 730 km/h.
• Un avión denominado Twin Otter, capaz de volar a un máximo de 4 km sobre
el nivel del mar, a velocidades de 130 km/h.
Algunas de las características más relevantes en cuanto al diseño interno del
sensor AVIRIS son las siguientes:
• El sensor utiliza un explorador de barrido que permite obtener un total de 614
píxels por cada oscilación.
• La cobertura de la parte visible del espectro es realizada por un espectrómetro
EFOS- A, compuesto por un array de 32 detectores lineales.
• La cobertura en el infrarrojo es realizada por los espectrómetros EFOS-B,
EFOS-C y EFOS-D, compuestos todos ellos por arrays de 64 detectores
lineales.
• La señal medida por cada detector se amplifica y se codifica utilizando 12
bits. Esta señal se almacena en una memoria intermedia donde es sometida a
una etapa de preprocesado.
• El sensor dispone de un sistema de calibración a bordo, que utiliza una
lámpara halógena de cuarzo que proporciona la radiación de referencia
necesaria para comprobar el estado de los diferentes espectrómetros.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
15
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
• A lo largo de los últimos años, el sensor ha ido mejorando sus prestaciones en
cuanto a la relación señal-ruido o signal-to-noise ratio (SNR), como se
muestra en la Figura 2.3, que describe la evolución de la relación SNR del
sensor a lo largo de los últimos años.
Figura 2.3: Evolución de la relación señal-ruido en el sensor AVIRIS de NASA.
2.3. Técnicas de análisis hiperespectral basadas en el
modelo lineal de mezcla
La mayoría de las técnicas de análisis hiperespectral desarrolladas hasta la fecha
presuponen que la medición obtenida por el sensor en un determinado píxel viene
dada por la contribución de diferentes materiales que residen a nivel sub-píxel. El
fenómeno de la mezcla puede venir ocasionado por una insuficiente resolución
espacial del sensor, pero lo cierto es que este fenómeno ocurre de forma natural en el
mundo real, incluso a niveles microscópicos, por lo que el diseño de técnicas capaces
de modelar este fenómeno de manera adecuada resulta imprescindible. No obstante,
las técnicas basadas en este modelo son altamente costosas desde el punto de vista
computacional.
En este sentido, el modelo lineal de mezcla [11] expresa los píxels mezcla como
una combinación lineal de firmas asociadas a componentes espectralmente puros
(llamados endmembers) en la imagen [12]. Este modelo ofrece resultados
satisfactorios cuando los componentes que residen a nivel sub-píxel aparecen
16
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
espacialmente separados, situación en la que los fenómenos de absorción y reflexión
de la radiación electromagnética incidente pueden ser caracterizados siguiendo un
patrón estrictamente lineal. En la actualidad, el modelo lineal de mezcla es el más
utilizado en análisis hiperespectral, debido a su sencillez y generalidad.
Endmember s
Banda j
mezcla:
c1 s + c2 v = –c3 u
mezcla:
1/2 u + 1/2 s
s
centroide:
1/3 u + 1/3 v + 1/3 s
v
Endmember v
u
Endmember u
mezcla:
1/2 u + 1/2 v
Banda i
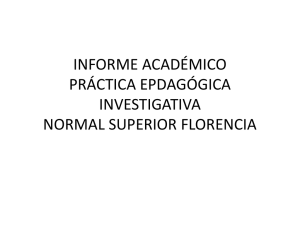
Figura 3.4: Interpretación gráfica del modelo lineal de mezcla
El modelo lineal de mezcla puede interpretarse de forma gráfica en un espacio
bidimensional utilizando un diagrama de dispersión entre dos bandas poco
correlacionadas de la imagen (ver Fig. 3.4). En la misma, puede apreciarse que todos
los puntos de la imagen quedan englobados dentro del triángulo formado por los tres
puntos más extremos (los más puros). Los vectores asociados a dichos puntos
constituyen un nuevo sistema de coordenadas con origen en el centroide de la nube
de puntos, de forma que cualquier punto de la imagen puede expresarse como
combinación lineal de los puntos más extremos, siendo estos puntos son los mejores
candidatos para ser seleccionados como endmembers [13]. Como consecuencia de
este fenómeno, el paso clave a la hora de aplicar el modelo lineal de mezcla consiste
en identificar de forma correcta los elementos extremos de la nube de puntos Ndimensional (conviene destacar que la Figura 3.4 ofrece una simplificación reducida
en un espacio de dos dimensiones mientras que el proceso de búsqueda de extremos,
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
17
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
en el caso de una imagen hiperespectral real, tiene lugar en un espacio con cientos de
dimensiones, tantas como el número de bandas espectrales del sensor.
En la literatura reciente se han propuesto numerosas aproximaciones al
problema de identificación de endmembers en imágenes hiperespectrales. En el
presente trabajo, nos centramos en una de las técnicas más sencillas y eficientes a la
hora de su implementación paralela: el método Pixel Purity Index (PPI) [9], que se
basa en la generación repetitiva de vectores unitarios con orientación aleatoria en la
nube de puntos de forma que todos los puntos de la imagen hiperespectral se
proyectan sobre cada vector unitario, identificando los puntos extremos en la
dirección definida por dicho vector e incrementando un contador asociado a dichos
puntos. Tras la ejecución de un número amplio de iteraciones, se obtiene como
resultado una imagen de pureza, formada por los índices asociados a cada uno de los
pixels de la imagen, a partir de la cual se extrae un conjunto final de endmembers
utilizando técnicas de análisis y visualización interactiva.
2.4. Necesidad de paralelismo
Conviene destacar que las técnicas de análisis hiperespectral anteriormente descritas
se basan en la realización de operaciones matriciales que resultan muy costosas
desde el punto de vista computacional [14]. Sin embargo, el carácter repetitivo de
estas operaciones las hace altamente susceptibles de ser implementadas en diferentes
tipos de arquitecturas paralelas, permitiendo así un incremento significativo de su
rendimiento en términos computacionales y dotando a dichas técnicas de la
capacidad de producir una respuesta en tiempo casi real. Esta tarea es clave para la
explotación de dichas técnicas en aplicaciones que requieren una respuesta en tiempo
casi real.
Una ventaja a favor de la utilización de soluciones paralelas en análisis
hiperspectral, es que estas operaciones suelen realizarse mediante repeticiones de un
mismo procedimiento, lo cual nos lleva a pensar que puedan ser implementadas en
diferentes tipos de arquitecturas [15-17], obteniendo un incremento significativo de
su rendimiento en términos de cómputo. Tradicionalmente, las técnicas de
computación cluster han sido ampliamente utilizadas en aplicaciones de análisis
hiperspectral una vez que los datos han sido enviados a tierra. No obstante, las
18
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
características de este tipo de arquitecturas (ver Fig. 3.5) no se adaptan de forma
óptima a los requerimientos de procesamiento a bordo y en tiempo real impuestos
por algunas aplicaciones de análisis hiperespectral, tales como seguimiento de
incendios en tiempo real, monitorización de vertidos químicos en aguas y atmósfera,
etc. En este sentido, el uso de clusters en aplicaciones de análisis hiperespectral
puede ser una alternativa interesante de cara al procesamiento de grandes repositorios
de datos sin requerimientos de tiempo real; sin embargo, desde el punto de vista del
coste global del sistema, de su calentamiento, consumo y posibilidad de instalación
en un sensor real (payload), existen arquitecturas con mayores prestaciones desde el
punto de vista de su utilización a bordo del sensor, tales como dispositivos hardware
especializados de tipo FPGA y GPU.
Figura 3.5: Configuración típica de un cluster de ordenadores.
En el presente proyecto, proponemos abordar este requerimiento mediante
arquitecturas multiprocesador de tipo GPU. Pensamos que esta aproximación resulta
más económica y además está basada en un tipo de tecnología más sofisticado y
adaptado a los requerimientos de procesamiento en tiempo casi real impuestos por
las aplicaciones de análisis hiperespectral (la tarjeta GeForce 8800 GTX usada en
este PFC lleva incorporados 128 procesadores de tipo “stream”, trabajando cada uno
a 1.35 Ghz). En este sentido, la implementación eficiente de las técnicas de análisis
hiperespectral propuestas en la presente memoria se lleva a cabo en dos generaciones
de tarjetas GPU GeForce 8800 GTX y GeForce 8600 GT, gracias a la arquitectura
CUDA integrada en las mismas. En el siguiente capítulo describimos en mayor
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
19
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
detalle la arquitectura CUDA y expondremos de forma más concreta las razones que
nos han llevado a usar GPUs como alternativa de procesamiento paralelo de datos.
3. Programación de tarjetas gráficas
El presente capítulo se organiza de la siguiente forma. En primer lugar, describimos
el papel de las GPUs como elemento de procesamiento especializado para el
procesamiento de datos científicos en paralelo. A continuación describimos CUDA
como una herramienta eficaz para la programación de tarjetas gráficas en
aplicaciones científicas de propósito general, destacando aquellos aspectos que
consideramos más relevantes de cara a la presentación de implementaciones de
algoritmos de análisis hiperespectral sobre GPUs utilizando CUDA, haciendo
especial hincapié en las características concretas del modelo NVidia GeForce 8800
GTX que ha sido utilizado como referencia a la hora de realizar las nuevas
implementaciones propuestas en este trabajo las cuales serán abordadas en el
siguiente capítulo de la presente memoria. El capítulo concluye destacando algunos
aspectos sobre el modelo de programación de tarjetas GPU de última generación
utilizando CUDA, el cual sirve como preámbulo al siguiente capítulo en el que
describimos la implementación del algoritmo PPI utilizando CUDA que se ha
desarrollado en el presente trabajo.
3.1. La GPU como arquitectura de propósito general para el
procesamiento de datos científicos
Desde un tiempo a esta parte, las GPUs programables han evolucionado como un
elemento con una gran carga de trabajo, como podemos apreciar en la Figura 3.1.
Con múltiples núcleos dirigidos por un gran ancho de banda de memoria, hoy por
hoy las GPUs ofrecen prestaciones muy elevadas para procesamiento gráfico y
científico [19-22].
Antes de examinar en detalle la arquitectura de una arquitectura GPU GeForce
8800 GTX de NVidia (http://www.nvidia.com), consideramos relevante explicar
como han funcionado las operaciones en un pipeline de una GPU clásica a lo largo
de los años. No obstante, para entender este proceso, también debemos introducir los
conceptos de vertex shaders y los píxel shaders.
20
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Figura 3.1: Evolución en el número de operaciones en coma flotante por segundo
para la CPU y la GPU
3.1.1. Vertex shaders y píxel shaders
Los shaders son pequeños programas que se encargan del procesamiento de vértices
(vertex shaders) y de pixeles (píxel shaders). La principal ventaja es que, como su
naturaleza lo indica, pueden ser programados por el desarrollador, otorgando una
flexibilidad que hasta antes de la aparición de los shaders era algo impensable.
Recursos como las operaciones condicionales o los saltos se utilizan de forma similar
que en los lenguajes más conocidos. Sin los shaders, muchos de los efectos eran
realizados en conjunto con la unidad de procesamiento central, disminuyendo en
gran medida el rendimiento y limitando el avance a nivel gráfico de los mismos.
Un vertex shader es una función que recibe como parámetro un vértice. Sólo
trabaja con un vértice a la vez, y no puede eliminarlo, sólo transformarlo. Para ello,
modifica propiedades del mismo para que repercutan en la geometría del objeto al
que pertenece. Con esto se pueden lograr ciertos efectos específicos, como los que
tienen que ver con la deformación en tiempo real de un elemento; por ejemplo, el
movimiento de una ola. Donde toma una gran importancia es en el tratamiento de las
superficies curvas.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
21
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
En cambio, un píxel shader básicamente especifica el color de un píxel. Este
tratamiento individual de los píxeles permite que se realicen cálculos principalmente
relacionados con la iluminación del elemento del cual forman parte en la escena, y en
tiempo real.
La incorporación de los píxel shaders y vertex shaders permite a los
programadores una mayor libertad a la hora de diseñar gráficos en tres dimensiones,
ya que puede tratarse a cada píxel y cada vértice por separado. De esta manera, los
efectos especiales y de iluminación pueden crearse mucho más detalladamente,
sucediendo lo mismo con la geometría de los objetos.
3.1.2. Secuencia o pipeline clásico de procesamiento en una GPU
Cuando revisamos las arquitecturas hardware, el flujo de datos, y las operaciones
pipeline, a menudo es bueno empezar por el nivel más alto, donde los datos llegan
desde la CPU a la GPU, y el proceso se desarrolla hacia abajo a través de múltiples
fases de procesamiento hasta que un pixel es dibujado definitivamente en la pantalla.
Para situarnos, las GPUs han utilizado diseños pipeline tradicionales, como los que
aparecen ilustrados en la Figura 3.2.
Figura 3.2: Pipeline clásico de procesamiento para una GPU.
22
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Después de que la GPU recibe los datos vertex (vértices) desde el host (CPU),
la fase vertex se ejecuta en primer lugar. La función de fijado transforma la imagen y
el hardware de luminosidad operado en esta fase se lleva a cabo; entonces los
píxeles shaders programables, y el control de flujo dinámico de los modelos shaders
entran en juego. El siguiente paso en el pipeline clásico es la configuración, donde
los vértices son ensamblados dentro de primitivas como triángulos, líneas o puntos.
Las primitivas son convertidas por la fase de “rasterization” en fragmentos de píxeles
(o simplemente fragmentos), pero no son considerados píxeles completos en esta
fase. Los fragmentos están sometidos a muchas otras operaciones como sombreado,
Z-testing, la posible mezcla en el buffer frame, y el antialiasing. Los fragmentos son
finalmente considerados píxeles cuando han sido escritos en el buffer frame.
A continuación, la siguiente fase es la de píxel shader, que debería ser
denominada técnicamente como fase fragment shader, pero utilizamos la notación
estándar en la literatura [19-22] debido a su aceptación. En el pasado, los fragmentos
sólo podían haber tenido valores de color aplicados de textura simple. Hoy en día, la
capacidad de sombreado de un píxel programado de la GPU permite numerosos
efectos de sombreado para ser aplicados mientras se trabaja de acuerdo con métodos
complejos de multitextura. Específicamente, los fragmentos sombreados (con color y
valores Z) desde esta fase píxel son enviados al ROP (Raster Operations). La fase
ROP es donde se chequea el buffer Z para asegurar que sólo los fragmentos visibles
son procesados rápidamente, y los fragmentos visibles, si son parcialmente
transparentes, son mezclados con el buffer de frame existente, junto con los píxeles y
aplicandoles antialiased. El píxel procesado final es enviado a la memoria buffer para
ser escaneado y visualizado en el monitor [19].
3.1.3. Evolución del uso de GPUs en aplicaciones científicas
La principal razón que justifica la gran popularidad de las arquitecturas GPU en
aplicaciones científicas es el hecho de que la GPU está especializada para cómputo
intensivo, computación paralela elevada (exactamente sobre lo que trata el
renderizado de gráficos) y por tanto se designan más transistores dedicados al
procesamiento de datos, que a la recolección de datos y control de flujo.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
23
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Más específicamente, la GPU está especialmente pensada para direccionar
problemas que pueden ser expresados como computaciones de datos paralelos (el
mismo programa es ejecutado en muchos elementos de datos en paralelo) con gran
intensidad aritmética (el ratio de operaciones aritméticas respecto a operaciones de
memoria). Como el mismo programa es ejecutado para cada elemento de datos, hay
menos requisitos para un flujo de control sofisticado; y como es ejecutado en muchos
elementos de datos y tiene gran intensidad aritmética, la latencia de acceso a
memoria puede ser ocultada con cálculos, en vez de datos muy grandes de caché
[20].
Hasta la fecha, sin embargo, a pesar de acceder a todo el poder de
computación contenido en al GPU y usarlo eficientemente para aplicaciones
científicas, seguía siendo difícil obtener las siguientes pautas:
•
La GPU solamente podía ser programada a través de la API (Application
Programming Interface) gráfica; esto provocaba que la curva de
aprendizaje para un desarrollador principiante fuese muy elevada, ya que
tenía que trabajar con una API inadecuada, que no estaba adaptada a la
aplicación científica.
•
La DRAM de la GPU podía ser leída de manera general (los programas
de GPU pueden obtener elementos de datos de cualquier parte de la
DRAM) pero no se podía escribir de manera general (los programas de
GPU no pueden esparcir la información a cualquier parte de la DRAM),
eliminando mucha de la flexibilidad de programación ya disponible en la
CPU.
•
Algunas aplicaciones tenían en problema del “cuello de botella”, debido
al ancho de banda de la memoria DRAM, utilizando escasamente el poder
computacional de la GPU.
En este sentido, una de las principales motivaciones del presente PFC es
demostrar que dichas limitaciones en la actualidad pueden superarse mediante la
utilización de la arquitectura CUDA para procesamiento de datos científicos en la
GPU. Dicho aspecto será abordado en detalle en el siguiente subapartado del
presente capítulo de la memoria.
24
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
3.2. CUDA: Una nueva arquitectura para procesamiento de
datos científicos en GPUs
CUDA viene del inglés Compute Unified Device Architecture y es una nueva
arquitectura hardware y software, diseñada para dar y manejar procesamientos en la
GPU como un elemento de computación de datos paralelos sin la necesidad de
mapearlos a una API de gráficos. Está disponible para las versiones GeForce 8
Series, Quadro FX 5600/4600, y Tesla. El mecanismo de multitarea del sistema
operativo es responsable de manejar el acceso a la GPU mediante CUDA, y las
aplicaciones gráficas funcionan de forma simultánea. A continuación describimos el
pipeline unificado del que disponen las actuales GPUs de NVIDIA y que puede ser
explotado de forma eficiente mediante CUDA, así como la arquitectura completa de
la GeForce 8800 GTX, la GPU con mayores prestaciones considerada en este PFC.
El apartado finaliza describiendo los diferentes modelos de programación en CUDA.
3.2.1. Pipeline unificado
A partir del modelo de pipeline clásico, con sus flujos de datos empezando en lo más
alto, donde los vértices con varios atributos, índices, comandos, y texturas son
pasados a la GPU desde la CPU. Las fases de procesamiento mayores siguen una
manera lineal segura incluyendo vertex shading, píxel shading, operaciones raster,
(que son operaciones a través de las cuales un área espacial queda dividida en celdas
regulares, en las que cada una de las cuales presentan unos atributos o valor, como
pueden ser la altitud, reflectancia, etc.) y escritura de píxeles en el buffer frame.
Con este pipeline unificado y la arquitectura “shader”, el diseño de la GPU
GeForce 8800 reduce significativamente el número de fases del pipeline y cambia el
flujo secuencial para estar más orientado a bucle. Las entradas son alimentadas en la
parte alta del núcleo shader unificado, y las salidas son escritas en registros y
entonces vuelven otra vez a la parte alta del núcleo shader para la próxima
operación. Como resultado, en el diagrama GPU unificado generalizado que se
miestra en la Figura 3.3, los flujos de datos bajan secuencialmente por el pipeline a
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
25
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
través de diferentes tipos “shader”. La figura de la derecha representa un núcleo
“shader” unificado con uno o más procesadores “shader” unificados estandarizados.
Figura 3.3: Pipeline clásico frente a pipeline unificado.
Como puede apreciarse en la Figura 3.3, los datos vienen de la parte superior
izquierda del diseño unificado (como vértices), y son llevados al núcleo shader para
su procesamiento, y los resultados son enviados de vuelta a la parte superior del
núcleo shader, donde son llevados otra vez, procesados otra vez, mandados de vuelta
a la parte superior, y así hasta que todas las operaciones shader son ejecutadas y el
fragmento de píxel se pasa al subsistema ROP [19].
3.2.2. Arquitectura GeForce 88GTX
A lo largo de la presente memoria hemos cubierto muchos de los puntos básicos de la
programación de GPUs de NVidia, así que ahora podemos echar un vistazo a los
aspectos específicos de la arquitectura GeForce 8800 GTX, la tarjeta más importante
de las que estamos usando para realizar este PFC [19]. La siguiente Figura 3.4
describe la arquitectura hardware de dicha tarjeta. Como podemos apreciar en la
figura, el bloque de interfaz del host incluye buffers para recibir comandos, datos
vertex, y texturas enviadas a la GPU desde el controlador gráfico ejecutándose en la
CPU. Lo siguiente, es el ensamblador de entrada, que encuentra datos vertex desde
los buffers y los convierte a formato de coma flotante 32, mientras que también
26
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
genera varios índices que sirven de ayuda para llevar a cabo varias operaciones
repetidas en los vértices y las primitivas, y para habilitar el instanciado.
Figura 3.4: Arquitectura de la GPU GeForce 8800 GTX de NVidia.
La GPU GeForce 8800 GTX incluye 128 procesadores de flujo (SPs) descritos
en el diagrama, y cada SP es capaz de ser asignado a cualquier operación “shader”
específica. Los datos pueden ser movidos rápidamente desde la salida de un
procesador de flujo a la entrada de otro.
3.2.1. Modelo de programación CUDA
Antes de profundizar en el modelo de programación empleado por CUDA,
destacamos que la pila del software de CUDA se compone de varias capas, tal y
como muestra la Figura 3.5. En concreto, dichas capas son un controlador de
hardware, una API y su runtime, y dos librerías matemáticas de alto nivel para uso
común, CUFFT y CUBLAS. El hardware ha sido diseñado para soportar
controladores ligeros y capas runtime, dando como resultado una ejecución óptima.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
27
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
En este sentido, la API de CUDA es una extensión del lenguaje de programación C,
lo cual hace que tenga una curva de aprendizaje mínima.
Figura 3.5: Pila de CUDA.
Por otra parte, CUDA ofrece un direccionamiento de carácter general para la
memoria DRAM como ilustra la Figura 3.6. Este modelo de direccionamiento
permite obtener mayor flexibilidad en la programación, en el sentido de que ofrece
tanto la operación de reparto de datos como la de obtención de estos. Desde una
perspectiva de programación, esto se traduce en la habilidad de leer y escribir datos
en cualquier lugar de la DRAM, exactamente igual que en la CPU [20].
28
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Figura 3.6: Operaciones de lectura y escritura en CUDA.
Por otra parte, CUDA ofrece una cache de datos paralelos (o memoria on-chip
compartida) con un acceso de lectura y escritura general bastante rápido, decidiendo
qué hilos se usan para compartir datos entre ellos. Como podemos ver en la Figura
3.7, las aplicaciones pueden tomar ventaja de esto por la minimización de sobrecarga
y las idas y vueltas a DRAM, y por tanto llega a ser menos dependiente del ancho de
banda de memoria en al DRAM.
Figura 3.7: La memoria compartida ofrece datos cerrados a las ALUs
Una vez descritos los aspectos introductorios anteriormente mencionados,
procedemos a describir el modelo de programación de CUDA, el cual está basado en
3 aspectos clave: el coprocesador multihilo, los hilos para realizar el tratamiento de
la información por lotes, y finalmente la implementación hardware en CUDA.
3.2.1.1. Coprocesador Multihilo
Cuando programamos a través de CUDA, la GPU es usada por el desarrollador como
un dispositivo especializado en cálculo, capaz de ejecutar un gran número de hilos en
paralelo. La GPU opera como un coprocesador de la CPU principal, o host: en otras
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
29
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
palabras, datos paralelos, porciones de cálculo intensivas de aplicaciones
ejecutándose en el host están descargados en el dispositivo GPU.
De manera más precisa, una porción de una aplicación que es ejecutada
muchas veces, pero independientemente en datos distintos, puede ser aislada en una
función que se ejecuta en el mecanismo tantas veces como hilos distintos hay. Como
dicha función es compilada, la instrucción obtenida a partir del device (en nuestro
caso, la GPU) y el programa resultante, llamado kernel, se descargan en el device.
Tanto el host como el device mantienen su propia DRAM, referidas como memoria
del host y memoria del device respectivamente. Una puede copiar datos de una
memoria a la otra a través de llamadas a una API optimizada, que usa el Acceso
Directo a Memoria (DMA) del device [20].
3.2.1.2. Hilos de tratamiento por lotes
El tratamiento por lotes de los hilos que ejecuta el kernel está organizado como un
grid de hilos de bloques, ilustrado en la Figura 3.8. Un bloque de hilos es un lote de
hilos que pueden cooperar juntos compartiendo datos eficientemente a través de
algunas memorias rápidas de compartición de datos y sincronizando sus ejecuciones
para coordinar los accesos a memoria. De forma precisa, uno puede especificar
puntos de sincronización en el kernel, donde los hilos en un bloque están
suspendidos hasta que todos ellos alcancen el punto de sincronización. Cada hilo es
identificado por su identificador de hilo (thread ID), que es el número de hilo con el
bloque [20].
Hay un número límite como máximo de hilos que un bloque puede contener
(512 hilos concretamente). Sin embargo, los bloques de misma dimensión y tamaño
que ejecutan el mismo kernel pueden ser tratados por lotes de forma conjunta, en un
grid de bloques, así que el número total de hilos puede ser lanzado en una única
invocación del kernel es mucho más largo. Esto se debe al gasto de reducir la
cooperación entre hilos, porque los hilos en diferentes bloques de hilos del mismo
grid no pueden comunicarse ni sincronizarse con los de los demás. Este modelo
permite a los kernels ejecutarse eficientemente sin recompilación en varios devices
con diferentes capacidades paralelas: un device puede ejecutar todos los bloques de
30
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
un grid secuencialmente si tiene algunas capacidades, o en paralelo si tiene muchas,
o normalmente una combinación de ambas [20].
Figura 3.8: Tratamiento por lotes de hilos de ejecución.
Con respecto al modelo de momoria, conviene destacar que un hilo que se
ejecuta en el device tiene sólo acceso a la DRAM del device y a la memoria on-chip a
través de los espacios de memoria descritos en la Tabla 3.1. Los espacios de
memoria global, constante y de textura pueden ser leídos o escritos por el host, y
persisten a través del kernel lanzándolos con la misma aplicación. Estos espacios son
optimizados por diferentes usos de memoria. La memoria de textura también ofrece
diferentes modos de direccionamiento, así como un filtro de datos para algunos
formatos específicos [20].
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
31
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Tabla 3.1: Lecturas y escrituras en los diferentes tipos de memorias
3.2.1.3. Implementación hardware y modelo de ejecución
El dispositivo GPU es implementado como un conjunto de multiprocesadores como
se puede ver en la Figura 3.9. Cada multiprocesador tiene una Instrucción Única
(Single Instruction), y arquitectura de Datos Múltiples (Multiple Data architecture ó
SIMD): en cada ciclo de reloj dado, cada procesador del multiprocesador ejecuta la
misma instrucción, pero opera en datos distintos. Los espacios de memoria local y
global son implementados como regiones de la memoria del device. Cada
multiprocesador accede a la cache de textura mediante una unidad de textura que
implementa los diferentes modos de direccionamiento y filtros de datos [20].
32
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Figura 3.8: Modelo hardware de la GPU.
Con respecto al modelo de ejecución en la GPU, conviene destacar que un
grid de bloques de hilos es ejecutado en el device ejecutando uno ó más bloques en
cada multiprocesador, usando porciones de tiempo: cada bloque se corta en grupos
SIMD de hilos llamados warps (tramas), cada uno de estos warps contiene el mismo
número de hilos, llamado warp size (que es de 32 hilos), y es ejecutado por el
multiprocesador en un modo SIMD; un programador de hilos selecciona
periódicamente de un warp a otro, para maximizar el uso de los recursos de
computación del multiprocesador. Una half-warp es o bien la primera o la segunda
parte de un warp. La manera en que un bloque es dividido en warps es siempre la
misma; cada warp contiene hilos consecutivos, incrementando los IDs de los hilos
con el primer warp conteniendo el hilo 0.
Un bloque es procesado solamente por un multiprocesador, así que el espacio
de memoria compartida reside en la memoria on-chip compartida, llevando a unos
accesos a memoria muy rápidos. Los registros del multiprocesador están localizados
entre los hilos del bloque. Si el número de registros usados por hilo, multiplicado por
el número de hilos en el bloque, es mayor que el número total de registros por
multiprocesador, el bloque no puede se ejecutado y el correspondiente kernel fallaría
al lanzarse. Por otra parte, varios bloques pueden ser procesados por el mismo
multiprocesador concurrentemente, situando los registros del multiprocesador y la
memoria compartida entre los bloques.
La orden emitida de los bloques con el grid de bloques de hilos no está
definida, y no hay un mecanismo de sincronización entre los bloques, así los hilos de
dos bloques diferentes del mismo grid no pueden comunicarse de forma segura con
los demás a través de la memoria global durante la ejecución del grid [20].
Finalmente, destacamos que el uso de múltiples GPUs, como las devices de
CUDA, permiten que una aplicación se ejecute en un sistema multi-GPU solamente
si las GPUs son del mismo tipo. Si el sistema está en el modo SLI quizás, sólo una
GPU puede ser usada como una device de CUDA ya que todas las GPUs están
fusionadas en los niveles más bajos en la pila del driver. El modo SLI necesita estar
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
33
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
apagado en el panel de control de CUDA para ser capaz de ver cada GPU como un
device separado [20].
34
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
4. Métodos
El presente capítulo se organiza de la siguiente forma. En primer lugar describimos
el algoritmo PPI de forma genérica. A continuación detallamos diferentes
implementaciones de dicho algoritmo, incluyendo una versión serie para ejecución
en CPUs monoprocesador y una versión paralela para ejecución en GPUs.
Finalmente, comentamos algunos aspectos sobre la implementación del algoritmo en
el software comercial ENVI, basados en nuestra interpretación de la versión del
algoritmo disponible en dicho software comercial.
4.1. Algoritmo Pixel Purity Index (PPI)
El algoritmo PPI [9] pertenece al conjunto de los métodos interactivos de extracción
de endmembers y es el más representativo. Su objetivo es localizar los puntos
espectralmente más puros de la imagen hiperespectral, basándose en la suposición de
que los puntos más extremos del conjunto de puntos son los mejores candidatos para
ser utilizados como endmembers. Los parámetros de entrada del algoritmo son el
número de iteraciones a realizar y el valor umbral para seleccionar pixels puros. A
grandes rasgos, el funcionamiento del algoritmo puede resumirse en los siguientes
pasos:
1.
En primer lugar, el algoritmo asigna un índice de pureza a todos los
pixels de la imagen. El contador de cada punto se inicializa al valor 0.
2.
Seguidamente, se genera un vector unitario aleatorio, que recibe el
nombre de skewer o “divisor”. El objetivo de este vector es particionar el
conjunto de puntos, como veremos a continuación.
3.
El tercer paso consiste en proyectar todos los puntos de la imagen
hiperespectral sobre el vector unitario antes generado, identificando los
puntos extremos en la dirección definida por el vector unitario. El índice
de pureza de los puntos extremos se incrementa en una unidad.
4.
Los pasos 2-3 del algoritmo se repiten tantas veces como el usuario
especifique en el parámetro de entrada, número de iteraciones.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
35
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
5.
Tras la ejecución de un número amplio de iteraciones, se obtiene como
resultado una imagen de pureza formada por los índices asociados a cada
uno de los pixels de la imagen.
6.
Utilizando el valor umbral especificado como parámetro, se seleccionan
los puntos de la imagen cuyo índice de pureza asociado supera dicho
valor umbral. Estos puntos son etiquetados como “puros”. La Figura 4.1
ilustra el procedimiento seguido hasta este punto, suponiendo que se
trabaja en un espacio de dos dimensiones y que se realizan tres
iteraciones y que se seleccionan como endmembers aquellos puntos que
han sido seleccionados como extremos una o más veces.
7.
Los pixels seleccionados se cargan en una herramienta interactiva
disponible en el software ENVI y denominada 4-Dimensional
Visualizer, la cual permite realizar diagramas de dispersión de los
primeros autovectores obtenidos tras la aplicación de una transformación
sobre los datos originales. Utilizando la herramienta anteriormente
descrita, el usuario selecciona manualmente aquellos puntos o
agrupaciones de puntos que aparecen como extremos en proyecciones
sucesivas, identificando un conjunto final de endmembers. En el caso de
seleccionar una agrupación de puntos, los endmembers se obtienen a
partir del espectro promedio en cada una de las regiones seleccionadas.
A partir de la descripción anteriormente mencionada, puede derivarse que el
método PPI contiene etapas totalmente automatizadas, como la fase de generación de
la imagen de pureza, pero es necesaria una etapa final, altamente interactiva, en la
que el usuario selecciona manualmente los pixels que quiere utilizar como
endmembers. El usuario no conoce a priori cuál es el número apropiado de
endmembers a seleccionar, por lo que debe escoger el número de endmembers en
base a su intuición. Este hecho pone de manifiesto la conveniencia de cierto
conocimiento a priori sobre la imagen. Esta característica, unida a otras como la
aleatoriedad en el proceso de generación de vectores unitarios (ver Figura 4.1),
representan los principales inconvenientes de esta metodología [18]. Por otra parte,
es importante destacar que el método PPI puede generar endmembers artificiales en
caso de que el usuario del método seleccione conjuntos de puntos en el proceso
interactivo de identificación de firmas espectrales extremas.
36
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Skewer 1
Pixel extremo
Skewer 2
Pixel extremo
Skewer 3
Pixel extremo
Pixel extremo
Figura 4.1: Funcionamiento del algoritmo PPI en un espacio de dos dimensiones.
A partir de la Figura 4.1, puede derivarse que el algoritmo PPI se basa en
generar un gran número de vectores aleatorios (skewers), los cuales se multiplican
escalarmente por cada píxel (vector) de la imagen original. Si el número de vectores
generados es muy elevado, esta operación podría tardar varias decenas de minutos en
realizarse a través de una computación estándar [18]. Por tanto, nuestra propuesta es
implementar
esta
fase
de
proyecciones
múltiples
(la
más
costosa
computacionalmente) en la GPU, de tal forma que cargaremos la imagen en
memoria, le pasaremos los datos correspondientes a la GPU, y esta realizará el
producto escalar en cada iteración del algoritmo, devolviéndonos los resultados
oportunos. Incidiendo en la complejidad computacional de esta fase, la complejidad
C de la misma en términos de operaciones MAC (multiplicación seguida de
acumulación) puede expresarse como C = 4 x K x D, donde D es el número de
bandas, K el número de skewers, y 4 es el número de bandas espectrales de la
imagen original. Por ejemplo, procesando el algoritmo PPI en una imagen
hiperespectral de satélite de unos 512 x 614 píxeles de 224 bandas con 10000
“skewers”, requiere calcular más de 7 × 1011 MACs, lo cual supone un gran tiempo
de computación muy elevado para un microprocesador. Afortunadamente, la
computación de todas las proyecciones es independiente y el algoritmo puede
implementarse en paralelo de forma muy eficiente.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
37
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Para concluir este apartado, describimos los pasos exactos que se han seguido
en la implementación del algoritmo PPI en sus versiones CPU y GPU:
1. Generación de vectores aleatorios (skewers): en este procede a generar un
largo número de vectores 4-dimensionales (4 es el número de Bandas de la
imagen hiperespectral) aleatorios. Para ello aplica un algoritmo de
aleatoriedad basado en que a cada valor aleatorio generado, le vamos a
aplicar su norma. En concreto, el cálculo realizado es el siguiente:
4
norma _ it =
∑ v (k ) * v ( k )
k =1
siendo v(k ) el valor en el vector generado aleatoriamente para la banda k.
Una vez tenemos calculada la norma, dividimos cada valor del vector
aleatorio por dicha norma, quedándonos:
skewer _ it = skewer _ it / norma _ it
2. Realización del producto escalar (dot-product): este paso es fundamental a
la hora de obtener el cálculo del índice de pureza de cada píxel o PPI. Gracias
a dicho cálculo, obtendremos los valores de cada píxel, que después se
tendrán en cuenta para calcular los extremos en cada iteración. Este producto
escalar será llevado a cabo por cada píxel que forma parte de la imagen junto
al skewer perteneciente a la iteración actual. La forma de realizar el producto
escalar usada en este PFC es:
4
dp ( x) = ∑ x(k ) * skewer (k )
k =1
es decir,
si x = {a1 , a 2 , a3 ,..., a 4 } y skewer = {b1 , b2 , b3 ,..., b4 } ,
entonces:
dp( x) = a1 * b1 + a 2 * b2 + a3 * b3 + ... + a 4 * b4
donde x representa al píxel objeto del producto escalar.
38
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
3. Cálculo de los píxeles extremos: una vez tenemos calculado todos los
productos de cada píxel, con el vector aleatorio generado específicamente
para la iteración en la que se encuentra el algoritmo, entonces buscamos los
extremos de la imagen. Los píxeles extremos, según el criterio que hemos
seguido para realizar el PPI, son aquellos píxeles que producen el valor
máximo y mínimo en su producto escalar, para esa iteración; luego si
identificamos a E, como al conjunto formado por los píxeles extremos, y Pr
como el conjunto de productos escalares de esa iteración, entonces un píxel x,
es extremo cuando cumple:
x ∈ E si y sólo si dp ( x) = MAX (Pr) ∨ dp ( x) = MI4 (Pr) ,
es decir, cuando producto escalar de ese píxel es, o bien el máximo o bien el
mínimo para la iteración it del algoritmo. Los pasos 2 y 3 serán repetidos
tantas veces como iteraciones formen el algoritmo, sin embargo, los pasos 1 y
4 sólo serán realizados una vez, al principio y al final respectivamente.
4. Selección final de los endmembers: una vez tenemos escogidos todos los
extremos, debemos eliminar aquellos píxeles que no superen un cierto valor
umbral indicado en el algoritmo; es decir, todos los píxeles que hayan sido
escogido un número menor de veces que dicho umbral, no serán tenidos en
cuenta a la hora de formar parte de los extremos reales de la imagen. Si Er, es
el conjunto de los extremos que superan dicho umbral, y que formarán la
imagen resultado de aplicar el algoritmo PPI, y S es un conjunto que guarda
el número de veces que un píxel a sido escogido como extremo a lo largo de
la ejecución, lo anteriormente explicado es equivalente a la siguiente
ecuación:
Si x ∈ E entonces x ∈ Er si y sólo si S ( x) ≥ umbral .
Conviene destacar que esta última etapa (paso 4 del algoritmo) puede
realizarse de múltiples formas y que en la herramienta ENVI este paso se realiza de
forma supervisada. En el presente PFC, nuestro interés radica en acelerar los pasos 13 del algoritmo ya que la imagen PPI puede ser explotada de formas diversas
(supervisada y automática) para extraer el conjunto final de endmembers.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
39
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Supongamos, por ejemplo, que para una iteración determinada del algoritmo,
los pares (mínimo, iMIN) y (máximo, iMAX) contienen respectivamente (125,36) y
(230,63). Esto significa que hasta ahora, el valor de producto escalar más bajo ha
sido producido por el píxel 36 y el mayor por el píxel 63. Si el producto escalar
actual es igual a 90, entonces el par (125,36) es reemplazado por el par (90,
píxel_actual) para esta iteración. Sin embargo, esto no garantiza que dicho píxel
foma parte del conjunto final de píxeles extremos, ya que para producirse tal hecho,
deberá ser escogido un número mayor o igual de veces que el umbral.
Partiendo de la descripción del algoritmo PPI anteriormente descrita, a
continuación describimos la implementación que se ha desarrollado para el algoritmo
en versión GPU, finalizando con algunos aspectos relativos a la implementación en
ENVI del algoritmo. Conviene destacar que, en la versión serie del algoritmo (no
descrita) toda la carga de trabajo va a ser llevada única y exclusivamente por el
procesador, mientras que la versión paralela descrita a continuación utiliza la GPU
como coprocesador. Por razones ilustrativas, la Tabla 4.1 muestra el pseudo-código
de la versión serie del algoritmo PPI implementada en el lenguaje C.
// Inicialización
Comprobar Fichero(); // ver si es correcto, si tiene valores aceptables
ObtenerValorMaximo();
NormalizarImagen(); // Valores quedan en el rango [0,1]
GenerarVectoresAleatorios(); //para el producto escalar
InicializarVectores();
InicializarTimer(); // Empieza a contar el tiempo de procesamiento
// PPI
Para i desde 1 hasta Iteraciones hacer
Inicio
ProductoEscalar(); // para todos los píxeles
MarcarExtremoMáximo();
MarcarExtremoMínimo();
CalculoRatio();
FinPara
// Procesamiento de datos
PararTimer();
MostrarTimer();
MostrarRatio();
MarcarExtremosUmbral(); // sólo serán extremos los píxeles >= umbral
MostrarCuantosExtremos();
EscribirImagenPPI();
// Liberación de mamoria
LiberarMemoriaResevada();
Tabla 4.1: Implementación serie del algoritmo PPI.
40
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
4.2. Implementación del algoritmo PPI en GPUs
Como se ha comentado en el capítulo 2 de la presente memoria, las GPUs modernas
implementan una generalización del proceso de renderizado (rendering pipeline).
Los procesadores de vértices y de fragmentos son los elementos programables del
pipeline, y los programas que ejecutan se llaman vertex y fragment shaders,
respectivamente. La etapa de procesamiento de vértices realiza operaciones sobre el
flujo de vértices enviados a la GPU. Los procesadores de vértices transforman cada
uno de esos vértices en un vértice 2D en el espacio de proyección, y calculan la
iluminación para determinar su color. En la actualidad, esta etapa es totalmente
programable, lo cual permite realizar transformaciones personalizadas para así
conseguir efectos especiales. Una vez transformados, los vértices se reensamblan
formando triángulos y se rasterizan en un flujo de fragmentos. Estos fragmentos son
las porciones discretas de la superficie del triángulo correspondientes a los píxels de
la imagen representada. Aparte de identificar los fragmentos que constituyen el
triángulo, la etapa de rasterización también interpola atributos almacenados en los
vértices, tales como las coordenadas de texturas, y posteriormente almacena dichos
valores como atributos de cada fragmento. Los procesadores de fragmentos calculan
el color resultante utilizando operaciones aritméticas y de acceso a texturas. Con este
propósito, la memoria de texturas se puede indexar con distintas coordenadas de
texturas y los valores de textura se pueden obtener a partir de múltiples texturas. Para
incrementar la eficiencia computacional, estos procesadores soportan instrucciones
vectoriales cortas que operan sobre vectores de 4 componentes (canales
Red/Green/Blue/Alpha) al estilo SIMD, e incluyen unidades de acceso a texturas que
operan con una caché de texturas segmentada. Además, la latencia de los accesos a
datos se oculta utilizando pre-búsqueda de texturas y transfiriendo bloques de datos
2D desde la memoria a la caché de texturas. Finalmente, los resultados obtenidos por
el procesador de fragmentos se combinan con la información existente almacenada
en la posición 2D asociada en el frame buffer, para producir el color final. Los
procesadores de fragmentos son generalmente de mayor utilidad que los
procesadores de vértices para implementar aplicaciones no relacionadas con gráficos
(como es el caso de la aplicación que nos ocupa). Esto se debe a que su número es
mayor, y también a su mejor rendimiento en términos de acceso a memoria.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
41
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
En cualquier caso, es importante destacar que el mapeo de aplicaciones sobre
GPU requiere estructurar los cálculos según un modelo de flujos, en el que los
núcleos se expresan como programas de fragmentos y los flujos de datos se expresan
como texturas. Este paradigma de programación ha sido estudiado por diversos
investigadores, que han adaptado un gran número de aplicaciones científicas a las
características intrínsecas de las GPUs.
Antes de describir la implementación del algoritmo PPI en GPUs, discutimos
brevemente los mecanismos a la hora de mapear imágenes hiperespectrales en forma
de texturas. Aunque el uso de una sola textura 3D representa la elección más natural
y sencilla, las GPUs trabajan mejor con texturas bidimensionales, por lo que se optó
por dividir cada imagen hiperespectral en una pila de texturas 2D, tal y como muestra
la Figura 4.2 para un caso sencillo con 5 particiones. En caso de que la imagen
hiperespectral supere la capacidad de memoria de la GPU, la división se efectúa
teniendo en cuenta que la partición almacena píxels (vectores) completos, es decir,
cada partición tiene toda la información espectral de una zona espacial localizada.
Figura 4.2: Particionamiento de la imagen hiperespectral para su procesamiento.
Teniendo en cuenta el esquema de particionamiento anteriormente descrito, a
continuación se describe la implementación basada en flujos realizada para el
algoritmo PPI. La implementación consta de una serie de pasos claramente
diferenciados que iremos desglosando y detallando de forma individual a lo largo del
presente apartado.
42
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
1. Inicialización. En esta etapa se crean todas las variables involucradas en la
ejecución del algoritmo, así como reservas de memoria, divide la imagen en
trozos (según el esquema descrito en la Figura 4.2) y los almacena como
flujos en la memoria de la GPU.
2. Cálculo de proyecciones. En esta etapa se calcula el algoritmo PPI
propiamente dicho en la GPU, en particular, la etapa en la que se efectúan las
proyecciones de los skewers y los píxels de la imagen. La etapa de selección
de endmembers final a partir de la imagen PPI no se ha implementado para su
ejecución eficiente en la GPU, por lo que queda abierta a diferentes
aproximaciones para la selección de endmembers (supervisadas y no
supervisadas).
3. Liberación de memoria. Finalmente, en esta etapa se libera la memoria
reservada durante el proceso y se finaliza la ejecución en la CPU. A
continuación, describimos en mayor detalle técnico cada una de las tres partes
de la implementación en GPU del algoritmo PPI, proporcionando ejemplos de
codificación por razones de claridad.
3.2.1. Inicialización
De forma previa a la descripción de la etapa de inicialización, destacamos algunas
variables importantes que serán utilizadas por el algoritmo y cuyo valor será
establecido en la etapa de incialización. Dichas variables son las siguientes:
•
Dimensión de bloque X: esta variable indica el valor de la dimensión X
(líneas) de cada bloque o partición de la imagen hiperespectral.
•
Dimensión de bloque Y: esta variable indica el valor de la dimensión Y
(muestras) de cada bloque o partición de la imagen hiperespectral.
•
Variables device: son variables especiales que se necesitan para procesar
los datos en la GPU. Cada variable host (CPU) requiere su homóloga
device (GPU) siempre y cuando se requieran esos datos que inicialmente
están en CPU para operar en le GPU. En el código se pueden diferenciar
porque la nomenclatura de las variables host lleva una “h” en su nombre,
y las de device una “d”.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
43
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Conviene destacar que, por definiciones del fabricante, se recomienda que el
tamaño total del bloque (número de hilos que contiene) sea siempre múltiplo del
tamaño del warp (que es 32); y aun mejor se recomienda que sea múltiplo de 64,
porque así el compilador y el organizador de hilos organizan las instrucciones de la
manera más óptima posible para evitar conflictos con el banco de registros en
memoria. Es por ello que en este proyecto se ha optado por que las dimensiones con
las que trabaje la GPU sean X = 8 e Y = 8 para cada bloque. Es también importante
destacar que, a lo largo de la implementación, se probaron otros valores, pero no
supusieron una mejora de tiempo de ejecución.
Una vez descrito el proceso de particionamiento de la imagen hiperespectral,
procedemos a comentar los pasos involucrados en la etapa de inicialización. En
primer lugar, es preciso incluir una serie de librerías:
#include <cutil.h>
#include <imagen_kernel.cu>
La primera librería, cutil.h, es propia de CUDA y contiene instrucciones útiles
para la búsqueda de ficheros, carga de imágenes, funciones para el timer, etc. Por su
parte, la segunda librería, imagen_kernel.h, hace referencia al kernel
implementado en la GPU, es decir, la función que comunicará a la CPU y a la GPU y
que hará posible el intercambio de datos entre una y otra. La implementación GPU
comienza con una llamada a la función:
CUT_DEVICE_INIT();
Esta función es propia de CUDA, y pone en marcha la GPU y la prepara para recibir
datos. Una vez realizado este proceso, el siguiente paso es cargar la imagen con la
que queremos trabajar a través de otra función CUDA, perteneciente a la librería
cutil.h:
char* image_path = cutFindFilePath(image_filename,argv[0]);
El siguiente paso consiste en definir las dimensiones para los bloques y el grid:
44
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
dim3 bloque(blockdimX, blockdimY,1);
dim3 grid(iDivUp(Lineas,bloque.x), iDivUp(Muestras,bloque.y),1);
Conviene destacar que dim3 es un tipo especial de datos CUDA; concretamente un
vector de 3 datos de tipo unsigned int, usado para especificar dimensiones. A
continuación, el siguiente paso relevante de la implementación consiste en reservar la
memoria para ubicar la imagen en memoria:
cudaMalloc( (void**) &d_Mat, Muestras*Lineas*Bandas*sizeof(float));
La función cudaMalloc es la proporcionada por CUDA para la reserva de memoria
de variables device, es decir, variables que después se van a usar para transferir datos
de la memoria a la GPU. Es decir, al igual que malloc se usa en la CPU (host) para
reservar memoria, la función enquivalente para reservar memoria en la GPU es
cudaMalloc.
A continuación describimos el proceso para intercambiar información entre la
CPU y la GPU. Para ello, se utilizan las siguientes líneas de código:
cudaMemcpy(d_Mat, h_Mat, Muestras*Lineas*Bandas*sizeof(float),
cudaMemcpyHostToDevice);
Con la función cudaMemcpy intercambiamos los datos entre la CPU y la GPU (e
incluso entre variables del mismo tipo). La dirección de intercambio se realiza
mediante el último parámetro. En el ejemplo podemos ver como se indica claramente
que
el
intercambio
es
de
CPU
a
GPU
mediante
el
parámetro
cudaMemcpyHostToDevice. Conviene destacar, sin embargo, que cualquiera de
las combinaciones es posible. Por último, antes de describir la parte del código
relacionada con el procesamiento del algoritmo propiamente dicho, destacamos la
utilización de una serie de funciones facilitadas para la creación y puesta en marcha
de los timers, que servirán para contabilizar el tiempo transcurrido desde el inicio del
algoritmo hasta que este haya calculado los extremos para así poder evaluar el
tiempo empleado durante el proceso. Las funciones se utilizan de la siguiente forma:
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
45
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
cutCreateTimer(&timer);
cutStartTimer(timer);
3.2.2. Cálculo de proyecciones
El primer paso en la implementación propiamente dicha del algoritmo PPI en la GPU
es establecer las iteraciones que se van a realizar en el algoritmo. Para ello, es preciso
realizar una llamada al kernel denominado CalculoEscalar, que se encarga de
realizar todos los cálculos escalares a través de la GPU:
CalculoEscalar<<<grid, bloque>>>(d_Mat,d_VEsc,d_aleat,i);
Por razones ilustrativas, a continuación mostramos el código completo de dich
kernel, que constituye el núcleo fundamental del algoritmo en la GPU:
__global__ void CalculoEscalar(float * Mat, float *vec_tot, float* aleat,
int iter)
{
int i;
float res;
//Calculo del id del hilo correspondiente
int ix = blockDim.x * blockIdx.x + threadIdx.x;
int iy = blockDim.y * blockIdx.y + threadIdx.y;
int id = iy*Lineas + ix
//Si el id calculado tiene correspondencia con una posición de la
//matriz, realizamos el producto escalar
if(id >= 0 && id < Muestras*Lineas){
//Variable que guardará el resultado del producto escalar
res = 0.0;
//Hacemos el producto escalar.
for(i = 0; i < Bandas; i++)
res = res + (aleat[iter*Bandas + i] * Mat[id*Bandas +
i]);
//Asignamos el resultado al pixel correspondiente
vec_tot[id] = res;
}
}
46
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
En el trozo de código mostrado anteriormente, podemos comprobar que lo
primero que se realiza es calcular el identificador de hilo correspondiente al hilo que
está ejecutando en ese momento dicha función, y que haremos corresponder con un
píxel de la imagen. Este trozo de código será ejecutado por todos los hilos de la
GPU. Es por ello que no observamos ningún bucle dentro del mismo (a excepción
del de el cálculo escalar). Después sencillamente hacemos el producto escalar entre
dicho píxel y el vector aleatorio generado para esa iteración, y copiamos el resultado
en el vector de los productos escalares, usando otra vez el identificador del hilo
calculado previamente, para asignarle la posición concreta. Una vez finalizado el
proceso, volvemos a utilizar los timers para obtener el tiempo empleado en el
proceso del cálculo de proyecciones:
cutStopTimer(timer);
printf("Processing time: %f (ms)\n", cutGetTimerValue(timer));
cutDeleteTimer(timer);
En primer lugar se calcula el tiempo empleado utlizando el timer; a continuación, se
traduce el timer a milisegundos; y finalmente se elimina el timer ya que no volverá a
ser utilizado.
3.2.3. Liberación de memoria
La última parte de la implementación del algoritmo PPI en la GPU consiste en liberar
la memoria. Mientras que en el código CPU se usa la sentencia free para liberar la
memoria de los vectores reservados como tales, en la GPU los vectores reservados en
memoria device se liberan mediante la sentencia cudaFree:
cudaFree(d_aleat);
Después de ver todo esto, podemos darnos cuenta de las similitudes existentes entre
el código C y el CUDA, lo cual revela que CUDA permite reutilizar una gran parte
del código C a la hora de desarrollar la implementación para la GPU.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
47
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
4.3. Implementación del algoritmo PPI en ENVI
Para concluir este capítulo describimos la implementación del algoritmo PPI
disponible en ENVI, la cual será empleada como referencia a la hora de validar la
implementación GPU desarrollada con motivo del presente trabajo. La Figura 4.3
muestra un diagrama de flujo explicando los principales pasos involucrados en la
versión implementada en ENVI del algoritmo PPI.
ENVI’s N-Dimensional visualizer
Figura 4.3: Implementación del algoritmo PPI en ENVI.
El primer aspecto destacable en cuanto al algoritmo PPI de ENVI es que dicho
algoritmo realiza una etapa de reducción dimensional previa sobre la imagen original
basada en la transformación MNF (Minimum 4oise Fraction), que proporciona una
descripción detallada de la relación existente entre la cantidad de señal presente en la
imagen y la cantidad de ruido. De este modo, la primera banda resultante de la
transformación MNF es la que presenta mayor relación SNR. La segunda banda
presenta mejor SNR que la tercera, y así sucesivamente. Una vez aplicado el proceso
de identificación de píxels puros mediante generación de proyecciones aleatorias, el
resultado del PPI es usado normalmente como entrada del visualizado de la
herramienta 4-Dimensional Visualizer que permite seleccionar un conjunto de
endmembers de forma supervisada. Es importante destacar que el usuario no conoce
a priori cuál es el número apropiado de endmembers a seleccionar, por lo que debe
escoger el número de endmembers en base a su intuición. Este hecho pone de
manifiesto la conveniencia de cierto conocimiento a priori sobre la imagen.
48
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Sí queremos ver este hecho de forma más detallada, podemos usar el Spectral
Hourglass Wizard de ENVI, que nos guiará paso a paso a través del flujo de
procesamiento, incluyendo al PPI, para encontrar y mapear los endmembers de la
imagen espectral desde datos hiperespectrales o multiespectrales. Además, la version
de PPI usada por ENVI, está basada en un método denominado Fast PPI, que carga
los datos de la imagen en memoria y ejecuta los cálculos en memoria, acelerando
mucho más el proceso, que con el método PPI basado en disco, pero requiere una
cantidad de memoria adecuada para ello. Dicho método utiliza un subconjunto
espacial y espectral o un array pequeño de datos (resolución de submuestras) para
ayudar a adecuar los datos de la imagen en la memoria. ENVI nos informa de la
cantidad de memoria necesaria para ejecutar el Fast PPI y nos avisa para continuar.
Cuando usamos Fast PPI, también tenemos las opciones de crear un nuevo
archivo de salida y añadirle la banda de salida existente. Al seleccionat archivos de
entrada, podemos usar la opción 4ew Output Band la primera vez que ejecutamos el
PPI. Una banda de salida conteniendo el número de veces que cada píxel fue
seleccionado como extremo es creada y usada como entrada para el 4-Dimensional
Visualizer de ENVI. Después de todo lo visto anteriormente, empezamos con el
algoritmo. Lo primero es seleccionar el número de iteraciones. Este número valdrá
para indicar el número de veces que los datos serán proyectados en el vector
aleatorio. Cuantas más iteraciones ejecutemos, mejor será el resultado obtenido por
Envi a la hora de encontrar los píxeles extremos. Debemos balancear el número de
iteraciones con respecto al tiempo disponible, ya que cada iteración lleva una
cantidad de tiempo asociada, dependiente del la CPU y la carga del sistema.
Típicamente, miles de iteraciones son requeridas para el tratamiento de datos de
imágenes hiperespectrales.
El siguiente paso consiste en seleccionar el factor de umbral que queremos
aplicar al PPI. Por ejemplo, un umbral de 2 marca todos los píxeles cuyo número de
veces de selección como píxel extremo haya sido 2 (teniendo en cuenta tanto los
mínimos como los máximos). Este umbral selecciona los píxeles en los finales del
vector proyectado. El umbral debería ser aproximadamente 2 ó 3 veces el nivel de
ruido en los datos. Por ejemplo, para datos TM, que típicamente tienen menos de 1
DN de ruido, un umbral de 2 ó 3 estaría bien. Cuando usamos datos MNF, que
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
49
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
normalizan el ruido, un DN es equivalente a una desviación estandar y, de nuevo, un
umbral de 2 ó 3 funciona bien. Umbrales más grandes hacen que el PPI encuentre
más píxeles extremos, con la desventaja de que estos serán menos propensos a ser
seleccionados como endmembers.
Para concluir el presente apartado, dedicado a describir la implementación del
algoritmo PPI disponible en ENVI, mostramos un ejemplo de utilización de dicho
algoritmo en el lenguaje de programación Interactive Data Language (IDL) en el que
fue desarrollado ENVI. El motivo de incluir esta descripción es facilitar la
comprensión de los parámetros involucrados en dicha implementación, los cuales
coinciden con los empleados en las versiones en C y en CUDA del mismo algoritmo
y que serán validados y comparados experimentalmente en el siguiente apartado de
la presente memoria. Las variables utilizadas en el código IDL que hace uso de la
función PPI_DOIT que contiene la implementación del algoritmo PPI en ENVI son
las siguientes:
•
DIMS: usa esta clave para especificar las dimensiones en que se ejecutan
las operaciones. DIMS es un vector de 5 elementos de tipo long int
con las siguientes definiciones:
o DIMS[0]: No se usa para esta function, puesta a -1.
o DIMS[1]: El píxel X inicial (el primer pixel es el 0).
o DIMS[2]: El píxel X final.
o DIMS[3]: El píxel Y inicial (el primer pixel es el 0).
o DIMS[4]: El píxel Y final.
•
FID: se usa para especificar el ID del archivo a abrir. Es el valor
retornado desde la palabra reservada D_FID en el procedimiento
ENVI_OPEN_FILE. FID es un “long int” con valor mayor que cero. Un
ID no válido es especificado como -1.
•
I_MEMORY: se usa para especificar que salida debe ser almacenada
en memoria. Si no está puesto ningún valor, la salida se almacenará en
disco.
•
ITERATIOS: usada para especificar el número total de iteraciones a
ejecutar. Si se está usando un PPI_DOIT como salida, entonces
especifica el número de iteraciones adicional que se ejecutarán.
50
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
•
OUT_BAME: usado para especificar un vector de tipo string para el
nombre de la banda de salida, si se desea.
•
OUT_AME: usado para especificar el nombre del archive de salida
para los datos resultado. Si IN_MEMORY está puesto, esta opción no es
necesaria.
•
P_FID: usado para especificar el ID de una archive para un archive de
salida previo desde el PPI_DOIT. Si no usa un archivo de un PPI_DOIT
previo, entonces P_FID debe ser puesto a -1.
•
POS: se usa para especificar un vector de 3 elementos de tipo long int
de posiciones de bandas. Los elementos de POS son emparejados con
elementos del vector FID.
•
PREV_ITER: usado para poner el número de iteraciones previo
ejecutado en los datos. Debe ser puesto a cero si los datos nos son
reiniciados en un ciclo de procesamiento previo.
•
PREV_DATA: se usa para especificar un vector de Total Pixel Counts
previo. Este dato se alamcena en una archivo desde la ejecución previa.
•
R_FID: se usa para especificar una variable llamada que contendrá el ID
del archivo desde el dato procesado. Este archivo ID puede ser usado para
acceder al dato procesado.
•
THRESH: se usa para indicar el valor umbral del algoritmo.
Teniendo en cuenta las variables anteriormente mencionadas, a continuación
mostramos un sencillo ejemplo de uso de la función PPI_DOIT que permite analizar
los parámetros de entrada y requerimientos del algoritmo PPI disponible en ENVI:
envi, /restore_base_save_files
envi_batch_init, log_file='batch.txt'
envi_open_file, 'imagen.bsq', r_fid=fid
if (fid eq -1) then envi_batch_exit
envi_file_query, fid, ns=ns, nl=nl, nb=nb
dims = [-1l, 0, ns-1, 0, nl-1]
pos = lindgen(nb)
out_name = 'testimg'
envi_doit,'ppi_doit',fid=fid, pos=pos, dims=dims,p_fid=-1,
iterations=10000, thresh=3.0, prev_iter=0, out_name=out_name,
r_fid=r_fid
envi_batch_exit
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
51
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
5. Análisis y discusión de resultados
En este capítulo presentamos una evaluación experimental de las diferentes versiones
del algoritmo PPI (implementado en C y en CUDA, y la versión disponible en ENVI)
desde el punto de vista de su precisión a la hora de detectar los píxels puros y
también desde el punto de vista de su rendimiento computacional. El apartado está
organizado de la siguiente forma. En primer lugar, describimos las imágenes
hiperespectrales simuladas y reales utilizadas en la validación experimental. A
continuación, se describen las caacterísticas de las GPUs usadas para comparar los
tiempos de ejecución del algoritmo paralelo. Finalmente, se realiza un exhaustivo
análisis y discusión comparativa de los resultados obtenidos al aplicar el PPI en
ENVI, su versión en C y su versión CUDA en dos generaciones de GPUs,
discutiendo dichos resultados y analizando la validez de la implementación en GPU
en base a la comparativa de la misma con respecto a las versiones en C y en ENVI.
5.1. Imágenes hiperespectrales utilizadas en el estudio
Con vistas a validar la precisión de las diferentes versiones del algoritmo PPI en la
tarea de identificar los píxels puros en imágenes hiperespectrales, hemos utilizado
tanto imágenes sintéticas como imágenes reales. Las pruebas con imágenes sintéticas
están orientadas a evaluar de forma preliminar el funcionamiento de la metodología
propuesta, estudiando el ajuste de parámetros y su impacto en el resultado final
obtenido. Por otra parte, el uso de imágenes reales permite establecer un estudio
comparativo del algoritmo propuesto con respecto a otros ya existentes de amplia
utilización por parte de la comunidad científica dedicada al análisis de imágenes
multi-dimensionales. A continuación, describimos la batería de imágenes empleada
en el estudio, distinguiendo entre imágenes sintéticas y reales.
5.1.1. Imágenes sintéticas
Las imágenes sintéticas permiten adoptar una forma objetiva a la hora de evaluar el
rendimiento de un algoritmo de análisis hiperespectral, ya que dichas imágenes se
52
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
generan de forma controlada y la información relativa al grado de pureza de cada
píxel puede controlarse a priori. Describimos a continuación el proceso de
generación de una imagen sintética mediante un sencillo ejemplo, detallando el
proceso de selección de firmas espectrales, la forma en que se establece la asignación
de abundancias y el esquema seguido para la generación de ruido.
En el ejemplo que nos ocupa, las firmas empleadas en la construcción de la
imagen simulada corresponden a una imagen obtenida por el sensor AVIRIS en 1997
sobre la región Jasper Ridge en California. La disponibilidad pública de esta imagen
en unidades de reflectancia resulta muy atractiva con objeto de crear imágenes
simuladas a partir de firmas espectrales reales. A continuación, se establece la
abundancia de cada una de las referencias elegidas en cada pixel de la imagen, de
forma que la contribución individual de cada firma se expresa mediante un conjunto
de coeficientes de abundancia que cumplen las restricciones de no-negatividad y
suma unitaria, propias del modelo lineal de mezcla. La última etapa en la simulación
consiste en añadir ruido a la imagen simulada. Nuestro proceso de simulación de
ruido en imágenes sintéticas se ha llevado a cabo utilizando un generador aleatorio
de números entre 1 y –1. Estos valores siguen un modelo de distribución de
probabilidad normal, con lo que su valor medio es 0 y su desviación estándar es 1. El
ruido se añade a cada pixel de la imagen en una determinada proporción que
determina la relación señal-ruido presente en la escena.
Una vez descrito el proceso de generación de imágenes sintéticas, pasamos a
describir las imágenes concretas que vamos a emplear en nuestro estudio. La primera
imagen simulada tiene dimensiones 100x100 pixels, y viene caracterizada por una
situación de mezcla entre componentes progresiva, a intervalos de abundancia muy
cortos. Como resultado, los cambios en la abundancia en las regiones que componen
esta imagen son muy sutiles. En total, hay 100 regiones de 1 pixel de ancho y 100
pixels de alto. La abundancia del componente suelo decrece de forma lineal de
izquierda a derecha, mientras que la abundancia del componente vegetación crece de
izquierda a derecha. La Figura 5.1 ilustra el proceso de construcción de esta imagen
sintética, que proporciona un conjunto de datos muy apropiado para analizar el
proceso de estimación de abundancias realizado por el algoritmo PPI. Este hecho se
debe a la situación de mezcla particular que se representa en la imagen.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
53
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
100
R1
Asignación de abundancias
R2
.................
100
Región
Suelo
Vegetación
Ri
1 – (i / 100)
i / 100
R99
R100
11
11
Figura 5.1: Regiones y asignación de abundancias para la primera imagen sintética.
Por otra parte, la Figura 5.2 muestra los mapas de abundancia empleados para
la generación de la primera imagen sintética utilizada en los experimentos, que
comprende mapas para dos endmembers simulados (vegetación y suelo). Conviene
destacar que la relación SNR en la imagen simulada (tras el proceso de simulación de
ruido) es de 110:1 (proporción de señal de 110 veces a 1 sobre el ruido) y el número
de bandas es de 224 (correspondiente a un espectro real de AVIRIS) comprendidas
entre 0.4 y 2.5 micrómetros,
con una nueva banda aproximadamente cada 10
nanómetros. El tamaño total de la imagen es de 4.27 MB.
0.0
0.2
0.4
0.6
0.8
1.0
100
100
a)
b)
Figura 5.2: Mapas de abundancia empleados en la generación de la primera imagen
sintética. a) Mapa de abundancia para el endmember suelo. b) Mapa de
abundancia para el endmember vegetación.
Finalmente, la Figura 5.3 muestra los mapas de abundancia empleados para la
generación de la segunda imagen sintética utilizada en los experimentos, que
54
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
comprende mapas para cinco endmembers simulados (cuatro tipos de vegetación y
suelo). De nuevo, la relación SNR en la imagen simulada (tras el proceso de
simulación de ruido) es de 110:1 y el número de bandas es de 224, comprendidas
entre 0.4 y 2.5 micrómetros. El tamaño total de la imagen es, de nuevo, de 4.27 MB.
100
r1
r2
r1, r2, r5
r2, r5
r1, r3, r5
r3, r5
r2
r2, r4, r5
r3, r4, r5
r3
r1
r5
a)
r3
100
r1, r5
r4, r5
r4
r4
r5
1.0
0.5
0.0
b)
c)
d)
e)
f)
Figura 5.3: Segunda imagen sintética. a) Distribución en la imagen de los cinco
píxels puros (endmembers), denotados como r1 , r2 , r3 , r4 y r5 . b-f) Mapas de
abundancia empleados en la generación de la segunda imagen sintética.
5.1.2. Imagen real
La imagen real seleccionada para validar el algoritmo PPI en el presente trabajo fue
obtenida por el sensor AVIRIS sobre la región Indian Pines, Indiana, en el año 1992.
La imagen consta de 145x145 pixels de 17 metros, cada uno de los cuales contiene
220 valores de radiancia en el rango 0.4 a 2.5 µm. Los valores de la relación SNR en
los diferentes canales del sensor AVIRIS en el año en que se tomó la imagen han
sido mostrados con anterioridad en la Figura 2.3. Como puede apreciarse en dicha
figura, esta imagen representa un caso de estudio en que el la relación SNR resulta
desfavorable. La Figura 5.4 muestra una banda concreta de la imagen junto con sus
clases de verdad terreno asociadas. Esta información ha sido hecha pública a la
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
55
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
comunidad
científica
(http://cobweb.ecn.purdue.edu/~biehl/MultiSpec/).
Como
puede apreciarse en la Figura 5.4, la mayor parte de la escena está constituida por
cultivos agrícolas (soja y maíz), bosques y otros tipos de vegetación. Conviene
destacar que, en imágenes reales no resulta tan sencillo realizar la estimación de los
píxeles puros, ya que esta imagen está formada por píxels con resolución espacial de
17 metros, lo cual hace pensar que la mayor parte de los píxels en la escena serán
píxels mezcla. En cualquier caso, consideramos interesante realizar un estudio
preliminar de la posibilidad de detectar los píxels más puros presentes en la imagen
real.
Figura 5.5: Imagen hiperespectral real obtenida por AVIRIS sobre la región Indian
Pines en Indiana, Estados Unidos, con las clases verdad-terreno superimpuestas.
5.2. Arquitecturas GPU empleadas en el estudio
Las características de los dos modelos de GPUs empleados en el estudio (NVidia
GeForce 8600 GT y NVidia GeForce 8800 GTX) aparecen comparadas en la Tabla
5.1. Como podemos observar, la GeForce 8800 GTX posee unas características
mucho más elevadas que la 8600 GT, ya que esta última es una GPU de gama baja.
Estas características serán decisivas en los resultados de nuestra aplicación, como
podremos ver en la siguiente sección. Por otra parte, la Tabla 5.2 compara las
características de las dos CPUs respectivamente utilizadas con cada tarjeta. Por
razones ilustrativas, destacamos que la versión del software ENVI utilizada en los
experimentos ha sido la 4.2. Finalmente, la versión del compilador utilizada para el
desarrollo de los experimentos es el Microsoft Visual Studio .Net 2005.
56
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
GPU
8600 GT
8800 GTX
Procesadores tipo "stream"
32
128
Reloj central (MHz)
540
575
Reloj de las unidades de sombreado (MHz)
180
1350
Reloj de la Memoria (MHz)
700
900
256MB GDDR3
768MB GDDR3
128-bit
384-bit
22.4
86.4
8.6
36.8
Memoria
Interfaz de Memoria
Ancho de banda de Memoria (GB/s)
Tasa de relleno
millones/s)
de
texturas
(miles
de
Tabla 5.1: Comparativa de características de GPUs GeForce 8600 GT y 8800 GTX.
CPU
Core 2 Quad
Core 2 Duo
4
2
2 GB
2 GB
2.40 GHz
2.40 GHz
Nº de procesadores
Memoria RAM
Frecuencia de CPU
Tabla 5.2: Comparativa de características CPUs empleadas en los experimentos.
5.3. Estudio experimental
El presente apartado se organiza de la siguiente forma. En un primer experimento,
nos centramos en los resultados relativos a la precisión de las diferentes versiones del
algoritmo PPI consideradas (ENVI, C y CUDA) a la hora de identificar los píxels
puros en las imágenes simuladas. En un segundo experimento, analizamos la
precisión de los algoritmos considerados a la hora de identificar los píxels puros en la
imagen real. Finalmente, en un tercer experimento analizamos el rendimiento
computacional de los algoritmos desarrollados en las diferentes arquitecturas CPU y
GPU consideradas, estableciendo comparativas entre las versiones paralelas y serie
en términos del rendimiento computacional y speedup entre dichas versiones.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
57
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
5.3.1. Primer experimento: análisis precisión (imágenes sintéticas)
En este experimento analizamos la precisión obtenida en la tarea de detectar los
píxels puros en las imágenes sintéticas por las tres versiones del algoritmo PPI, con
vistas a evaluar si la versión en GPU (desarrollada en CUDA) proporciona resultados
aceptables con respecto a las versiones C y ENVI.
Con vistas a comparar de forma cuantitativa los resultados, utilizamos una
medida de acierto que denominamos ratio de acierto. Esta medida está basada en que
en las imágenes sintéticas conocemos a priori la ubicación de los píxels puros. Por
ello, podemos cuantificar, para cada proyección aleatoria generada por una
determinada versión del algoritmo PPI, si dicha proyección resulta en la selección de
un píxel totalmente puro, en cuyo caso incrementamos un contador de acierto
(inicializado al valor 0) en una unidad. En caso contrario, el contador permanece
inalterado. Al final del proceso, el ratio de acierto viene dado por el cociente entre el
valor del contador de acierto y el número de proyecciones realizadas. También
hemos considerado un ratio de acierto alternativo que pretende evaluar el proceso de
identificación de proyecciones de forma un poco más detallada. La idea es la
siguiente: dado que en las imágenes sintéticas se conoce el grado de pureza de cada
píxel, puesto que las abundancias a nivel píxel han sido generadas de forma
controlada, en el caso de que una determinada proyección no proporcione un píxel
totalmente puro, es posible estudiar el grado de pureza del píxel seleccionado. Por
ejemplo, tomando como ejemplo la primera imagen simulada, si una proyección
selecciona un píxel en la segunda columna situada desde la parte izquierda de la
imagen, es claro que dicha proyección no ha proporcionado un píxel totalmente puro
ya que dichos píxels se encuentran ubicados en la primera y última columnas de la
imagen. Sin embargo, en este caso la proyección habría seleccionado un píxel casi
puro, con una fracción de abundancia de 0.99 (sobre 1.0) para un endmember y 0.01
(sobre 1.0) para el otro, por lo que el resultado está muy cerca de lo que cabría
esperar. No obstante, si una determinada proyección selecciona un píxel en la
columna central de la misma imagen, en este caso podemos decir que la proyección
ha dado como resultado un píxel mezcla, con fracción de abundancia de 0.5 (sobre
1.0) para un endmember y de 0.5 (sobre 1.0) para el otro. Por tanto, en este caso la
proyección no resulta tan adecuada como en el caso anterior (segunda columna).
58
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Con vistas a incorporar este aspecto en la evaluación cuantitativa de los
algoritmos, proponemos la utilización de un ratio de acierto modificado en el que el
contador de acierto no solamente se incrementa en una unidad, como era el caso en el
ratio de acierto original, sino que puede incrementarse en fracciones de una unidad
dependiendo del grado de pureza del píxel seleccionado en la proyección. Así, si el
píxel seleccionado es totalmente puro (por ejemplo, un píxel en la columna situada
más a la izquierda en la primera imagen simulada), el contador de acierto se
incrementa en una unidad. Si el píxel seleccionado es totalmente mezcla (por
ejemplo, un píxel en la columna situada en el centro de la primera imagen simulada),
el contador de acierto no se incrementa. Finalmente, si el píxel seleccionado no es
totalmente puro ni totalmente mezcla (por ejemplo, un píxel en la segunda columna
situada desde la parte izquierda de la primera imagen simulada) el contador de
pureza se incrementa de forma proporcional a la pureza del píxel, que se considera
comprendida entre los dos casos extremos anteriormente mencionados (incremento
en una unidad para un píxel puro e incremento en cero unidades para un píxel
mezcla). De esta forma, podemos cuantificar de forma más precisa el funcionamiento
del algoritmo sin restringir nuestro análisis a la selección de píxels exclusivamente
puros.
Teniendo en cuenta este esquema de validación, la Figura 5.6 muestra las
imágenes de pureza (en escala de grises) proporcionadas para las versiones ENVI, C
y CUDA del algoritmo PPI, para distinto número de proyecciones (1000 y 10000).
Conviene destacar que las versiones C y CUDA siempre proporcionan exactamente
los mismos resultados puesto que la versión CUDA se obtiene a partir de la versión
C. Asimismo, sólo se muestran los resultados de la versión GPU GeForce 8800, ya
que los resultados de las versiones ejecutadas en las CPUs y en la GeForce 8600 GT
coinciden con los de dicha GPU. En la Figura 5.6, los píxels con mayor valor de
intensidad han sido seleccionados un mayor número de veces, mientras que los píxels
en negro no han sido nunca seleccionados. Como puede apreciarse, en ambos casos
(versión ENVI y versión C/CUDA) la selección de píxels puros se concentra en las
columnas primera y última de la imagen simulada, indicando que las diferentes
versiones del algoritmo tienden a concentrar sus selecciones en las columnas que
contienen los píxels puros de la imagen.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
59
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Iteraciones
1000
10000
Versión EVI
Versión C/CUDA
Figura 5.6: Imágenes con el índice de pureza calculado para cada píxel por las
versiones ENVI, C (en las dos CPUs consideradas) y CUDA (en las dos GPUs
consideradas) para la primera imagen simulada.
Un aspecto destacable en relación a los resultados presentados en la Figura
5.6 es el hecho de que, como puede apreciarse, la selección de píxels en ambos casos
no es idéntica. Esto se debe a que la versión ENVI utiliza un proceso de selección
basado en una distribución de probabilidad a la hora de generar los vectores
aleatorios que no es conocida (dado el carácter propietario del software) y también al
hecho de que ENVI aplica un proceso (denominado Fast PPI) para incrementar el
número de píxels que se seleccionan en cada proyección como puros. En la
descripción original del algoritmo [9], los autores indican que para cada proyección
el máximo de píxels etiquetados es de 2 (los píxels que resultan en los valores de
proyección máxima y mínima). No obstante, en la versión Fast PPI de ENVI el
número de píxels seleccionados depende de un valor umbral, lo cual hace que para
un mismo número de proyecciones dicha versión seleccione muchos más candidatos.
Este efecto se ilustra gráficamente en la Figura 5.7, en la que se muestran los píxels
que han sido seleccionados al menos una vez por las versiones ENVI y C/GPU del
algoritmo PPI.
60
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Iteraciones
1000
10000
Versión EVI
Versión C/CUDA
Figura 5.7: Imágenes indicando los píxels que han sido seleccionados al menos una
vez como puros por las versiones ENVI, C (en las dos CPUs consideradas) y CUDA
(en las dos GPUs consideradas) para la primera imagen simulada.
Como puede apreciarse en la Figura 5.7, si bien la versión ENVI del
algoritmo PPI resulta en un mayor número de píxels seleccionados para el mismo
número de proyecciones, es claro que muchas de las selecciones se encuentran
ubicadas en columnas centrales (y por tanto, menos puras) de la primera imagen
simulada. Por otra parte, la versión C/GPU presenta resultados más centrados en las
zonas izquierda y derecha de la imagen, lo cual sugiere que las proyecciones
realizadas pueden ser más efectivas ya que solamente los píxels realmente extremos
son seleccionados, mientras que en la versión ENVI no solamente los extremos, sino
también aquellos píxels que están cercanos a los valores de proyección extremos
(según un determinado valor umbral aplicado como parámetro de entrada) son
marcados como extremos durante el proceso. Con vistas a ofrecer una medida
cuantitativa acerca de la precisión en el proceso de selección de píxels puros, la
Figura 5.8 muestra el ratio de acierto modificado para la versión GPU del algoritmo
PPI con distintos números de iteraciones.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
61
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Ratio
Ratio de Acierto PPI GPU en
CS1_RAD_SNR110.bsq
1
0,8
0,6
0,4
0,2
0
1000
10000
Iteraciones
Figura 5.8: Ratio de acierto modificado para la versión GPU del algoritmo PPI,
aplicado sobre la primera imagen simulada, con distintos números de iteraciones.
Como puede apreciarse en la Figura 5.8, el ratio de acierto para la versión
GPU del algoritmo PPI es de aproximadamente 0.92 (sobre 1.0), manteniéndose
estable para diferentes números de iteraciones. Este resultado indica que la precisión
de la versión GPU del algoritmo PPI a la hora de seleccionar los píxels puros de la
imagen es bastante alta. Aún teniendo presente que muchas proyecciones (por su
carácter aleatorio) no pueden seleccionar los píxels más extremos, la mayor parte de
dichas proyecciones consiguen seleccionar los píxels más puros disponibles.
También es importante destacar que los ratios de acierto modificados para la versión
ENVI no pueden ser obtenidos dado el carácter propietario del software, que impide
analizar este hecho de forma cuantitativa dado que no se puede acceder al código del
algoritmo. No obstante, los resultados mostrados visualmente en la Figura 5.7 nos
permiten anticipar que la versión ENVI da como resultado muchas más selecciones
en zonas de la imagen con alta presencia de píxels no puros, y por tanto pensamos
que el ratio de acierto modificado de la versión ENVI puede ser más bajo que el
valor de 0.92 (sobre 1.0) obtenido por la versión en GPU.
A continuación, repetimos el proceso de evaluación para la segunda imagen
simulada, teniendo en cuenta que esta imagen presenta un mayor grado de dificultad
ya que el número de endmembers aumenta pero el número total de píxels puros
disminuye. Mientras que en la primera imagen simulada había un total de 200 píxels
puros, 100 de ellos ubicados en la primera columna y 100 de ellos en la última
columna, en la segunda imagen simulada el número de píxels puros se limita a 5 (uno
en cada esquina y uno en el centro) lo cual a priori reduce las posibilidades de
62
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
identificar dichos píxels con respecto al caso anterior, y más si tenemos en cuenta
que el tamaño de las imágenes es exactamente igual (100x100 píxels) con lo que el
ratio de píxels puros frente al total de píxels de la imagen es mucho menor para la
segunda imagen simulada.
Iteraciones
1000
10000
Versión EVI
Versión C/CUDA
Figura 5.9: Imágenes con el índice de pureza calculado para cada píxel por las
versiones ENVI, C (en las dos CPUs consideradas) y CUDA (en las dos GPUs
consideradas) para la segunda imagen simulada.
Teniendo en cuenta el esquema de validación aplicado para la primera imagen
simulada, la Figura 5.9 muestra las imágenes de pureza (en escala de grises)
proporcionadas para las versiones ENVI, C y CUDA del algoritmo PPI, para distinto
número de proyecciones (1000 y 10000). De nuevo, las versiones C y CUDA
proporcionan exactamente los mismos resultados. Asimismo, sólo se muestran los
resultados de la versión GPU GeForce 8800, ya que los resultados de las versiones
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
63
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
ejecutadas en las CPUs y en la GeForce 8600 GT de nuevo coinciden con los de
dicha GPU. Como puede apreciarse, en ambos casos (versión ENVI y versión
C/CUDA) la selección de píxels puros se concentra en las esquinas y en el centro de
la imagen simulada, indicando que las diferentes versiones del algoritmo tienden a
concentrar sus selecciones alrededor de las ubicaciones que contienen los píxels
puros de la imagen.
Iteraciones
1000
10000
Versión EVI
Versión C/CUDA
Figura 5.10: Imágenes indicando los píxels que han sido seleccionados al menos una
vez como puros por las versiones ENVI, C (en las dos CPUs consideradas) y CUDA
(en las dos GPUs consideradas) para la segunda imagen simulada.
Ante la similitud aparente de los resultados mostrados en la Figura 5.9 y, al
igual que en el experimento anterior, la Figura 5.10 muestra los píxels que han sido
seleccionados al menos una vez por las versiones ENVI y C/GPU del algoritmo PPI
en la segunda imagen simulada. De nuevo puede apreciarse en la Figura 5.10 que, si
bien la versión ENVI del algoritmo PPI resulta en un mayor número de píxels
seleccionados para el mismo número de proyecciones, es claro que muchas de las
selecciones se encuentran ubicadas en zonas no cercanas a las esquinas y al centro (y
por tanto, menos puras) de la segunda imagen simulada. Por otra parte, la versión
64
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
C/GPU presenta resultados más centrados en dichas zonas, lo cual de nuevo sugiere
que las proyecciones realizadas pueden ser más efectivas. La Figura 5.11 muestra el
ratio de acierto modificado para la versión GPU del algoritmo PPI con distintos
números de iteraciones. Como puede apreciarse en la Figura 5.11, el ratio de acierto
para la versión GPU del algoritmo PPI es de aproximadamente 0.99 (sobre 1.0),
manteniéndose estable para diferentes números de iteraciones. Este resultado indica
que la precisión de la versión GPU del algoritmo PPI a la hora de seleccionar los
píxels puros de la segunda imagen simulada es muy elevada. De nuevo, los
resultados mostrados visualmente en la Figura 5.10 nos permiten anticipar que la
versión ENVI da como resultado muchas más selecciones en zonas de la imagen con
alta presencia de píxels no puros, y por tanto pensamos que el ratio de acierto
modificado de la versión ENVI puede ser más bajo que el valor de 0.99 (sobre 1.0)
obtenido por la versión en GPU.
Ratio de Acierto PPI GPU CS2_RAD_SNR110.bsq
1
Ratio
0,8
0,6
0,4
0,2
0
1000
10000
Iteraciones
Figura 5.11: Ratio de acierto modificado para la versión GPU del algoritmo PPI,
aplicado sobre la segunda imagen simulada, con distintos números de iteraciones.
5.3.2. Segundo experimento: análisis precisión (imagen real)
En este experimento, procuramos repetir los mismos pasos realizados para imágenes
sintéticas. La Figura 5.12 muestra las imágenes de pureza (en escala de grises)
proporcionadas para las versiones ENVI, C y CUDA del algoritmo PPI, para distinto
número de proyecciones (1000 y 10000) obtenidas al aplicar el algoritmo sobre la
imagen real de Indian Pines. De nuevo, las versiones C y CUDA proporcionan
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
65
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
exactamente los mismos resultados y sólo se muestran los resultados de la versión
GPU GeForce 8800, ya que los resultados de las versiones ejecutadas en las CPUs y
en la GeForce 8600 GT de nuevo coinciden con los de dicha GPU. Como puede
apreciarse, en ambos casos (versión ENVI y versión C/CUDA) la selección de píxels
puros se concentra en una serie de zonas determinadas de la imagen. Si comparamos
dichas zonas con la verdad terreno para la imagen Indian Pines, mostrada en la
Figura 5.5, podemos apreciar que no existe correlación entre las zonas etiquetadas en
la verdad terreno y la presencia de píxels puros. Es más, los píxels puros parecen
concetrarse en determinadas zonas muy localizadas de la imangen. Este hecho puede
deberse a la escasa presencia de píxels puros en la imagen, debido a la escasa
cobertura del suelo de los cultivos agrícolas presentes en la imagen (en etapa muy
temprana de crecimiento y con una cobertura aproximada del suelo del 5%). De este
modo, los resultados extraídos permiten anticipar que las zonas puras de suelo han
sido favorecidas durante el proceso de selección de extremos, y no existe una forma
intuitiva de establecer una correlación entre las zonas seleccionadas por el algoritmo
PPI y la información verdad terreno disponible a priori.
Iteraciones
1000
10000
Versión Envi
Versión C/CUDA
Figura 5.12: Imágenes con el índice de pureza calculado para cada píxel por las
versiones ENVI, C (en las dos CPUs consideradas) y CUDA (en las dos GPUs
consideradas) para la imagen real.
66
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Teniendo presente esta circunstancia y la dificultad de evaluar el rendimiento
del algoritmo con la imagen real, dada la escasa información disponible a priori
acerca de la ubicación de los píxels puros, hemos optado por retrasar la toma de
decisiones significativas en base a los experimentos con imágenes reales a un futuro
estudio, supeditado a la disponibilidad de información más detallada sobre la
ubicación de píxels puros en dichas imágenes. En este sentido, consideramos que el
estudio realizado con imágenes simuladas resulta suficiente para obtener una idea
precisa acerca del rendimiento de la versión GPU desarrollada, en particular, dada la
disponibilidad de información verdad terreno de calidad acerca de la pureza de los
píxels considerados, la cual está disponible gracias al proceso controlado que se ha
seguido a la hora de simular dichas imágenes.
5.3.3. Tercer experimento: análisis de rendimiento
En este experimento analizamos el rendimiento computacional de las diferentes
implementaciones consideradas. En primer lugar comparamos los tiempos de unas
ejecuciones con respecto a otras para, a continuación, mostrar los speedups
(incrementos de rendimiento) obtenidos para las versiones GPUs en función del
tiempo de ejecución medido en la CPU y en la GPUs.
La Figura 5.13 muestra los tiempos de ejecución obtenidos en el
procesamiento de la primera imagen simulada por parte de las diferentes
implementaciones del algoritmo PPI. Es preciso destacar que todas las
implementaciones utilizan exactamente la misma configuración en cuanto a los
parámetros de entrada del algoritmo, adoptando el mayor número de iteraciones
consideradas en los experimentos con la primera imagen simulada y un valor umbral
de 5. En concreto, las implementaciones que se han evaluado en este estudio
experimental acerca del rendimiento son las siguientes:
• Versión ENVI del algoritmo PPI.
• Versión C del algoritmo PPI implementada en una CPU Core 2 Quad.
• Versión C del algoritmo PPI implementada en una CPU Core 2 Duo.
• Versión CUDA del algoritmo PPI implementada en una GPU 8600 GT.
• Versión CUDA del algoritmo PPI implementada en una GPU 8800 GTX.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
67
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Tiempos de Ejecución CS1_RAD_SNR110.bsq
350
Segundos
300
250
GPU 8800 GTX
200
Envi
GPU 8600 GT
150
CPU Core 2 Quad
CPU Core 2 Duo
100
50
0
1000
5000
10000
15000
Nº de Iteraciones
Figura 5.13: Tiempos de ejecución obtenidos por las diferentes versiones del
algoritmo PPI con la primera imagen simulada.
Como podemos observar en la Figura 5.13, a medida que el número de
iteraciones aumenta, los tiempos obtenidos aumentan de forma lineal. Para un
número moderado de iteraciones, los mejores tiempos son siempre obtenidos por la
versión en la GPU GeForce 8800 GTX, seguido del tiempo obtenido por ENVI y la
GPU 8600 GT. Los peores resultados de tiempo los producen las CPUs, como era
previsible, siendo del orden de 3 veces más lentas que la mejor versión en la GPU.
Conviene destacar que los buenos resultados obtenidos por la versión ENVI parecen
deberse a un proceso de optimización interno aplicado por el software que no
podemos evaluar dado el carácter propietario del mismo. Sin embargo, la Figura 5.14
revela que el speedup obtenido por la versión GPU GeForce 8800 GTX con respecto
a las dos CPUs consideradas está siempre en torno a 3, indicando que se ha podido
acelerar el rendimiento del algoritmo de forma significativa con respecto a la versión
serie. También resulta destacable el hecho de que los speedups obtenidos por la
versión desarrollada en la GPU no sean tan significativos, lo cual indica que la
tecnología CUDA está específicamente adaptada para tarjetas de la gama 8800 o
superior, mientras que generaciones anteriores de GPUs no pueden obtener
beneficios significativos de esta tecnología, de reciente creación, y optimizada para
tarjetas NVidia de gama superior.
68
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Speed-up GPUs vs Core 2 Quad CS1_RAD_SNR110.bsq
T_Core / T_GPU
3
2 ,5
2
GPU 8800 GTX
1,5
GPU 8600 GT
1
0 ,5
0
10 0 0
5000
10 0 0 0
15 0 0 0
Nº de Iteraciones
Speed-up GPUs vs Core 2 Duo CS1_RAD_SNR110.bsq
T_Core / T_GPU
3
2 ,5
2
GPU 8800 GTX
1,5
GPU 8600 GT
1
0 ,5
0
10 0 0
5000
10 0 0 0
15 0 0 0
Nº de Iteraciones
Figura 5.14: Speedup (tiempo de la versión CPU dividido por el tiempo de la
versión GPU) obtenido por la implementación en la GPU 8800 GTX con
respecto a las implementaciones en la CPU Core 2 Quad (parte superior) y en la
CPU Core 2 Duo (parte inferior) para la primera imagen simulada.
Como podemos comprobar en la Figura 5.14, los speedups obtenidos por
parte de la GPU 8800 GTX son estables con respecto al número de iteraciones
aplicadas por el algoritmo y también con respecto al modelo de CPU considerado.
Por su parte, la Figura 5.15 muestra los tiempos de ejecución obtenidos en el
procesamiento de la segunda imagen simulada por parte de las diferentes
implementaciones del algoritmo PPI. Como cabría esperar, dado que las dimensiones
de la segunda imagen son idénticas a las de la primera a pesar de que esta imagen
sintética es más compleja, ya que contiene un mayor número de endmembers, ese
factor no influye en el tiempo de ejecución del algoritmo. Los resultados obtenidos
son similares a los del anterior experimento. Finalmente, la Figura 5.16 muestra los
resultados en base a los valores de speedup, que se mantienen estables con respecto a
las dos versiones de CPU.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
69
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Tiempos de Ejecución CS2_RAD_SNR110.bsq
35 0
30 0
25 0
s
o 20 0
d
n
u
g 15 0
e
S10 0
GP U 8800 GTX
E nvi
GP U 8600 GT
CP U Core 2 Quad
CP U Core 2 Duo
50
0
1 000
50 00
10 000
150 00
Nº de Ite ra ciones
Figura 5.15: Tiempos de ejecución obtenidos por las diferentes versiones del
algoritmo PPI con la segunda imagen simulada.
Speed-up GPUs vs Core 2 Quad CS2_RAD_SNR110.bsq
T_Core / T_GPU
3
2 ,5
2
GPU 8800 GTX
1,5
GPU 8600 GT
1
0 ,5
0
10 0 0
5000
10 0 0 0
15 0 0 0
Nº de Iteraciones
Speed-up GPUs vs Core 2 Duo CS2_RAD_SNR110.bsq
T_Core / T_GPU
3
2 ,5
2
GPU 8800 GTX
1,5
GPU 8600 GT
1
0 ,5
0
10 0 0
5000
10 0 0 0
15 0 0 0
Nº de Iteraciones
Figura 5.16: Speedup (tiempo de la versión CPU dividido por el tiempo de la
versión GPU) obtenido por la implementación en la GPU 8800 GTX con
respecto a las implementaciones en la CPU Core 2 Quad (parte superior) y en la
CPU Core 2 Duo (parte inferior) para la segunda imagen simulada.
70
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Finalmente, mostramos los resultados de rendimiento obtenidos con la
imagen real. Esta imagen es la más compleja de todas, ya que los endmembers son
difíciles de estimar y encontrar, ya que la imagen está formada por una gran variedad
de clases diferentes de imágenes, como se explicó en el punto anterior de esta
sección. La Figura 5.17 muestra los tiempos de ejecución obtenidos, que revelan una
diferencia sustancial en cuanto al rendimiento computacional ofrecido por la GPU
8800 GTX con respecto al resto de implementaciones. Mientras que los demás
siguen manteniendo una diferencia más o menos similar con respecto a los casos
anteriores (imágenes simuladas), en el experimento con imagen real esta GPU parece
actuar más rápido, produciendo una diferencia de algo más del doble de rapidez con
respecto a la segunda mejor ejecución, la de ENVI, y es más de tres veces más rápida
que las versiones CPU en este experimento.
Tiempos de Ejecución Purdue.bsq
700
Segundos
600
500
GPU 8800 GTX
400
Envi
GPU 8600 GT
300
CPU Core 2 Quad
CPU Core 2 Duo
200
100
0
1000
5000
10000
15000
Nº de Iteraciones
Figura 5.17: Tiempos de ejecución obtenidos por las diferentes versiones del
algoritmo PPI con la imagen real.
Este efecto también se aprecia en los resultados de speedup mostrados en la
Figura 5.18, en las que las que se aprecia cómo la versión en la GPU 8800 GTX es
más de tres veces más rápida que la versión en las CPUs. A pesar del incremento de
rendimiento obtenido en los experimentos, pensamos que los resultados de speedup
son moderados y que dichos resultados pueden mejorarse de forma sustancial en
futuras implementaciones del algoritmo, en las que el código CUDA deberá
modificarse para aprovechar mejor los recursos hardware disponibles en la GPU.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
71
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Speed-up GPUs vs Core 2 Quad Purdue.bsq
T_Core / T_GPU
3 ,5
3
2 ,5
2
GPU 8800 GTX
GPU 8600 GT
1,5
1
0 ,5
0
10 0 0
5000
10 0 0 0
15 0 0 0
Nº de Iteraciones
Speed-up GPUs vs Core 2 Duo Purdue.bsq
T_Core / T_GPU
3 ,5
3
2 ,5
2
GPU 8800 GTX
GPU 8600 GT
1,5
1
0 ,5
0
10 0 0
5000
10 0 0 0
15 0 0 0
Nº de Iteraciones
Figura 5.18: Speedup (tiempo de la versión CPU dividido por el tiempo de la
versión GPU) obtenido por la implementación en la GPU 8800 GTX con
respecto a las implementaciones en la CPU Core 2 Quad (parte superior) y en la
CPU Core 2 Duo (parte inferior) para la imagen real.
5.3.4. Discusión global de resultados
Una vez presentados los resultados obtenidos en nuestro estudio experimental,
procedemos a discutirlos de forma global con carácter previo a la presentación de las
principales conclusiones extraídas a partir de la realización del presente estudio, las
cuales serán descritas en el siguiente capítulo de la memoria.
Con respecto a los resultados de precisión, conviene destacar que las
imágenes obtenidas como resultado de ejecutar nuestra versión de PPI no parecen, a
simple vista, ofrecer tanta información como la que ofrecen los resultados de ENVI.
No obstante, como se ha comentado a la hora de presentar dichos resultados,
pensamos que el principal motivo de este hecho es que la versión ENVI utiliza un
criterio modificado a la hora de aplicar el valor umbral para el algoritmo. En nuestra
72
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
implementación, un valor de umbral alto resulta en pocos píxeles escogidos como
píxeles extremos, ya que nuestro criterio de umbral se basa en coger todos los píxeles
que superen dicho umbral. Por otra parte, en la versión ENVI un valor de umbral alto
resulta en muchos píxels seleccionados, ya que en ENVI se toma el máximo y el
mínimo, así como todos los píxeles que esten a distancia umbral de dichos valores en
cada iteración. Esto provoca que mientras que en una iteración de nuestra versión
sólo escogemos dos píxeles extremos, ENVI puede llegar a seleccionar decenas de
ellos. Sin embargo, este enfoque puede no dar resultados más precisos en cuanto a la
eficacia a la hora de seleccionar los píxels puros, como hemos destacado en el
estudio. En este sentido, cabe destacar que nuestras versiones de PPI quizás
seleccionan menos píxeles extremos de las imágenes; sin embargo, los píxeles que
son marcados, tienen una altísima probabilidad de que sean píxeles extremos. Esto
aparece reflejado en los valores de ratio de acierto modificados mostrados en nuestro
estudio experimental, los cuales por ejemplo para la segunda imagen simulada rozan
la perfección. Como trabajo futuro, se recomienda hacer una comparativa de los
ratios obtenidos por nuestras implementaciones con respecto a los obtenidos por la
versión ENVI. En este estudio, sin embargo, dicho análisis no fue posible debido al
carácter propietario del software ENVI.
Con respecto a los resultados de rendimiento computacional, en todos los
experimentos realizados se puede apreciar una clara mejora de tiempo de la
implementación en la GPU GeForce 8800 GTX con respecto al resto de versiones.
Con esto, queda probada la eficacia de la GPU frente a otros tipos de ejecuciones,
con lo que podemos optar por hacer uso de la misma para estos tipos de cálculos, sin
miedo a obtener peores resultados de tiempo. Sin embargo, si nos fijamos en los
resultados proporcionados por la otra GPU, la GeForce 8600 GT, vemos que los
resultados obtenidos son peores, a pesar de seguir siendo algo más rápida que las
ejecuciones por CPU, independientemente de que la tecnología CUDA esté
optimizada para tarjetas de gama alta (8800 y superior). Esto indica que la selección
de la tarjeta a utilizar será clave en nuestra aplicación y que, en líneas generales,
debemos hacer uso de tarjetas de gama alta, que tienen un coste más elevado que el
habitual, pero que a cambio nos ofrecen unos resultados superiores.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
73
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
Otra observación relevante a partir del estudio se refiere a los resultados
obtenidos por las implementaciones realizadas en las dos CPUs consideradas. El
tiempo de ejecución obtenido en ambos es prácticamente el mismo, cuando lo que
todos esperaríamos realmente, es que los resultados obtenidos con el procesador
Core 2 Quad fueran mucho más rápidos que los del Core 2 Duo. La explicación a
este hecho se basa en la siguiente observación: para que un procesador Core 2 Quad
alcance su máximo rendimiento, debe tener acivada por parte del administrador del
equipo la opción Core Multiplexing Technology que nos permite ejecutar CPUs multi
núcleo como si fuese una sola, y le permite ejecutar hilos de procesamiento en
paralelo. Mientras esto no se haga, o el sistema operativo no sea compatible al 100%
con este tipo de procesadores, entonces no podemos realmente optimizar este aspecto
y obtendremos resultados similares a los mostrados en este estudio.
Con respecto a los resultados de speedups, si bien es cierto que los resultados
obtenidos son adecuados, pensamos que dichos resultados pueden mejorarse en
futuros estudios mediante una optimización del código desarrollado en CUDA. Por
otra parte, nuestros experimentos también indican que la GPU 8800 GTX tiene unas
prestaciones claramente superiores a las de las 8600 GT. Como ya hemos visto, la
8800 GTX posee 128 procesadores de flujo frente a los 32 de la 8600 GT, es decir, 4
veces más. Esto podría hacernos llegar a pensar que por este hecho, los resultados de
la primera GPU deberían ser del orden de 4 veces más rápidos; sin embargo,
debemos darnos cuenta de que la velocidad de trabajo de la tarjeta no sólo recae en
este parámetro, sino en él también influyen el resto de parámetros indicados en el
primer punto de esta sección, y particularmente en parámetros como el reloj central,
el reloj de la memoria o la interfaz de memoria. Este hecho justifica la diferencia en
velocidad en torno a 3 órdenes de magnitud en lugar de 4 como cabría esperar al
comparar ambas tarjetas, las cuales pertenecen a generaciones diferentes.
Precisamente, este hecho permite anticipar mejoras sustanciales con las nuevas
generaciones de GPUs.
74
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
6. Conclusiones y líneas futuras de trabajo
En la presente memoria se realizado un estudio comparativo de diferentes
alternativas para implementar el algoritmo PPI, ampliamente utilizado en la
comunidad científica dedicada al análisis de imágenes hiperespectrales obtenidas por
sensores remotos de observación de la tierra. En concreto, se han desarrollado nuevas
implementaciones GPU del algoritmo utilizando tarjetas NVidia de diferentes
generaciones (GeForce 8800 GTX y GeForce 8600 GT), las cuales integran una
nueva arquitectura CUDA que ofrece una nueva vía de trabajo para desarrollar
cálculos científicos de forma eficiente utilizando la tarjeta gráfica como un
coprocesador. En virtud de los resultados experimentales presentados en el estudio,
las principales aportaciones del presente trabajo pueden resumirse a continuación:
• Después de analizar los resultados del estudio comparativo realizado,
podemos concluir que la mejor solución con respecto al tiempo de
procesamiento es la ofrecida por la GPU GeForce 8800 GTX. Por otra
parte, los reultados sensiblemente inferiores proporcionados por la
GPU GeForce 8600 GT permiten anticipar que los resultados
obtenidos dependem en gran parte de la potencia de la GPU y las
características de la misma, ya que los resultados obtenidos con una
GPU perteneciente a una generación anterior no resultan del todo
satisfactorios.
• En cuanto a los resultados de precisión, podemos concluir que los
resultados proporcionados por las versiones GPU desarrolladas son
comparables a los proporcionados por la versión original (ENVI) del
algoritmo, con similares prestaciones en cuanto a la selección de
píxels puros y con un menor ratio de píxels mezcla seleccionados
durante el proceso, lo cual resulta del mecanismo de optimización
aplicado por la versión ENVI que incrementa el número de píxels
seleccionados durante el proceso pero no necesariamente su pureza.
• Conviene destacar, llegados a este punto, las ventajas económicas que
la implementación GPU ofrece con respecto a otras soluciones
paralelas como las basadas en clusters de computadores. En concreto,
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
75
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
mientras que el precio de una GPU de última generación se sitúa en
torno a los 300 euros, el precio de un cluster puede ser mucho mayor,
además de resultar en una serie de condiciones desfavorables desde el
punto de vista de su implantación como módulo de procesamiento a
bordo del sensor, con diferentes aspectos que pueden afectar de forma
negativa al payload
de la misión (peso, consumo energético,
calentamiento, mantenimiento, etc.) En este sentido, las GPUs ofrecen
una solución mucho más compacta, si bien es cierto que es preciso
realizar un estudio detallado de las condiciones de tolerancia de las
GPUs a requimientos extremos en cuanto a consumo y sensibilidad a
radiación, necesario a la hora de calibrar la adaptabilidad de esta
plataforma hardware especializada a misiones reales de observación
remota de la tierra.
• Como resultado de nuestro estudio, se han aplicado todas las métricas
de precisión y rendimiento computacional a una batería de imágenes
simuladas (con información muy precisa acerca de la ubicación de los
píxels puros) y reales y se ha realizado un detallado estudio
comparativo en términos de precisión y rendimiento computacional de
las diferentes implementaciones planteadas (ENVI, C y CUDA),
ofreciendo resultados que pueden ser relevantes para la comunidad
científica
y, en particular, para la comunidad dedicada a
implementación eficiente de algoritmos de análisis hiperespectral.
Para concluir este capítulo, planteamos algunas líneas futuras de
trabajo adicionales que serían interesante perseguir en futuras ampliaciones
de este proyecto:
•
Se ha hablado de que la principal ventaja de la implementación GPU con
respecto al uso de cluster es el aspecto económico; sin embargo no se ha
podido realizar ningún tipo de comparación real entre ambas soluciones
en cuanto resultados y tiempos de ejecución, luego sería interesante
realizar dicho estudio en el futuro.
•
Una alternativa interesante a la metodología propuesta viene dada por la
posibilidad de implementar algoritmos paralelos en clusters de GPUs,
aprovechando las ventajas de ambos paradigmas de computación paralela.
76
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
•
Por otra parte, y con vistas a extrapolar los resultados obtenidos en el
estudio a otras aplicaciones, otra línea futura de trabajo deberá consistir
en probar la implementación GPU con distintos tipos de imágenes (uno de
los problemas de CUDA, es que hoy por hoy no dispone de funciones
para realizar la carga de ficheros de imágenes directamente en espacios de
memoria, excepto para las imágenes de tipo PPM y PGM, con lo cual se
produce una carga de imagen quizá poco optimizada).
•
Finalmente, como línea futura de trabajo se propone optimizar la versión
CUDA actualmente disponible utilizando diferentes estrategias. Por
ejemplo, la versión presentada en este PFC sólo usa la GPU para realizar
el cálculo escalar; pero también podría estudiarse la opción de que
realizara en la misma otras operaciones, tales como la búsqueda del
máximo y el mínimo por ejemplo. En este PFC se adjunta en los archivos
una versión que contempla esta solución; pero no se ha añadido a los
resultados por proporcionar peores resultados en cuanto al tiempo de
ejecución que los mostrados en el apartado de análisis y discusión de
resultados de la presente memoria.
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
77
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
7. Referencias bibliográficas
1.
Chang, C.-I, Hyperspectral Imaging: Techniques for Spectral Detection and
Classification, Kluwer Academic/Plenum Publishers, 2003.
2.
Plaza, A., Chang, C.-I, “Impact of Initialization on Design of Endmember
Extraction Algorithms,” IEEE Transactions on Geoscience and Remote
Sensing, vol. 44, no. 11, pp. 3397-3407, 2006.
3.
Plaza, A., Martínez, P., Pérez, R.M., Plaza, J.. “Spatial/Spectral Endmember
Extraction
by
Multidimensional
Morphological
Operations”.
IEEE
Transactions on Geoscience and Remote Sensing, vol. 40, no. 9, pp. 20252041, 2002.
4.
Green, R.O. et al., “Imaging spectroscopy and the airborne visible/infrared
imaging spectrometer (AVIRIS),” Remote Sens. Environ., vol. 65,pp. 227–
248, 1998.
5.
Landgrebe, D., “Hyperspectral Image Data Analysis”, IEEE Signal
Processing Magazine, vol. 19, no. 1, pp. 17-28, 2002.
6.
Landgrebe, D., “Multispectral Data Analysis, A Signal Theory Perspective”
http://dynamo.ecn.purdue.edu/~biehl/MultiSpec/documentation.html, 1998.
7.
Goetz, A.F.H., Kindel, B., “Comparison of Unmixing Results Derived from
AVIRIS, High and Low Resolution, and HYDICE Images at Cuprite, NV”.
En: Proc. IX 4ASA/JPL Airborne Earth Science Workshop, Pasadena, CA,
1999.
8.
Goetz, A. F., & Kindel, B. (1999). "Comparison of Unmixing Result Derived
from AVIRIS, High and Low Resolution, and HYDICE images at Cuprite,
NV". Proc. IX 4ASA/JPL Airborne Earth Science Workshop .
9.
Boardman, J., Kruse, F., & Green, R. (1995). "Mapping target signatures via
partial unmixing of AVIRIS data". Proc. Summaries JPL Airborne Earth Sci.
Workshop , 23-26.
10.
Green, R.O. y Pavri, B., “AVIRIS In-Flight Calibration Experiment,
Sensitivity Analysis, and Intraflight Stability”, en Proc. IX 4ASA/JPL
Airborne Earth Science Workshop, Pasadena, CA, 2000.
78
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
11.
Heinz, D. y Chang, C.-I, "Fully constrained least squares linear mixture
analysis for material quantification in hyperspectral imagery," IEEE Trans. on
Geoscience and Remote Sensing, vol. 39, no. 3, pp. 529-545, March 2001.
12.
Plaza, A., Martínez, P., Pérez, R.M., Plaza, J., “A quantitative and
comparative analysis of endmember extraction algorithms from hyperspectral
data,” IEEE Trans. On Geoscience and Remote Sensing, vol. 42, no. 3, pp.
650-663, March 2004.
13.
Bateson, C.A., Curtiss, B., “A method for manual endmember selection and
spectral unmixing,” Remote Sensing of Environment, vol. 55, pp.229–243,
1996.
14.
Plaza, A., Valencia, D., Plaza, J. y Chang, C.-I, “Parallel Implementation of
Endmember Extraction Algorithms from Hyperspectral Data”. IEEE
Geoscience and Remote Sensing Letters, vol. 3, no. 3, pp. 334-338, July 2006.
15.
Plaza, A., Plaza, J., Valencia, D., “AMEEPAR: Parallel Morphological
Algorithm for Hyperspectral Image Classification in Heterogeneous Networks
of Workstations.” Lecture 4otes in Computer Science, vol. 3391, pp. 888891, 2006.
16.
Setoain, J., Prieto, M., Tenllado, C., Plaza, A., Tirado, F., “Parallel
Morphological
Endmember
Extraction
Using
Commodity
Graphics
Hardware,” IEEE Geoscience and Remote Sensing Letters, vol. 43, no. 3, pp.
441-445, 2007.
17.
Pérez, R.M., Martinez, P., Plaza, A., Aguilar, P.L. “Systolic Array
Methodology for a Neural Model to Solve the Mixture Problem”, in: 4eural
4etworks and Systolic Array Design. Edited by D. Zhang and S.K. Pal. World
Scientific, 2002.
18.
Lavenier, D., Fabiani, E., Derrien, S., Wagner, C., “Systolic array for
computing the pixel purity index (PPI) algorithm on hyper spectral images”.
19.
NVIDIA GeForce 8800 GPU Architecture Overview (November 2006 TB02787-001_v0.9)
20.
NVIDIA CUDA Compute Unified Device Architecture – Programming
Guide, Versión 1.1 (29/11/07)
Proyecto Fin de Carrera de Ingeniería Informática – Autor: Hugo María Vegas Carrasco
79
Implementación de algoritmos de tratamiento de imágenes en tarjetas gráficas programables
21.
NVIDIA CUDA. Installation and Verification on Microsoft Windows XP and
Windows Vista (C Edition). (August 2008 | DU-04165-001_v01)
22.
CUDA Technical Training. Volumen 1: Introduction to CUDA Programming
(Prepared and Provided by NVIDIA. Q2 2008)
23.
CUDA Technical Training. Volumen 2: CUDA Case Studies (Prepared and
Provided by NVIDIA. Q2 2008)
80
Proyecto Fin de Carrera Ingeniería Informática - Hugo María Vegas Carrasco